
Abstract
This study presents a hybrid calibration and model-free error compensation framework to enhance the positioning accuracy of a 5R1P (R: revolute, P: prismatic) spherical parallel manipulator. Calibrating such mechanisms is challenging due to the analytical intractability of their inverse kinematics. To address this, a forward-kinematics-only approach is developed that eliminates reliance on inverse models while preserving high precision. The method integrates geometric calibration based on Denavit–Hartenberg (D-H) modeling with a two-stage optimization combining Particle Swarm Optimization (PSO) and Levenberg–Marquardt (LM) refinement. To correct residual errors, a Positioning Error Compensation Method (PECM) is introduced, which iteratively updates joint commands using a numerically estimated Jacobian. The PECM operates in two modes: one utilizing direct end-effector measurements and another employing an Adaptive Neuro-Fuzzy Inference System (ANFIS) to predict positioning errors. Experimental validation on a 5R1P prototype demonstrates a 97% reduction in Cartesian error using measured feedback and a 73% reduction using ANFIS-based predictions. The proposed framework provides a generalizable, inverse-kinematics-free solution suitable for real-time implementation in robotic systems requiring compactness, accuracy, and reliability.
Keywords
Introduction
Spherical parallel manipulators (SPMs) have gained considerable attention in recent years due to their compact structure, high stiffness-to-weight ratio, and ability to perform precise rotational motion around a fixed center. These characteristics make them particularly suitable for applications in minimally invasive surgery, 1 camera orientation, 2 and satellite tracking systems. 3 Among the various SPM configurations, the 5R1P Spherical Parallel Mechanism (5R1P-SPM) or RRRRRP-SPM (R: passive revolute joint, R: active revolute joint, P: active prismatic joint) architecture provides a practical balance between mechanical simplicity and kinematic dexterity, making it a compelling candidate for tasks requiring accurate and responsive orientation control.
Despite their advantages, SPMs—like most parallel manipulators—suffer from reduced positioning accuracy due to geometric imperfections, joint misalignments, and structural deformations.4,5 Traditional kinematic modeling assumes rigid links and ideal joints, but real-world deviations introduce significant errors in the forward kinematic estimation. These inaccuracies are compounded in parallel architectures, where the coupled nature of joint movements amplifies the effects of small parameter deviations. 6
Geometric calibration is a critical step toward improving positioning accuracy. Various methods have been proposed to identify the manipulator’s geometric parameters, such as Denavit–Hartenberg (D-H) parameters or transformation matrices.7,8 Optimization-based approaches are commonly used to align the kinematic model with actual measurements. However, most of these rely on inverse kinematic computations, which may not be analytically tractable for high-degree-of-freedom (DOF) or redundant systems. 9 Additionally, inverse kinematics often suffer from singularities and numerical instability, making them unsuitable for general-purpose compensation schemes. 10
To overcome these limitations, we present a novel framework that combines geometric calibration with a model-free error compensation strategy, both of which rely exclusively on forward kinematics. The calibration stage is formulated as a parameter identification problem, where D-H parameters are refined using a hybrid optimization algorithm that integrates Particle Swarm Optimization (PSO) and the Levenberg–Marquardt (LM) algorithm.11,12 This hybrid method ensures global exploration while maintaining fast local convergence, providing a robust calibration result.
Following geometric calibration, a Positioning Error Compensation Method (PECM) is introduced to handle residual errors that arise from non-geometric sources such as compliance, thermal drift, or actuator backlash. PECM computes joint corrections using a numerically estimated Jacobian derived from the forward model, thereby avoiding any reliance on inverse kinematics. The method supports two operational modes: one uses real-time measurements obtained from a motion capture system, while the other relies on a predicted error vector generated by an Adaptive Neuro-Fuzzy Inference System (ANFIS).13,14 This flexibility allows the method to operate in environments where external measurement is not feasible, making it practical for embedded and real-time applications.
Previous studies 15 on spherical parallel manipulators have primarily relied on idealized models or inverse-kinematic calibration approaches, which are sensitive to singularities and non-convex optimization landscapes. The proposed framework differs by addressing these limitations through a purely forward-kinematics domain formulation, enabling model refinement and compensation without requiring closed-form inverse models.
The contributions of this work are as follows:
A hybrid calibration framework is developed that refines the D-H parameters of a 5R1P spherical parallel manipulator using a PSO–LM approach.
A forward-kinematics-only error compensation method (PECM) is proposed, capable of correcting residual positioning errors without using inverse kinematic models.
The compensation method is validated in both measurement-based and prediction-based modes, demonstrating over 97% and 73% positioning error reduction, respectively.
This paper is organized as follows. Section “Geometric modeling and calibration strategy” describes the geometric calibration strategy and kinematic modeling approach. Section “Model-free position error compensation using forward kinematics” introduces the PECM framework, including Jacobian estimation and its two operational modes. Section “Experimental setup and results” presents the experimental setup and results. Section “Discussion and conclusion” concludes the paper with a discussion of findings and future directions.
Geometric modeling and calibration strategy
This section outlines the geometric modeling assumptions and calibration methodology used to improve the positioning accuracy of the 5R1P-SPM. As a spherical mechanism, it may position its end effector around a Remote Center of Motion (RCM). The platform serves as the confluence of these two arms. The end effector is positioned on a prismatic joint, advancing toward the sphere’s center. In analogy to a 5-bar spherical mechanism, one connection is designated as the base, while the remaining linkages are regarded as two arms, each comprising two spherical linkages and one shared linear linkage. Its structural layout, CAD design, and prototype implementation are shown in Figure 1, which includes (a) the mechanical design, (b) a 3D-printed prototype, (c) a kinematic sketch, and (d) a view along the

