
Abstract
As unmanned aerial vehicle (UAV) technology has evolved, these systems are being increasingly utilized across diverse industries. However, controlling UAVs faces significant problems owing to several environmental circumstances and obstacles, making path planning a critical initial step for UAV operation. This paper offers an overview of UAV path planning research founded on intelligent algorithms, which are divided into three categories: computational intelligence (CI), machine learning (ML), and hybrid methods. Each category has been analyzed in depth to show its strengths, limits, and where it may be applied to UAV-related problems. The methodology includes a comparative analysis based on multiple performance metrics such as path length, flight time, collision avoidance, complexity, and environmental adaptability. Furthermore, the research covers the latest publications that deal with solving essential challenges of UAV path planning by using new hybrid algorithms and enhanced optimization methods. The results indicate that although each strategy offers specific strengths suited to particular scenarios, hybrid strategies are more likely to deliver greater flexibility and robustness, particularly in uncertain, and dynamic environments. These findings are significant for guiding future research in adaptive path planning and for supporting practical UAV applications such as autonomous delivery, aerial surveillance, disaster response, and environmental monitoring.
Keywords
Introduction
An unmanned aerial vehicle, often known as a drone, is a type of aircraft that does not require a human pilot on board. These vehicles can either be controlled remotely or autonomously by computers. Most recently, many fields have benefited from the use of UAVs. In agriculture, they have been employed for crop monitoring, 1 and irrigation management. 2 In the military field, they can provide many important functions such as the fulfilment of surveillance and reconnaissance, 3 and combat operations. 4 In building and engineering, the use of drones has helped improve project efficiency in safety monitoring. 5 Moreover, drones are utilized in disaster management, 6 delivery service, 7 emergency medicine, 8 and many other tasks. This makes them irreplaceable in a wide range of applications and an essential tool for various industries. Generally, UAVs operate in an obstructive and cluttered environment; for example, in an urban setting. 9 Therefore, UAVs should rely on intelligent path planning algorithms to ensure safe and efficient flight paths. The principal objective of the path planning problem for UAVs is finding an optimal trajectory along which an unmanned aerial vehicle could travel from its starting location to some specified target while taking into account several factors such as terrain and obstacles. 10
Path planning is a difficult task, and developing algorithms and techniques to address this issue has been the subject of numerous research papers. Over the last few years, some surveys have summarized the different methods. According to Table 1, they all contribute in some way to the advancement of comprehension and knowledge within a specific field of study. Actually, Zhao et al. 11 provided a detailed analysis of computational intelligence path planning algorithms in application for unmanned aerial vehicles. Debnath et al. 12 presented a survey of path planning algorithms in terms of energy efficiency, considering computation time, completeness, and path length. Cao 13 reviewed some UAV path planning approaches classified into two categories based on their discovery order: traditional algorithms and intelligent algorithms. Luo et al. 14 provided a comprehensive overview of UAV path planning approaches, which are divided into two classes based on algorithmic and functional levels. Ait Saadi et al. 15 presented an overview of UAV path planning algorithms, grouped into five major categories, including classical methods, heuristics, meta-heuristics, machine learning, and hybrid techniques. This paper offers a comprehensive overview of UAV path planning research focused specifically on intelligent algorithms. It divides these approaches into three main categories: computational intelligence (CI), machine learning (ML), and hybrid methods.
Summary of review papers on UAV path planning.

In Google Scholar, several key terms were used to gather research papers, including “intelligent algorithms for UAV path planning,”“machine learning algorithms for UAV path planning,” and “computational intelligence for UAV path planning.” This search strategy facilitated the emphasis of studies that only used intelligent algorithms for UAV path planning. Afterward, we looked at studies that proposed improved approaches specifically designed to address existing algorithms limitations by using specific terms such as “adaptive algorithms for UAV path planning,” and “hybrid algorithms for UAV path planning.” We also included searches on hybrid techniques, which explored combinations of intelligent algorithms as well as integrations of intelligent and classical methods, using terms like “hybrid algorithms for UAV path planning,” and “integrated CI and classical approaches.”
In this study, publications are collected from numerous databases, including IEEE, Springer, MDPI, Elsevier, and Wiley Online Library. Figure 1 presents the distribution of UAV Path Planning publications used in this study by databases. Due to the attention being paid to engineering and UAV-based technologies, the first place belongs to IEEE Xplore with almost 80 published articles. MDPI follows in second place with about 63 publications. Springer and Elsevier contribute equally. Beside them, Wiley Online Library and IOP Publishing provide a smaller number of papers.
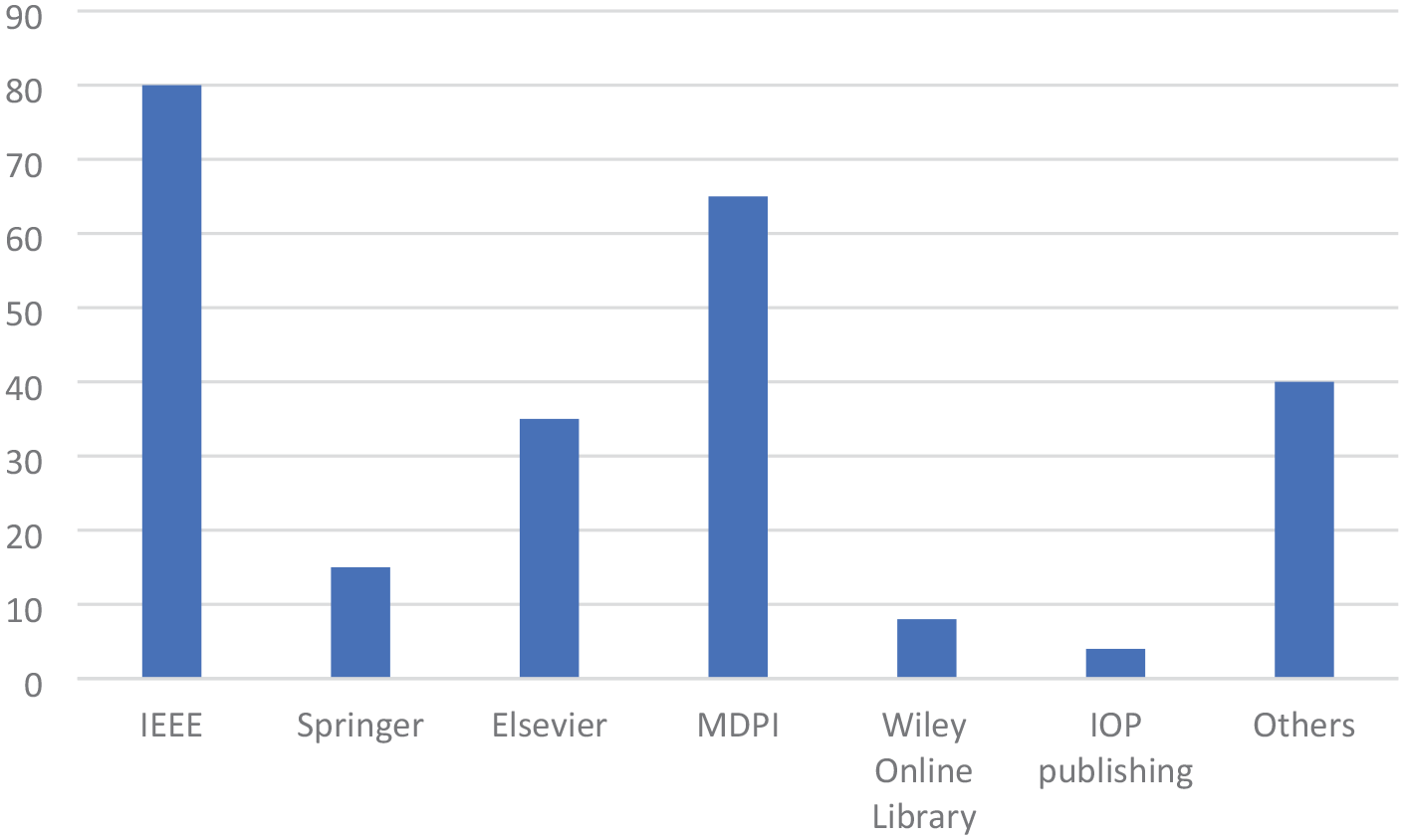
Distribution of UAV path planning publications by publisher database used in this study. A total of 213 publications were collected from six major databases: IEEE, Springer, Elsevier, MDPI, Wiley Online Library, and IOP Publishing.
