
Abstract
In the control of the rotary crane, it is important to consider the trade-off between the boom positioning characteristics and the sway of the load. However, it seems difficult to obtain good control performance in both of them using 1-degree-of-freedom control approach. Therefore, a robust 2-degree-of-freedom control approach is proposed in this article. First, a linear dynamic model of a rotary crane is derived using a disturbance observer. Next, a state feedback controller with integrator is designed based on the model, and controller gains are determined by using linear matrix inequality optimization for achieving robustness with respect to rope length variance. Then, a feedforward controller is designed by solving an optimal regulator problem based on the model of closed-loop system for improving the boom positioning characteristics of the crane. Finally, the experimental results confirm the effectiveness of the proposed method. Hence, the crane can be easily operated without sensor systems for measuring rope length, and consequently, the structure of the crane can be simplified and implementation cost can be reduced.
Introduction
Because crane systems use fewer actuators and have a simpler structure than industrial robots, they are widely used to transport heavy loads and hazardous material in industrial locations, such as shipyards, factories, nuclear installations, railway yards, and high-rise construction sites. From their structures, shapes, and purposes, cranes can be classified into two major types: overhead cranes and rotary cranes. 1
Unlike overhead cranes, rotary cranes do not require large equipment such as traveling rails, and hence, they are also used in environments with limited space such as on vehicle trucks. However, one-dimensional horizontal motion of booms on such cranes typically generates undesirable two-dimensional (2D) load sway, and the nonlinearity in crane system caused by this motion cannot be ignored. Hence, load vibration suppression control for rotary cranes is an essential issue. Moreover, automatic control methods are needed so that even unskilled crane operators can control them safely. The main purpose of this study is to propose a controller for moving the load from point to point as well as suppressing load vibration from the viewpoint of reducing the burden on human operators and increasing their safety.
To accomplish the above purposes, various control schemes have been developed for crane systems. These methods can be classified into two major types: open-loop methods that can suppress load vibration without requiring load vibration information, such as input shaping techniques,2–6 and closed-loop methods that suppress load vibration using load vibration information measured by sensor systems in real time, also commonly applied to crane systems.7–11 Xi et al. proposed a continuous function by convolving the original command to suppress vibration in flexible systems. The effectiveness of the proposed method was validated by the simulations and experiments. 2 Maleki et al. proposed a two-mode specified insensitivity (SI) shaper to reduce the two-mode oscillatory dynamics in double-pendulum boom cranes. The experiments confirmed the effectiveness of the proposed method. 3 Maleki et al. also proposed a zero-vibration (ZV) input shaper to the vertical direction and horizontal direction of a nonlinear boom crane to reduce the two-mode load vibration, respectively. The experimental results verified both the complex dynamics and the effectiveness of input shaping. 4 Singhouse et al. compared input shaping with notch and low-pass filtering for suppressing vibration in mechanical systems. The experimental results confirmed that input shapers obtained better vibration rejection performance than notch or low-pass filters (LPFs). 5 Ahmad et al. 6 proposed a hybrid controller consisting of an input shaper with specified negative amplitude (SAN) and a proportional–derivative (PD) controller for horizontal angle position control of a rotary crane; smaller load vibration and faster horizontal angle position were obtained by the proposed method throughout the experiments. Although the input shaping techniques have been widely used in crane systems, the shaper should be designed through measuring the natural frequency and damping ratio of the rope-load vibration system exactly. Fang et al. proposed a high-performance nonlinear controller for an offshore boom crane to drive the system states to track some planned trajectories, even in the presence of persistent disturbance in harsh sea conditions. The stability of the designed closed-loop system was proven by Lyapunov techniques. The effectiveness of the proposed method was validated by the simulations and experiments. 