
Abstract
This article considers finite-time trajectory tracking control problem for robotic manipulators with parameter uncertainties and external disturbances. A finite-time controller that achieves high precision and strong robustness is proposed without the requirement of the exact dynamic model. First, a novel finite-time model-assisted extended state observer is designed to compensate the system uncertainties with complex and uncertain dynamics. Then, a composite finite-time controller is developed for trajectory tracking control with the help of finite-time model-assisted extended state observer. Compared to the classic extended state observer, it is proved that the estimation error of finite-time model-assisted extended state observer can be stabilized in finite time. Meanwhile, the finite-time convergence of the closed-loop system with the proposed controller can also be proved through Lyapunov’s stability theory. A variable structure term is employed to compensate the estimation errors of finite-time model-assisted extended state observer. The validity of the control scheme is demonstrated by simulations and experiments.
Keywords
Introduction
With the rapid development and widespread exploitation of robotic manipulators, the requirements for high control performance are also increasing, including high precision, fast motion control and high anti-disturbance capability, and so on. However, how to deal with internal model uncertainty and the external disturbance has always been a large challenge in controller design for robotic manipulators. 1 The robotic systems suffer from highly complex nonlinear, strong coupled, and time-varying dynamic characteristics, such as parameter uncertainties, static and dynamic frictional forces, gear backlash, and so on. What is worse, varying loads are inevitable for grabbing tasks. Therefore, how to achieve high tracking performance and fast speed for robotic systems in the presence of complex uncertainties is still an open problem, which needs further study and improvement.
To deal with the complex uncertainties, many advanced control methods have been proposed for robotic manipulators, 2 such as sliding mode control, 3 adaptive control, 4 neural network control, 5 and fuzzy control. 6 However, most of these control schemes can only guarantee that the system states can be stabilized to equilibrium points asymptomatically when time goes to infinite. To achieve faster convergence rates and superior robustness, finite-time control methods were studied extensively. 7,8 Su and Swevers 9 replaced the linear errors in proportional–derivative control method with continuous exponential-like ones to achieve semiglobal finite-time tracking control. However, disturbance and uncertainty are not considered.
To enhance the capability of disturbance rejection, Zhao et al. 10 developed a robust controller by measuring the upper bounds of system uncertainty via a polynomial. Liu et al. 11 proposed a finite-time H ∞ controller for uncertain robotic manipulators. Liu and Zhang 12 proposed an adaptive neural network finite-time controller (FTC) for the trajectory tracking of uncertain robotic manipulators, which employed a radial basis function neural network to deal with the uncertainty of the robotic system. However, the algorithm is complex and thus results in a heavy computational burden and a long training time. Besides that, terminal sliding mode (TSM) control 13 was adopted to speed up convergence time and achieve high robust control of robotic manipulators. Golestani et al. 14 designed a fast TSM control method with a self-tuning algorithm to solve the finite-time tracking problem for systems subjected to unmatched uncertainties. To solve the potential singularity problem of well-known TSM controller, a continuous nonsingular TSM control algorithm was proposed by Yu et al. 15 It should be noted that the gains of TSM controllers are usually chosen to be larger than the upper bound of uncertainty. Large controller gains can guarantee satisfactory robustness but may lead to severe control chattering phenomenon and large initial control input. Mobayen et al. 16 designed a robust controller robotic manipulators, in which an adaptive tuning law is utilized to eliminate the requirement of the knowledge about the upper bounds of external disturbances.
An alternative approach to deal with disturbances and uncertainties is the so-called “observer-based technique,” 17 such as sliding mode observer (SMO)-based control, 18 disturbance observer-based control, 19 and extended state observer (ESO)-based control. 20 Recently, Sun et al. 21 utilized SMO approach to estimate the decoupled disturbances and full system states of nonlinear systems and got satisfactory control performance. Niu et al. 22 proposed a nonlinear disturbance observer-based sliding mode control for trajectory tracking of cable-driven rehabilitation robot. ESO proposed by Han 23 was specially designed to deal with the lumped uncertainty, including unknown system dynamics and the external disturbances. According to the analysis in the literature, 24 ESO is superior in dealing with dynamic uncertainties and disturbances than other observers. Different from traditional linear or nonlinear observers, ESO treats the lumped uncertainty as an additional state variable of the original system, then estimates it with the help of feedback function. Owing to the characteristics of satisfactory disturbance estimation, simple structure, and convenient implementation, ESO-based controllers are widely used in various practical mechatronic systems, such as robotic manipulators 25 and wheeled mobile robots. 26 For complex coupling system, classic ESO is employed to decouple the system by regarding the coupling term as a part of lumped uncertainty. Moreover, prior model knowledge can be incorporated into the ESO to lessen estimation burden and to reduce the latency in the disturbance estimation process. 27 Nevertheless, for most of the aforementioned observers, the observation errors can only converge to zeros or bounded sets with infinite settling time, which cannot achieve fast and exact disturbance compensation and fail to satisfy systems with real-time requirements.
In order to further improve the convergence rate of disturbance estimation, a growing body of literature investigated finite-time disturbance observers (FTDOs). Wang et al. 28 incorporated a novel FTDO into a continuous finite-time tracking control structure that facilitates attitude tracking under unknown external disturbances. More recently, Yang et al. 29 exploited a set of FTDOs to resist time-varying disturbances. Both FTDOs propose requirements for disturbance type. Another kind of finite-time nonlinear observer is terminal SMO (TSMO). Zhang et al. 30 proposed a novel adaptive TSMO to estimate unknown compound disturbances in finite time. Recently, literature of finite-time ESO (FTESO) have also grown up. Ming et al. 31 presented a finite-time linear ESO to realize the fast and accurate observation of disturbances. Zhao et al. 32 designed a generalized nonlinear ESO to guarantee the observation error bounded in finite time. Both FTESOs are designed for single-input single-output system and do not take advantage of known mathematical model. To the best knowledge of the authors, FTESO has not been proposed for complex coupled multi-input multi-output systems, such as robotic manipulators.
In this article, precise and rapid trajectory tracking control problem is addressed for robotic manipulators, which contain high nonlinearities, uncertainties, and disturbances. Motivated by discussions earlier, the desired design scheme should have a simple structure, finite-time convergence, strong robustness, small initial control input, and less computational burden. To deal with these problems simultaneously, we improved the FTC in literature 10 by introducing a novel finite-time model-assisted ESO (FTMESO), as shown in Figure 1. The FTMESO is designed combining a super-twisting algorithm to achieve finite-time convergence of lumped uncertainty. Different from classic ESO-based decoupling method in the previous literature, FTMESO designs a virtual input for each subsystem to achieve complete decoupling. No model information is discarded during decoupling progress. As far as we know, very little attention has been considered for FTESO design with the help of model information. The structure of FTMESO is first proposed in the existing literature. This study provides new insights into present research.

