
Abstract
This paper is dedicated to the fundamental research of the mechanical model of a 1/4-vehicle semi-active suspension system with time-delayed state feedback control during wheel vertical displacement. The strategy combining the “equivalent harmonic excitation” optimization algorithm with the particle swarm optimization algorithm is proposed in this paper. Through the optimization and solution of time-delayed feedback control parameters of the 1/4 vehicle semi-active suspension system, the dynamic response of the vehicle suspension system before and after parameter optimization is studied. The research results indicate that, compared to passive control, time-delayed feedback control of wheel vertical displacement can significantly improve the smoothness, handling stability, and safety of vehicle operation.
Keywords
Introduction
To effectively mitigate various vibrational excitations from the road surface and enhance both vehicle handling stability and ride comfort, contemporary vehicles primarily achieve vibration reduction through the optimized design of vehicle suspension and seat suspension systems. 1 The goal is to attain superior damping effects. Consequently, the design of high-quality vehicle suspension systems and seat suspension systems has become a focal point for researchers in current vehicle design.
Compared to traditional passive suspensions, semi-active vehicle suspensions offer advantages such as simple structure, lower cost, good reliability, and control effectiveness approaching that of active suspensions.2–4 This makes them have broad prospects for application. However, at the same time, they introduce challenges such as higher energy consumption and control system time delays. 5 However, in active and semi-active control systems, time delay is an inherent and unavoidable phenomenon. If the time delay of the system is not taken into account during the design process, it can significantly degrade the performance of the control system and may even lead to system instability.6–9
In recent years, as numerous scholars in the field have conducted in-depth research on time delay issues, a consistent finding has emerged: time delay also possesses advantages such as broadening the effective vibration reduction frequency bandwidth, improving system control performance, and even enhancing system stability. In other words, appropriate time delay can have a positive impact on control systems.10,11
From the perspective of effectively utilizing time delay, Olgac et al. initially proposed the concept of “time-delayed linear dynamic absorber.” This absorber can be real-time adjusted for feedback gain coefficients and time delay by analyzing the external excitation frequency. 12 Through subsequent extensive research literature by Olgac and Sipahi and their team,13–20 it is evident that analyzing the external excitation frequency for real-time adjustments of the absorber’s feedback gain coefficients and time delay can effectively control the vibration of the primary system. Moreover, it offers advantages such as good vibration reduction performance.
Currently, research on time-delay feedback control in semi-active suspension systems predominantly centers around the mechanical models of 1/4 or 1/2 vehicle semi-active suspension systems. These models incorporate time-delay state feedback control based on vehicle body or wheel delays. Scholars in the field focus on optimizing and determining optimal values for feedback gain coefficients and time delays under various road excitations. The comparison of vehicle vertical acceleration amplitudes before and after the implementation of active time-delay feedback control serves as an indicator of improvements in ride comfort.