Mechanical architecture of the 5R1P spherical parallel manipulator: (a) CAD model, (b) 3D-printed PLA prototype, (c) schematic of the mechanism showing the joint and link notation and (d) view along the y0-axis.
Figure 1 illustrates the two arms designated as the left and right arms. Their joints are designated as A1 and B1 for the left arm, and A2 and B2 for the right arm. The joint P is common to two arms, and point E, situated on a translational link, is regarded as the end effector. The length of segment PE is adjustable and constitutes the model’s third degree of freedom. The joints A1 and A2 are engaged, whereas B1, B2, and P are inactive. The point O denotes the position of the RCM. The axes zA1, zA2, zB1, zB2, and zE, which sequentially pass through points A1, A2, B1, B2, and E, cross at point O. The joint axes zA1 and zA2 each oriented 30° from the horizontal. The robot’s global coordinate system O0xoyozo is positioned at the sphere’s base, as seen in Figure 1(d).
Essomba and Nguyen Vu
16
and Lahdiri et al.
17
presented forward and inverse kinematics models for spherical parallel robots grounded in spherical geometry. This method is exclusively applicable for theoretical computations, assuming perfectly precise robot structures. To facilitate mathematical modeling, the manipulator is assumed to be composed of rigid links connected via ideal revolute joints. Under these conditions, each kinematic limb is modeled using the Denavit–Hartenberg (D-H) convention, which defines the relationship between consecutive coordinate frames through four parameters: joint angle
These parameters uniquely determine the homogeneous transformation between successive frames. Since the expression for the D-H transformation matrix is standard and available in robotics literature,9,10 it is omitted here for brevity. The reference frame for modeling is chosen such that the spherical center of the manipulator coincides with the origin. All joint variables are referenced relative to their zero-position orientations, and forward kinematics are computed through serial composition of transformations within each limb.
The nominal D-H parameters are extracted from the CAD design and listed in Table 1 where
Nominal and identified Denavit–Hartenberg (D-H) parameters of the 5R1P spherical parallel manipulator obtained through hybrid PSO–LM calibration.

