
Abstract
This article presents a bioinspired humanoid torso which is supposed to be used as the trunk for humanoid robots. It can effectively mimic motions of human torso with high degrees of freedom, and it has high stiffness and easy-to-control features. The main structure of the proposed torso is a six-degree-of-freedom serial mechanism with twist angles that are not equal to 0, π/2 or π and zero-length links. Forward kinematic and workspace analysis based on Denavit–Hartenberg and Monte Carlo methods have been formulated to analyze the feasibility of this structure. In addition, a hybrid method combing the large-scale regularity search capabilities of chaos optimization and the quasi-Newton method with relatively high-speed convergence has been proposed to analyze inverse kinematics. Simulations are carried out with the aim to validate the correctness and efficiency of this method for studying the inverse kinematics.
Introduction
The environment of modern society is designed for mankind. For example, the height of staircase, the shape of the driver’s seat and the position of the handrail are all designed according to human size and movement. Thus, when designing service robot, it’s more economical to develop humanoid robots than to modify the whole environment. This is one main reason that humanoid robots have been widely studied throughout the whole world.
For humanoid robots, legs and arms have been widely studied to realize walking and various operations. However, research of robot torso has been neglected for a long time in the past. Comparing to 1–3 degrees of freedom (DOFs) torsos of most humanoid robots, human torso is a complex system with multiple DOFs related to spine, muscles, brain, and skeleton. It plays an important role in human movements. Most presented humanoid robots 1 –5 are weak in aspects of high flexibility and large range of motions due to their oversimplified torso structures with 1–3 DOFs in waist.
Recently, some new torso structures of humanoid robots inspired by human torso have been reported. We investigated them and divided them into three main categories: serial, parallel, and hybrid structures. The cable-driven serial torso structures of Kotaro, 6 Kojiro, 7 Kenshiro, 8 and ECCE-3 9 with a large number of artificial muscles have high flexibility and can achieve large-scale bending motions. However, they have poor controllability and low load capacity. The parallel torso is based on a parallel manipulator that consists of a moving platform, a fixed base, and some identical actuated chains. This kind of torso can achieve typical movements of a human body, but the workspace is pretty small compared to serial robots. The hybrid torso structure combines the serial and parallel categories. This type has advantages of the abovementioned two kinds of structures. However, extra benefits come with extra prices. In addition, kinematics and dynamics analyses are complex issues due to the complicated hybrid structure.
In this article, a new humanoid torso has been proposed based on a special 6-DOF serial mechanism with twist angles that are not equal to 0, π/2 or π and zero-length links with the inspirations of human bionics. The advantages and feasibility of this mechanism have been carried out by kinematics analysis of the proposed torso structure.
The article is organized as follows: “The bioinspired humanoid torso” section introduces the mechanism of the proposed bioinspired humanoid torso. The “forward kinematics and workspace analysis” section clarifies the forward kinematics and workspace. The “inverse kinematics” section presents a detailed explanation of the inverse kinematics process and outlines the hybrid numerical approach. In addition, numerical examples of the proposed torso structure are also illustrated. In the “conclusion” section, the major results of this article are summarized.
The bioinspired humanoid torso
Human spine features four sagittal curves including cervical, thoracic, lumbar, and sacral curves, as shown in Figure 1(a). Curvature is qualified for the role of keeping the mass center of torso close to the longitudinal axis so that humans can maintain balance. Torsos with curvatures provide more than 10 times of strength and resilience compared with straight vertebral column. Human trunk motions are the result of collaborations between vertebral joints and muscle groups. Due to the flexibilities of these muscle groups, human trunk can withstand large loads. Typical movement patterns of human torso including rotation, flexion (or extension), and lateral bending are shown in Figure 1(b). 10 Motion degrees between adjacent vertebrae are relatively small, but the entire spine with 30 vertebrae in a series shows large workspace.

Human spine and typical movements of human body.
In Figure 2, the proposed new torso structure is illustrated in a 3-D model in SolidWorks environment and a prototype of 3-D printing is presented. The system consists of six revolute units marked as R1–R6 connected together in series. The six units are divided into two basic modules as shown in Figure 2(c) and (d). Internal components are substantially the same including harmonic reducer, motor, output flange sleeve, input flange cover, actuator, and encoder. The difference is the angle between output flange sleeve and input flange cover, which decides the location of rotation axes and subsequently decides motion results. The design concept begins with the serial mechanism, but it’s quite different from presented humanoid torsos. It is based on a general 6-DOFs mechanism with twist angles that are not equal to 0, π/2 or π and zero-length links with the inspirations of human bionics. It’s similar to human spine both in shape and functions, and we adopt rigid connection method instead of flexible artificial muscles for considerations of load capacity and controllability as discussed above.