The structure of this paper is organized as follows. Section 2 outlines key definitions, objectives, and constraints related to UAV path planning. Section 3 provides a succinct discussion of traditional algorithms used in UAV path planning, along with an analysis of their limitations. Section 4 classifies intelligent algorithms and discusses the various intelligent methods used in UAV path planning. Finally, the conclusion of this paper is presented in Section 5.
Key terms and definitions
The following section is intended to present some definitions and concepts that will be used in general to survey all research related to the path planning of UAVs using intelligent techniques.
Path planning
Path planning is the methodology of choosing an optimal route for UAV to move from a starting point to a target with consideration of constraints and obstacles. 16
Path planning objectives
Collision avoidance
Collision avoidance is the ability of UAVs to identify obstacles and move safely without incurring any collisions or physical damage. UAV safety through obstacle avoidance is discussed in.17,18
Path length
In their article,19,20 authors focus on minimizing the distance traveled by UAVs from the starting point to the desired destination (path length).
Time-efficiency
Time-efficiency refers to the ability of UAVs to move from the initial point to the target point while avoiding obstacles in the least amount of time possible, as discussed by Darbari et al. 21 and Huang et al. 22
Energy-efficiency
By definition, energy-efficiency is the minimum amount of energy required by UAVs to execute their missions, whether it be fuel, battery power, or any other type of energy. This concept has been explored by Modares et al. 23 and Fu et al. 24
Cost-efficiency
Cost efficiency refers to the total of various computational costs associated with UAVs, including hardware and software expenses, fuel costs, memory costs, battery charging costs, and CPU costs, as highlighted by Angley et al. 25 and Li et al. 26
Adaptability
Adaptability refers to the ability of a UAV to modify its planned path in real time in response to environmental changes. Liu et al. 27 and Ma and Chen 28 discuss adaptive path planning techniques for UAVs.
Path planning constraints
Altitude
Altitude is an essential element that needs to be balanced in order to ensure both safety and energy efficiency in UAV missions.
Energy consumption
During missions, energy is a major constraint for UAVs due to their limited battery or fuel capacity. This effectively reduces the capability of the UAVs to perform certain maneuvers.
Environmental constraints
Environmental constraints include weather conditions, such as high winds, rain, and snow; dynamic obstacles like moving vehicles and birds; and static obstacles, including buildings, trees, and any other kind of physical objects that could interfere with navigation.
Geometric constraints
The geometric constraints include factors that pertain to physical dimensions of UAVs, minimum turning radius, maximum/minimum velocity, and climb/descend angles.
Brief overview of traditional path planning algorithms
Traditional path planning methods have laid the foundation for the development of modern intelligent approaches. Conventional methods include, but are not limited to, grid-based methods,29,30 potential-based methods,31,32 and sampling-based methods.33,34
Grid-based methods
In grid-based techniques, the environment is divided into cells, and algorithms such as A-star, 35 A-star and its variants, 36 improved A-star,37,38 and Dijkstra’s algorithm,39,40 are used to determine the optimal path from the start to the goal.
Graph-based methods
Different techniques like visibility graph,41,42 Voronoi diagram,43,44 depth-first search, 45 and breadth-first search 46 should be emphasized in graph-based path planning.
Sampling-based methods
Sampling-based methods randomly sample the points in the environment and use probabilistic frameworks to guide the search for the optimal path for the UAV, Examples of these techniques include Rapidly-Exploring Random Trees (RRT), 47 RRT*, 48 and Probabilistic Roadmaps (PRM). 49
Potential-based methods
The potential field methods utilize a combination of both repulsive and attractive forces that can be employed to steer a UAV to its target while avoiding any obstacles along the way. The repulsive force guides the UAV away from obstacles, while the attractive force attracts it toward the target. The Artificial Potential Field (APF) algorithm is the most useful path planning method for UAVs.50,51
Complexity and limitations of traditional path planning algorithms
Classical algorithms have greatly improved UAV navigation proficiency, but their computational complexity renders them ineffective in large-scale or dynamic applications. Big O notation is a way to describe how an algorithm’s performance (in terms of runtime, memory) scales as the size of its input grows, particularly focusing on the worst-case scenario. For instance, the A* algorithm 52 has a time complexity of O (bd). In this case, b stands for the branching factor and d is the depth of the optimal path. This exponential complexity makes it inefficient in environments that have high dimensions or are densely cluttered. Furthermore, its space complexity also grows exponentially since it stores all the nodes that have been generated in memory. As a result, memory usage grows very quickly with map size and search depth, posing serious scalability problems. Dijkstra’s algorithm has a worst-case time complexity of O (n2), where n is the graph’s number of vertices. This complexity can be minimized by employing better data structures. For instance, implementing the algorithm with a binary heap brings complexity down to approximately O ((n+m) log n), and with Fibonacci heap to O (m+n log n), where m is the number of edges. These improvements help the algorithm become much faster, particularly for graphs that are not so dense. 53 Depth-First Search (DFS) and Breadth-First Search (BFS) both share the same time complexity of O (n+m) and are thus perfect for unweighted graphs but not so good in weighted or complex situations. 54 Sampling-based motion planning algorithms such as (PRM) and (RRT) typically have time complexity of order O (n log n) and space complexity usually considered to be O (n) where n is the number of samples. 55 Potential field-based methods, such as the Artificial Potential Field (APF) algorithm, generally take O (n) time and space complexity, where n is the number of obstacles in the environment. Although they offer real-time performances and simplicity of implementation, they are generally prone to local minima and do not provide good performance in complicated environments. 56 To overcome such limitations, researchers have been more and more adopting intelligent algorithms, particularly those based on computational intelligence (CI), machine learning (ML), and hybrid solutions. Intelligent algorithms offer a flexible and robust framework for addressing problems characterized by real-time environmental changes, sensor noise, and high-dimensional state spaces. However, even though CI and ML techniques significantly enhance the decision-making capacity and adaptability of UAVs, they can also come with great computational costs, such as long training times in ML techniques. To overcome this and to take advantage of the strengths of intelligent and traditional methods, hybrid algorithms have been researched increasingly. These techniques integrate traditional planning algorithms with CI or ML components to improve computational efficiency and path planning reliability. For example, the RFA-Star technique 57 integrates the classical A* algorithm with a feature attention mechanism. The proposed algorithm achieves a time complexity of O (n log n), showing strong computational efficiency and robustness in environments with dense obstacles. On the other hand, the RRT+DQN algorithm 58 exhibits also a time complexity of O (n log n), demonstrating robust performance and efficient obstacle avoidance in dynamic situations.