Block diagram of the proposed control scheme.
For simplicity, the proposed composited controller is referred as FTC–FTMESO. The main contribution points of this article are listed as follows.
A novel FTMESO is proposed to estimate the lumped uncertainty within a finite time. Dynamic model information and linear correction terms are added to improve the estimate performance. The structure of FTMESO is simple, which makes it feasible and practical in mechatronic applications.
A novel composite controller is designed by combining FTC and FTMESO. With the help of FTMESO, the proposed controller can not only guarantee the finite-time stability of the closed loop system, but also achieve prescribed tracking performance and high anti-disturbance capability. Moreover, since the system uncertainties and external disturbances can be almost entirely estimated and compensated, only small controller gains are needed to tackle the effects of lumped uncertainty estimation error instead of actual disturbance. In this way, a large initial control input can be avoided.
Both the finite-time convergence of FTMESO and finite-time stability of the closed loop system are proved via the Lyapunov’s stability theory.
The remainder of this article is organized as follows. The “Preliminaries and problem formulation” section reviews related lemmas about the finite-time stability of nonlinear systems and formulates the problem, where the dynamic model of a robotic manipulator is given. The “Design of FTMESO” section demonstrates the design of the novel FTMESO. In “Design of FTC” section, the FTC–FTMESO controller is proposed via the backstepping method, and the finite-time stability is proved. The performance of the proposed controller is verified by numerical simulations and experiments, and the results are given in the “Simulation and experiment” section. Finally, the “Conclusion” section concludes this article.
Preliminaries and problem formulation
Preliminaries
Several lemmas are reviewed to help the theoretical analysis in the following controller design.
Lemma 1
Consider a nonlinear system 33

where
There are real numbers

Then, the origin of the system (1) is a finite-time stable equilibrium. Furthermore, the setting time function T satisfies