(a) and (b): The proposed humanoid torso system; (c) to (e): components of the proposed torso structure: (1) harmonic reducer; (2) input flange cover; (3) disk type motor and encoder; (4) output flange sleeve; (5) motor driver.
The motion principle of this humanoid torso using disk type actuators is quite different from human spine’s skeleton–muscles motion methods. Independent motions of six units controlled by six actuators result in coupling motion types. Typical motion patterns can be achieved: Figure 3(a) shows the imitation of physiological curvature of the spine and Figure 3(b) and (c) shows the actions of lateral bending and flexion.

Typical motion patterns using humanoid torso.
Forward kinematics and workspace analysis
The configuration of the proposed humanoid torso, as shown in Figure 4, consists of six units. Four Denavit–Hartenberg (D–H) parameters associated with a particular convention for attaching reference frames to the proposed torso structure are also shown in Figure 4 and Table 1; the x-axis follows the y-axis and z-axis by choosing it to be a right-handed coordinate system.
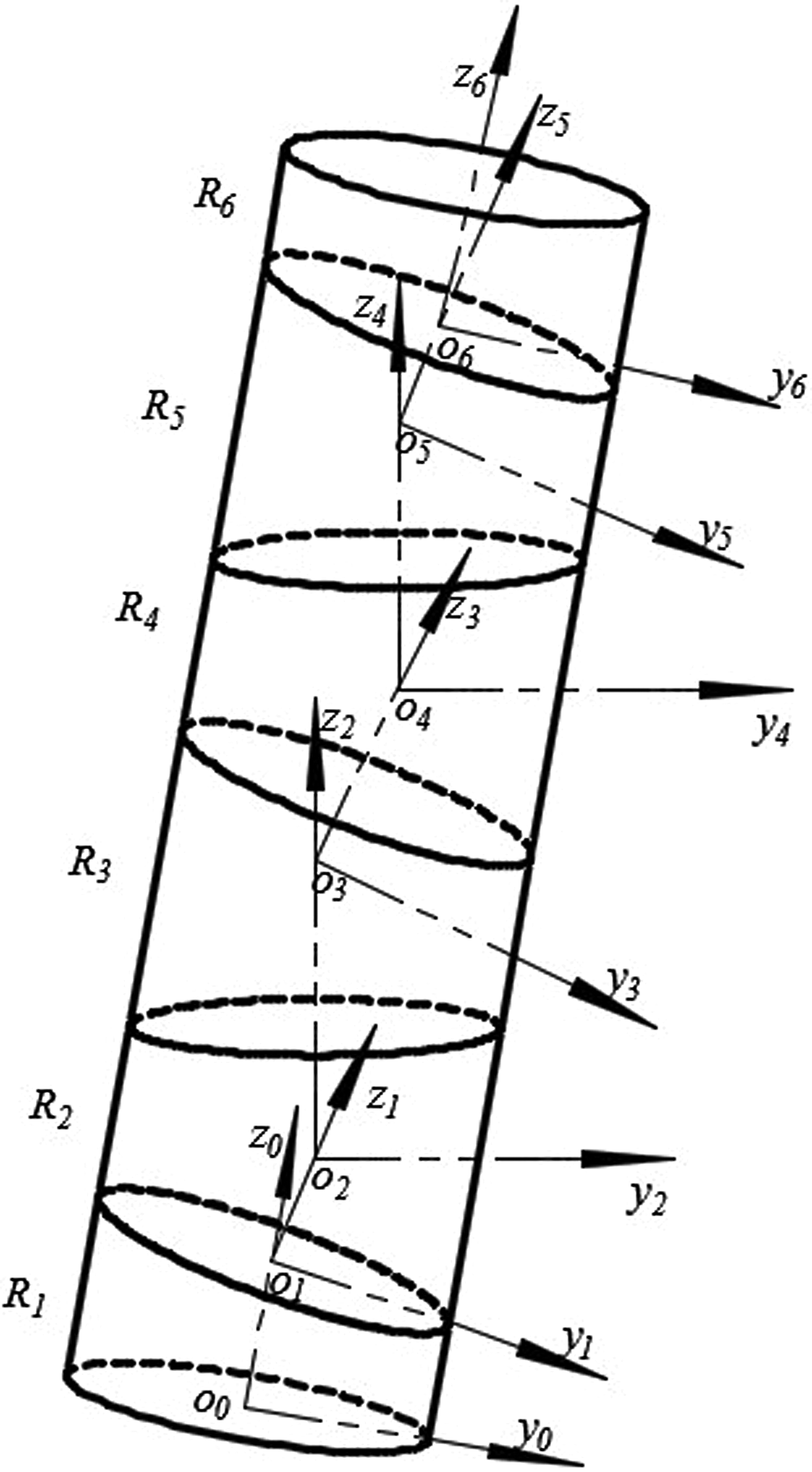
Configurations of the proposed humanoid torso with D–H system. D–H: Denavit–Hartenberg.
D–H parameters.