Classification and analysis of intelligent path planning methods
Traditional algorithms are valued for their ease of implementation and ability to rapidly generate feasible solutions in simple, well-defined environments. However, their application in complex problems (such as real-world scenarios) is probably the more challenging part. Consequently, researchers are increasingly using more advanced approaches such as artificial intelligence (AI) and machine learning (ML) to keep up with the growing requirements of UAV path planning. Figure 2 illustrates the classification of these intelligent algorithms.
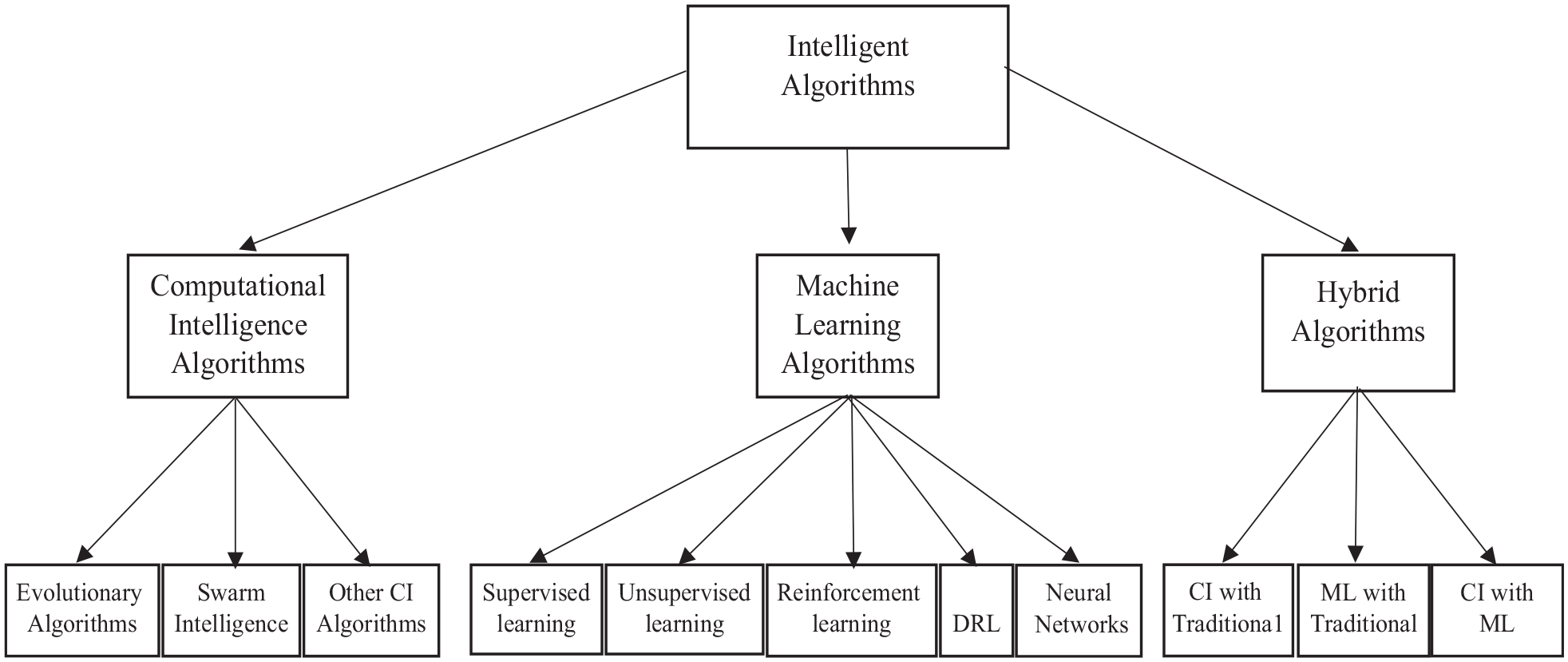
Classification of intelligent algorithms for UAV path planning.
Mathematical definition and distinction between CI, ML, and hybrid approaches
Intelligent algorithms for UAV path planning are generally grouped into three major paradigms: Computational Intelligence (CI), Machine Learning (ML), and Hybrid approaches. The three paradigms vary in conceptual foundation, mathematical expression, and mode of interaction with data and the environment. Computational Intelligence (CI) is a broad field that uses various nature-inspired and heuristic techniques to discover solutions to challenging problems. However, it is important to note that the meta-heuristic optimization algorithms make up a major part of CI, and they can be classified into single-solution and population-based methods depending on the number of candidate solutions maintained at each iteration.59,60 A number of algorithm types belong to the population-based category, such as Genetic Algorithms (GA), Particle Swarm Optimization (PSO), Ant Colony Optimization (ACO), Artificial Bee Colony (ABC), and Differential Evolution (DE). On the other hand, several types of algorithms fall into the single-solution-based category, such as Simulated Annealing (SA), Tabu Search (TS), and others. As a population-based techniques, Particle Swarm Optimization (PSO)
61
searches for an optimal solution through a group of particles (swarm), with each representing a candidate solution. Velocity and position vectors for each particle are continuously updated by tracking the particle’s own best position (

Where,

Where,
On the other hand, one of the most powerful features of machine learning is that it can learn and improve its performance continuously from the data. Reinforcement Learning (RL) has been among the most effective ML approaches because it directly aims at decision-making in changing environments by combining machine learning and optimal control. In the context of path planning, an agent learns optimal behavior by interacting with the environment. During training, it receives a state as input, selects an action, observes the next state, and is then rewarded or penalized based on the outcome of its action. A multi-episode training process allows the agent to learn to select actions in accordance with maximum rewards, even under uncertain or dynamic conditions.