Forward kinematic modeling with D-H parameters
Given the D-H structure, the position and orientation of the moving platform can be predicted from the joint variables by applying forward kinematics. However, modeling errors caused by fabrication tolerances, joint axis misalignments, and link deflections lead to systematic deviations between the predicted and actual end-effector poses.4,5 These discrepancies necessitate calibration.
Calibration as a parameter identification problem
The calibration procedure aims to identify the actual D-H parameters that minimize the discrepancy between the model predictions and sensor measurements. Let
The cost function for optimization is formulated as:

Here,
Due to the nonlinear and multi-modal nature of this optimization problem, a hybrid method combining Particle Swarm Optimization (PSO) and the Levenberg–Marquardt (LM) algorithm is employed. PSO is used for global exploration to avoid local minima, while LM provides rapid convergence to a local optimum once a promising region is identified. This hybrid approach has been successfully applied in other robotic calibration tasks.18,19 The scheme of geometric calibration is shown in Figure 2.

Flowchart of the hybrid geometric calibration procedure using particle swarm optimization (PSO) followed by Levenberg–Marquardt (LM) refinement.
The optimization is performed using a dataset of measured poses collected via an optical tracking system. The number of parameters to be calibrated is determined by the number of D-H parameters per joint, and the optimization runs over all collected data samples. The improvement in accuracy before and after calibration is quantitatively reported in Section “Experimental setup and results.”
Model-free position error compensation using forward kinematics
While geometric calibration significantly reduces systematic errors arising from inaccurately estimated Denavit–Hartenberg parameters, residual positioning deviations still persist. These deviations often stem from unmodeled physical phenomena such as joint backlash, elastic deformation, gear transmission irregularities, and servo drift. Since these effects are difficult to represent using deterministic kinematic models, a model-free Positioning Error Compensation Method (PECM) is proposed, leveraging only forward kinematics to iteratively minimize residual error. This design eliminates the reliance on inverse kinematics, which may be ill-posed or analytically intractable for high-degree-of-freedom systems.6,8
Problem formulation
Let the current joint command vector be denoted as

To minimize this error, the method iteratively updates the joint command using a correction vector

Here,

where
Equation (4) follows the standard numerical Jacobian formulation as described by Craig 9 adapted here for forward-kinematics-based estimation.
The joint command is then iteratively updated according to:

where
Measured and predicted compensation modes
The PECM framework supports two distinct modes of operation:
Measured-error mode: Real-time Cartesian feedback from an external optical tracking system (e.g. Polaris Vicra) is used to compute the current error
Predicted-error mode: A machine learning model is trained to estimate
In both cases, the predicted or measured Cartesian error is transformed into joint-space corrections using the PECM algorithm. The correction process is illustrated in Figure 3.

Block diagrams of the positioning error compensation method (PECM): (a) measured-error mode using optical-tracking feedback and (b) predicted-error mode using the trained ANFIS model.
Convergence and termination criteria
The PECM iterations proceed until the norm of the Cartesian error

Typically, convergence is reached within 10–15 iterations when a small
Experimental setup and results
To validate the proposed calibration and model-free compensation framework, a prototype of the 5R1P spherical parallel manipulator was fabricated and tested in a controlled laboratory environment. The experiments were designed to evaluate both the geometric calibration using the PSO–LM method and the Positioning Error Compensation Method (PECM) under measured and predicted error modes.
Hardware configuration and measurement system
The links of the manipulator prototype were fabricated using a 3D printer with polylactic acid (PLA) material. The parallel mechanism is actuated by three high-resolution servomotors. Although the structure exhibits notable flexibility, it also provides high repeatability, making it well-suited for evaluating the effectiveness of the proposed calibration and compensation approach. The overall mechanical structure, control electronics, and experimental setup are illustrated in Figure 4. The system is controlled by a Teensy 4.0 microcontroller, which communicates with MATLAB via a USB serial interface. Each servomotor is equipped with a rotary encoder for closed-loop position feedback.

