
Abstract
The enhancement of automobile quality is a significant area of modern research and development, with a focus on improving ride comfort and driving experience. This is achieved not only through structural improvements but also through the optimization of suspension control strategies. To enhance the ability of online real-time adjustment and overcome the limitations of fuzzy control, this study combines dung beetle optimizer (DBO), Fuzzy control, and Proportional-Integral-Derivative (PID) control to propose a reduced optimization complexity control method to improve MR damper control. The control parameters generated by fuzzy control are utilized as the initial values for DBO iteration to obtain the optimal solution, which is subsequently fed into the PID controller to regulate changes in the actuator’s magnetic field. Use MATLAB/Simulink to build a quarter semi-active suspension model with magnetorheological (MR) dampers for simulation analysis. Under sinusoidal and random disturbances, compared with the passive suspension, the vehicle acceleration of the Fuzzy-DBO-PID controller is reduced by 51%, 50.82%, 47.56% and 11.42%. Compared with Fuzzy-PID, the vehicle acceleration of Fuzzy-DBO-PID is reduced by 25.98%, 32.86%, 29.41%, and 7.19% on sinusoidal and random disturbances, which improves the ride comfort and verifies the effectiveness of the proposed control strategy.
Keywords
Introduction
Vehicles driving on the road produce vibrations by the road profile. To ensure driving safety, stability and comfort, passive suspension, active suspension, and semi-active suspension are developed. 1 Passive suspension is cheap and simple in structure, but mechanical fixation cannot adjust the suspension damping. 2 Active suspension achieves vibration control by generating force through actuators. The disadvantages are complex structure, high cost, and increased system energy. 3 Semi-active suspension uses actuators to adjust the damping of the suspension system. Compared with active suspension, it is lower in cost, simpler in structure, and consumes less energy. Therefore, it is widely used in the automotive industry.4,5
Semi-active suspensions typically use MR dampers as actuators. These dampers adjust the damping of the suspension system by applying a magnetic field. 6 When a magnetic field acts, the particles in the MR fluid are ordered and the fluid changes from a liquid to a semi-solid or solid state, thereby changing the damping. When the magnetic field is removed, the particles become disordered and the fluid returns to the liquid state.7,8 Due to its adjustable damping, fast response speed, low energy consumption, and low cost, it is widely used in automobiles, 9 construction, 10 medical equipment, 11 and other fields. 12 However, MR dampers have highly nonlinear and hysteretic behavior, which attracts researchers to study control strategies for MR dampers.13,14
The PID controller is a commonly used control method in modern industry. However, the parameters of the PID controller cannot be adjusted in real time, which has poor effect on the nonlinear control system. Some studies use Fuzzy control, Sliding Mode Control to adjust PID control parameters. 15 Hu fed back the road disturbance and seat vertical speed to the fuzzy PID and adjusts the control parameters in real time to achieve vibration reduction of the suspension system. 16 The expert knowledge established by Fuzzy control has the limitations of individual experts, making it difficult to effectively handle real-time and uncertain situations. Fuzzy PID is combined with sliding mode control, 17,18 Meta-heuristic algorithms,19,20 and neural networks 21 to solve the above problems. Sun combined fuzzy control and sliding model control to build an adaptive collaborative control system to improve the stability of the maglev train suspension and the dynamic coupling of multiple electromagnets. 22 Liu used the quantization factor and scaling factor of the PSO optimized fuzzy PID controller to control the manipulator with high precision and strong stability. 23 Li adapted the particle swarm optimization algorithm to solve the optimal solution of the initial value of the fuzzy PID controller to improve control accuracy and reduce vibration interference. 24
The proposal of these control methods enriches the suspension control strategy, but these control methods have multiple optimization parameters and are relatively complex to calculate, or only optimize the initial control parameters, reducing the control effect. Meta-heuristic algorithms have excellent fast iteration and solving capabilities and can effectively obtain optimal control parameters.
A novel online collaborative control strategy, combining Fuzzy, DBO, and PID controllers, is proposed for semi-active suspension damping control using an MR damper. In this approach, the control parameters generated by Fuzzy control are used as initial values for DBO optimization. Through iterative processing, the optimal control parameters are determined and applied to the PID controller to regulate the MR damper, effectively achieving semi-active suspension vibration reduction. This strategy has the following advantages: first, there are less optimization parameters, and three parameters Kp, Ki, and Kd are optimized. Second, Fuzzy control optimizes the initial value, and DBO speeds up optimization and avoids local optimal solutions. Third, make up for the limitations of Fuzzy control expert knowledge. Fourth, Fuzzy control and DBO adjust control parameters online in real time based on error feedback. Build a quarter car 2DOF suspension model and Spencer’s Modified Bouc–Wen model of the MR damper in MATLAB/Simulink. The proposed controller is tested and analyzed with passive suspension and Fuzzy-PID controller on sinusoidal road surfaces with amplitudes of 2 cm, 6 cm, and 10 cm and ISO8608 random road surfaces to verify the vibration reduction capability of the proposed controller.
The structure of this study is as follows: Chapter 1 introduces the literature research on semi-active suspension control, and Chapter 2 provides a theoretical introduction to quarter semi-active suspension, MR damper, and DBO model. Chapter 3 establishes a suspension system simulation model in MATLAB/Simulink. Chapter 4 conducts simulation and results analysis. Chapter 5 is the conclusion.
Suspension model and DBO algorithm
Quarter car model with semi-active suspension
A 2DOF quarter car with semi-active suspension is used to analyze the vertical dynamics of the vehicle, including sprung mass, unsprung mass, and MR damper, as shown in Figure 1.

