
Abstract
Here, we propose an autonomous path planning solution using backpropagation algorithm. The mechanism of movement used by humans in controlling their arms is analyzed and then applied to control a robot manipulator. Autonomous path planning solution is a numerical method. The model of industrial robot manipulator used in this article is a KUKA KR 210 R2700 EXTRA robot. In order to show the performance of the autonomous path planning solution, an experiment validation of path tracking is provided. Experiment validation consists of implementation of the autonomous path planning solution and the control of physical robot. The process of converging to target solution is provided. The mean absolute error of position for tool center point is also analyzed. Comparison between autonomous path planning solution and the numerical methods based on Newton–Raphson algorithm is provided to demonstrate the efficiency and accuracy of the autonomous path planning solution.
Introduction
The control and movement of arm play an important role in our daily life. It is very easy for humans to reach visual targets, such as pressing several keys. In many behavioral experiments, subjects were asked to move their arm till their fingertip reaches a dot in space which was set at a random position. 1 Even we can control our hand to reach proprioceptive targets in the absence of vision. 2 In addition, humans do not know the accurate model of their body, such as the length of their arm and fingers, and they also do not need the accurate model of the world, such as the Cartesian coordinate of the original position and the endpoint. However, a precise model and a good algorithm are the basics of controlling an industrial robot. Current industrial solution is not intelligent enough. We can make robot more intelligent by mimicking the mode of human motion.
The inverse kinematics (IK) problem is a major theme in most researches and applications of industrial robot manipulators, such as path planning, offline programming, arc welding, and painting and machining. While the manipulator is a complex system, an ideal solution of the IK problem is always difficult to solve. In the literature, most of the methods to solve the IK problem can be classified into analytical methods and numerical methods. 3 The analytical methods mainly consist of algebraic methods4,5 and geometric methods. 6 However, some IK problems cannot be solved if the robot manipulators do not have closed form.
The numerical methods to solve IK problem can also be classified into two types. 3 The first type of numerical methods consists of solutions based on Newton–Raphson (NR) method, 7 and the solutions are based on predictor–corrector algorithms. 8 The singularity problem is always difficult to solve when this kind of method is used, although some solutions are proposed to avoid the singularities. 9 The other types of numerical methods use different gradient-based nonlinear algorithms to solve IK problem, and this kind of method usually does not use Jacobian matrix. 10 However, the accuracy of numerical methods is always influenced by the initial value of joint variables.