63
Reinforcement learning mathematically aims to find a strategy, also known as a policy

Here,

Here,
Hybrid approaches represent a third paradigm that combines elements of Computational Intelligence (CI), Machine Learning (ML), and sometimes traditional path planning techniques. For instance, In CI with traditional algorithms (TCi), methods like Genetic Algorithms (GA) are used for generating and optimizing candidate UAV paths, while A* is employed to refine those paths using heuristic-based search. 66 In ML with traditional algorithms (TMl), one of the usual hybridizations is the use of reinforcement learning coupled with APF technique for UAV path planning improvement in dynamic environments. RL is utilized as a global planner, searching for targets and planning optimal route, while APF is used as a local controller, giving real-time obstacle avoidance. 67 In CI with ML algorithms (CiM), researchers often combine Particle Swarm Optimization (PSO) with Deep Q-Networks (DQN). PSO provides global search capabilities for UAV path planning optimization, whereas DQN is focused on learning a policy, enabling the hybrid model to balance exploration, and exploitation strategies. 68
Performance metric selection and trade-offs
In this paper, several metrics are considered in order to evaluate and compare the performance of intelligent path planning algorithms for UAVs. These metrics include path length, execution time, flight time, collision avoidance, energy efficiency, robustness, stability, and convergence speed. However, selecting the right metric is highly dependent on UAV mission-specific requirements and operational constraints. For instance, path planning of multi-UAV in 3D heterogeneous environment with variable coverage of GNSS satellites is targeted toward the minimization of path length and flight time. 69 In contrast, for the case of environments where safety is of utmost priority, such as maneuvering through dynamic threat environments, performance metrics like collision avoidance and robustness are essential in order to ensure safe navigation and successful mission completion. 70 For long-duration UAV missions such as in precision agriculture, energy efficiency is a key performance metric. An example of this is a UAV-based irrigation system for olive farms. 71 Additionally, in complex terrains such as bridge construction sites, 72 researchers have been concerned with improving convergence speed and stability. Due to the different objectives of UAV operations, many recent studies have also focused on multi-objective optimization, where multiple metrics such as path length, execution time, energy efficiency, and stability are balanced simultaneously.73,74 However, optimizing multiple criteria often involves inherent trade-offs, where Improving one metric may lead to the deterioration of another. These sorts of trade-offs need to be appreciated in selecting intelligent path planning algorithms suitable to the specific needs of UAV missions. Some of the most common trade-offs encountered in existing UAV path planning research are outlined below: 4.2.1 Path length versus Collision avoidance: In order to remain safe, a UAV can divert from the shortest route in order to avoid obstacles. This safety requirement may lead to longer paths, longer flying time, and therefore increased energy consumption. Conversely, when minimization of path length is preferred, the UAV might follow a more straight-line path that poses a greater chance of collision. 4.2.2 Energy Efficiency versus Computational time: Enhancing the energy efficiency of UAV path planning might require the application of intelligent algorithms such as reinforcement learning (RL) methods, which are capable of generating smooth paths. However, these approaches are then accompanied with large computational time, particularly in dynamic and uncertain environments where there is a requirement of real-time adaptation and learning. 4.2.3 Convergence speed versus Stability: Recent studies show that convergence speed and stability trade off fundamentally. Algorithms that converge faster tend to be less stable in dynamic environments, whereas those with emphasis on greater stability often experience slower convergence speeds, and require longer training times. This trade-off is intrinsic to many machine learning methods, including deep reinforcement learning.
Computational intelligence algorithms
Computational Intelligence (CI) 75 refers to a collection of computational methods and approaches inspired by natural processes. These methodologies are particularly effective in solving complex, real-world problems where traditional mathematical models or conventional techniques are not feasible. Several Computational Intelligence (CI) algorithms have been employed for UAV path planning, as summarized in Table 2. There are two major subsets within computational intelligence: Swarm Intelligence (SI) and Evolutionary Algorithms (EAs).
Summary of computational intelligence algorithms for UAV path planning.

Swarm intelligence
Today, Swarm Intelligence (SI) 88 is generally recognized as a branch of Computational Intelligence (CI) inspired by the collective behaviors of biological organisms like bees, ants, birds, fireflies, bats, monkeys, and wolves. Algorithms in this field include Particle Swarm Optimization (PSO), 89 Ant Colony Optimization, 90 Artificial Bee Colony (ABC), 91 and Gray Wolf Optimizer (GWO). 92
Nayeem et al. 76 suggested an improved Particle Swarm Optimization (PSO) algorithm, called n-PSO which utilizes a dynamic neighborhood approach to enhance particle diversity. The effectiveness of n-PSO was tested in a 3D environment with static obstacles. Test results showed that the n-PSO algorithm gives better performance compared to constriction factor PSO (c-PSO) 93 and time-varying inertia weight PSO (w-PSO) 94 in terms of path generation and time cost.
Sonny et al. 77 proposed a modified PSO algorithm for solving the path planning problems related to drone delivery, aiming to provide the most energy-efficient route for UAVs from the starting point to the destination. The performance of PSO algorithm was assessed in three different scenarios featuring 12 static obstacles. Experimental results demonstrated that modified PSO outperforms state-of-the-art methods in terms of path length, energy consumption, and travel time.
Qi et al. 78 suggested an improved ant colony algorithm (IACA) for optimizing the UAV path planning. The performance of the IACA algorithm was assessed in a 2D simulation environment using a grid map specifically designed for multi-rotor UAV. In comparison with GA and basic ant colony algorithm (BACA), IACA gives better results in terms of path length, convergence speed and flight time.
In the work of Lin et al., 79 an improved artificial bee colony algorithm based on multi-strategy synthesis (IABC) was proposed to optimize UAV path planning in a complex, urban environment. The effectiveness of the improved ABC was evaluated in a 3D complex environment across three cases, with four obstacles in the first case, six obstacles in the second, and 12 obstacles in the third. Simulation results proved the effectiveness of IABC algorithm compared to PSO, ABC, SABC, 95 and GABC 96 in terms of stability, convergence speed, and path generation.
Rao et al. 80 proposed an enhanced gray wolf optimizer, called, multi-strategy collaborative gray wolf optimization algorithm (NOGWO), which includes additional strategies like random walk strategy, opposition-based learning, and a novel convergent factor for solving the UAV path planning problem. Test results demonstrated the effectiveness of NOGWO algorithm compared to GWO, WOA, 97 DE, 98 ALO, 99 and SCA 100 in terms of convergence speed and precision. Additionally, NOGWO outperformed the three swarm intelligence algorithms: GWO, SCA and WOA in terms of path length and cost efficiency.