for all x
0 in some open neighborhood of the origin. If
Lemma 2
For a nonlinear system (1). If

where x 0 is the initial value of x.
Lemma 3
Assume

Lemma 4
Suppose

For simplicity of expression, we define a notation

where
Problem formulation
For a robotic manipulator with external disturbances, the dynamic equation can be given as

where
In practice, the precise value of physical parameters cannot be obtained. The uncertainties resulting from parameter errors can be expressed as

where
Equation (8) can be rewritten as

where
Remark 1
From equation (8), it can be seen that the robotic manipulator is a high nonlinear, strong coupled multiple input multiple output system, and inevitably subjects to parameter variation, varying loads, external disturbances, and so on. Although it is impossible to obtain a precise dynamic model, it is feasible to obtain partial model knowledge. Hence, prior knowledge of the dynamic model should be utilized properly for model-based controller design rather than totally discarded, as presented in literature. 34,35

where

In this literature, the following assumptions are made regarding robot dynamics.
Assumption 1
The desired trajectory
Assumption 2
The derivative of fi
is bounded, that is,
Remark 2
Assumption 2 is widely employed in the design of ESO-based controllers, which is reasonable when the system stability is not affected by the lumped uncertainty. 36 The assumption happens in many control applications whose major dynamics are stabilized by feedback and the resulting lumped uncertainty is too weak to affect stability. 37 In this article, the lumped uncertainty is further weakened by the full use of dynamic model information.
The internal system uncertainties and external disturbances encountered in robot trajectory tracking control must be tackled to guarantee high performance. In this article, a novel FTMESO is established to estimate and compensate the lumped uncertainty.
Design of FTMESO
In this section, the FTMESO is designed to estimate the lumped uncertainty of system (10) with finite-time convergence, which performs as feedforward compensation in the following control design.
The lumped uncertainty f is regarded as an extended state
where
Let
where
An FTMESO for subsystem (14) can be designed as

where
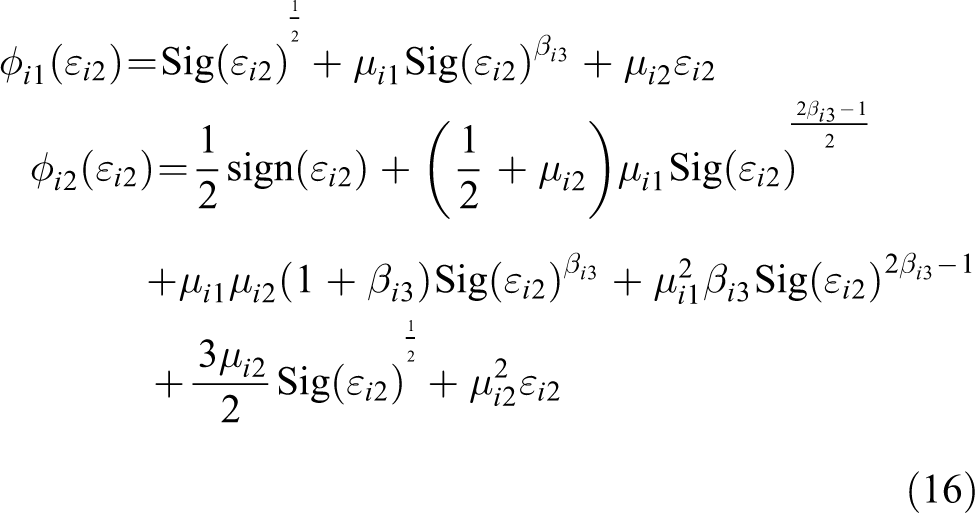
where
From equations (14) and (15), the observer estimation error dynamics can be obtained as

Next, the stability and finite-time convergence of the error system (17) will be proved. A Lyapunov function is proposed as

where

where
It can be inferred that

Define

Theorem 1
If a positive constant γ and a symmetric and positive definite matrix

where R = [4L
2 0; 0 0], then the observer estimation error would converge to the origin in finite-time

where
Proof
The derivate of equation (18) is obtained as follows

From equation (18), we have the following well-known inequality

where
Since it is easy to get

In the light of Lemma 2, the observer error system will converge to origin in a finite time given in equation (23).
However, it should be noted that in practical engineering, velocity measurements

where δ is a small positive constant.
Remark 3
Compared with the differentiator,
38
FTMESO has one more tunable parameter
Design of the FTC
In this section, using the estimated value in the observer as a feedforward term, an FTMESO-based FTC is proposed to achieve satisfactory control in the presence of system uncertainties and external disturbances. The stability of the proposed scheme is proved via the Lyapunov stability theory.
Define the tracking error as