Some intelligent methods for solving IK problem based on intelligent algorithm also have been developed, such as approaches based on artificial neural network (ANN),11–13 fuzzy system, 14 and genetic algorithm. 15 In addition, there are many methods based on other theory, such as conformal geometric space theory, 16 double quaternion, 17 and planar curves intersecting. 18 Backstepping method is also a powerful technique for the robotic system. 19 However, these methods have not yet been widely used.
Although all above-mentioned methods play an important role in the development of robot manipulator, no one is comparable to the method used by mankind to control their arm. By mimicking arm movement, we propose an autonomous path planning solution (APPS) for industrial robot manipulator using backpropagation (BP) algorithm, which has a good performance in solving IK problem. We analyzed the mechanism of human beings for controlling and moving their arms and then introduced it to control the industrial robot manipulator. Since the APPS is not involved with Jacobian matrix, it can converge to solution even when singularity exists.
The rest of this article is organized as follows. Section “Control and movement of arm in mankind” describes the mechanism of arm movement for mankind. Section “Autonomous path planning solution” introduces the mechanism of arm movement into the method which is used to control robot manipulator, and the APPS based on BP algorithm is explained. Section “Experiment validation” presents experiment validation to show the verification of the APPS. Section “Comparison between APPS and NR” presents comparison between APPS and the numerical methods based on NR algorithm. The conclusion is presented in section “Conclusion.”
Control and movement of arm in mankind
Because of the complexity of the central nervous system (CNS), we still cannot explain how humans control their arm and how proprioception is formed from the microperspective. 1 But the fact is that no sophisticated industrial manipulator which has accurate model and global information is comparable to the arm of humans in the aspect of flexibility.
The process of reaching an endpoint for a person using his arm can be classified into three phases: in the first phase, the tester helds his or her arm still in an initial condition; the second phase was an intermediate state that the tester was moving his or her arm, but the finger did not reach the endpoint; in the third phase, the tester’s finger reached the endpoint set in the space (Figure 1). The whole process was under the control of CNS, no matter the endpoint was visible or remembered (Figure 2). Using this method, CNS just needs to determine whether fingers reached the endpoint and what to do next, without performing complex calculations. In the following sections, we will introduce this mechanism into the control of industrial robot manipulator.
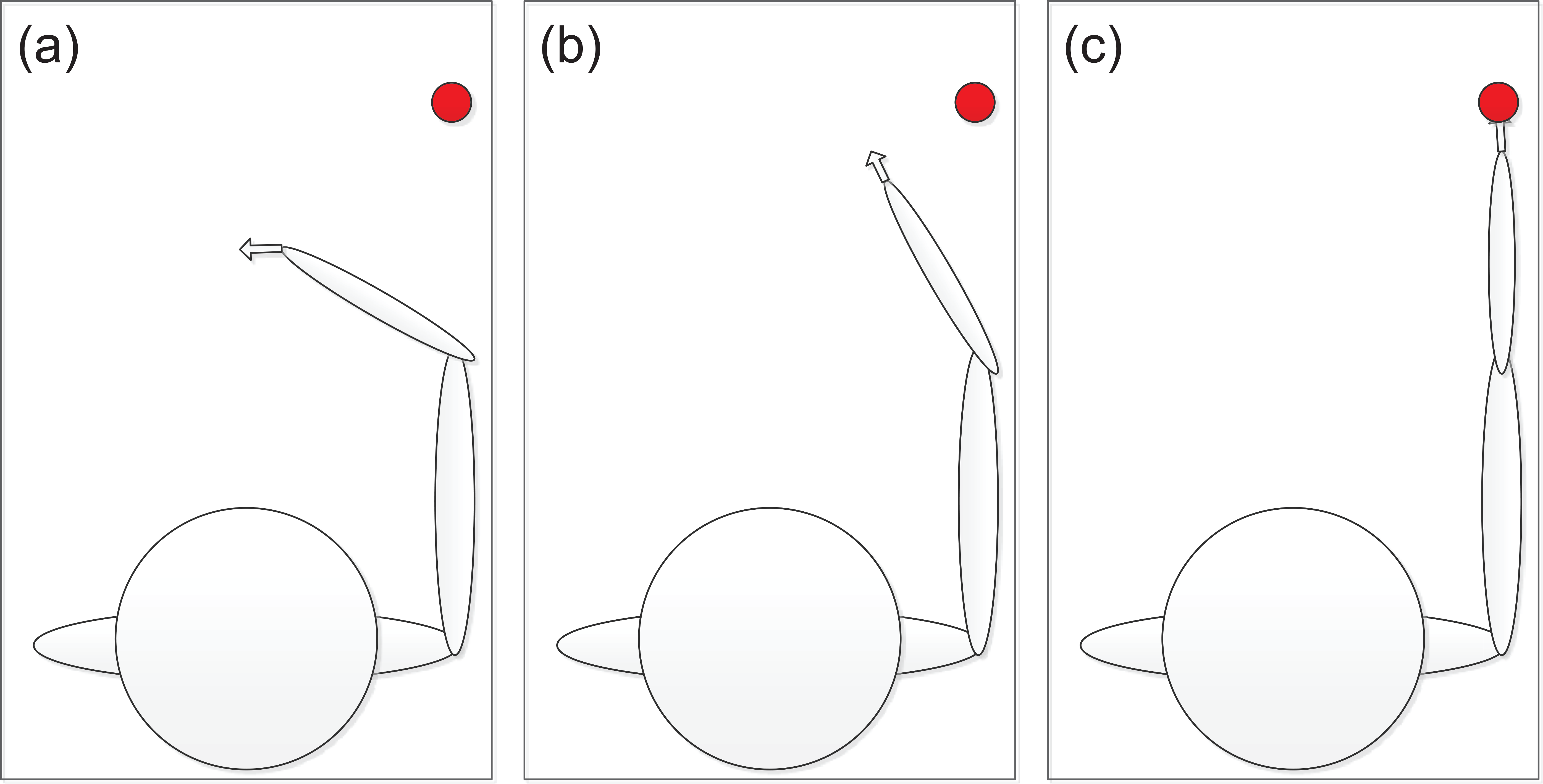
Process of reaching an endpoint: (a) initial condition, (b) intermediate condition, and (c) final condition.