Quarter car semi-active suspension.
According to Newton’s second law, the research model equations are as follows 25 :


This suspension model satisfies the assumptions: the suspension spring stiffness and tyre stiffness are linearly related within the operating range; the tyre is always in contact with the ground. The displacements of the different parts for the suspension system start from a static equilibrium state.
MR damper model
At present, non-parametric models and parametric models are mainly used to describe the magnetorheological damper mechanical model. Parametric modeling uses a combination of damping elements, elastic elements, and mechanical elements to equivalently describe the MR damper performance. Since the parametric model is relatively simple, many parametric models describing MR damper have been developed such as Bingham model, 26 Bouc-Wen model, 27 Spencer and Dyke, 28 and modified Bouc-Wen model. 29 This study uses Spencer’s Modified Bouc–Wen model, 30 because this model connects a viscous damping unit in series and a spring element in parallel to the Bouc-wen model (Figure 2), which solves the phenomenon of hysteresis characteristics and provide better fit to experimental data.

Spencer’s modified Bouc–Wen model. 29 .
Specific equations are:







where
DBO model
The dung beetle optimizer (DBO) algorithm is a smart swarm algorithm proposed in 2022 based on the living habits of dung beetles, which is derived from the four related activities of dung beetles: ball rolling, reproduction behaviors, foraging, and stealing. This algorithm includes five position update rules (rolling, dancing, foraging, reproduction behaviors, and stealing). It has the advantages of high solution accuracy, fast speed, and few parameters. 31 It is now used in mechanical design, 32 data prediction, 33 path planning, 34 and construction. 35
Ball-rolling dung beetle
Animals in nature generally have a habit of storing food, and dung beetles are no exception. The dung beetle rolls the dung ball to the ideal position through the guidance of celestial clues (especially the sun and various polarized lights), and the mathematical model of the dung beetle’s position update when rolling is:


where t is the number of dung beetle position iterations, xi(t) is the position parameter of the
When the dung beetle is blocked and unable to continue moving in the original direction, it stands on a dung ball and rotates, described as dance behavior, to search for a new rolling direction. The dung beetle position iteration formula is:

where θ∈[0, π] denotes the deflection angle. When θ equals 0, π/2 or
Spawning dung beetles
The dung beetle rolls dung balls to a suitable site and stores them underground, and the female dung beetle spawns in the dung balls. Dung balls serve as breeding sites for dung beetles and provide food for dung beetle larvae. A boundary strategy is proposed based on simulating spawning area selection.


In the formula, Lb* and Ub* are the lower and upper bounds of the spawning area respectively, X* denotes the local optimal position of the current iteration, R = 1-t/Tmax, and Tmax is the set maximum iteration number. Lb and Ub correspond to the lower and upper bounds of the optimization problem respectively.
After determining the spawning area, female dung beetles spawn in the selected area, with each female dung beetle producing only one egg per iteration. The boundary range of the spawning area and position of the brood ball are dynamic during the iteration process.

