
Abstract
In the model tracking control of robot manipulator system, the treatment of nonlinear uncertainty in the system has always been an active research field. This article establishes a kinetic equation for robot manipulator system based on Lagrange equation and proposes a model tracking control system based on differential divisor. On this basis, this article proposes a model tracking control scheme for robot manipulator systems with disturbances. The proposed scheme is robust stable under the external disturbances. At last, the system simulation approach is employed to verify the effectiveness of this scheme on robot manipulator control.
Keywords
Introduction
Since extensive and in-depth researches have been studied on robots which are constantly launched in the fields of environment perception, motion control, positioning, and navigation, robots are increasingly applied in fields such as troubleshooting, metal cutting, welding, and paint spraying.1–6 In addition, the developments are also achieved in the fields of humanoid robots and rehabilitation robots.7–9 In recent years, lots of research findings have sprung up, which focus on the theory, algorithm, and application of tracking control. Tracking control of robotic systems is a difficult problem because the dynamics of these systems is highly nonlinear.10,11 Mariottini et al. 12 have developed a status-based predictive control method to track moving targets, thus achieving real-time motion tracking of soccer robot goalkeepers. Predictive control method provides an excellent enlightenment for obtaining more extensive control strategies in a dynamic uncertain environment, and the solution of various optimization-based problems, such as path planning and discrete event dynamic system monitoring, has gained extensive attention and study.
To realize the control of robots, the requirements on steady-state characteristic and transient characteristic must be satisfied. In fact, system errors might have occurred during system modeling when linear treatment is carried out in nonlinear cases, inducing system instability or deterioration owing to the response characteristic. The main factors of errors occurred during the design of system model, including system simplification, linearization of nonlinear systems, approximate time-independent variation of time-varying systems, order reduction of high-order elements, and parameter identification. Stability of an uncertain system is one of the essential considerations in system design, while robustness is exactly the property that bears system fluctuation and uncertainty. The system which maintains such property is called the robust control system.13–16
This research carries out tracking control over the uncertain system14,17–24 and takes the third power differential of link data as input signal. Thus, the difference between the output signals of the system is generated, and at the same time, the output signal of the reference model is converged to zero to complete the design of the robust control system. Without loss of generality, a three-link horizontal multi-joint robot manipulator is selected, and the transformation matrices of link coordinate system are obtained by Denavit–Hartenberg (D-H)25–28 method to establish the robust control system for the robot manipulator. In addition, the following researches are also conducted. According to the dynamic characteristics of kinetic parameters during the operation of the robot manipulator, conduct system modeling and research on robust control of robot manipulator via Jerk signal and based on tracking control theory, as well as demonstrate the internal stability of the system; discuss the influence on system output error of controlled object data change; design the control system targeting at the low sensitivity of controlled object; study the response characteristics of the robot manipulator of the controlled object with unknown parameters; conduct simulation research on the tracking performance of system output signal and reference system signal; and verify the effectiveness of the robust control research method applied in the research.
In this article, section “Design of the model tracking controller for robot manipulator system” provides the design of the model tracking controller for robot manipulator system. Section “Internal state bounded of the robot manipulator system with disturbances” investigates the internal state bounded of the robot manipulator system. Based on the model, section “Simulation results” provides numerical examples and demonstrates the effectiveness of this design method by means of simulation. The last section of this article is the “Conclusion,” which provides a summary of this research.
Design of the model tracking controller for robot manipulator system
Motion equation of robot manipulator
Taking into consideration the torque, weight, viscous friction coefficient, and external disturbance, the motion equation of n-freedom robot manipulator is generally expressed as follows 29

where

where

where

Design theory of model tracking control
This part discusses the general theory regarding the design of model tracking control system, thus preparing for the research on model tracking control of robot manipulator system with disturbances. The nonlinear control system is defined below



where
The reference model is defined as below, which is assumed to be controllable and observable 23


where

where

where

The control system is designed to obtain a control law which eliminates errors and keeps internal states bounded. Then, we have

where

where

Next, we calculate

Therefore

Since


Model tracking controller design of robot manipulator system with disturbances
Based on the model tracking control theory, this section discusses the design of a controller that takes into account the robot manipulator subject to external disturbance for low sensitivity of data change and analyzes the internal stability of the control system.
From equation (4), we obtain system control object and reference system model 31