Mechanism of arm movement.
APPS
APPS for industrial robot manipulator using BP algorithm is proposed according to the mechanism of arm movement.
Forward kinematics
In the following discussion, we use the model of KUKA KR robot which is a 6R industrial robot. We build the homogeneous transformation matrix for a single joint

where s and c denote the sin and cos functions. We can get the forward kinematics of the tool center point (TCP) of KUKA KR robot with respect to the base frame through the following equation

where
Error between the current condition and the target condition
We can set a target condition for the TCP by determining the value of each joint, choosing


We can also set a target condition for the TCP by determining the elements of


We define the error


An alternative representation of


The value of error E depicts the distance between the current position and the target position. In order to judge whether the TCP has reached the destination, we set a constant value of E
0 which was used to compare with the current value of E. We can conclude that the TCP has reached the destination if

where k = 1, 2, 3, 4, 5, 6.
BP
BP algorithm is widely used in ANN, and this type of ANN has been applied to many areas successfully, such as traffic noise prediction,20,21 landslide susceptibility mapping,
22
and medical research.
23
If

where k = 1, 2, 3, 4, 5, 6 and

Using equations (9) and (10), equation (14) can be changed as follows

Using equation (7), we can get the following equation

We can get equations (17), (18), and (19), where k = 2, 3, 4, 5, by changing equation (16) using equation (6)



Using equations (13), (15), (16), (17), (18), and (19), we can calculate the value of incremental joint angles