Where Bi(t) is the position parameter of the i-th brood ball at the t-th iteration, b1 and b2 are two independent random vectors of size 1 ×dim, and dim is the dimension of the problem.
Foraging dung beetles
Mature dung beetle larvae emerge from burrows to search for animal dung. The best foraging range for small dung beetles is established using the DBO algorithm.


Where XB is the global best position in the current iteration and Lbb and Ubb are the lower and upper bounds of the optimal foraging area, respectively. The formula for updating the position of foraging dung beetles is as follows:

where xi (t) is the position information of the i-th foraging dung beetle at the
Stealing dung beetles
It is common for dung beetles to have their dung balls stolen or snatched away by their species. Xb is the global optimal location for obtaining food, assuming that the surrounding location of Xb is the best place to compete for the dung balls. The update rule for the stealing dung beetle is:

where xi (t) is the position parameter of the i-th stealing dung beetle at the t-th iteration, S is a constant value, g is a random vector of size 1×dim and follows a normal distribution. The total number of dung beetles is set to 30, and the numbers of the four types of dung beetles are 6, 6, 7, and 11.
Figure 3 shows the flow chart of the DBO algorithm. First, the dung beetle population is randomly initialized in the search space, and relevant parameters are defined. Then the fitness value of the individual is calculated. Finally, iterations are repeated until the maximum number of iterations is reached and the global optimal solution is obtained.

Flow chart of the DBO algorithm.
Establish suspension system simulation model
In modern industry, after the product or research plan is determined through simulation, physical testing is conducted to verify it, which is more targeted. Therefore, simulation testing has the advantages of reducing expenses, saving time, and repeating testing compared with physical testing. The content of this section is to establish a semi-active suspension control system in MATLAB/Simulink.
Establish quarter car suspension simulation model
Based on the theoretical formulas in Section 2.1, the 2DOF semi-active suspension simulation model is established in Simulink. The data in Table 1 are suspension system parameters.
suspension system parameters.

Establish MR damper simulation model
According to the relevant equations of Spencer’s modified Bouc-Wen model in Section 2.2, the MR damper model is established in Simulink. The actuator is a MR damper (RD-8041-1) produced by Lord Company. Gao fits its parameters based on experiments and verifies the accuracy and effectiveness of the parameters (Table 2). 36
Parameters for Spencer’s modified Bouc-Wen model.

Establish Fuzzy-PID control system
Fuzzy logic control has two inputs: error and error change rate. The vehicle body displacement and its derivative are applied to these two inputs, respectively. For Fuzzy logic control, the fuzzy rules designed based on expert experience usually consist of (H, M, and L), (NB, NS, Z, PS, PB), and (NB, NM, NS, Z, PS, PM, PB). “H” is High, “M” is Medium, “L” is Low, “N” is negative, “B” is big, “M” is medium, “S” is small, “Z” is zero, and “P” is positive. The selection of membership functions in fuzzy rules in this paper is based on computational efficiency, complexity, and inference mechanism. Although increasing the number of membership functions enhances output accuracy, it exponentially increases the number of calculations, leading to longer computation times and reduced real-time performance. Common membership functions include triangular, Gaussian, and trapezoidal functions. The triangular function is the quickest to compute as it involves only linear calculations, while the Gaussian and other nonlinear functions are more computationally complex. In fuzzy inference, each rule requires matching the input values with the membership degrees of the rule conditions, followed by calculating the rule’s aggregation degree, weighted average, or other subsequent processes. The more rules there are, the longer the inference takes.37, 38 When a car is driving, suspension vibration needs to be quickly controlled. Therefore, H, M, and L are used to construct the fuzzy rule table (Table 3). 20 The output parameters Kp, Ki, and Kd are divided into three levels: H, M, and L.
Fuzzy control rules.
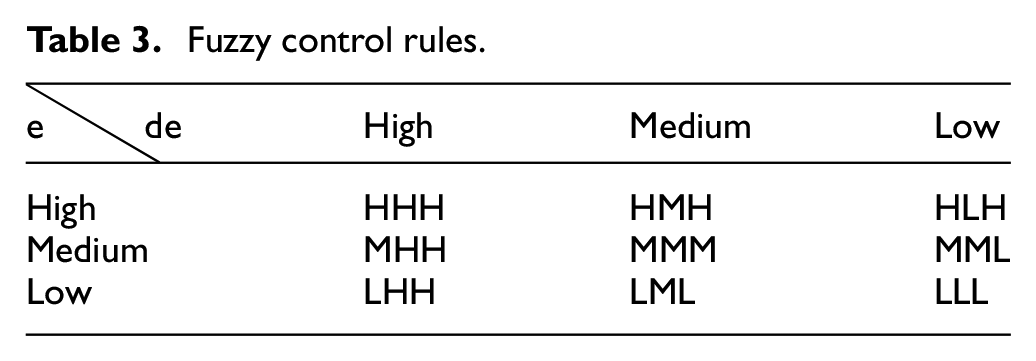
Figure 4 illustrates the Fuzzy controller. The membership function type is “Trimf,” fuzzy inference system uses “Mamdani” and defuzzification uses “centroid.” Fuzzy logic control outputs the control gains (Kp, Ki, Kd) of the PID controller. Fuzzy control first fuzzifies the input variables, and then obtains the output Fuzzy control based on the inference of fuzzy rules. The specific form of Fuzzy control according to fuzzy rules:


Fuzzy control controller.
Finally, the fuzzy results are defuzzified using “centroid” to obtain specific Fuzzy control parameter values.
The road profile causes vehicle vibration, and the vehicle body displacement and its derivative are input into the Fuzzy controller as the error and error change rate, and then the gains of the PID controller is output according to the inference and defuzzification of fuzzy logic. The PID controller adjusts the magnetic field strength of the magnetorheological damper according to the gains, and the damping of the semi-active suspension changes accordingly to achieve real-time vibration reduction. The membership ranges of the two inputs (e, de) are determined by the ranges of the passive suspension body displacement and its derivatives, and the quantization factors (GE, GCE) are used to adjust two inputs of different amplitudes to the membership range.
Establish Fuzzy-DBO-PID control system
The Fuzzy-DBO-PID controller performs online collaborative control. This controller is composed of the Fuzzy-PID controller and the DBO algorithm. The DBO population is 30, iteration is 500 times, the population dimension is set to 3 (Kp, Ki, and Kd), and the boundary range is [0, 100]. The fitness function of DBO is denoted by the integral absolute error of the sprung mass displacement, and the optimization goal is to obtain the optimal solution with the smallest fitness value.
DBO is initialized to obtain 30 initial populations, and the first population is selected to compare the fitness value with the output control parameters of the Fuzzy controller. If the output control parameters are better than the first population, the output control parameters replace the first population. Otherwise, the first population is retained. Then iterate the selected population according to the five position update rules (rolling, dancing, foraging, reproduction behaviors, and stealing) in Section 2.3 to obtain the optimal solution. The optimal solution is input into the PID controller, which changes the magnetic field of the magnetorheological damper and adjusts the damping of the semi-active suspension system to achieve online real-time vibration reduction. The above entire process continues to cycle while driving. The DBO algorithm iterates the control parameters to find the optimal solution, which quickly and effectively corrects the Fuzzy control error and improves the accuracy of online control.
Simulation and analysis
Simulation test plan
MATLAB/Simulink (MathWorks, R2022a, Massachusetts, USA) software is adopted to test the performance of the Fuzzy-DBO-PID controller on 2DOF suspension damping. Computer parameters: DELL Inspiron 7590, i7-9750H CPU, 2.60 GHz, and Windows 10. Parallel simulation tests three suspension model solutions: 1. Passive suspension model, 2. Fuzzy-PID control suspension model, 3. Fuzzy-DBO-PID control suspension model. Road disturbance adopts sinusoidal disturbance and random disturbance. Sinusoidal disturbance with amplitudes of 2 cm, 6 cm, and 10 cm and the frequency is 1 Hz. Random disturbances use ISO8608 random road profile and is processed with white noise. 39 The Class B road profile is selected, and the vehicle traveling speed is 20 m/s (Figure 5). In view of the hysteresis of fuzzy input, the average value of the error value of ei, ei-1 and the error value of ei-1, ei-2 is collected and added to ei to obtain the predicted fuzzy input error ei+1. 40