7 H Sano et al. proposed a novel load vibration observer and a disturbance observer to solve the delay problem of the vision feedback system and the frictional disturbance in overhead crane. The effectiveness of the proposed method has been verified by the simulations and experiments. 8 Sun et al. proposed a novel output feedback controller to solve the problem of the observing noise for a 2D overhead crane. The simulations and experimental results confirmed the effectiveness of the proposed method. 9 Tuan et al. proposed a nonlinear controller based on partial feedback linearization for the three-dimensional motion of an overhead crane. Both the simulation and experimental study were carried out to confirm the effectiveness of the proposed controller. 10 Inukai et al. proposed linear state feedback controllers for vertical directional subsystem and horizontal directional subsystem of a rotary crane, and the information of boom angles, load vibrations, and their angular velocities were obtained by an installed stereo vision system. The experimental results demonstrated the proposed method. 11
In addition, other control schemes have also been proposed for crane systems including gain scheduling control,
12
sliding mode control,13–15 adaptive control,16–19 nonlinear control based on Lyapunov stability theory,20,21 model predictive control methods,22–24 linear matrix inequality (LMI)-based mixed
In most of the existing control schemes, only one kind of controller was used for crane systems. It is so called one-degree-of-freedom (1DOF) control approach. In the control of the rotary crane, it is important to consider the trade-off between the boom positioning characteristics and the sway of the load. However, it seems difficult to obtain good control performance in both of them using 1DOF control approach. Therefore, a two-degree-of-freedom (2DOF) control approach is needed. Similar 2DOF controllers have been proposed for crane systems and other flexible structures.27–32 Ahmad et al. proposed a PD with input shaper controller for anti-sway control of gantry cranes. The effectiveness of the proposed method was demonstrated by comparing a traditional PD controller and a PD–proportional–integral–derivative (PID) controller experimentally. 27 Fujioka et al. proposed an input-shaped model reference control method for a double-pendulum crane using a linear single-pendulum crane as the reference model. The performance of the proposed controller was tested by the simulations and experiments.28,29 Zain et al. proposed a genetic algorithm (GA)-based PD with input shaper controller for flexible manipulator systems. Comparative results demonstrated the effectiveness of the proposed method. 30 Mohamed et al. proposed a hybrid controller which consists of a PD controller and an input shaper for vibration reduction in a flexible manipulator system. The effectiveness of the proposed method was verified by the simulations and experiments.31,32 However, the variation of the natural frequency of the vibration system which affects the stability and control performance of the whole system significantly was not considered in the aforementioned literatures. Moreover, input shaper–based feedforward controller typically has poor robustness with respect to this parameter, especially when its variation range is quite large. Hence, a robust 2DOF control system is proposed in this article.
In our previous work, 33 a state feedback controller with an integrator based on LMI optimization was developed for the crane system for achieving robust control performance. In order to improve the boom positioning characteristics and load vibration reduction performance of the crane, a feedforward controller is designed by solving an optimal regulator problem based on the model of closed-loop system. Finally, the effectiveness of the proposed method is demonstrated by the experimental results.
Analytical model of rotary crane
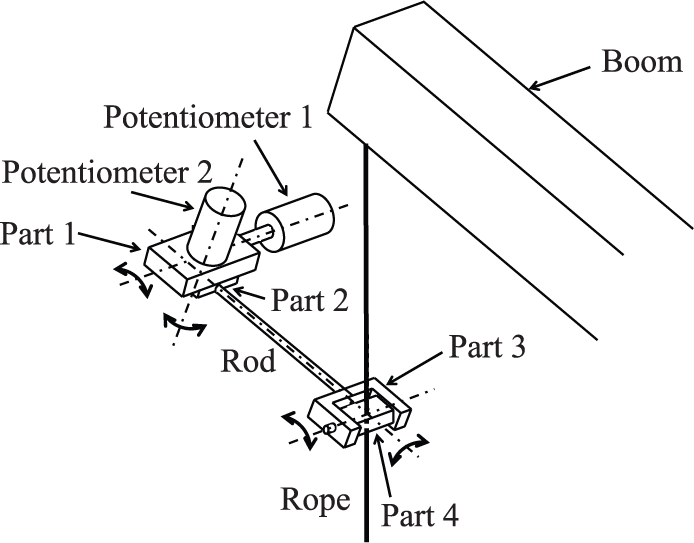
This section describes the dynamics of the rotary crane whose schematic model is shown in Figure 1.