where k = 1, 2, 3, 4, 5, 6 and

The joint variable
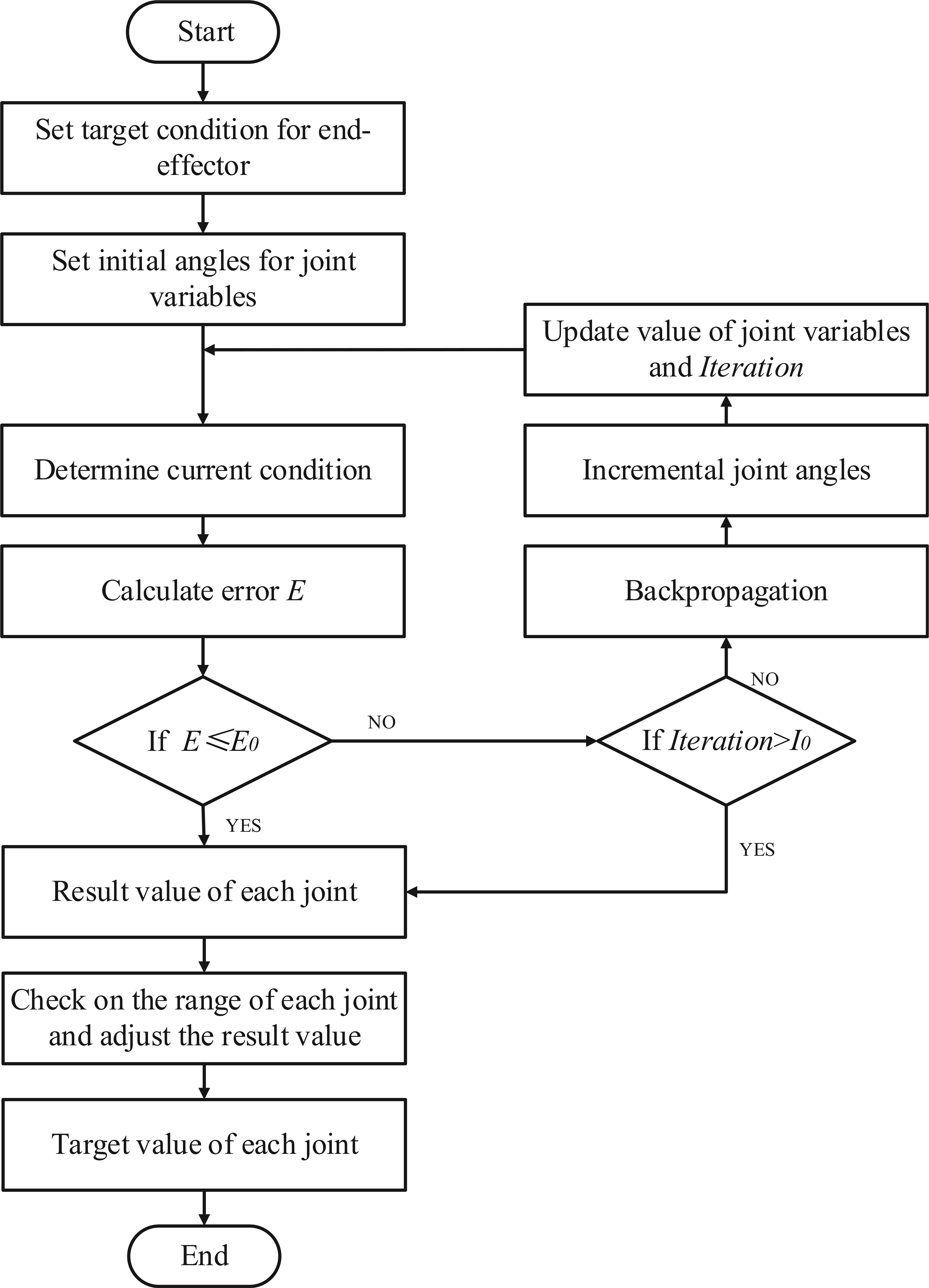
Flow chart of APPS for industrial robot.
Experiment validation
The model of industrial robot used in this article is KUKA KR 210 R2700 EXTRA as shown in Figure 4. According to the official documentation on KR 210 R2700 robot, the repeatability of KR 210 R2700 is ±0.006 mm. However, this repeatability is really hard to achieve in actual operation. Figure 4(a) is a testbed of KR 210 R2700, and it illustrates the experiment environment of this industrial robot. Coordinate frames of KR 210 R2700 EXTRA robot are illustrated in Figure 4(b) (Table 1).
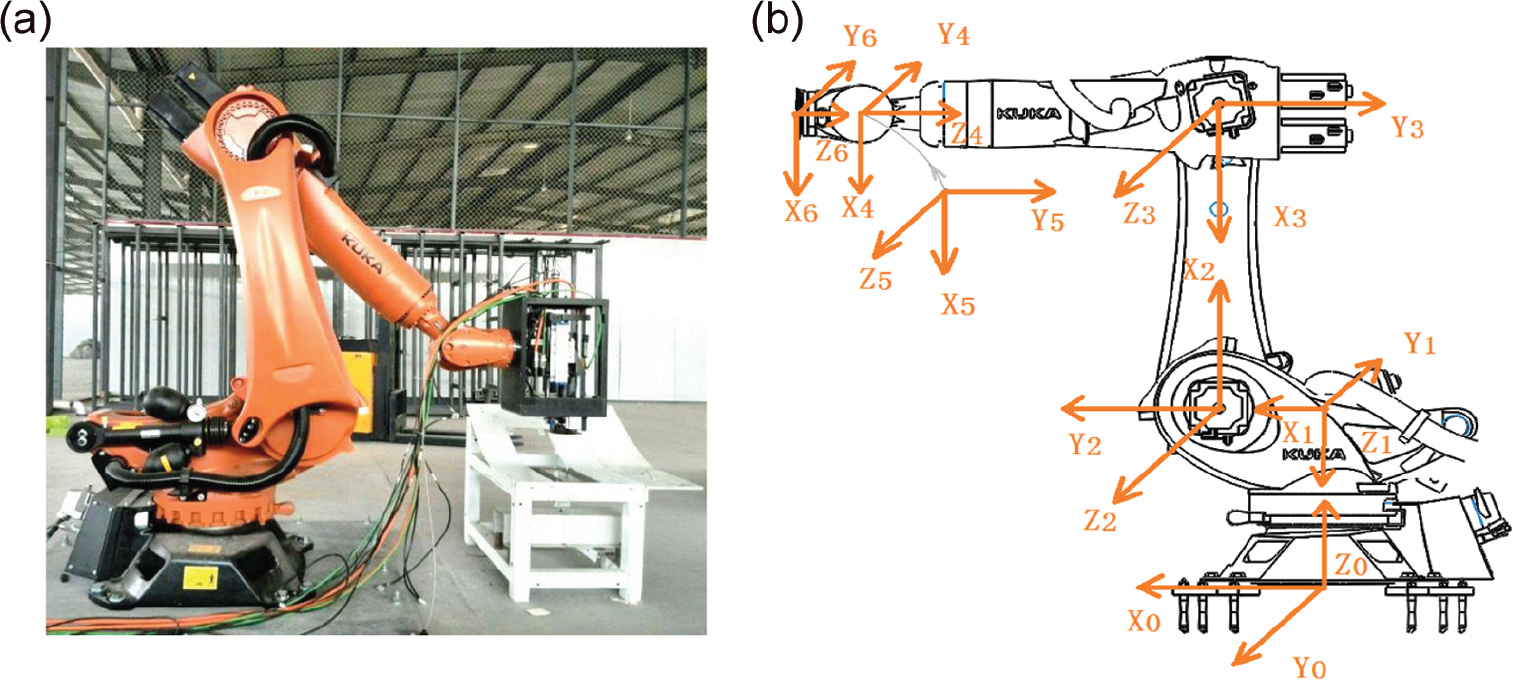
KUKA KR 210 R2700 EXTRA robot: (a) testbed and its experiment environment and (b) coordinate frames.
Denavit-Hartenberg parameters of KUKA KR 210 R2700 EXTRA robot.