Evolutionary algorithms
Evolutionary algorithms 101 are a class of Computational Intelligence methods that use concepts of natural selection and genetics to find solutions to complex optimization problems. Notable algorithms in UAV path planning include Genetic algorithms (GA), 102 and differential evolution (DE). 103
Wang and Chen 81 developed a novel approach using an improved genetic algorithm (GA) for solving the UAV path planning problem. In this paper, three types of path planning schemes are presented based on prior knowledge: Directly Through, Insertion Through, and Bypass Through. Simulation results showed that the prior knowledge based genetic algorithm outperforms the traditional GA in terms of convergence rate, collision avoidance, and path optimization.
Yuan et al. 82 presented an improved coverage path planning algorithm based on the combination of the good point set technique with genetic algorithm (GPSA-GA) for a fixed-wing UAV. In order to assess its robustness, GPSA-GA was tested 20 times in coverage areas of 20, 50, 80, and 100 paths, respectively. Experimental results demonstrated the superiority of the GPSA-GA compared to conventional GA in terms of path length and convergence speed.
Yin et al. 83 suggested an adaptive differential evolution, called DE-dynamic Thompson sampling (DE-DYTS) based on the integration of dynamic Thompson sampling into DE to address the collaborative path planning problem for multiple UAVs. The performance of DE-DYTS algorithm was evaluated in a 3D environment based on three experiences using two UAVs in the first, three UAVs in the second, and five UAVs in the third. In comparison with DE, IMODE, 104 and SHADE, 105 DE-DYTS gives better results in terms of path optimization, and risk avoidance.
Zeng et al. 84 developed a differential evolution-Cooperative Search for Multiple UAVs (DECSMU) for solving the multi-UAV path planning problem. In this method, a dynamic reward function was developed to improve coverage efficiency and energy consumption and a distributed model predictive control (DMPC) strategy was employed to achieve the collaborative coverage of multiple UAVs. The effectiveness of DECSMU algorithm was validated in three different search regions: two convex regions (a circular region and a rectangular region) and one non-convex region, using a group of four UAVs.
Other CI algorithms
In addition to the CI algorithms discussed above, there are many other algorithms that can solve UAV path planning problems or help improve performance, such as simulated annealing (SA), 106 Tabu search (TS), 107 Multi-Verse Optimization (MVO). 108
Huo et al. 85 developed a novel simulated annealing algorithm, called Swap-and-Judge Simulated Annealing (SJSA) algorithm based on the integration of Swap-and-Judge strategy into SA for solving Multi-UAVs path planning problem in disaster relief. The performance of SJSA was evaluated in six scenarios with different numbers of target nodes and UAVs. Simulation results demonstrated the superiority of SJSA compared to DIDE, MGA, DISA, and the exact algorithm CPLEX in terms of running time and convergence rate.
Tong et al. 86 proposed an improved variable neighborhood Tabu search algorithm for solving the UAVs path optimization problem for truck–drone delivery. The experimental results proved that the proposed method outperformed traditional truck delivery in terms of delivery time. This approach effectively optimizes the truck–drone delivery route, improving overall efficiency.
In the work of Kumar et al., 87 a Multi Verse Optimizer (MVO) algorithm was suggested for UAV path planning to improve the Quality of Service (QoS) in UAV environment. The robustness of the proposed algorithm was tested in 6 different cases. Experimental results showed that MVO algorithm gives better performance compared to GWO, 109 WOA, 97 DA, 110 ALO, 99 and MFO 111 in terms of convergence rate, execution time, and path cost.
Critical analysis
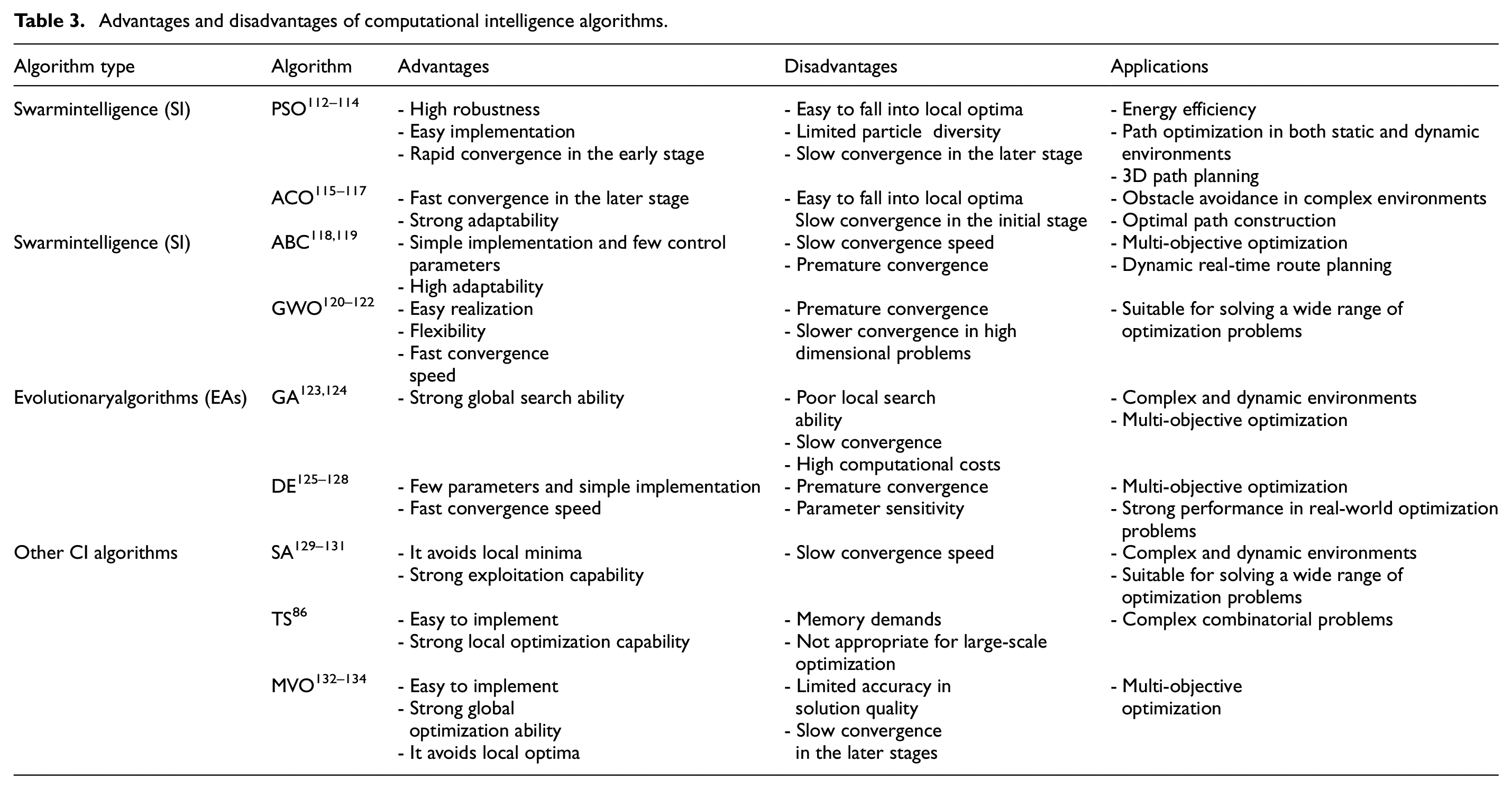
In this section, various UAV path planning algorithms based on computational intelligence are examined as effective solutions for handling complex and dynamic environments and adapting to a wide range of UAV missions. On the one hand, these methods have their merits in some aspects; on the other hand, they are suboptimal since most of them converge more slowly and suffer from falling into local optima, as summarized in Table 3.