Experimental calibration and positioning-accuracy verification setup showing the 5R1P prototype, control electronics, and Polaris Vicra optical-tracking system.
The ground-truth Cartesian pose of the end-effector was measured using a Polaris Vicra optical tracking system (Northern Digital Inc.), which provides a positional accuracy of ≤0.25 mm RMS and angular accuracy of ≤0.1° RMS. The system features repeatability better than 0.05 mm for position and 0.03° for orientation, operating at a tracking frequency of up to 60 Hz within a measurement volume of approximately 1.5 m¹.
Two optical tracking tools are employed in the real-time measurement procedure using the Polaris Vicra optical tracking system. A passive tool, referred to as Tool 1, is mounted on the robot base, and its associated coordinate system, denoted as frame
The measured data for Tool 1 includes a position vector of its origin,
A total of 905 random joint configurations
Calibration results
The proposed hybrid calibration method begins with global optimization using Particle Swarm Optimization (PSO) followed by fine-tuning via the Levenberg–Marquardt (LM) method. The PSO employed 100 particles across 300 generations. The convergence profile of the cost function is presented in Figures 5 and 6.

Convergence of the particle swarm optimization (PSO) algorithm for the left-hand and right-hand limbs during geometric calibration.

Convergence curves of the Levenberg–Marquardt (LM) refinement for the left limb, right limb, and combined dual-arm configuration.
Table 1 outlines the nominal and identified geometric parameters following geometric calibration. Calibration performance is summarized in Table 2, demonstrating a significant reduction in end-effector errors. The mean position error decreased from 16.36 to 1.39 mm, and the mean orientation error from 0.0935 to 0.0263. These results verify the effectiveness of the hybrid optimization in refining the D-H parameters. The initial 16.36 mm mean positioning error arises primarily from the 3D-printed PLA structure and servo-driven spherical joints, which introduce assembly misalignments and flexibility. The prototype was designed for proof-of-concept validation rather than precision machining.
Comparison of mean end-effector pose errors before and after hybrid geometric calibration.

PECM evaluation
To evaluate the PECM approach, 20 new configurations not used during calibration or training were selected for validation, which lies on a circle, as shown in Figure 7. The maximum number of iterations of the ILC process
In measured-error mode, the real-time optical tracking data was used to compute the residual Cartesian error.
In predicted-error mode, the trained ANFIS model estimated

Validation trajectory composed of 20 equally spaced points along a circular path on the spherical workspace.
PECM based on measured positions
The endpoints position and the errors over runtimes is shown in Figures 8 and 9 respectively. After 9 iterations, the position error

Endpoint trajectories over iterative runs: blue = desired positions; red = actual measured positions using the PECM in measured-error mode.

Cartesian position error versus iteration number during PECM compensation.
To enable a direct comparison with the findings reported in the previous study, 15 two Jacobian formulations were evaluated in measured-error mode: one derived from forward kinematics (FK) and the other from inverse kinematics (IK). As shown in Figure 10, the endpoint trajectories obtained over multiple runtimes demonstrate that the FK-based Jacobian achieves significantly tighter tracking performance, with the actual trajectory (red) closely following the desired trajectory (blue). In contrast, the IK-based Jacobian produces larger offsets and less uniform compensation, particularly in regions of higher curvature. These results indicate that the FK-based formulation provides more stable and predictable convergence under iterative learning control (ILC) for the redundant spherical parallel robot.