In order to design the auxiliary control law, we define an auxiliary controller

where φ(0) = 0.
Substituting equation (29) into equation (28) yields

Next, we will design the control algorithm using the backstepping method.
Step 1
Design the virtual control term as follows

where
A candidate Lyapunov function for the first subsystem (30) is chosen as

The derivative of equation (32) is obtained as

Substituting equation (31) into equation (33) yields

where
If z is zero, then one can have

Considering Lemma 1, the first subsystem is global finite-time stable.
Step 2
Consider the Lyapunov function designed as follows

According to equations (30) and (34), the derivative of V 2 can be obtained as
Theorem 2
Suppose Assumptions 1and 2 hold. Consider the robot system (10). Design the composite control law as
where
Proof
Substituting equation (38) into equation (37) yields

where
Thus, according to Lemma 1, the closed-loop system is globally finite-time stable, the upper bound of setting time Tc can be estimated by

where
Furthermore, considering equations (23) and (40), the total convergence time of tracking error e can be obtained as

Remark 4
Remark 5
When

where
Remark 6
The proposed controller needs the measurements of position and velocity. However, in most practical applications, only position can be obtained from an encoder. To make the proposed controller more widely used, a tracking differentiator (TD) 23 is introduced to effectively estimate velocity. TD is given as follows

z 1 can be sufficiently close to x 1 by suitable choosing parameter r, then z 2 can be regarded as a approximated differential of x 1. In other words, TD can achieve

A rigorous proof of the convergence of TD is given by Guo and Zhao. 40 Some experiment results will also be presented to show the effectiveness of TD.
Simulation and experiment
Simulation results
To validate the effectiveness of the proposed control method for trajectory tracking, as shown in Figure 2, a two-link plane elbow manipulator 41 is numerically simulated with the FTMESO in equation (15) and the composite controller in equation (38). The dynamic equation of robot manipulator is given as

where
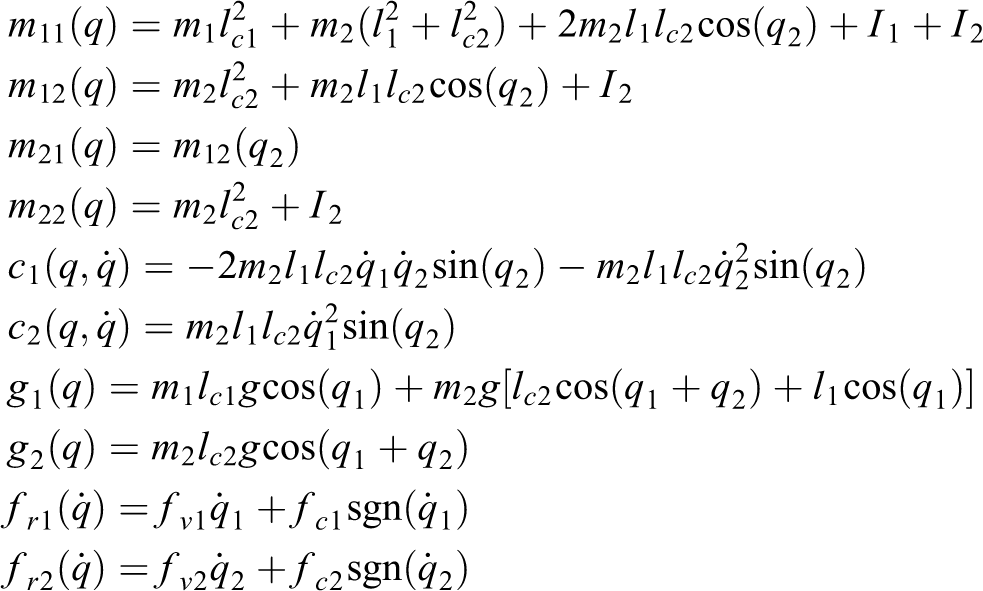
where

Two-link planar elbow manipulator.
Physical parameters of the two-link robotic manipulator.