Advantages and disadvantages of computational intelligence algorithms.
To address these limitations, recent advancements in computational intelligence (CI) have employed hybrid methods,135,136 adaptive strategies,137,138 and enhanced optimization techniques.139,140 In hybrid methods, different algorithms are implemented together to take advantage of their respective strengths and compensate for their weaknesses. For example, combining PSO with a similar computational intelligence algorithm like GA, 141 enhances the ability to escape local minima while benefiting from GA’s high-quality solutions. The integration of machine learning algorithms is also widely used, such as merging GA with Q-learning algorithm 142 to leverage GA’s optimization capabilities and QL’s real-time decision-making. Additionally, adaptive techniques such as adaptive population size enable differential evolution to overcome population stagnation and enhance the algorithm’s search performance. 143 Finally, improved optimization techniques, such as introducing Levy and Cauchy distributions to enhance the employed bees’ search strategy, 144 and using mutation crossover factor optimization strategy in the Differential Evolution (DE) algorithm to overcome the problem of path planning of UAVs in complex environments. 145 Table 4 presents a collection of research that addresses challenges within CI algorithms, highlighting improved methods and techniques designed to enhance the ability to escape local optima, convergence speed, path generation, and adaptability for UAV path planning applications.
Recent improvements in computational intelligence algorithms for UAV path planning.

Machine learning algorithms
In order to solve the UAV path planning problem, a variety of machine learning techniques were used, as summarized in Table 5. These techniques can be classified into five main categories: supervised, unsupervised, reinforcement learning, neural network, and deep reinforcement learning.
Summary of machine learning algorithms for UAV path planning.

Supervised learning
Chen et al. 155 introduced a novel method based on Support Vector Machine (SVM). In a three-dimensional complex environment, the robustness of the SVM model was tested. The outcomes of the simulation showed that SVM creates a safe and smooth flight path as it approaches obstacles.
Muñoz et al. 156 proposed an approach which combines Gaussian Process (GP) regression model and the Fast Marching Square (FMS) method to develop an informative path planning and exploration algorithm. Based on the conducted tests, the weights were assigned to each method, and then the mean absolute error (MAE) and predictive variance were calculated. Testing the proposed algorithm in a real environment demonstrated its effectiveness compared to traditional methods, such as the Boustrophedon approach, by providing a more accurate depiction of the environment.
Alos and Dahrouj 157 proposed a hybrid approach, called Dynamic Linear Regression with K-Nearst Neighbor (DLR-KNN) for optimizing UAV path planning by addressing contextual faults within the UAV system. Dynamic Linear Regression is used for estimating the values of a focused attribute, while K-Nearst Neighbor is employed to classify the estimation error values into “Normal” and “Abnormal” categories. Experimental results proved that DLR-KNN outperformed K-Means and One-Class SVM algorithms in terms of detection rate, accuracy, and false alarm rate.
Radmanesh et al. 158 proposed a decentralized approach using a partial differential equation (PDE) to create collision-free 3D routes for multiple UAVs operating in common airspace. The suggested approach was compared with centralized and sequential planning techniques. Test findings showed that the partial differential equation (PDE) outperformed Mixed Linear Programing (MILP) in terms of path length and execution time.
Unsupervised learning
Pierre et al. 159 suggested an enhanced Kohenen’s Self-Organizing Map (SOM) approach using a combination of competitive learning with particle physics to develop an optimal trade-off solution for UAV multi-objective path planning. Three scenarios were used in a 3D environment to evaluate the performance of the enhanced SOM method. The outcomes showed that the proposed SOM can effectively avoid obstacles and escape falling into local minima.
Tartaglione and Ariola 160 suggested a novel decentralized path planning method based on the leader-follower technique and Quality Threshold Clustering (QT clustering) algorithm to generate collision-free 2D paths for multiple UAVs working in unknown environment. By simulating different scenarios, the results demonstrated the effectiveness of the proposed technique, as the UAVs successfully completed the flight mission while avoiding collisions with obstacles throughout their trajectory.
Reinforcement learning
Chen et al. 161 suggested multi-agent reinforcement learning for optimizing multi-UAV path planning using a centralized training–decentralized architecture (CTDE). A long short-term memory (LSTM) layer was added to the proximal policy optimization (PPO). The experimental findings showed that the proposed algorithm significantly enhanced the performance and overcame the problem of making-decision with incomplete information.
Sonny et al. 162 suggested a Q-learning algorithm to efficiently plan the path of UAVs in an environment containing both static and dynamic obstacles. The performance of the proposed approach was evaluated in terms of learning time and path length. The results showed that the proposed algorithm minimizes the total distance traveled by the UAV when compared to other approaches.
Yan and Xiang. 163 proposed an improved Q learning algorithm (IQL) for solving the UAV path planning problem in unknown environment. This paper introduces a new action selection strategy that combines the ε-greedy strategy with the Boltzmann strategy, as well as a novel Q-function initialization method, to enhance the algorithm’s performance. The simulation results proved that IQL algorithm outperformed the classical Q learning algorithm in terms of learning efficiency, path length and search performance.
Wang et al. 164 proposed an improved reinforcement learning algorithm to enhance the optimization of UAV path planning for unknown complex 3D environments. Three anti-collision avoidance strategies experiments, including a fight path opposing collision, a pursuit collision, and a cross collision, were conducted to evaluate the efficacy of the developed APPA-3D algorithm. The results validate the APPA-3D algorithm’s effectiveness in terms of collision avoidance. As an additional experiment, authors conducted a comparative analysis between APPA-3D and two groups of algorithms: classical algorithms (APF, RRT, and A*) and Q-learning-based algorithms (such as DFQL, IQL, and MEAEO-RL). The finding demonstrated the effectiveness of the proposed algorithm in terms of path length and computation time.
Neural network
Shiri et al. 165 proposed a neural network-based opportunistic Hamilton-Jacobi-Bellman (oHJB) approach for solving the remote UAV online path planning problem. The performance of oHJB was assessed using one base station and one UAV flying at a fixed altitude under wind constraints. Experimental results showed that oHJB gives better performance compared to other neural network-based algorithms in terms of path length, traveling time, and energy consumption.
Chhikara et al. 166 proposed a deep convolutional neural network (DCNN). Furthermore, genetic algorithms are utilized in CNN hyperparameter tuning. Experimental results demonstrated that the suggested algorithm gives better performance compared to the 11 state-of-the-art peer-to-peer deep neural networks.