Comparison of endpoint trajectories using Jacobians derived from: (a) forward kinematics and (b) inverse kinematics. Our forward-kinematics-based Jacobian shows tighter tracking and faster convergence.
The superior performance of the FK-based Jacobian can be attributed to the structural characteristics of redundant spherical parallel mechanisms. The closed-loop geometry of such robots renders the forward kinematic Jacobian analytically well-conditioned, thereby avoiding the numerical inversion errors and branch-selection ambiguities that are often encountered in IK-based formulations. While previous studies have demonstrated that IK-based Jacobians can be enhanced through advanced compensation strategies such as Position Error Compensation Models (PECM), the unaugmented IK approach remains more sensitive to configuration-dependent errors and solver instability. By contrast, the FK-based Jacobian directly captures the differential mapping between joint space and task space, resulting in more robust compensation and improved trajectory tracking in redundant parallel mechanisms.
PECM based on predicted positions
The Adaptive Neuro-Fuzzy Inference System (ANFIS) employed in this study consists of three independent Sugeno-type models, each dedicated to predicting one Cartesian error component along the X, Y, and Z axes. The network is designed with six input variables: three motor command signals and three corresponding designed Cartesian positions. These inputs are processed through a grid-partitioning scheme to construct the fuzzy inference system. For each input, three generalized bell-shaped membership functions (gbellmf) are defined, resulting in a total of
The overall architecture is organized into three parallel branches, where each branch independently outputs one Cartesian error component
Through this configuration, the ANFIS framework effectively captures the nonlinear mapping between motor commands, designed positions, and the resulting Cartesian errors, providing accurate predictions that can be used for compensation in the Positioning Error Compensation Method (PECM). Figure 11 illustrates the training curve.

Training curve of the ANFIS model showing reduction of the root-mean-square error (RMSE) over epochs.
Upon completion of ANFIS training, the network is employed to forecast positional errors for the ILC process. The simulation results indicate that the ILC process converges, with the projected endpoints aligning with the designed endpoints, as shown in Figure 12. The conclusive commands are transmitted to the robot. Figure 12 illustrates that the robot’s actual performance exhibits discrepancies, arising from the divergence between projected errors and actual errors. The discrepancies at the locations are illustrated in Figure 13. Following the circular trajectory on the sphere.

Predicted-error-mode PECM results: endpoint trajectories after compensation using ANFIS-predicted Cartesian errors.
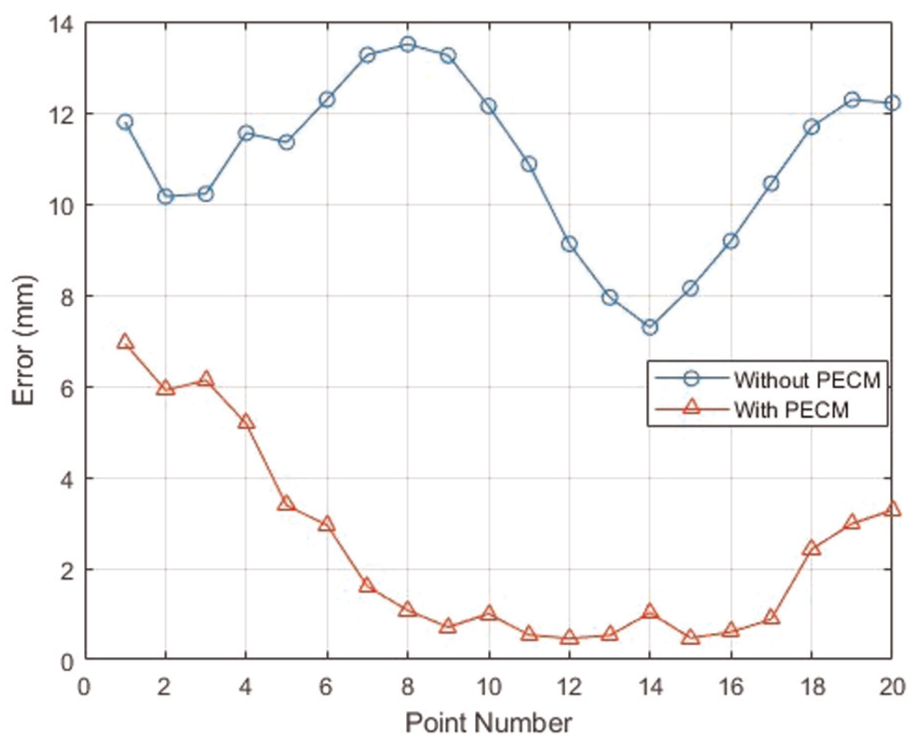
Comparison of Cartesian position errors before and after applying PECM in the predicted-error mode.
The PECM algorithm then used the numerical Jacobian to iteratively correct the joint command. Results are summarized in Table 3, indicating a dramatic improvement in positioning accuracy. Beside, each PECM iteration completed in under 20 ms on a standard laptop (Intel Core i7), making the method suitable for real-time control at frequencies up to 50 Hz.
Average Cartesian position errors before and after applying the positioning error compensation method (PECM) in measured-error and predicted-error modes.