The control objective aims to design a controller to enable the angles of the joints to track desired reference trajectories well while time extends infinitely. The trajectories are selected as follows:
To show the superiority of the proposed scheme, a continuous TSM controller (CTSMC), 15 active disturbance rejection control (ADRC), 42 and conventional computed torque control (CTC) are implemented along with the proposed FTC–FTMESO method for comparison. All controllers are designed with nominal parameters instead of actual parameters, and the controller gains are chosen by trial-and-error until a satisfactory tracking performance is achieved. Detailed simulation parameters for the proposed FTC–FTMESO method are listed in Table 2. The parameters for CTSMC, ADRC, and CTC are listed in Table 3.
Simulation parameters for FTC–FTMESO method.

FTC: finite-time controller; FTMESO: finite-time model-assisted extended state observer.
Simulation parameters for compared controllers.

CTSMC: continuous terminal sliding mode controller; ADRC: active disturbance rejection control; CTC: computed torque control.
To further verify the robustness of controllers against varying loads, it is assumed that the robotic manipulator suddenly picks up a heavy load at
To evaluate the performance of the four controllers and make a quantitative comparison, we employ two performance indices as follows.
Integral of the time multiplied by the absolute value of the error (ITAE)

Integral of the square value (ISV) of the control input

ITAE is an error criterion to evaluate the entire error track tracking performance, where T r is the total running time. ITAE penalizes errors that last for a long time because time is an important factor in it. ISV represents energy consumption.
The trajectory tracking simulation results and corresponding analysis are as follows.
Figure 3 shows the tracking errors under three controllers. As we can see, the tracking errors converge to a neighborhood around zero quickly. When a large load is added at