The output error is

In equations (15) and (16),

where

So, model tracking controller of robot manipulator system with disturbances can be derived

Note that there are connections between the polynomial matrices and the system matrices



The followings must be satisfied 21



where


In this research, if

where

Substitute the specific set values and we have

Example 1
If
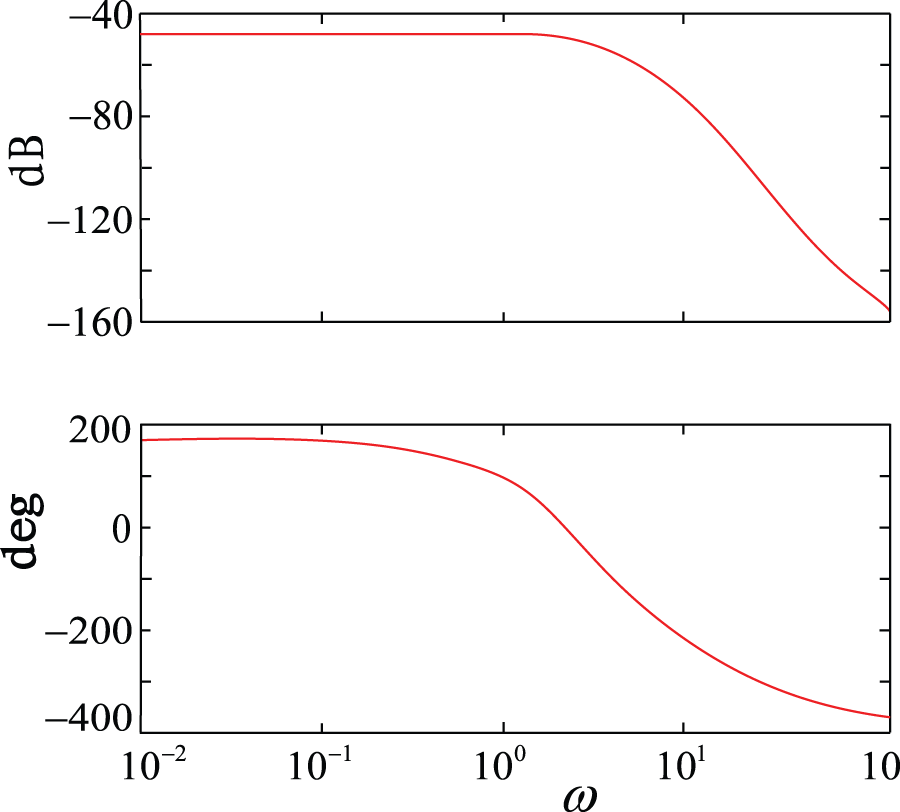
Bode diagram (frequency response of the function G(p)).
Internal state bounded of the robot manipulator system with disturbances
As a result of the increase in robots in various fields, the mechanical stability of specific robots has become an important subject of research. 30 In this section, we will pay attention on internal state bounded of the robot manipulator system as follows:
Let


where



We calculated characteristic polynomial
Hereafter 25

Consider a Lyapunov function, for symmetric positive definite matrices


We have

where

Let

Let

At this point,


Behavior of
Therefore, system is bounded.
Simulation results
This section conducts simulation via the three-freedom horizontal multi-joint robot manipulator. For the data of robot manipulator link, see Table 1. 22 We show a diagram of model tracking system for robot manipulator control system in Figure 3.
Link parameters for three-link manipulator.

Values in the brackets are change values of joints.