Akshya et al. 167 developed a hybrid approach by combining deep neural networks (DNNs) with the Adam optimization algorithm for optimizing the UAV path planning. The performance of the proposed approach was evaluated by conducting experiments using different activation functions, including tanh, sigmoid, and ReLU. In the following, each generated trajectory is evaluated based on key metrics such as Mean Squared Error (MSE), Mean Absolute Error (MAE), Root Mean Squared Error (RMSE), and R-squared (R2). The results showed that the Adam-optimized DNN model outperformed the other activation functions in terms of path accuracy and smoothness.
Deep reinforcement learning (DRL)
Li and Wu. 168 proposed an enhanced DDPG algorithm for object avoidance and target tracking using an actor-recurrent-critic (ARC) architecture. The state of environments is approximated using long short-term memory networks. A predefined reward function based on the line of sight and an artificial potential field is designed so that the UAV can effectively maintain target tracking and avoid obstacles.
Zhang et al. 169 suggested a deep reinforcement learning algorithm based on LSTM networks to solve the problem of real-time path planning for UAVs. LSTM networks are used in this algorithm as Q-value networks for the deep Q network (DQN) algorithm, which makes the decision of the Q-value network has some memory. The simulation results showed that compared to traditional feed-forward neural networks (FNN), the RPP- LSTM proposed in this paper is significantly more accurate and robust than other real-time path planning algorithms.
Authors in this reference 170 proposed a deep reinforcement learning approach called Deep-State action reward state action (Deep-Sarsa) algorithm, which integrates classical Sarsa and neural networks to solve the problem of multi-UAV path planning. The performance of Deep-Sarsa technique was tested in a ROS-Gazebo simulation platform. The results demonstrated that Deep-Sarsa algorithm can offer a dependable path for UAVs, ensuring collision-free navigation.
Xi and Liu. 171 developed a novel reinforcement learning (RL) training scheme based on DDPG for optimizing the UAV path planning. The testing of the proposed method, conducted in three phases, aimed at ensuring the UAV could reach its targets, avoid obstacles, and improve flight efficiency. Experimental results demonstrated the effectiveness of the proposed method compared to the synchronous RL training scheme and RRT* algorithm.
Yan et al. 172 proposed an enhanced dueling double deep Q-networks (D3QN) algorithm. The performance of the improved (D3QN) technique was evaluated in dynamic and static environments. Experimental results proved that the D3QN algorithm outperformed DDQN and DQN in terms of path safety, reward accumulation, and success rate.
Critical analysis
Different machine learning-based UAV path planning algorithms were presented to show that these methods are able to manage complex dynamic environments. But still, these algorithms face several challenges, like high computational costs and long training time, which could become a barrier to convergence and stability. Table 6 provides a summary of machine learning (ML) techniques used in UAV path planning, detailing their applications along with their advantages and limitations.
Advantages and disadvantages of machine learning algorithms.

The limitations of ML algorithms have motivated researchers to propose a variety of methods, including hybrid algorithms,183,184 adaptive strategies,185,186 and novel improved ML algorithms.187,188 Generally, three forms of hybridization in machine learning for UAV path planning can be identified: combining traditional algorithms with machine learning, for example, a combination of RRT with DQN. 58 RRT is popular due to its simplicity, robustness, and low computational time, but the limitation of the RRT method includes being a random sampling based. DQN is computationally expensive, difficult to tune, and not robust but offers adaptability in complex and dynamic environments. This integration enables the researchers to exploit advantages of both methods and eliminate the limitations of each technique. The second approach is integrating various machine learning algorithms; for instance, PPO is integrated with CNN and LSTM networks 189 to improve the convergence speed and increase the efficiency of avoiding collisions in complex environments. Finally, machine learning techniques are combined with computational algorithms, such as using an enhanced Gray Wolf Optimizer (GWO) for a viable solution for multi-UAVs in 3D environments, combined with reinforcement learning to guide the exploration and exploitation processes and enhance convergence speed. 190 Researchers also investigated the use of adaptive methods; Shi et al. 191 introduced an Adaptive Dimensionality Reduction (ADR) framework, which incorporates Autoencoders (AEs) and Principal Component Analysis (PCA) to improve data processing efficiency and accuracy in Multi-Agent Reinforcement Learning (MARL). Finally, enhanced machine learning algorithms are also being created to overcome the limitations of standard ML methods. For example, Gong et al. 192 used the Bayesian optimization method to enhance the learning efficiency, convergence speed, and policy stability of the traditional multi-agent deep deterministic policy gradient (MADDPG) algorithm for multi-UAV path planning. Wang et al. 193 proposed a Double Deep Q-Network (DDQN)-based algorithm for optimizing UAV path planning and conducted a comparative analysis with several reinforcement learning algorithms, including PPO, DQN, Q-learning, and Dueling DQN. The simulation results proved that DDQN and Dueling DQN exhibited better convergence performance and more stable learning behavior compared to PPO and DQN. The traditional DQN algorithm suffered from training instability due to overestimation. In contrast, PPO performed better than Q-learning but was limited by its lack of experience replay and high sensitivity to hyperparameters. Q-learning was the worst-performing algorithm. This is due to the fact that Q-learning requires storing every state-action pair’s value function, which can be enormously difficult in high-dimensional state space. Table 7 shows a collection of research studies that address problems in machine learning algorithms.
Recent improvements in machine learning algorithms for UAV path planning.

Hybrid algorithms
Due to the diverse strengths and weaknesses of different path planning algorithms, researchers frequently investigate the integration of various algorithms in order to address their individual shortcomings and exploit their advantages, leading to the creation of hybrid algorithms. Using hybrid approaches, UAV route planning challenges can be met with greater robustness and effectiveness by combining different algorithms’ strengths. Typically, several methods of hybridization exist. This paper categorizes hybridization methods into three types: Traditional with Computational intelligence (TCi), Traditional with Machine learning (TMl), and Computational intelligence with Machine learning algorithms (CiM), as summarized in Table 8.
Summary of hybrid algorithms for UAV path planning.

Traditional with computational intelligence (TCi)
Girija and Joshi 201 developed a novel technique by integrating particle swarm optimization (PSO) with APF algorithm to solve the problem of multi-UAVs path planning. The performance of the proposed algorithm was tested in a 3D dynamic environment with static and dynamic obstacles and a multi-UAV system. Simulation results demonstrated that PSO-APF algorithm generates collision-free paths, even in the presence of multiple obstacles, and performs better than the conventional PSO algorithm in terms of speed and path cost.
Arantes et al. 202 developed a hybrid technique, called Hybrid Genetic Algorithm (HGA), which is based on the combination of GA and Visibility Graph for solving the UAV path planning problem. The effectiveness of HGA was evaluated in a 2D non-convex environment using static obstacles distributed in 50 maps. Simulation results proved the effectiveness of HGA compared to CSA 212 and CPLEX 213 in terms of path length efficiency and running time optimization.