D–H: Denavit–Hartenberg.
The homogeneous transformation matrix is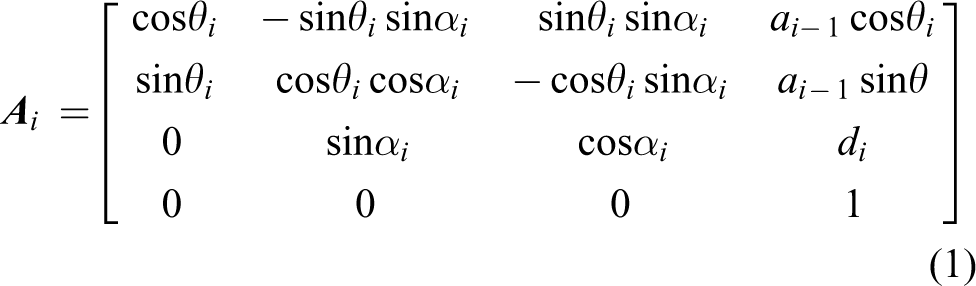
where θi is a joint angle at joint i,αi is a twist angle, ai is a link length, and di is an offset at joint i

where
However, it’s not clear whether the proposed new humanoid torso based on a special 6-DOFs mechanism could achieve continuous typical motion actions in Cartesian space. As shown in Figure 5, workspace of the proposed torso mechanism has been analyzed using Monte Carlo method
11,12
based on forward kinematics. Monte Carlo method has no limits to joint types and ranges of joint variables; it uses

Workspace analysis.

Flowchart of chaos-BFGS method; BFGS: Broyden-Fletcher-Goldfarb-Shanno.
Inverse kinematics
Typical inverse kinematic methods include analytical method and numerical method. Analytical method is quite superior when the mechanism satisfies the Piper criterion. Otherwise, this method becomes complex when it involves in general 6-DOFs serial manipulators in terms of producing extraneous roots and ill-conditioned matrices. So, numerical method becomes the only way to be considered due to the characteristic of the proposed torso structure. Numerical methods mainly include iterative methods and optimization-based methods, and they are consistent in some aspects. Typical iterative method based on Newton–Raphson algorithm is widely used to solve inverse kinematics for serial robots. However, it’s very sensitive to initial iteration values, which means that robots are easy to fall into the near-singular state and then lead to wrong values. 13
An optimization-based equation for inverse kinematics
In this article, optimization-based methods become the ideal way to be considered. Inverse kinematic is analyzed by the process of solving θ1 − θ6 with four known D–H symbols. The basic matrix equation can be transformed into the new form
14
–16

The new matrix reduces the analytical complexity of equation (2) because the joint angle θ6 is excluded in the third and fourth columns of both sides for the features of 
As the next step, substitution using the trigonometric relations is done to make a clear expression
since the values of third and fourth columns in equation (5) on both sides are not associated with θ6. Six equations extracted from the third and fourth columns in equation (4) can be obtained after multiplied by the transformations in equation (6)
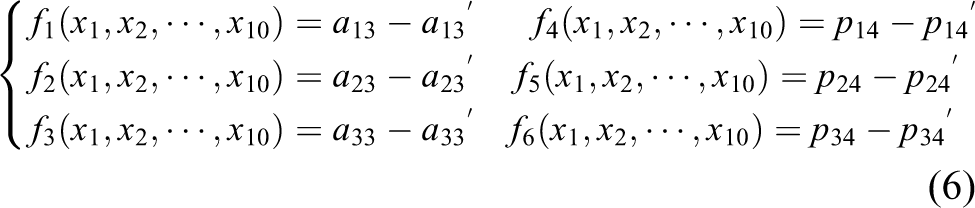
At this point, trigonometric relation 
The benefit of using trigonometric equation is that the range of the variables is restricted within (−1, 1) during the iteration procedure. It can guarantee to obtain meaningful solutions.
Consequently, the inverse kinematic solution of the proposed torso structure is equivalent to solve the minimum values of a master equation described as follows: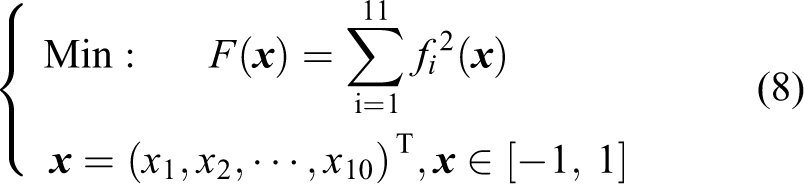
Hybrid numerical approach of Chaos-BFGS method
In this section, a hybrid method combing the large-scale regularity search capabilities of chaos optimization and high-speed convergence of quasi-Newton method has been proposed to solve inverse kinematics.
The BFGS algorithm
Newton’s method is one of the most widely used algorithms for optimization. The basic iterative formula is summarized below
where
Newton’s method has its own disadvantages such as sensibility to the initial iterative value, inability to ill-conditioned matrix, and time cost for Jacobian matrix. BFGS quasi-Newton method revised the disadvantages by using an approximation matrix