A collision-free path usually consists of a series of points in space for TCP, with the target orientation and position. The process of path tracking using APPS is illustrated in Figure 5, where N denotes the total number of steps. In each step, TCP of the robot manipulator is controlled to move to the next point, and the changes of joint angles are determined by APPS. A typical collision-free path for KR 210 R2700 EXTRA robot manipulator generated by high end path planner is illustrated in Figure 6,24,25 where target point denotes target position of the TCP and initial point denotes the initial position of the TCP. In our experiment, the TCP is controlled to start from initial point, reaches all target points sequentially, and returns to initial point. The TCP is controlled to track the path in the whole experiment. This experiment can be applied to the drilling system in industrial manufacturing.

Process of path tracking using APPS.
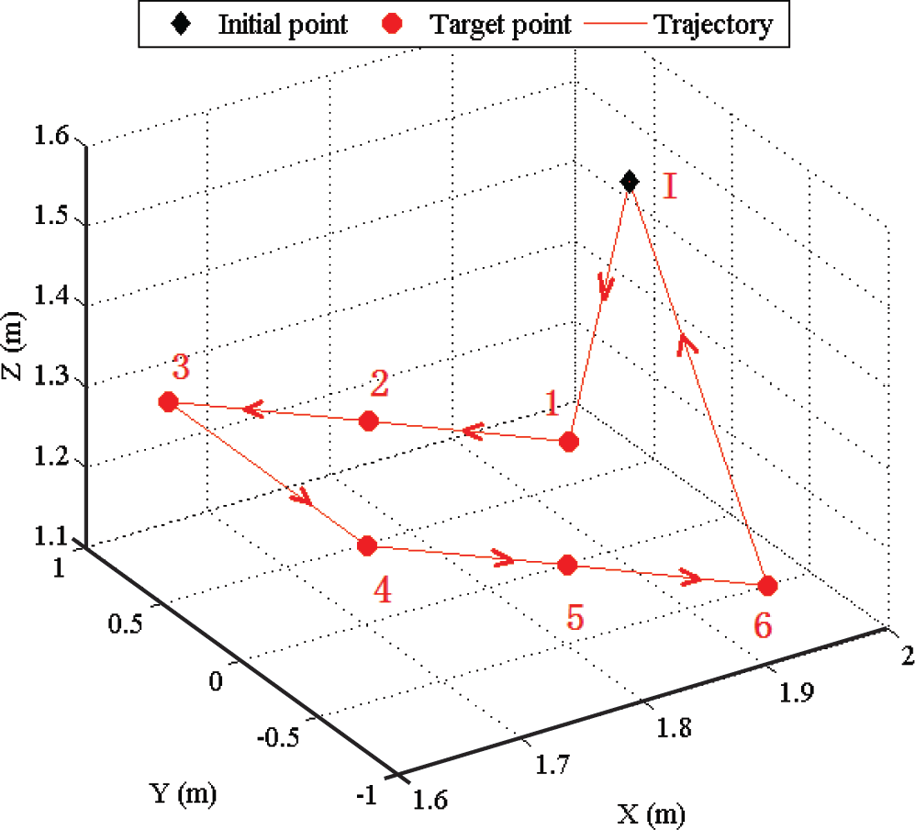
A typical collision-free path.
The position of TCP for each step is illustrated in Table 2, where PI denotes the position of TCP in initial point. Pk denotes the position of TCP in target point k, where k = 1, 2, 3, 4, 5, 6. The X, Y, and Z denote the coordinates of TCP in Cartesian space with respect to the base frame.
The position of TCP for each point.

TCP: tool center point.
In this experiment, we set target condition for the TCP by determining the elements of

where
Configuration and results of APPS for joint variables.