Schematic model of rotary crane.
The equations of motion for a rotary crane are 33


where g,
To compensate for the effect of disturbances, the following disturbance observer is applied to equation (3) 33

where s,

We have confirmed the effectiveness of this disturbance observer–based controller under frictional disturbance and load mass changing. 33
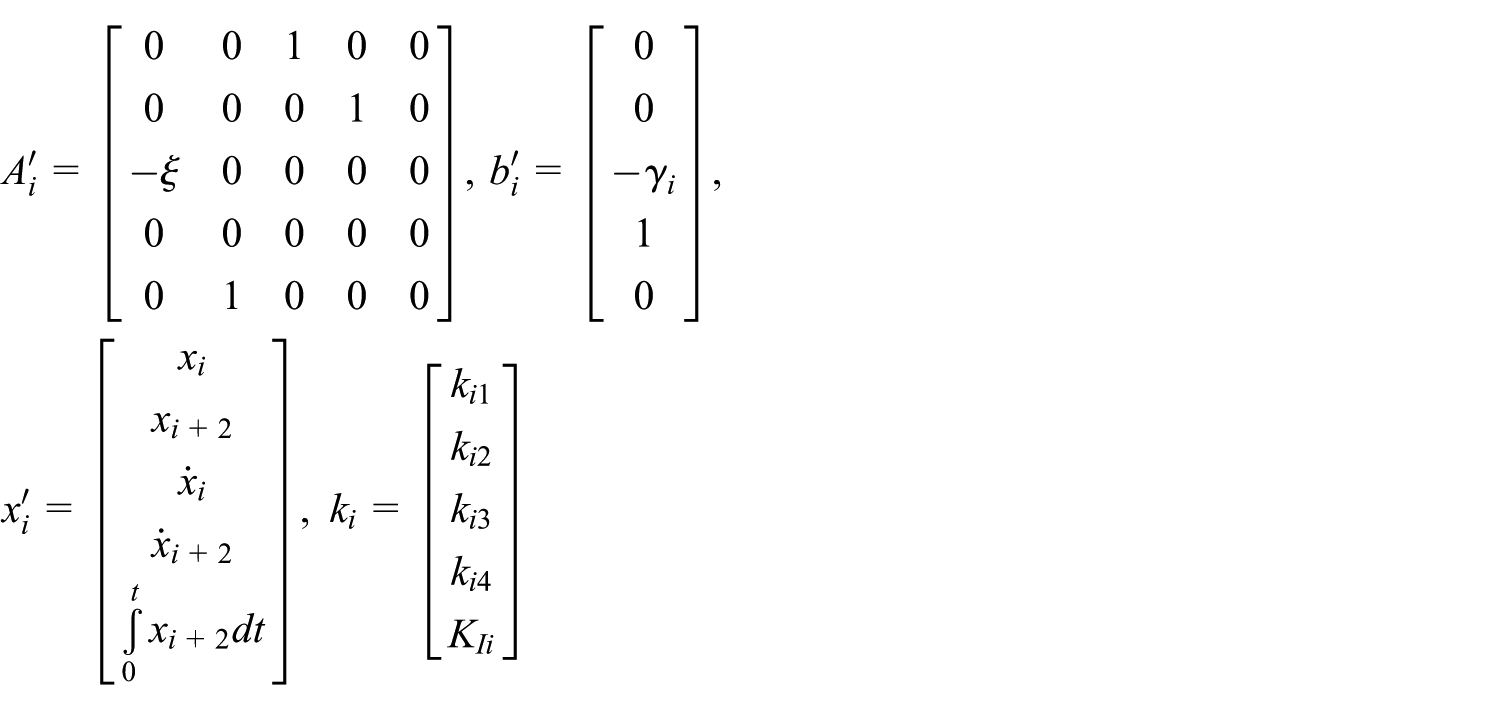
Considering the assumptions in Sano et al., 33 the linearized dynamical model of rotary crane is presented as follows


where
Robust 2DOF control system design
This section presents a robust 2DOF controller for achieving both boom positioning control and load vibration suppression simultaneously. The block diagram of the 2DOF control system is shown in Figure 2. Functions