where
Quasi-Newton methods can achieve superlinear convergence if the initial iteration point is close to the solution. However, it’s not always effective in solving the minimum of multidimensional nonlinear equations for getting local extremum if the initial guess is not sufficiently close to the solution, or if singular points are encountered. 19 In other words, these methods are locally convergent and provide no guarantee for obtaining solutions. Some methods have been tried to overcome the disadvantages, but the extra benefits come with extra prices, 20,21 effects are not good.
Chaos optimization method
Chaos is a highly unstable motion of deterministic systems in finite phase space.
22
Logistic chaotic equations are used to generate chaotic variables for optimal searching
23

where μ is a control parameter and n = 0, 1, 2…. Suppose
Chaos-BFGS method
In combination with the advantages of two algorithms, theoretically, the hybrid approach of chaos-BFGS method can effectively avoid the local extremum traps when the BFGS method is used to calculate the extreme value of the high-dimensional sub-nonlinear equation. The main steps are summarized below:
Step 1: Set the solution error ε, run the chaos optimization algorithm to solve the systems of nonlinear equations described in equation (8).
Step 2: Make the current solutions
Step 3: If
In the chaos-BFGS method, chaos optimization algorithm is used to explore the solution space and locate the global initial solution of the system of nonlinear equation for the BFGS algorithm to avoid the local minimum. While the BFGS method is used to obtain the exact solution of the high-dimensional sub-nonlinear equation, the chaos-BFGS method includes the global search capabilities of the chaos optimization and the high local convergence rate of the BFGS quasi-Newton method, so the hybrid approach has excellent performance in theory compared to other methods.
Numerical examples and discussions
A 4 × 4 homogeneous matrix of the proposed torso structure’s pose derived from forward kinematics using an arbitrarily selected joint angles is as follows
At first, the chaos optimization is used to find the initial vector for the BFGS algorithm. Consider that

