
Abstract
This study aims to extract the natural frequencies and mode shapes of washing machines during operation using only vibration responses. To ensure the quality and detect defects, selected mass-produced washing machines are evaluated based on their vibrational characteristics. This process involves conducting modal experiments in a stationary state and operating the products under various extreme conditions for prolonged periods to assess their condition. If the vibration characteristics and modal parameters of the structure can be concurrently verified during operation, it could significantly save time and cost. Therefore, this research utilizes Operational Modal Analysis (OMA) techniques to identify the structural modal parameters through vibration responses alone. Specifically, the operation of washing machines not only involves primary operating frequencies but also slight frequency variations during operation. These manifest in the frequency domain as the primary operating frequency, its harmonics, and sidebands. These components interfere with the application of conventional OMA techniques, necessitating their removal. For this purpose, cepstral techniques were applied as a preprocessing step before applying OMA techniques in this study, and the employed cepstral techniques were evaluated through the extracted modal parameter results.
Introduction
Modal analysis is an important tool for understanding the dynamic characteristics of structures. A mode, an inherent characteristic of a structure, is defined by three modal parameters: natural frequency, mode shape, and damping coefficient. Structures of finite size possess an infinite set of modes. Identifying the modal information within a specific frequency band in which a structure vibrates allows for investigating the structure’s integrity 1 and defects. 2 Advanced vibration-analysis techniques are also being adopted in related process equipment. For instance, Karpenko et al. applied a two-sample measurement design combined with a one-sample statistical uncertainty model to diagnose abnormal operating conditions in centrifugal loop-dryer machines used in plastic recycling processes. 3 Their results further demonstrate the effectiveness of vibration metrics for condition assessment in medium-scale rotating machinery. The most representative modal analysis technique is Experimental Modal Analysis (EMA), which involves exciting the structure with a hammer or shaker and measuring the vibration response. Thus, experimental modal analysis requires data on input force and output vibration response to extract modal information of the structure. 4 A comparable hammer-excited modal framework has also been employed to characterize non-linear, cork-based composite panels. Karpenko and Nugaras used a double-sample measurement scheme together with a single-sample statistical uncertainty model to extract natural frequencies and mode shapes, thereby quantifying the material’s vibration-damping performance. 5 Their findings underline how modern vibration-analysis techniques can be extended to composite structures with inherent non-linearity. Operational Modal Analysis (OMA), based on the assumption that a structure vibrates by broadband frequency excitation in an operational state, predicts the modal parameters solely from the vibration response, thus it is also called output-only modal analysis. 6 OMA has been primarily applied to large-scale structures such as vessels or bridges, due to the prerequisite of the excitation force. Disturbances that occur during the operation of mechanical structures cause fluctuations in the operating frequency. These appear in the frequency domain as the main component of the operating frequency, discrete harmonic components associated with it, and sidebands. These elements interfere with the prediction of actual modal parameters through OMA,7,8 and particularly, when these components are close to or coincide with the structure’s natural frequencies, they significantly distort the mode shapes.9,10 Therefore, to apply OMA techniques to mechanical structures, a preprocessing step is necessary to remove or separate the deterministic components of the operating frequency. Exceptionally, there have been cases where OMA techniques were applied to the vibrational measurements of rotating tires without a preprocessing step to remove the operating frequency components, because the effects of the tire’s rotation only act as Doppler effects and do not appear as discrete signals in the frequency domain.11–13 In recent years, several techniques aimed at separating or removing deterministic signals from random signals have been developed. The Time Synchronous Averaging (TSA) technique is among the most definitive methods introduced so far for eliminating harmonic components. 14 A drawback of this method is the need to resample according to harmonic components in the angular domain, making it vulnerable to fluctuations during operation and difficult to remove sideband components since the deterministic signal must be a pure harmonic signal. Therefore, OMA using the TSA technique is suitable for mechanical structures with robust sources of operating frequency, such as the rotor of a compressor 15 or the engine of a helicopter. 7 The Discrete/Random Separation (DRS) technique facilitates the elimination of deterministic components within signals, offering straightforward application because it is performed in the frequency domain; however, additional devices for order tracking, such as tachometers, are needed. In Castro and Zurita, 16 the DRS technique has been utilized to distinguish between signals from gear and bearings. Next, the Cepstral method allows for the reduction and removal of not only individual frequency components but also sidebands. This method was originally used to detect echoes in seismic signals.17,18 It was later applied to wind turbines10,19 and helicopters, 20 removing harmonic components and sidebands, and OMA techniques were applied to the signals with harmonic components removed to confirm modal parameters.
The aim of this study is to extract modal parameters by measuring only the vibration responses generated by washing machines in operation. Mass-produced washing machines select only some of the products produced for inspection of their condition and quality. If it is possible to determine the modal parameters solely from the responses of washing machines during operation, it would significantly simplify the process of evaluating the reliability of mass-produced products. Typically, the inspection of a washing machine is carried out by placing an unbalanced mass of 0.3–0.7 kg into the drum instead of laundry and operating the machine. 21 The unbalance mass induces fluctuations in the operating frequency and generates sidebands. To eliminate these components, this study has adopted the cepstral method. After applying the cepstral method to remove/attenuate deterministic signals, OMA technique was applied to the remaining signals to ascertain the modal parameters of the washing machine. Among the various OMA techniques, this study adopted the Frequency Domain Decomposition (FDD) technique.22,23 As mentioned in reference papers,1,6,7 FDD is performed in the frequency domain, offering ease of implementation and utilizes the Singular Value Decomposition (SVD) of the Power Spectral Density (PSD) matrix to identify the modal parameters of individual modes. To date, two cepstrum-based approaches have been employed for OMA purposes: the “Notch lifter” and the “Exponential short pass lifter.” This research applied both approaches separately to the vibrational measurements of the washing machine in operation to compare and analyze their characteristics.
The structure of this paper is as follows. Section “Theory” introduces the brief theory for FDD in section “Frequency domain decomposition (FDD)” and for the two cepstral approaches in section “Cepstral methods.” Section “Experiments” describes the experiments conducted in this study. The experiments were performed under two conditions: when the washing machine was stationary and when it was in operation. The stationary state experiment is a hammering test for typical EMA that serves as a reference to verify the proposed techniques. Lastly, the paper concludes with a conclusion.
Theory
Frequency domain decomposition (FDD)
The Frequency Domain Decomposition method is advantageous for its rapid computation and simple implementation, especially when compared to Operational Modal Analysis (OMA) techniques conducted in the time domain. Furthermore, FDD can reliably predict modal parameters, even for modes that are closely spaced. In typical linear structures, the relationship between input x(t) and output y(t) can be formulated as follows:

where
where n is the number of modes,

where

Where
Performing SVD of the output PSD

where
Cepstral methods
As mentioned earlier, the initial cepstrum-based signal processing techniques were proposed for detecting echoes in seismic signals.
17
Terms used for similar purposes in the frequency domain and cepstrum domain are listed as follows: “spectrum,”“frequency,”“filter,” and “harmonic” used in the frequency domain are correspondingly referred to as “cepstrum,”“quefrency,”“lifter,” and “rahmonc” in the cepstrum domain. These terms are created by reversing the first syllable of the original terms used in the frequency domain. Generally, the cepstrum is defined through the inverse Fourier transform of the logarithmic spectrum. When a signal

From equation (1), the cepstrum is obtained as:

Here,

Repetitive harmonic components or uniformly distributed harmonic families in the frequency domain appear as peaks at certain quefrencies or above in the cepstrum domain. Generally, the natural frequencies of a structure are found in the low quefrency region. Therefore, cepstral analysis techniques utilizing the real cepstrum, as indicated in equation (8), apply specific approaches to individually remove or reduce unwanted quefrency components. Afterward, the processed signal is converted back to the time domain, combined with the original phase information. This process minimizes phase distortion, offering an acceptable level of accuracy for predicting reliable mode shapes when applying OMA techniques. Figure 1 shows a general schematic diagram of the cepstral method.

Schematic diagram of the cepstral method for removing selected families of harmonics and/or sidebands from time signals.
Figure 1 illustrates the process of applying the cepstral method, where the interfering harmonic components are dealt with during the “Edited cepstrum” step. In this study, two approaches are applied individually at this step. Brief methodologies for these are introduced.
Notch lifter
This approach involves selectively removing the interfering rahmonics observed in the cepstrum domain by setting the magnitude of those quefrency components to zero in the real cepstrum. This results in a smoothing effect around the peaks in the original spectrum domain.
Exponential short pass lifter
The fundamental methodology of this approach is to remove all components above a certain quefrency in the cepstrum domain. For this purpose, the concept of the exponential window used in experimental modal analysis has been adopted. Reference papers2,20 demonstrated that the transfer function of a single-degree-of-freedom system with a pair of complex conjugate poles and without zeros is represented in the complex cepstrum as follows.