In their study, Gai and Mingxia 21 explored a 2-degree-of-freedom 1/4 vehicle semi-active suspension model employing vehicle speed time-delay state feedback control. They utilized a genetic algorithm to optimize the structural parameters and control gains of the suspension system. The optimization results reveal a 22.7% reduction in the vibration amplitude of the optimized vehicle’s vertical acceleration under specific system delays, highlighting the effectiveness of the control strategy based on vehicle speed time-delay feedback in enhancing the suspension system’s output performance. Qu et al. 22 developed a dynamic model for a 1/2 vehicle semi-active suspension system grounded in wheel vertical displacement time-delay state feedback control. Using a particle swarm optimization algorithm, they determined feedback gain coefficients and time delays. Results from the optimization showcase significant enhancements, with the root mean square values of the vehicle’s vertical acceleration and pitch acceleration in the semi-active suspension system reduced by 15.10% and 22.48%, respectively, compared to a passive suspension system under random road excitation. In a related analysis, Yan et al. 23 delved into the damping performance of a 1/4 vehicle suspension system under optimal time-delay feedback control, accompanied by a discussion on the impact of time delay on the control stability of active suspension systems. Simultaneously, Liu et al. 24 constructed a 1/4 vehicle suspension model based on time-delayed state feedback control of vehicle vertical acceleration. Their optimization, targeting the minimum amplitude of vehicle vertical acceleration, demonstrated a substantial reduction (at least 19.60%) in vibration amplitude under harmonic road excitation compared to the pre-optimized state.
In summary, from the perspective of utilizing time delay, it is entirely feasible to widen the effective vibration reduction frequency band of a semi-active vehicle suspension system and enhance the time-delayed vibration reduction effects under road excitation by introducing appropriate active time delays. This can be achieved by adjusting the combination relationship between feedback gain coefficients and time delay. However, the majority of current studies on the time-delayed vibration reduction control effectiveness of semi-active vehicle suspension systems suggest that, while these systems demonstrate relatively good vibration reduction performance under simple harmonic road excitations, their effectiveness is generally poor under random road excitations. Additionally, there is a widespread issue of conflicting performance evaluation metrics within vehicle suspension systems. Therefore, further exploration is needed to effectively improve the overall vibration reduction performance of vehicle suspension systems and optimize designs to enhance various performance evaluation metrics for vehicles.
Based on the research analysis of the aforementioned issues, this paper constructs a mechanical model for a 1/4 vehicle semi-active suspension system based on time-delay state feedback control. Through the optimization design of the optimal values for time-delayed feedback control parameters in the vehicle’s semi-active suspension system, it is possible to further improve the overall vibration reduction performance of the semi-active suspension system and effectively enhance the driver’s ride comfort, among other factors.
Mechanical model of time-delayed vibration control in vehicle semi-active suspension systems
Physical model of time-delayed vibration attenuation control in a three-degree-of-freedom semi-active suspension system for vehicles
To streamline the research, the modeling process omits the consideration of unbalanced forces stemming from the vehicle’s own factors, such as the engine and transmission, and their impact on body vibration. The primary emphasis is placed on investigating the vertical vibration caused by road irregularities. Furthermore, the model neglects the pitch and roll motions of the vehicle body. 25 The mechanical model of the three-degree-of-freedom 1/4 vehicle semi-active suspension system, based on time-delayed state feedback control, is depicted in Figure 1.
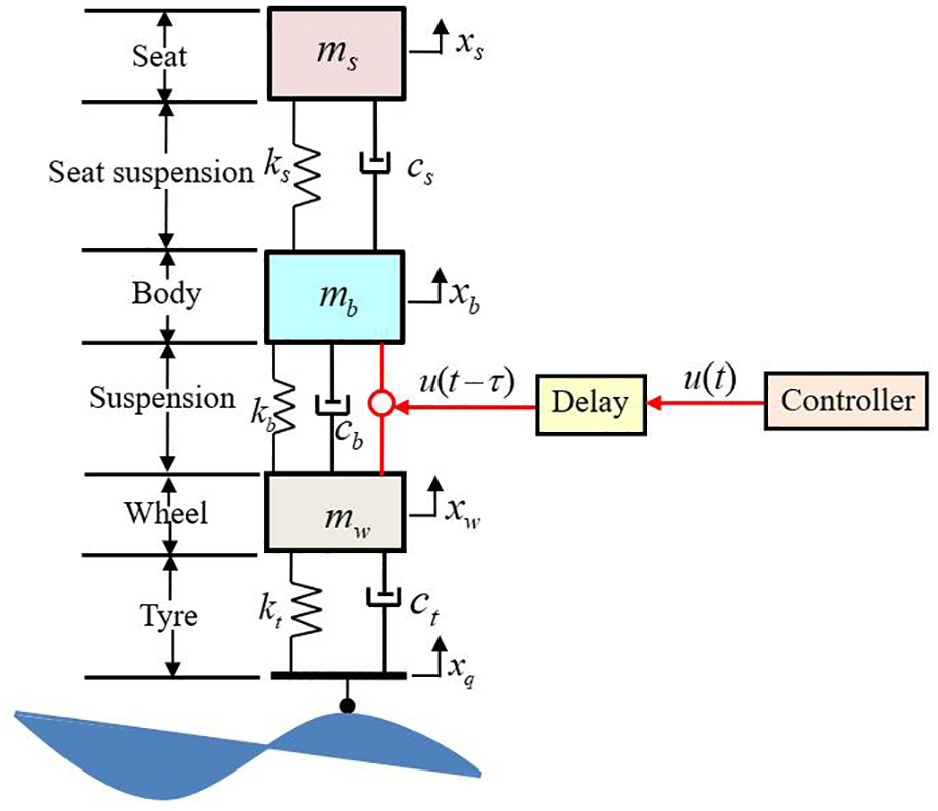
Mechanical model of three degree of freedom 1/4 vehicle semi-active suspension system.
The refined physical model of the 1/4 vehicle suspension system, illustrated in Figure 1, encompasses one degree of freedom for vertical seat vibration, one for vertical body vibration, and one for vertical wheel vibration. The specific parameters for the three degrees of freedom in the 1/4 vehicle suspension system can be found in Table 1.
Model parameters of 1/4 vehicle suspension system.