Poudel and Moh 203 suggested a hybrid path planning (HPP) technique by combining the probabilistic roadmap (PRM) algorithm and optimized artificial bee colony (ABC) algorithm to ensure effective data collection and avoid collisions for UAVs in emergency situations. In this method, the Probabilistic Roadmap Method (PRM) is employed to create the shortest and collision-free path, while an optimized artificial bee colony (ABC) technique is utilized to address various path constraints in a 3D environment. Based on simulation results, the proposed HPP performs noticeably better than the PRM and traditional ABC schemes in terms of path length, energy consumption, flight time, and convergence time.
Balasubramanian et al. 204 proposed a hybrid approach, called modified ant colony optimization-MEA*, based on the combination of MACO and memory-efficient A* algorithm (MEA*) to find an energy-efficient optimal path while effectively avoiding obstacles in a 3D environment. Experimental results showed that the proposed algorithm outperforms MACO-A* in terms of path length, execution time, and energy consumption.
Traditional with machine learning approaches (TM)
Li et al. 205 suggested a global-local hybrid algorithm that integrates the A* algorithm and Q-learning for optimizing the UAV path planning. In this method, the improved A* algorithm is used for global static planning, while the modified Q-learning technique is employed for local dynamic path adjustment for UAVs. The simulation results demonstrated that the proposed algorithm effectively addresses the challenges of UAV path planning.
Thangaraj and Sankar Sangam 206 proposed a hybrid approach using artificial neural network for solving the UAV path planning problem, while obstacles are avoided by using artificial potential field (APF). In comparison to the state-of-the-art methods. Simulation results showed that the proposed method performs more effectively.
Kong et al. 207 proposed a hybrid path planning algorithm (B-APFDQN) based on the hybridization of optimized Deep Q-Network (DQN) with Artificial Potential Field (APF) to address the UAV path planning problem. Experimental results showed that the proposed (B-APFDQN) algorithm outperforms the classical DQN in terms of path length and convergence time.
Su et al. 208 hybridized Voronoi Diagrams and Q-learning algorithms for solving the multi-UAVs path planning problem in complex environments, with Voronoi Diagrams used to build a model that incorporates various obstacles within the UAVs operational area, and an enhanced Q-learning algorithm to improve path decision-making. Experimental results showed the performance of the suggested technique compared to the PSO algorithm and the original Q-learning in terms of path length efficiency and collision avoidance.
Computational intelligence with machine learning approaches (CiM)
Qu et al. 209 hybridized GWO and reinforcement learning model for solving the UAV path planning problem. The performance of RLGWO was simulated in three case studies inside a 3D area with the presence of eight static obstacles. The experimental results demonstrated the effectiveness of RLGWO in a complex environment.
Xia and Zhang. 210 proposed a hybrid approach, called Gaussian multi-objective particle swarm optimization-QL algorithm (GMOPSO-QL), based on the combination of PSO with Q-learning algorithm for solving the constrained UAV path planning problem. In this paper, the Gaussian distribution is also introduced to generate new particles, and the effectiveness of the GMOPSO-QL algorithm was evaluated in a 3D environment. The simulation results showed that GMOPSO-QL outperforms both MOPSO and GMOPSO, demonstrating its effectiveness and robustness in achieving a safe and smooth path for UAVs.
Yuting et al. 211 developed a hybrid approach, called SA-MAXQ based on the combination of MAXQ hierarchical reinforcement learning method with Simulated Annealing (SA) for solving the multi-UAV path planning problem. Experimental results proved the superiority of SA-MAXQ compared to standard MAXQ, Q-learning algorithm, and ε-Q-learning algorithm in terms of convergence, time consumption, and search steps.
Ablation discussion on hybrid algorithms
In order to understand the role of individual components in hybrid algorithms more clearly, an ablation analysis is valuable and was conducted by comparing hybrid models to the original single-method algorithms. For instance, the hybrid approach (PSO+APF), presented by Girija and Joshi 201 performed better than individual PSO, particularly in scenarios with high obstacle density and moving obstacles. When tested individually, the original PSO demonstrated the advantage of strong global search capability and reduced computational steps but struggled in complicated spaces. On the other hand, APF achieves fast local obstacle avoidance through modeling attractive and repulsive forces but is prone to getting stuck in local minima. Their integration successfully enhances the deficiencies of the two constituents: PSO’s global optimization defeats APF’s local traps, while APF enhances PSO’s convergence speed. Similarly, in the hybrid method suggested by Li et al., 205 an improved A* algorithm was combined with Q-learning. In this approach, global path planning was solved using the modified A* algorithm and the local dynamic path planning was handled by the modified Q-learning algorithm. Although A* has the advantage of being capable of planning globally optimal trajectories efficiently in static environments, it lacks the flexibility to adapt to dynamic or unexpected changes during the flight. Conversely, Q-learning is capable of dealing with local adaptations, but is plagued by slow convergence and inefficiency in large or complicated state spaces. By combining these two techniques, the authors realized a balanced solution that minimizes planning time, path complexity, and cost, while guaranteeing stable and efficient UAV path planning. As a third example from the CiM category, Qu et al. 209 proposed the Reinforcement Learning-based Gray Wolf Optimizer (RLGWO), which integrates the capabilities of RL and the GWO to enhance four search strategies: exploration, exploitation, geometric adjustment, and optimal adjustment. Ablation results showed that compared to the original GWO and its improved variants (IGWO, MGWO, and EEGWO), the RLGWO algorithm outperformed them in generating viable and efficient routes, particularly in complicated environments.
Conclusion
Path planning stands as a pivotal challenge in deploying UAVs across diverse domains. In order to tackle this problem, this article provides a comprehensive overview of intelligent algorithms for UAV path planning, as proposed by a number of researchers in recent years through publications in major journals, and conference proceedings. It starts with a review of objectives and constraints of UAV path planning and then a brief discussion of classical approaches, followed by an analysis of the limitations and complexity of traditional methods that justify the shift toward intelligent techniques. These are divided into three classes: computational intelligence, machine learning techniques, and hybrid approaches. Each category has been divided into several subcategories. Further analysis of these categories reveals the pros and cons of each algorithm type, along with its applicability to diverse UAV path-planning scenarios. This paper has also pointed out recent developments in overcoming the limitations of these algorithms and has thus provided a foundation for the development of robust and efficient solution techniques for UAV path planning. As a result, future research should focus on adaptive path planning strategies that can respond to real-time changes, uncertainties, and dynamic environments, particularly with increasing complexities in real-world scenarios. In such conditions, the choice of a powerful and adaptive algorithm is crucial for computing an optimal, collision-free route between source and destination to ensure safe flight and overall mission success.
Footnotes
Handling Editor: Divyam Semwal
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.