Random road profile.
Three objectives are utilized to evaluate the impact of different control methods on suspension performance. a). Ride comfort. According to the ISO2631-5:2018 standard, the root mean square (RMS) of body acceleration (BA) denotes the ride comfort performance of vehicles (equation (20)). The larger the RMS, the worse the comfort of the occupants. b). Suspension travel (ST). If the suspension travel is too large, it may cause the shock absorber to exceed its movement range, thereby reducing the vehicle’s driving safety performance. Suspension travel is denoted by the RMS of the difference between the sprung mass displacement and the unsprung mass displacement, as expressed in equation (21). c). Tyre deflection (TD). It is used to describe the ability of the wheels to maintain contact with the road. The large tyre deflections that cause instability and reduced comfort when driving. The RMS of tyre deflection is denoted by the difference between the tyre displacement and the road displacement excitation response (equation (22)). 41
a). RMS of body acceleration

b). RMS of suspension travel

Where,
c). RMS of tyre deflection

Result analysis
Sinusoidal road profile simulation
Figure 6 shows the time response simulation results of body acceleration, suspension travel and tyre deflection at sinusoidal road profiles. The test results on sinusoidal road profiles can be clearly observed: Regarding the control response speed to vibration, the Fuzzy-DBO-PID controller surpasses the Fuzzy-PID controller and passive suspension, achieving the fastest response to suspension vibration. For the amplitudes of body acceleration, suspension travel, and tyre deflection, the Fuzzy-DBO-PID controller is lower than the Fuzzy-PID controller, which, in turn, is lower than passive suspension, except for the body acceleration and tyre deflection in the initial adjustment phase. The histogram visually compares the stable peak values of body acceleration, suspension travel and tyre deflection and describes the differences in the optimization degree of the three control strategies at different amplitudes. The above shows that the proposed control method effectively controls suspension vibration, improves ride comfort, ensures safe suspension travel, and reduces the impact of road contours on tyres.

Time response and stable peak values of body acceleration, suspension travel, and tyre deflection on different sinusoidal road surfaces: (a) Amplitude 2 cm, (b) Amplitude 6 cm, and (c) Amplitude 10 cm.
Table 4 describes the simulation result statistics of sinusoidal road profiles. On sinusoidal roads with amplitudes of 2 cm, 6 cm, and 10 cm, the Fuzzy-DBO-PID controller significantly reduces the RMS of body acceleration (51.87%, 50.82%, and 47.56%), suspension travel (89.12%, 83.57%, and 73.82%) and, tyre deflection (48.44%, 47.54 %, and 44.59%) relative to passive suspension. The Fuzzy-DBO-PID controller reduces the impact of the road profiles on the suspension system and significantly improves the suspension performance. The Fuzzy-DBO-PID controller has better statistics on suspension performance indicators than the Fuzzy-PID controller. As the amplitude increases, the RMS of body acceleration decreases by 25.98%, 32.86%, and 29.41%, respectively. The optimization of suspension travel and tyre deflection is obvious, so the Fuzzy-DBO-PID controller has a better effect on suspension damping control. In summary, the Fuzzy-DBO-PID controller effectively improves suspension damping performance, handling stability, and driving experience on sinusoidal road profiles.
Suspension performance RMS for sinusoidal road profile.