Mathematical model of time-delayed vibration attenuation control in a quarter-car semi-active suspension system with three degrees of freedom
Utilizing the physical model of the vehicle’s semi-active suspension system with time-delay feedback control, illustrated in Figure 1, the coordinate origin is established at the equilibrium positions of the seat, vehicle body, and wheels. By employing Newton’s second law, the motion differential equations for the 1/4 vehicle semi-active suspension system based on time-delay state feedback control are then formulated.
The vertical motion equation for the seat

The vertical motion equation for the vehicle body

The vertical motion equation for the wheel

If the time-delay state feedback control target for the vehicle’s semi-active suspension system is set as the wheel, the time-domain expression for the control force with time-delay based on the wheel’s vertical displacement, denoted as “

Now, the motion differential equations (1)–(4) of the 1/4 vehicle suspension system based on the delayed state feedback control of wheel vertical displacement are simplified. This is represented as a matrix equation.

The characteristic roots of equation (5) are denoted as s. After undergoing Laplace transformation, the equation can be expressed as

Defining

In equation (7), “

Optimization of time-delayed feedback control parameters for a semi-active suspension system in vehicles
Optimize the objective function
In the optimization of time-delayed state feedback control parameters for the semi-active suspension system of a vehicle, our objective is to minimize the dimensionless magnitude-frequency characteristic function of the vehicle’s vertical acceleration within the effective vibration frequency range. 26 Throughout the optimization process of the time-delayed feedback control parameters in the vehicle’s semi-active suspension system, our primary goal is to minimize the vibration magnitude of the vehicle’s vertical acceleration within the effective frequency range. This effort is directed at maximizing the fulfillment of the smoothness requirements during vehicle travel. Consequently, the objective function is defined as follows:

Where
Here, (gw, τw) are variables chosen to minimize the vertical acceleration vibration amplitude of the vehicle body within the effective frequency range. The constraints on the time-delay state feedback control parameters (gw, τw) are set as

Optimization of time-delayed feedback control parameters
In the context of optimizing time-delayed feedback control parameters for semi-active suspension systems in vehicles, a time-domain model is utilized, generated through the harmonic superposition method applied to random road surface excitations. The vehicle is assumed to traverse a Class C road surface at a speed of v = 60 km/h. The time-domain model for random road roughness is depicted by equation (10).

In the equation, xq(t) represents the temporal random displacement of the road surface, Δf denotes the interval of time frequency, Gq(fmid−j ) signifies the coefficient of road surface roughness, fmid−j indicates the central frequency of the interval, θj represents the random phase angle uniformly distributed in the range of (0,2π), and t denotes the travel time.
Considering the constraints outlined in equation (9) for time-delayed feedback control parameters, an equivalent harmonic excitation method27–29 is proposed to formulate a particle swarm optimization algorithm with J(gw,τ w ) serving as the fitness function, as presented in equation (8).
To further expand the application of the semi-active suspension system in vehicles, which employs time-delayed state feedback control based on wheel vertical displacement, especially under the influence of random road excitations, we aim to enhance both the damping bandwidth and damping effectiveness. In this context, the frequency domain expression of the vehicle body’s vertical acceleration due to the vertical displacement input from the road surface, denoted as
Building upon the previously outlined optimization strategy for time-delayed feedback control parameters, a randomized particle swarm optimization algorithm was employed. In this process, 200 particles were randomly selected for iterative optimization. The outcome of this optimization effort yielded the optimal values for the time-delayed feedback control parameters within the effective vibration frequency range for the vehicle’s semi-active suspension system, denoted as “