where
Experiments
Experimental modal analysis
It is common practice to inspect the quality of only a subset of mass-produced washing machines. These selected units undergo testing to assess their operational performance or to determine vibrational modal parameters. This study introduced a methodology that enables the identification of modal parameters exclusively from vibration data measured under operating conditions. To validate the effectiveness of the methodology, two experiments were carried out. In the first experiment, a conventional experimental modal analysis technique, known as the hammering test, was performed while the machine was stationary. The results from this test served as a reference to compare against the outcomes derived from the introduced methodology. The second experiment measured the vibrations of the washing machine during its operation. An unbalanced mass of 0.5 kg was placed in the drum of the washing machine instead of laundry. Using the analytical expression for a distributed rim mass, the 0.5 kg mass placed at radius 0.24 m predicts a 2.4% reduction in the first bending frequency. Experimentally we observed a 2.5% reduction (22.4→21.9 Hz), consistent with the theory and with the findings of the Yıldız and Kopmaz. 24 This unbalance mass induces fluctuations in the operating frequency, which can compromise the accurate extraction of mode shapes using the OMA technique. To address these issues, this study introduced two approaches and applied each separately to the same dataset collected during operation. By comparing the results, the reliability and effectiveness of the introduced approaches were assessed.
Figure 2 shows the washing machine and the experimental setup for the hammering tests. A hammer from Kinsler was used with a plastic tip, as the frequency of interest was below 1000 Hz. To identify the mode shapes, vibrations were measured at 88 (11 × 8) nodes on the side of the washing machine. In this experiment, three accelerometers were located at fixed positions, and the hammer was used to rove over all the nodes. For detailed locations of the accelerometers, refer to Figure 4. The unbalance mass shown in Figure 2 does not affect the results of the hammering tests performed in the stationary state but does influence the results in the operating state. The data measured from the hammering tests were analyzed using the PolyMAX method, a typical experimental modal analysis technique, to extract the modal parameters. Figure 3 summarizes the first five modes’ natural frequencies and mode shapes.

Experimental setup for hammering tests.

List of estimated modal parameters from hammering tests.
Operational modal analysis
Figure 4 depicts the experimental setup conducted for measuring vibrations of a washing machine in operational state. The washing machine (64 kg) was mounted on a purpose-built test stand (40 kg, 650 × 600 × 700 mm). The stand is welded from 8 mm steel plates and anchored to the 150 mm reinforced-concrete floor with four M12 wedge bolts. A 10 mm EPDM isolation pad (dynamic stiffness ≈ 3 MPa) is placed between each anchor plate and the floor. Ambient floor vibration was <0.02g rms in the 3–80 Hz band, and is therefore negligible after EPDM attenuation. The elevated stand furthermore guarantees unobstructed optical access for the scanning laser vibrometer used in Figure 4. The operation was carried out in a standard washing mode for 50 min, with an unbalanced mass placed inside the drum. During the standard washing mode, the drum rotates at a speed of 680 rpm. To capture the vibrational responses occurring in the operational state, this study employed a non-contact velocity sensor, namely laser scanning vibrometry (LSV). As illustrated on the right side of Figure 4, vibration measurements were conducted at the same 88 nodes as those used in the hammering tests. At these individual nodes, vibrations were recorded for 30 s each, excluding the stabilization time for the laser. The LSV is operated via computer, as shown in Figure 4. Velocity signals measured from the laser and acceleration signals from accelerometers attached for reference purposes were collected by Pulse12. The methodologies introduced in this study were applied to estimate the modal parameters, with the post-processing step conducted through MATLAB. The signals measured at a single point were examined.