Position tracking errors under different controllers.
Figure 4 displays the corresponding control input torques. Generally speaking, larger controller gains can lead to faster transient response and stronger robustness against uncertainties, which may also result in larger initial control torque and energy consumption. In the proposed composite scheme, the vast majority of internal system uncertainties, external disturbance, and varying loads can be accurately estimated and compensated by FTMESO. Therefore, the proposed controller can achieve strong anti-disturbance capability with relatively smaller control gains and avoid giving rise to large initial control torque, as we can see in Figure 4. Moreover, the energy consumption of FTC–FTMESO is also much less than others, especially during the initial transient phase, which can be concluded from Figure 4 and Table 4.
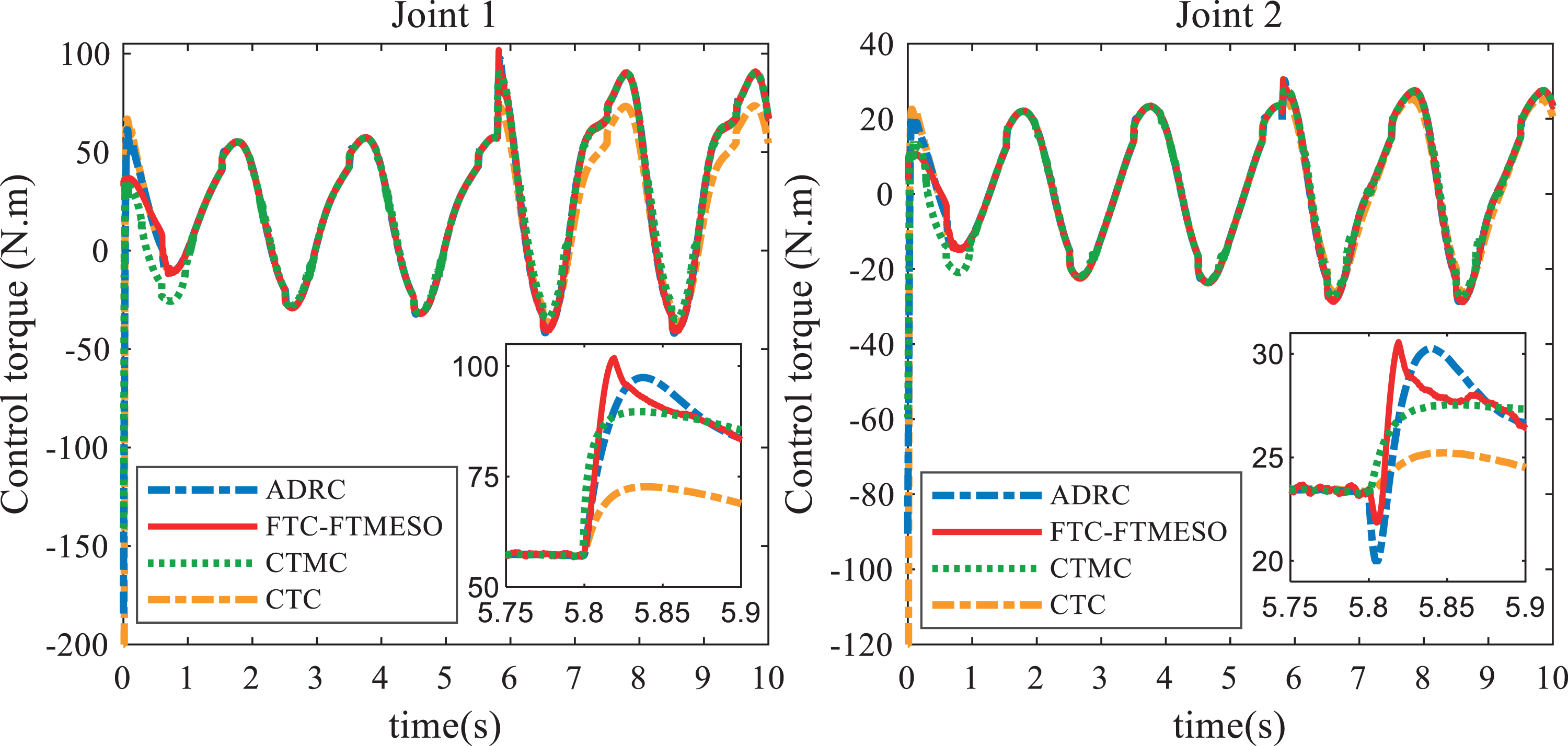
Control torques under different controllers.
Performance indices of different controllers.
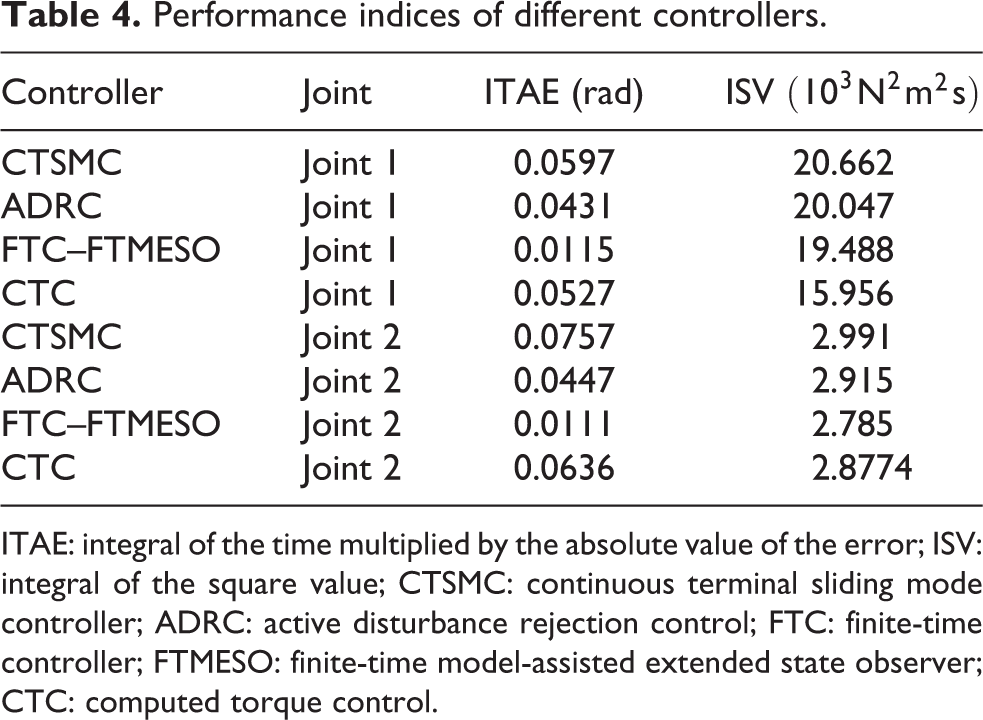
ITAE: integral of the time multiplied by the absolute value of the error; ISV: integral of the square value; CTSMC: continuous terminal sliding mode controller; ADRC: active disturbance rejection control; FTC: finite-time controller; FTMESO: finite-time model-assisted extended state observer; CTC: computed torque control.
Figure 5 exhibits the estimation errors of FTMESO and linear ESO. As we can see, the time consumed in estimating and compensating for the sudden disturbance is longer in the ESO than in the FTMESO. In fact, ESO can be regarded as a special instance of the FTMESO when