The logistic map chaotic generator spectrum of x1 − x10.
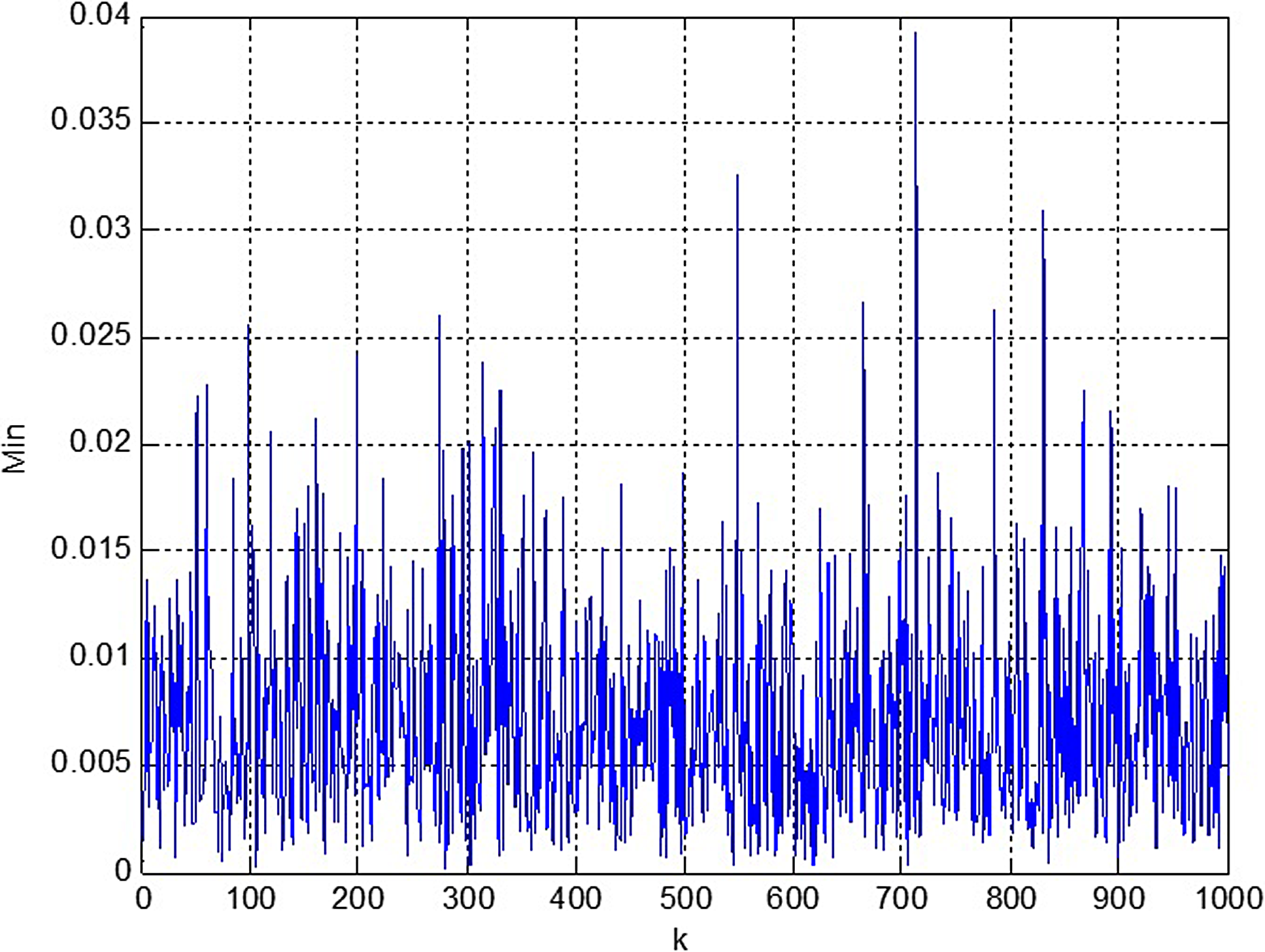
The logistic map chaotic generator spectrum of F(
It can be seen that the values of x1 − x10 effectively traversed the value range after the second carrier iteration. The initial point of the BFGS algorithm, which is the closest to the global optimal point, is obtained: [0.9994, 0.1547, 0.9350, 0.3262, 0.2020, 0.9576, 0.6368, 0.7712, 0.9666, 0.1772].
Take this point as the initial vector, the BFGS algorithm finds one of the exact solutions with 32 steps, as shown in Figure 9(a): [−0.1498, 0.0734, −0.1142, −0.0848, 0.0380, −0.4037, −0.0274, −0.1315, 0.0033, 0.0020]. The value of

Error of three iterative methods: (a) chaos-BFGS method; (b) BFGS method with an initial value [0,0,0,0,0,0,0,0,0,0]; (c) Jacobian method with an initial value [0,0,0,0,0,0] in MATLAB Robotics Toolbox; (d) rotational velocity ellipsoid of the numerical case.
In Figure 9(b), the BFGS method with an arbitrarily selected initial vector0,0,0,0,0,0,0,0,0,0 gets the solution
The concept of manipulability can be used to explain this problem. Consider the set of joint velocities with a unit norm
where 

where
Conclusions
The characteristics of the proposed bioinspired humanoid torso based on a general 6-DOF serial mechanism with twist angles that are not equal to 0, π/2 or π and zero-length links have been investigated. Forward kinematic based on D–H method and workspace analysis based on Monte Carlo method are implemented to demonstrate that continuous trajectory planning in Cartesian space to achieve typical movements is feasible, which means the new humanoid torso has the ability to achieve typical human postures. As the hybrid chaos-BFGS method has global search ability, the numerical simulations prove that chaos-BFGS method is more effective to solve inverse kinematics in terms of accuracy and speed compared with Newton-type methods under the circumstance that the nonlinear equation is non-smooth and sensitive to the value of initial guess caused by the structural characteristics. The proposed method also can be applied to inverse kinematics of general 6-DOFs serial robots, especially when there are many (near-)singular points caused by special structures. Experimental analyses are to be further investigated to show the feasibility of achieving typical postures by accelerating the construction of experimental platform.
Footnotes
Acknowledgements
The authors would like to thank Dr Hongbo Zhu for the valuable discussions with them.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (grant nos. 51405469, 61401437).