Two-degree-of-freedom control system.
Feedback controller design via LMI optimization
Because natural frequency of the rope-load oscillation system affects the stability and performance of the control system, the controller design should consider robustness with respect to rope length variance. If the control system considers the effect of rope length variance, the crane’s motion can be controlled without a sensor system for measuring it. This section presents a controller for achieving robust performance with respect to rope length variance on the basis of an LMI approach. 33
The closed-loop system of the linearized rotary crane control system with an integrator is presented as follows

where



where
It has been demonstrated that if the system in equation (7) satisfies the pole placement condition mentioned in equation (8) at both ends of the rope length variation region, the system also satisfies the pole placement condition with any rope length within the variation region. 33
Feedforward controller design via optimal regulator
This section presents a robust feedforward controller for achieving the trade-off between the boom positioning characteristics and the sway of the load. The structure of the controller is designed as shown in Figure 3, which is equivalent to the function





Feedforward controller.
where
The gain


we obtained

where P is a definite positive matrix, and it is satisfied following the Riccati equation

Experimental results and discussion
Experimental system
The experimental system is shown in Figure 4. The same direct current (DC) servo motors are used for both vertical and horizontal boom motions. The vertical and horizontal boom angles

Experimental system.
The load sway angles
Sensor system for measuring load sway.
Reference trajectory
In theory, any kind of trajectories such as step trajectories, cycloid curve trajectories, and input-shaped trajectories can be applied to crane systems for evaluating the control performance of the proposed controller; however, the step ones typically are not used in real crane operations because of their discontinuity, and the input-shaped ones could be redesigned when the natural frequency of the load-rope vibration system greatly changed. Nevertheless, cycloid curve ones provide zero acceleration at the initial and terminal points and are widely used in industrial applications. Hence, the following cycloid curve is employed to describe the original desired angular trajectory of the boom

where
Experimental conditions
The closed-loop system in equation (7) can be approximately seen as a second-order system, and it is said that the damping coefficient of the second-order system




Parameters of rotary crane.

It is noted that the gains
Experimental results
In order to demonstrate the effectiveness of the proposed 2DOF control system, we conducted experiments and set the rope length to

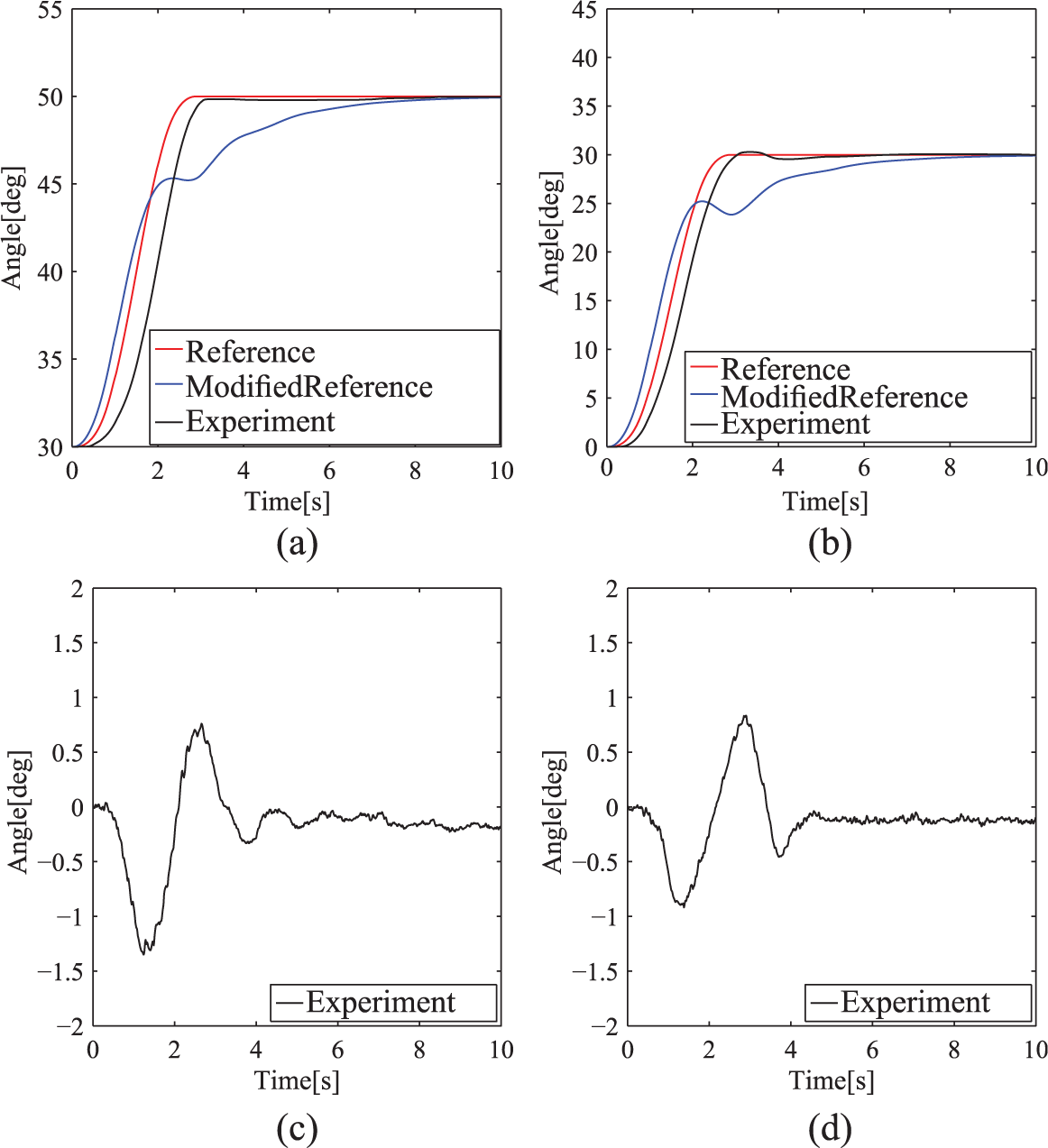
Proposed controller results (l = 0.25 m): (a) vertical boom angle θ 3, (b) horizontal boom angle θ 4, (c) load sway angle θ 1, and (d) load sway angle θ 2.
Proposed controller results (l = 0.50 m): (a) vertical boom angle θ 3, (b) horizontal boom angle θ 4, (c) load sway angle θ 1, and (d) load sway angle θ 2.