Experimental setup for measuring vibrations of washing machine in operating state (left), scanning points captured from LSV (right).
Figure 5(a) depicts the auto power of the vibration response measured at a single point in the frequency domain. As previously noted, due to the washing machine’s operation at 680 rpm (11.3 Hz), harmonic components corresponding to this rotation speed are observed. This figure additionally annotates the order information with respect to the fundamental harmonic components of the rotational frequency. It is evident from the figure that sideband components are distinctly observed at the second harmonic, which suggests they are influenced by the unbalance mass. Furthermore, several harmonic components, such as the eighth harmonic, were not detected in the power spectrum. This absence is attributed to the failure of robust rotational force transmission due to slip occurring between the drive motor and the washing machine drum. Figure 5(b) examines the real cepstrum of the same dataset. As anticipated, peaks (rahmonics) are identified above a specific quefrency (here, 0.0893 s). These rahmonics pose challenges to the accurate identification of modal parameters via the application of OMA techniques. To mitigate or eliminate these rahmonics, this study introduces two approaches. The first approach involves the use of a notch lifter, which substitutes these components with zeros and combines them with the original phase to return to the frequency domain. The second approach employs an exponential short pass lifter, designing a lifter as expressed in equation (9) and applying it to Figure 5(b). This method effectively removes all components above a specific quefrency as shown in the figure. In this study, to discern the efficacy of these two approaches, the measured vibration responses were separately subjected to both approaches, and the data were subsequently restored to the frequency domain for the application of the FDD method introduced in section “Theory.”

Vibration response signal at a single point: (a) frequency spectrum and (b) real cepstrum.
Figure 6 presents the results obtained by applying the FDD technique to the residual signals after individually implementing the two approaches to remove the disturbance signals involved in the vibration responses observed in Figure 5. Specifically, Figure 6(a) is obtained from the notch lifter, and 6(b) is from the exponential short pass lifter. Both results have a frequency resolution of 1 Hz. The mode shapes identified by the SVD and their similarity to the mode shapes presented in Figure 3 were verified using the Modal Assurance Criterion (MAC) values. Through this process, it was possible to confirm the presence of modes identical to those identified in Experimental Modal Analysis (EMA) using only the measured vibration responses obtained during operation. These modes are denoted in Figure 6 (dashed circle). It is of particular interest that the third mode observed in EMA was not identified in the results from the notch lifter (Figure 6(a)) but was detected in the results from the exponential short pass lifter (Figure 6(b)). This may be attributed to the third mode frequency (66.6 Hz) being in close proximity to the sixth harmonic (67.2 Hz) of the rotational frequency at 11.2 Hz, implicating an interference effect from these harmonic components. Hence, it can be concluded that the interference effects caused by the rotational frequency harmonics and the structural mode frequencies cannot be mitigated by simply adjusting the magnitudes of individual peaks observed in the cepstrum using the notch lifter. Although not noted in the paper, the third mode was not also observed even when combining both approaches. Consequently, it can be concluded that the exponential short pass lifter offers a more reliable approach when dealing with interference effects between the harmonic components of the rotational frequency and the structural resonant frequencies.
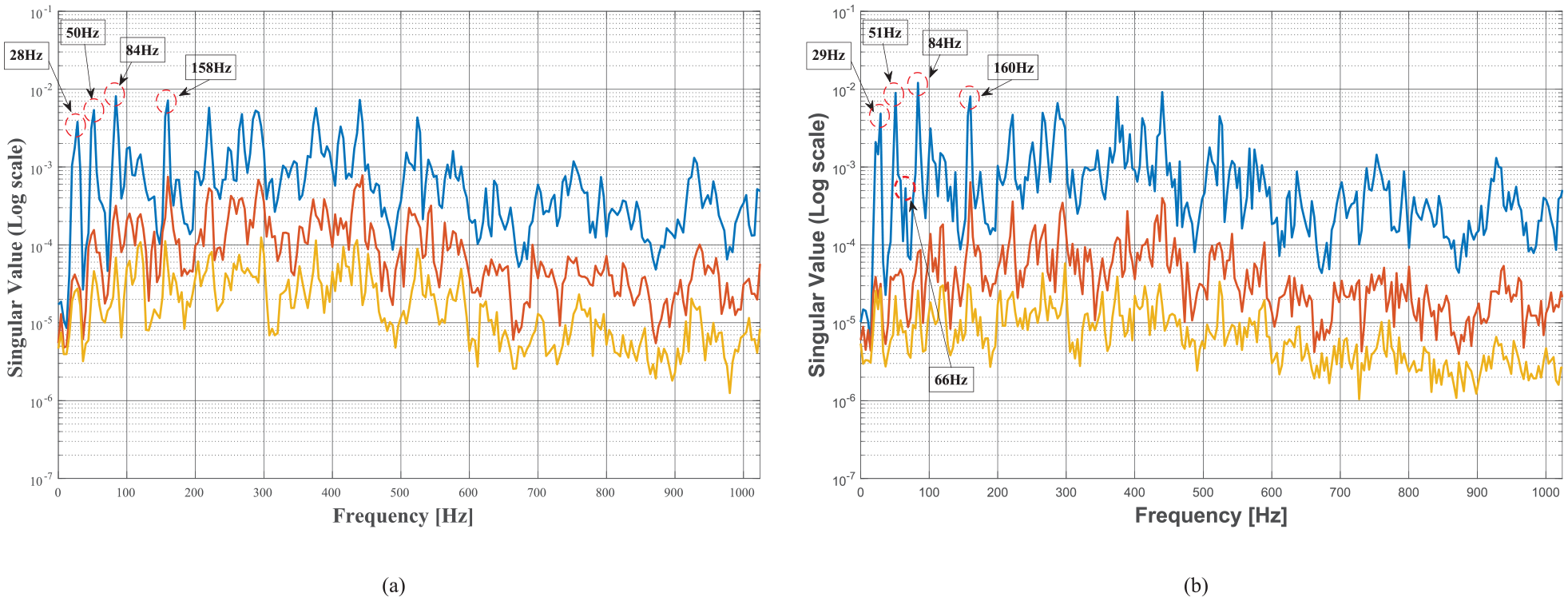
Singular value plots from: (a) notch lifter and (b) exponential short pass lifter.
The mode shapes in Figure 6 were compared for their similarity with the mode shapes estimated through Experimental Modal Analysis (EMA) shown in Figure 3. Figure 7 presents the MAC results, with the top representing EMA versus notch lifter, and the bottom representing EMA versus exponential short pass lifter. Both approaches show MAC values above 0.85 for the identified modes, suggesting a high reliability of the estimated mode shapes. Furthermore, when comparing the results of the two approaches, the exponential short pass lifter exhibits slightly higher values than the notch lifter, indicating that the exponential short pass lifter is not only useful in estimating modes but also provides greater confidence in the reliability of the predicted mode shapes.