Amplitude-frequency characteristic curve of vertical acceleration of vehicle body based on time-delay state feedback control of wheel vertical displacement.
Regarding the optimization results for the time-delayed feedback control parameters within the effective vibration frequency range for the vehicle’s semi-active suspension system, specified as “
(1) The frequency-domain simulation curve of the vehicle body’s vertical acceleration in Figure 2 reveals noteworthy observations. In comparison to a vehicle equipped with a passive control suspension system, the semi-active suspension system based on time-delay state feedback control consistently exhibits higher vibration amplitudes at various frequencies within the effective vibration frequency range. Specifically, at frequencies fmid-j = 0.25 · j+0.125, where j = 1,2,3,…,59, the vibration amplitudes surpass those of the passive suspension system. This difference is particularly evident at resonance frequencies, where the semi-active suspension system’s vibrations become more severe, resulting in a diminished control effect. It implies that certain time-delay intervals may amplify the vibration amplitudes of the vehicle body’s vertical acceleration, highlighting potential inadequacies in the selection of time-delayed feedback control parameters.
(2) The frequency-domain simulation analysis results in Figure 2 highlight the influence of wheel vertical displacement time-delay state feedback control on the semi-active suspension system. At f =6.6250 Hz, the amplitude of the vehicle body’s vertical acceleration increases from 0.9261 (under passive control) to 1.0147 (with time-delayed feedback control). Conversely, at f =6.3750 Hz, the amplitude rises from 0.9182 (under passive control) to 1.2561 (with time-delayed feedback control). Notably, 0.9261 and 1.2561 represent the peak values of the vehicle body’s vertical acceleration for the passive and semi-active suspension systems across the entire frequency range. Consequently, the damping efficiency relative to passive control is −35.63%. This underscores that the introduction of time-delay results in instability in the semi-active system, emphasizing the necessity of avoiding adjustments that place the time-delay in unstable intervals during practical application.
In response to the issue of inadequately reasonable selection of time-delayed feedback control parameters based on wheel vertical displacement, an attempt is being made to improve the amplitude-frequency characteristics of the vehicle body’s vertical acceleration by adjusting the time-delay magnitude. To achieve this, it is necessary to re-optimize and determine the optimal values for the time-delayed feedback control parameters. The optimization plan is outlined as follows:
(1) Suppose the constraint range for the time-delayed feedback control parameters in a semi-active suspension system based on wheel displacement is as follows:

(2) In accordance with the constraints outlined in (11), a combined strategy utilizing the equivalent harmonic excitation method and particle swarm optimization algorithm is employed. This involves the random selection of 200 particles for iterative optimization, with the aim of obtaining the optimal values for the time-delayed feedback control parameters within the effective vibration frequency range for a semi-active suspension system based on wheel vertical displacement. The resulting optimal parameters are determined as “(gwop, τwop) = (4210.8 N/m, 0.3507 s).”
Furthermore, Figure 3 illustrates the amplitude-frequency characteristic curve for the vehicle body’s vertical acceleration under the optimal time-delayed feedback control within the effective vibration frequency range.
(3) The frequency-domain simulation results illustrated in Figure 3 reveal that, compared to passive control, the semi-active suspension system employing wheel vertical displacement time-delayed feedback control reduces the vibration amplitude of the vehicle body’s vertical acceleration from 0.9261 (under passive control) to 0.5743 at f = 6.6250 Hz. Notably, 0.9261 and 0.5743 represent the vibration peaks for the passive suspension system and the semi-active suspension system based on wheel vertical displacement time-delayed feedback control across the entire frequency range. Consequently, the damping efficiency is calculated at 37.9873%. This indicates that, relative to passive control, the wheel displacement time-delayed feedback control effectively mitigates the amplitude of the vehicle body’s vertical acceleration, signifying a substantial enhancement in the damping performance of the automotive suspension system.