Proposed controller results (l = 0.75 m): (a) vertical boom angle θ 3, (b) horizontal boom angle θ 4, (c) load sway angle θ 1, and (d) load sway angle θ 2.
Moreover, we conducted a comparative experiment to verify the effectiveness of the proposed method by an approach proposed in Sano et al.
33
In this design, the same LMI-based feedback controller as shown in section “Feedback controller design via LMI optimization” was used to the same crane system to obtain good control performance. The resulting vertical boom angle

Comparative experimental results (l = 0.25 m): (a) vertical boom angle θ 3, (b) horizontal boom angle θ 4, (c) load sway angle θ 1, and (d) load sway angle θ 2.

Comparative experimental results (l = 0.50 m): (a) vertical boom angle θ 3, (b) horizontal boom angle θ 4, (c) load sway angle θ 1, and (d) load sway angle θ 2.

Comparative experimental results (l = 0.75 m): (a) vertical boom angle θ 3, (b) horizontal boom angle θ 4, (c) load sway angle θ 1, and (d) load sway angle θ 2.
Conclusion
In order to obtain the trade-off between the boom positioning characteristics and the sway of the load, a robust 2DOF control approach was proposed. After deriving the linear dynamics of the rotary crane motion on the basis of the disturbance observer, the feedback controller which has robustness with respect rope length variance was designed by LMI optimization. Then, the feedforward controller was designed by solving an optimal regulator problem based on the model of closed-loop system. Although the settling time obtained by the proposed method was slower than that obtained by LMI-based method, better performance of the convergence of boom positioning was obtained. Furthermore, the load sway angle during the transfer process was about 50% reduced by the proposed method. However, we did not consider the situation in which the rope length changes and the effect of the speed of the change in rope length with respect to the stability and the performance of the control system during transfer. We will propose a gain scheduling or adaptive control method to solve the above problem in future work.
Footnotes
Academic Editor: Rahmi Guclu
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported, in part, by the National Natural Science Foundation of China under Grant 51277092; in part, by the Natural Science Foundation of Jiangsu Province under Grant BK20130938; and, in part, by the Natural Science Foundation of the Jiangsu Higher Education Institutions of China under Grant 14KJB510013.