APPS: autonomous path planning solution.
However, the result attained by implementing APPS does not mean the result that a physical robot can actually reach. There are many issues which must be taken into consideration in actual operation of industrial robot, such as control precision for joint angles, mechanical error, and environment noise. We get the values of R
2 by rounding R
1 to two decimal places. R
2 represents the result which is actually reached by KUKA KR 210 R2700 robot. R
2/I denotes that R
2 in current motion is the I of the next motion. The motion 0 denotes the configuration of joint variables when we start the experiment, and it can be any possible configurations. Before we start the experiment, we recorded the joint angles of motion 0
The processes of motion I-1, 3-4, and 6-I are presented in Supplementary Materials. Additionally, the motion introduced here does not represent the movement of physical robot, and they denote the virtual process in solving IK problem. The actual movement of industrial robot should be planned by high end path planner.24,25
The position of TCP with respect to the base frame is illustrated in Table 4. T denotes the target value according to Table 2. We introduce mean absolute error (MAE) of position as evaluation index for the performance of APPS (Table 5).

Position of TCP in each motion.

TCP: tool center point.
MAE of position for TCP.

MAE: mean absolute error; TCP: tool center point.
Thus, we can conclude that the APPS converges to target solution very well, with a very tiny TCP position MAE of 0.12, 0.08, 0.02, 0.02, 0.09, 0.12, and 0.05 mm in each step (Table 4). The MAE in this system is illustrated in Figure 7.

Mean absolute error of position for TCP.
In this experiment validation, we controlled the KUKA KR robot to track a collision-free path using APPS algorithm. The MAE is used as evaluation index for each motion. This experiment validation proved that the MAE introduced by APPS is very tiny. The learning rate is a main influence factor to the performance of the APPS. Learning rate has a strong correlation to both computation time and convergence of APPS algorithm. We have performed sufficient experiments to determine the best value for the learning rate.
Comparison between APPS and NR
In order to show the accuracy and efficiency of APPS, comparison between APPS and the numerical methods based on NR method in path tracking is provided. As it is known to all, the numerical methods based on NR method requires six initial guess joint angles, and it would converges to the target value faster if the initial guess angles are accurate. Both APPS and NR are performed on an Intel i5 2.67 GHz with 4 GB RAM using MATLAB software program. The NR method is achieved using the robotics toolbox, which is a MATLAB-based toolbox. The toolbox provides many functions that are useful to the study of manipulators such as kinematics, dynamics, and path planning. 26 It is important to note that we use the modified DH parameter when constructing the calculation model of manipulator.
The computation time and iteration of motion given in Table 4 are illustrated in Table 6. The mean MAE of APPS is smaller (0.01 mm) in comparison to NR method (53.65 mm). The mean calculation time of APPS is also smaller (13.2238 s) in comparison to NR method (22.7067 s). The APPS method has many other advantages in comparison to NR method. First, we can conclude that the APPS performs well when singularity exists, such as in the process of motions I-1 and 5-6. The NR method cannot solve the IK problem in the process of motions 3-4 and 6-I, where the FALSE presents that NR algorithm fails to converge because of singularity. Second, the APPS does not need any accurate initial guess angles, while NR cannot converge to target values with inaccurate initial guess angles, such as in the process of motions 3-4 and 6-I. In the process of motion 3-4, the changes of each joint angle are 48.5404, 0, −0.0015, 99.4242, 0.0040, and −86.6430. The MAE of APPS is 0.01 mm in motion 3-4, while the MAE of NR is 59.53 mm. In the process of motion 6-I, the changes of each joint angle are −20.0878, −11.7988, −1.2501, 142.4315, −79.0311, and 32.6882. The MAE of APPS is 0 mm in motion 6-I, while the MAE of NR is 204.50 mm. In addition, the motions of I-1 and 6-I are two complex motions for the manipulator because the position and orientation of TCP are both changed. The MAE of APPS in motions I-1 and 6-I are 0.01 and 0, respectively. However, the NR method failed to converge in motion I-1, and the MAE of NR is 204.50 mm in motion 6-I.
Comparison between APPS and NR.

MAE: mean absolute error; APPS: autonomous path planning solution; NR: Newton–Raphson.
Conclusion
This article presented an autonomous inverse kinematic solution APPS to solve IK problem. The APPS is based on BP algorithm and it is an iterative solution. The experiment results prove that the APPS has a good performance compared with NR solution. As a numerical method, APPS has the following features: (1) it does not need an accurate initial angle guess, (2) it has low computational complexity and less number of iterations, and (3) it has high accuracy in path tracking. This study focused on determining the changes of joint angles in solving IK problem, and the dynamics problem and real-time control would be considered in the further research.
Footnotes
Acknowledgements
The participants in this research are all thankworthy for their contribution to the research.
Academic Editor: Zhijun Li
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (No. 61375085).