Random road profile simulation
The random road profile simulates the regular road that most vehicles usually travel on, and its amplitudes are small. Figure 7 indicates that the Fuzzy-DBO-PID controller has a better control effect in suspension vibration reduction than passive suspension and Fuzzy-PID controller. The Fuzzy-DBO-PID controller’s curves for these three objectives are in the minimum range most of the time.
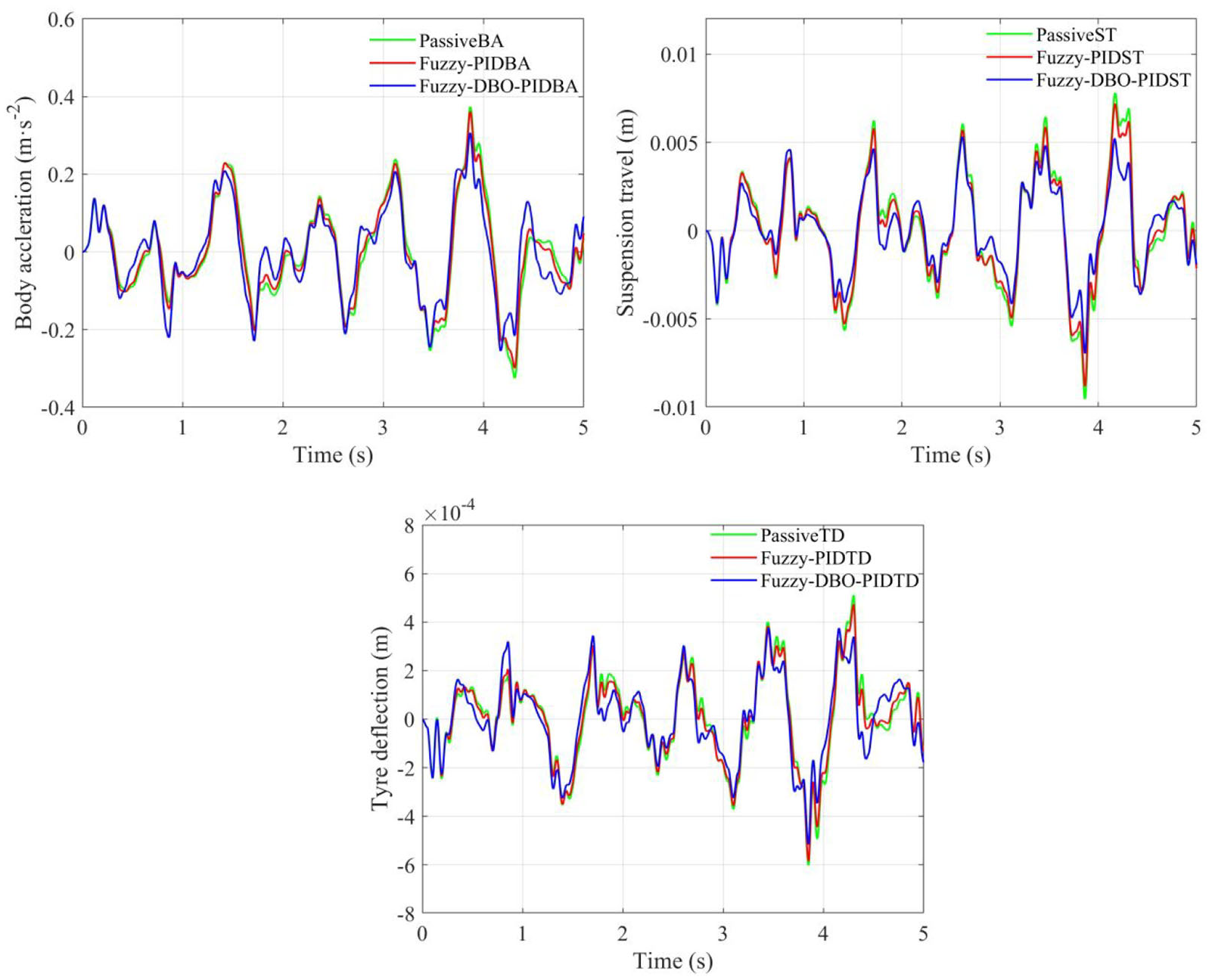
Time response of body acceleration, suspension travel and tyre deflection for random road profile.
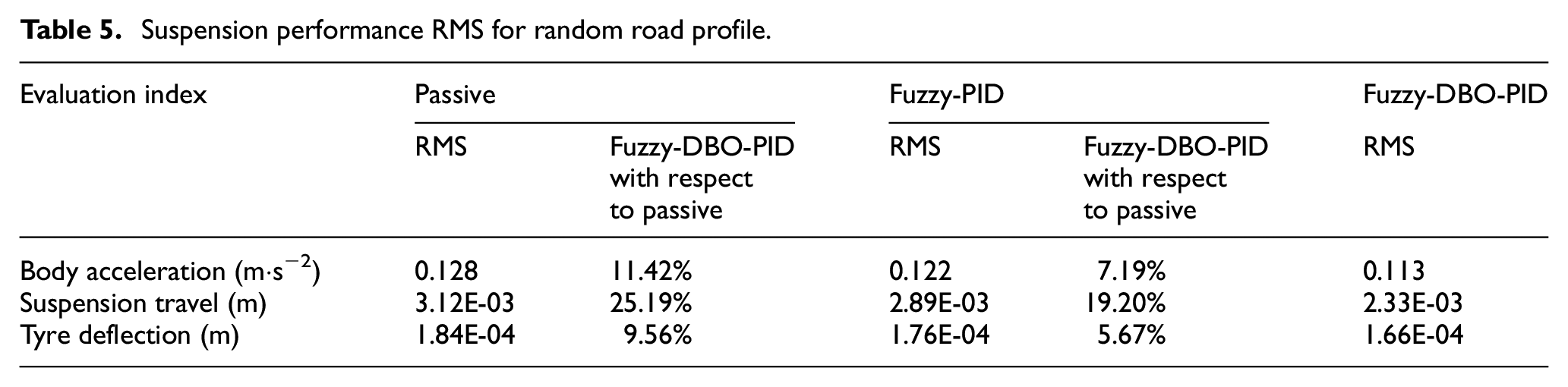
The simulation results of random road profile in Table 5 indicate that the Fuzzy-DBO-PID controller reduces the RMS of body acceleration (11.42%, 7.19%), Suspension travel (25.19%, 19.20%), and tyre deflection (9.56%, 5.67%) for passive suspension and Fuzzy-PID controller. From the above analysis, the Fuzzy-DBO-PID controller proposed in this study is better than the passive suspension and Fuzzy-PID controller in terms of suspension damping on random road profile.
Suspension performance RMS for random road profile.
Frequency domain analysis
According to the ISO2631-5:2018 standard, the RMS of body acceleration is the evaluation index of ride comfort. Ride comfort is the purpose of this study, so the frequency domain analysis of body acceleration is carried out. On the same road profiles, the body acceleration of the frequency domain analysis shows the same trend as the body acceleration of the time domain analysis. The periodogram power spectral density (PDSD) of the Fuzzy-DBO-PID controller is smaller than that of the Fuzzy-PID controller, and the PDSD of the passive suspension is the largest. It can be seen that the road profiles have the least impact on the body of the Fuzzy-DBO-PID control, which also shows the effectiveness of the Fuzzy-DBO-PID controller in the vibration reduction of the semi-active suspension (Figure 8).