The amplitude-frequency characteristic curve of the vehicle body’s vertical acceleration, based on time-delay damping control of the wheel’s vertical displacement at τ = 0.3507s.
Stability analysis of time-delay in vehicle semi-active suspension systems
To ensure the stable operation of a semi-active suspension system employing state feedback control based on wheel vertical displacement delay, it is crucial to determine the optimal values for delay feedback control parameters. The stability analysis of the vehicle’s semi-active suspension system, incorporating delay state feedback control related to wheel vertical displacement, is conducted using Maple programs and frequency domain scanning stability theory.30–32 This analysis yields the delay stability intervals for the vehicle’s semi-active suspension system. The process of delay stability analysis unfolds as follows:
Firstly, by employing equation (7), the characteristic equation of the vehicle’s semi-active suspension system based on wheel displacement delay state feedback control can be derived. These equations are expressed as follows:

According to the Routh-Hurwitz criterion, a necessary condition for the stability of the system is that all the characteristic roots of equation (12) have negative real parts. The critical condition for system instability is when the characteristic roots of the equation are purely imaginary, that is, s = iω. Therefore, by substituting s = iω and the optimal values of the delay state feedback control parameters based on wheel vertical displacement into the characteristic equation (11), and then separating the real and imaginary parts of the characteristic equation, the following expression is obtained:

Based on the optimal value of the delay feedback control parameter (gwop = 4210.8 N/m) for the semi-active suspension system with wheel vertical displacement delay state feedback control, the Maple program computations yield the following expressions for zw(s), Pw(s), and Qw(s) in equation (13).

Next, in the presence of the polynomial Lw(s) =Pw(s)/Qw(s), equation (13) can be expressed equivalently as

Substituting the Maple-program-computed expressions for Pw(s) and Qw(s) into equation (14), we can derive the relationship between the magnitude
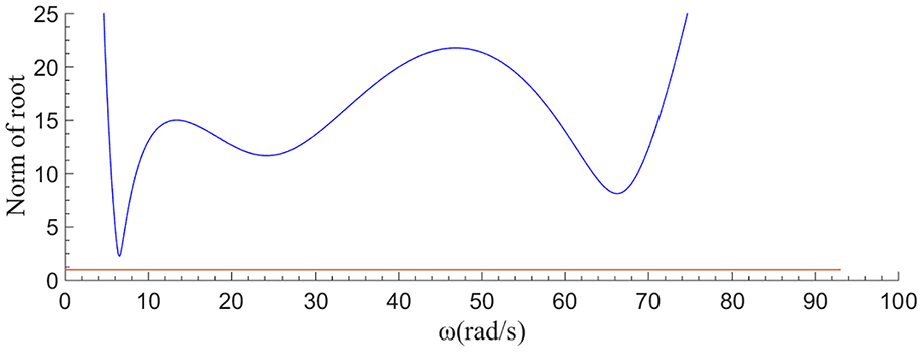
Modulus of complex root of characteristic equation of vehicle semi-active suspension system with time-delay state feedback control of wheel vertical displacement.
Lastly, perform calculations to determine the crossover frequency ωw and the corresponding critical delay value τw for the semi-active suspension system based on wheel vertical displacement delay state feedback control in the vehicle.
From the analysis depicted in Figure 4, it is evident that the magnitude |z| = 1 of the complex roots of the characteristic equation for the vehicle’s semi-active suspension system, governed by wheel displacement delay state feedback control, does not intersect with the frequency ω (in radians per second). In simpler terms, there is no crossing frequency ωw (rad/s). Consequently, it can be concluded that when gwop= 4210.8 N/m and τwop∈(0.0001 s, 1 s), the semi-active suspension system of the vehicle is stable under all delay conditions.
Time-domain simulation analysis and validation
To validate the accuracy of the optimized parameters for time-delayed feedback control, it is essential to conduct numerical simulation analyses using the optimal values of these parameters. Through the application of a numerical simulation analysis method, various performance indicators of the vehicle’s semi-active suspension system will be systematically examined. The objective is to elucidate the impact of time-delayed feedback control parameters on the comprehensive vibration reduction performance of the vehicle suspension system. Furthermore, this analysis aims to assess the effectiveness of the control strategy based on wheel vertical displacement time-delay state feedback.
Time-domain simulation under the influence of random road excitation
Opting for a Class C road surface irregularity as the excitation for the system, and considering the optimal delay feedback control parameters “
The simulation results include time-domain response curves for various performance evaluation indicators of the vehicle’s semi-active suspension system under random road excitation, as well as the time-domain response curve for seat vertical acceleration, as depicted in Figure 5.