Diagram of tracking control system.
In Figure 3,
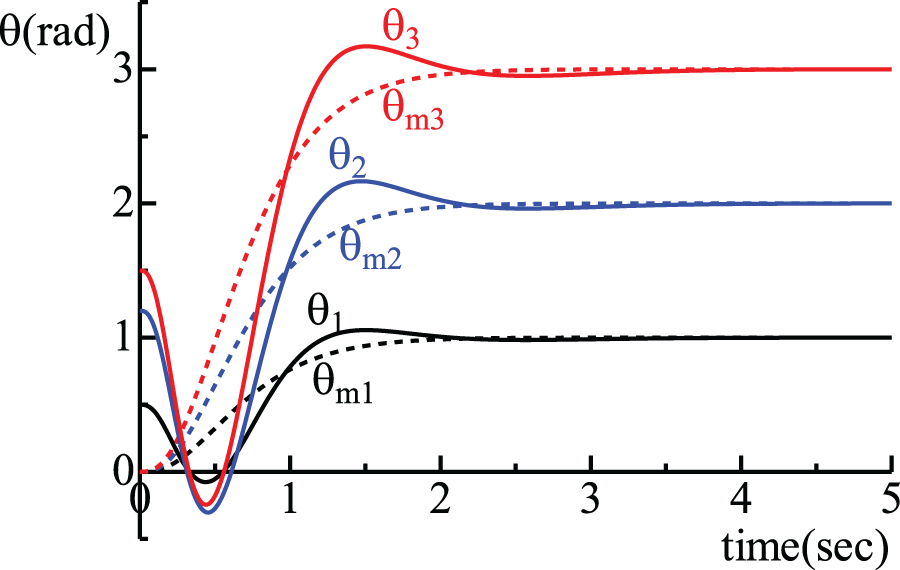
Response of link
In this example, the data of robot manipulator are set as follows:

Link 1: µ = 0.1.

Link 1: µ = 0.5.
Link 1: µ = 0.9.

Link 1: µ = 10.
Figures 4–7 indicate that the error value between the output signal of reference model and that of actual control system approaches zero. Within the unit time (
Simulation
Robot manipulator in operation may either run higher risk of being damaged due to its uncertain motion, motion range, and speed or suffer from lower working efficiency induced by programs’ failure to complete assigned motion due to different robot manipulators. This article completes the three-dimensional (3D) model of the three-freedom horizontal multi-joint robot manipulator, as shown in Figures 8–11.
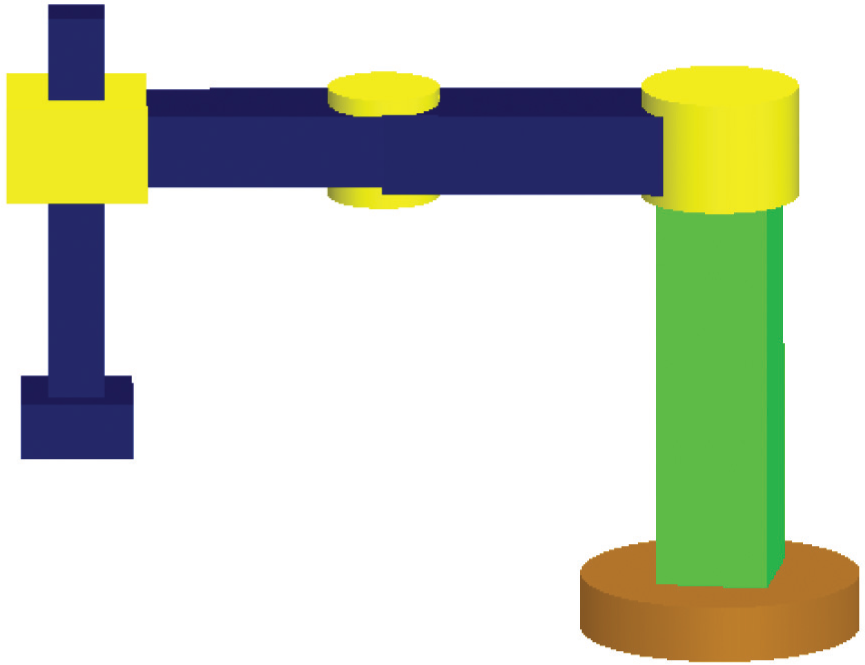
Location 1.

Location 2.

Location 3.

Location 4.
Conclusion
As the focal point in realizing industrial automation, the robot technology has attracted wide attention because of its extensive applicability and enormous development potential. This article discusses the construction of robot manipulator based on tracking control theory and derives the motion equation by the characteristics of the link, such as mass, mass center, inertia tensor, and friction. Assuming that there is an external disturbance, this article designed the control law for robot manipulator. This article reduces workload of design by introducing the differential divisor. Owing to the simplicity and applicability, the design theory proposed in this article ensures the stability of the system with its effectiveness that was certified by the simulation results.
Footnotes
Academic Editor: Zhijun Li
Declaration of conflicting interests
The authors declare that there is no conflict of interest.
Funding
This research received no specific grant from any funding agency in the public, commercial, or not-for-profit sectors.