Frequency responses of body acceleration on different road profiles for Passive, Fuzzy PID, Fuzzy-DBO-PID.
Conclusion
This paper combines a Meta-heuristic algorithm and Fuzzy-PID control to propose a new online collaborative semi-active suspension control strategy. Fuzzy logic provides initial values for DBO optimization to speed up the optimization process and avoid local optimal solutions. The iteration of DBO to obtain the optimal solution eliminates the limitations of fuzzy logic expert knowledge. Both use their own strengths to make up for each other’s weaknesses. Verification analysis through quarter suspension model testing shows that Fuzzy-DBO-PID significantly reduces body acceleration, suspension travel and tyre deflection compared to passive suspension and Fuzzy-PID suspension. The ride comfort on sinusoidal roads increased by 50.08% and 29.42% on average, respectively. The ride comfort on random B-class road increased by 11.42% and 7.19%, respectively. Meta-heuristic algorithms face challenges such as susceptibility to local optima, parameter sensitivity, and difficulty in balancing global and local searches. Future improvements to DBO could include integrating hybrid algorithms, developing enhanced parameter adaptation mechanisms, and incorporating reinforcement learning. In addition to semi-active suspension vibration reduction control, this strategy can be applied to aspects such as robot motion, aircraft attitude, and building vibration reduction.
Footnotes
Acknowledgements
The authors would like to thank Universiti Putra Malaysia (UPM) and the Malaysian Ministry of Higher Education (MOHE) for their continuous support in the research work.
Handling Editor: Sharmili Pandian
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by the Geran Putra Inisiatif (GPI) fund (GPI/2024/9794100). The authors wish to extend their thanks to the Bagui Scholars Program of Guangxi Zhuang Autonomous Region under Fund (No. 2019A08), and Guangxi University Young and Middle-aged Teachers’ Scientific Research under Fund (No. 2024KY0447).