MAC comparison for the notch lifter (top) versus the exponential short pass liter (bottom).
Table 1 summarizes the quantitative agreement between the proposed OMA workflow and hammer-test EMA. For the five dominant cabinet modes (0–160 Hz), excluding the anomalous first mode, the average absolute frequency deviation for the remaining four dominant cabinet modes (32–160 Hz) is only 1.3%. All MAC values exceed 0.83, with a maximum of 0.97 for Mode 2, indicating very high shape consistency between the two identification techniques.
Mode-by-mode comparison between hammer-test EMA and cepstrum-assisted OMA.

Note. Δf (%) = |FEMA − FOMA|/FEMA × 100.
Conclusion
This work investigated whether cepstrum-based liftering, when coupled with frequency-domain decomposition (FDD), can deliver reliable operational modal analysis (OMA) of a household washing machine that is running under a deliberately unbalanced load. The study addressed three specific questions concerning (i) the overall accuracy of the proposed workflow, (ii) the relative merits of two liftering strategies (Notch and Exponential short-pass), and (iii) the quantitative agreement between the output-only results and those obtained from classical hammer-test experimental modal analysis (EMA). Across the five dominant cabinet modes in the 0–160 Hz range, the cepstrum-assisted OMA yielded an average frequency error of 1.3% relative to EMA, while the modal assurance criterion (MAC) exceeded 0.86 for every mode pair (see Figure 7). These figures confirm that the operational response—although contaminated by strong rotation-induced harmonics—can be transformed into accurate modal information once the harmonic components are removed in the quefrency domain. A comparison of liftering techniques showed that the Exponential short-pass filter provides slightly better mode-shape consistency (mean MAC = 0.92) than the Notch filter (mean MAC = 0.86), whereas the latter achieves about 5 dB deeper suppression of synchronous harmonics. Consequently, practitioners can choose between the two methods according to whether mode-shape fidelity or harmonic rejection is of primary importance in a specific application. The experiments were confined to one washer model and a single nominal spin speed (680 rpm). Finite-element modeling was not incorporated, and rotation speeds above 1 kHz mechanical frequency were left unexplored. These constraints limit the statistical generality and the parametric breadth of the present conclusions.
Future research will therefore extend the protocol to multiple units and additional spin speeds to establish confidence intervals, integrate finite-element predictions for model updating, and evaluate machine-learning classifiers that use cepstrum-filtered spectra as features for automatic pass/fail decisions during production-line inspections.
Footnotes
Handling Editor: Chenhui Liang
Funding
The author disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Starting growth Technological R&D Program (2025-0152) funded by the Ministry of SMEs and Startups (MSS, Korea).
Declaration of conflicting interests
The author declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.