Discussion and conclusion
This study presented an integrated framework that combines hybrid geometric calibration with a model-free error compensation strategy for enhancing the positioning accuracy of a 5R1P spherical parallel manipulator. The overall approach addresses both systematic and residual errors, relying only on forward kinematics, and eliminates the need for inverse kinematic models which may be unavailable or non-analytic in complex or redundant systems. Although the present study focuses on a 5R1P spherical parallel manipulator, the proposed calibration and compensation framework is generalizable to other parallel or hybrid architectures possessing multiple degrees of freedom, as long as their forward kinematic model can be derived numerically or symbolically.
The geometric calibration employed a two-stage optimization scheme—global exploration using Particle Swarm Optimization (PSO) followed by local refinement via the Levenberg–Marquardt (LM) algorithm. As shown in Table 2, the mean Cartesian position error was reduced from 16.36 to 1.39 mm (91.5% improvement), and the mean orientation error from 0.0935 to 0.0263 rad (71.9% improvement). These results confirm that the hybrid optimization robustly identifies D-H parameters that reconcile model predictions with measured behavior.
To compensate residual configuration-dependent deviations, a Positioning Error Compensation Method (PECM) was proposed. Unlike conventional approaches that rely on inverse-kinematics Jacobians, PECM iteratively corrects joint commands using a numerically estimated forward-kinematics Jacobian. Two operational modes were validated: a measured-error mode, leveraging optical-tracking feedback, and a predicted-error mode, using an Adaptive Neuro-Fuzzy Inference System (ANFIS) to estimate Cartesian errors. The PECM achieved 97% and 73% reductions in average position error, respectively (Table 3).
The proposed framework is particularly advantageous for applications involving complex mechanisms or redundancy. It avoids the computational and analytic complexity of inverse solutions and is suitable for real-time implementation. In previous studies, Position Error Compensation Methods (PECM) were typically implemented using Jacobians derived from inverse kinematics, since these provide a direct mapping from Cartesian error to joint corrections. However, such IK-based Jacobians are prone to numerical inversion errors, sensitivity to redundancy, and branch-selection ambiguities, which often limit their stability and accuracy. By contrast, the results of this study demonstrate that employing a forward-kinematics-based Jacobian within PECM yields superior performance for redundant spherical parallel robots. The FK-based Jacobian directly captures the differential mapping between joint and task space without requiring inverse solutions, leading to more predictable convergence under iterative correction and more robust trajectory tracking.
Each PECM iteration required less than 20 ms on a standard laptop, enabling real-time execution at 50 Hz. The method therefore offers both analytical simplicity and computational efficiency, making it well-suited for embedded control of compact or redundant manipulators.
While the framework markedly improves static positioning accuracy, future research will extend it to dynamic conditions, including vibration, compliance, and servo delay effects. Adaptive workspace sampling and online learning will be explored to strengthen generalization under untested configurations. Further integration with temperature compensation and multimodal sensing could expand applicability to surgical robotics, satellite-orientation systems, and high-precision inspection tasks.
Overall, the proposed hybrid calibration and model-free compensation approach provides a scalable, inverse-kinematics-free solution for high-precision parallel manipulators. Its combination of geometric refinement, data-driven prediction, and iterative correction establishes a practical foundation for next-generation robotic accuracy enhancement.
Footnotes
Appendix
Handling Editor: Sharmili Pandian
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by Chang Gung Memorial Hospital, Taiwan, under Grant No. CMRPD2P0081, and the National Science and Technology Council, Taiwan, under Grant No. NSTC 114-2221-E-182-034.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.