Time domain simulation curve of various performance evaluation indexes of seat vertical displacement time-delay state feedback control: (a) seat vertical acceleration, (b) body vertical acceleration, (c) suspension dynamic stroke, (d) tire dynamic displacement, and (e) body vertical displacement.
As observed in Figure 5, the post-optimized vehicle demonstrates substantial improvements in performance metrics, including vertical acceleration of the body, suspension travel, and tire displacement, when compared to the pre-optimized state. This signifies a notable enhancement in the comprehensive vibration damping performance of the vehicle’s suspension system following the optimization.
Simulation and discussion of time-domain responses under random road excitation
The simulation results presented in Table 2 for the vehicle’s semi-active suspension system and the seat suspension system (with the seat suspension being passively controlled) under the influence of random road excitation reveal:
(1) Compared to the passive control suspension system, the semi-active suspension system based on wheel vertical displacement delay state feedback control notably diminishes the amplitude of seat vertical acceleration. The corresponding root mean square (RMS) value decreases from 93.007 μm/s2 in the passive control scenario to 2.1151 μm/s2 with wheel vertical displacement delay state feedback control, achieving an optimization efficiency of 97.7259%. This significant reduction markedly enhances the comfort of the driver during vehicle operation.
(2) Comparison to the passive control suspension system, the semi-active suspension system based on wheel vertical displacement delay state feedback control substantially diminishes the amplitude of body vertical acceleration. The corresponding root mean square (RMS) value decreases from 292.57 μm/s2 in the passive control scenario to 3.0829 μm/s2 with wheel vertical displacement delay state feedback control, achieving an optimization efficiency of 98.9463%. This noteworthy reduction significantly improves both the smoothness of vehicle motion and overall ride comfort.
(3) In contrast to the passive control suspension system, the semi-active suspension system based on wheel vertical displacement delay state feedback control notably reduces the amplitude of suspension travel. The corresponding root mean square (RMS) value decreases from 2.8121 μm in the passive control scenario to 1.4820 μm with wheel vertical displacement delay state feedback control, achieving an optimization efficiency of 47.2987%. This significant reduction not only lowers the probability of impact with limit-stop mechanisms, thereby enhancing ride comfort, but also contributes to the improved safety of the vehicle chassis.
(4) Compared to the passive control suspension system, the semi-active suspension system based on wheel vertical displacement delay state feedback control markedly diminishes the amplitude of tire displacement. The corresponding root mean square (RMS) value decreases from 2.6927 μm in the passive control scenario to 1.4438 μm with wheel vertical displacement delay state feedback control, resulting in an optimization efficiency of 46.3800%. This substantial reduction effectively enhances tire-to-ground adhesion, leading to a significant improvement in the vehicle’s handling stability.
(5) In contrast to the passive control suspension system, the semi-active suspension system based on wheel vertical displacement delay state feedback control markedly decreases the amplitude of body vertical displacement. The corresponding root mean square (RMS) value decreases from 0.7292 μm in the passive control scenario to 0.2707 μm with wheel vertical displacement delay state feedback control, yielding an optimization efficiency of 62.8758%. This significant reduction contributes to a pronounced enhancement in the smoothness of vehicle motion.
Comparison of root mean square values of various performance evaluation indexes under random excitation of pavement.