Lumped uncertainty estimation error of FTMESO and ESO. FTMESO: finite-time model-assisted extended state observer; ESO: extended state observer.
The performance indices obtained from simulations are shown in Table 4. Obviously, the robotic system under the proposed composite controller has better control accuracy, faster response speed, and less energy consumption than CTSMC and ADRC method.
Experiment results
To further prove the validity of the proposed controller, experiments are conducted using joint 2 and joint 3 of the STEP SA1400 industrial manipulator, where alternating current servo motors are used to transmit power through harmonic drives. The rated torques are 6.4 and 2.39 N·m, and gear reduction ratios are 125:1 and 115:1 for joints 1 and 2, respectively. Other joints are locked in the experiments. The manipulator is equipped with encoders to obtain joint positions. Although the manipulator has no tachometers, its servo drivers can provide estimate of joint velocities via its internal algorithm. Considering many servo drivers without this featureless, we introduce TD as an alternative to make the proposed controller be applied to more applications. An aluminum frame with a strong magnet, which is used to attract a load, is added to the end of the manipulator.
We used a PC-based control system developed by our team with Core (TM) i7-6700HQ 2.6-GHz CPU, 8.00-GB SDRAM and Windows 7 operating system (OS). The proposed controller is written in C++ under Windows OS with Kithara real-time suite (KRTS). The KRTS is a modular real-time extension software for Windows OS and can improve the real-time performance of control system. The control system uses EtherCAT to transfer data between the controller and servo drivers. The control cycle is 1 ms. The layout of the experimental system is shown in Figure 6.

Layout of the experimental system.
To reduce the chattering caused by signum function
It can be seen from simulation results that the proposed FTC–FTMESO and ADRC are two better controllers than others. To demonstrate the advantages of the proposed controller, ADRC is also tested for comparison in experiments. Since the robot manipulator is not equipped with tachometers, TD is employed to estimate velocity. Detailed experiment parameters for FTC–FTMESO, ADRC, and TD are listed in Table 5.
Experiment parameters for FTC–FTMESO, ADRC, and TD.

FTC: finite-time controller; FTMESO: finite-time model-assisted extended state observer; ADRC: active disturbance rejection control; TD: tracking differentiator.
The desired trajectory is
The velocity estimation using TD and servo driver is shown in Figure 7. From this figure, it can be seen that the TD gives a satisfactory performance referring to the velocity estimation of servo driver. The tracking errors and control inputs of the proposed controller and ADRC are shown in Figures 8 and 9, respectively. To justify the performance against external disturbances, a load weighing 4 kg is manually added to the end of the manipulator at about t = 6 s.

Velocity estimation of servo driver and TD. TD: tracking differentiator.
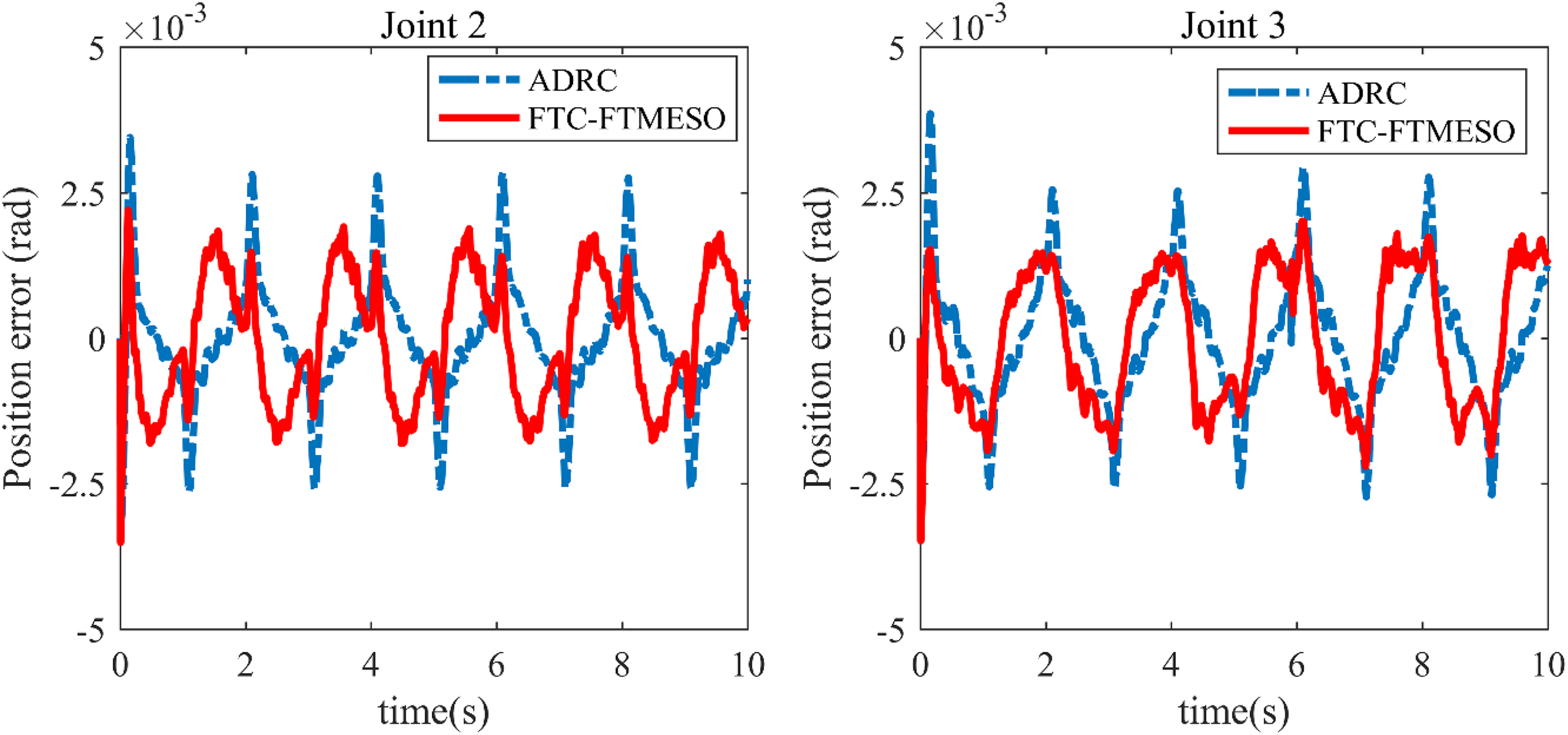
Position tracking errors of the experimental robot.

Control torques of the experimental robot.
The experimental results illustrate that the tracking error of the FTC–FTMESO is less than 0.0025 rad, and that of ADRC is less than 0.004 rad. Besides, it is easily seen that the proposed controller has faster response and stronger robustness than the ADRC when load is added. Figure 10 illustrates the lumped uncertainty estimations. The lumped uncertainty of FTMESO is much less than that of ESO because of the utilization of dynamic model information.

Lumped uncertainty estimation of FTMESO and ESO for the experiment robot. FTMESO: finite-time model-assisted extended state observer; ESO: extended state observer.
Comparative experimental studies verify that no matter in the presence or absence of the external disturbance, the proposed controller has better trajectory tracking performance and superior robustness than conventional ADRC.
Conclusion
In this article, we investigated the precise and fast trajectory tracking control problem for robotic systems subject to internal model uncertainty, external disturbance, and varying loads. A novel composite controller is designed by introducing an FTMESO into an FTC. The FTMESO was utilized to estimate and reject the lumped uncertainty accurately in finite time. Moreover, the robotic system under the proposed method can achieve satisfactory performances such as high accuracy, rapid convergence, robustness against uncertainties, and so on. An important feature is that performance can be maintained in the presence of disturbances and varying loads. Meanwhile, the finite-time convergence of the closed-loop system was also proved through theoretical analysis. The effectiveness of the proposed controller was demonstrated by simulations and experiments.
The controller is simple in structure and easy to implement in other uncertain dynamic systems such as motor and aircraft. Our future work is to design the controller that tracks the trajectories given in task space.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Special Foundation for National Integrated Standardization and New Model of Intelligent Manufacturing, China (Grant No. Z135060009002-132) and the National Natural Science Foundation of China (Grant No. 51875323).