In summary, the time-domain simulation analysis of the vehicle’s semi-active suspension system, utilizing wheel vertical displacement delay state feedback control under random road excitation, reveals the following: in comparison to passive control, the time-delayed feedback control of wheel displacement significantly improves ride comfort, handling stability, and vehicle safety, as well as the driver’s comfort during the vehicle’s operation.
Time-domain simulation under the influence of road surface harmonic excitation
In accordance with the central frequency values within each subinterval of the effective frequency range, denoted as fmid-j= 0.25 · j+0.125 for j = (1, 2, 3, …59), and selecting fmid-1 = 0.375 Hz, the road excitation is characterized as harmonic. Specifically, it can be expressed as xq(t) = 0.0123 sin (2πfmid-1t+θ-1), where j and θ-1 represent the subinterval index and phase angle, respectively.
Utilizing the optimal values of delay feedback control parameters (gwop,τ wop ) for the semi-active suspension system, numerical simulation analysis yields the time-domain output response curves for both the vehicle’s semi-active suspension system and seat suspension system under harmonic road excitation, as illustrated in Figure 6. The curves depict the vertical acceleration of the vehicle body and the vertical acceleration of the seat over time.
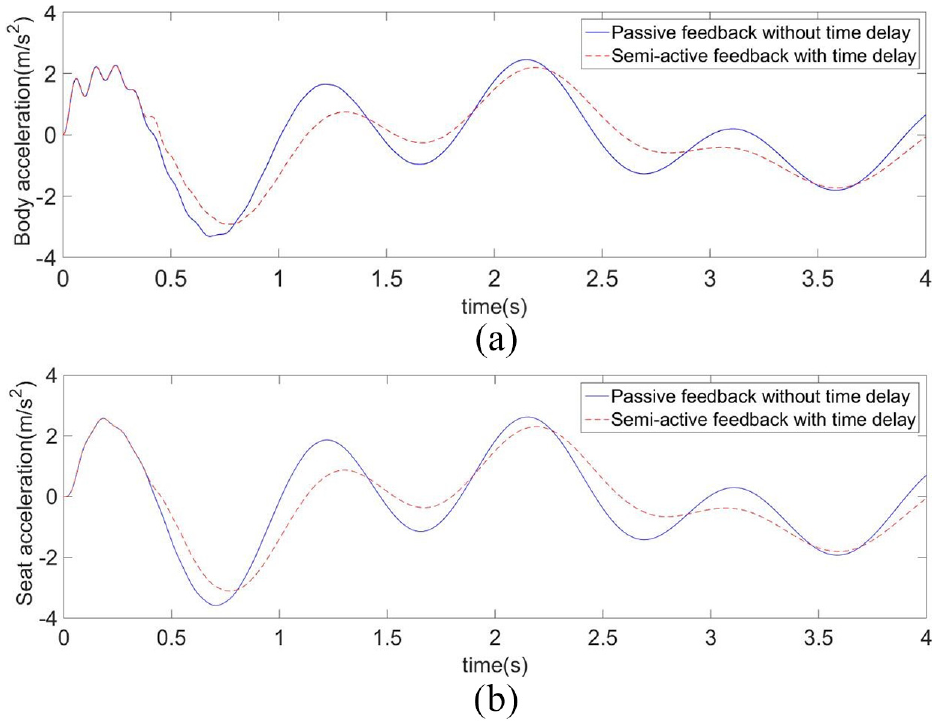
Time domain simulation curve of time-delayed feedback control of wheel vertical displacement: (a) body vertical acceleration and (b) seat vertical acceleration.
Time-domain response simulation results and discussion under road surface harmonic excitation
The simulation results depicted in Table 3 under harmonic road excitation illustrate the vertical acceleration of the vehicle body and the vertical acceleration of the seat as follows:
(1) In contrast to passive control, the root mean square value of the vertical acceleration of the vehicle body decreases significantly, dropping from 1.5702 m/s2 under passive control to 0.3855 m/s2 with wheel vertical displacement delay state feedback control. This represents an optimization efficiency of 75.4499%.
(2) In comparison to passive control, the root mean square value of the vertical acceleration of the seat decreases significantly, reducing from 1.6959 m/s2 under passive control to 0.3969 m/s2 with wheel vertical displacement delay state feedback control. This reflects optimization efficiencies of 76.5970%.
Comparison of the root mean square value of each performance evaluation index between the time-delay state feedback control and the passive control of the vertical displacement of the wheel.

Hence, in comparison to passive control, under harmonic road excitation, delay state feedback control based on wheel vertical displacement significantly diminishes the vibration amplitudes of both the vehicle body’s vertical acceleration and the seat’s vertical acceleration. This contributes to enhancing the smoothness of vehicle motion and ride comfort.
Conclusion
This paper investigates the mechanical model of a 1/4 vehicle semi-active suspension system utilizing wheel vertical displacement delay state feedback control. The optimization objective function is defined as the vertical vibration acceleration of the vehicle body. To optimize the delay feedback control parameters for the semi-active suspension system, a combined strategy incorporating the Equivalent Harmonic Excitation Optimization Algorithm and Particle Swarm Optimization Algorithm is employed. The study also involves analyzing the correlation between delay feedback control parameters and the optimization objective function. Ensuring system stability with delay, the paper conducts numerical simulation analysis and validation on the frequency-response characteristics of the vehicle suspension system within the effective vibration frequency range. Additionally, it assesses the time-domain responses of various performance evaluation indicators for the vehicle’s semi-active suspension system under road excitation. The key conclusions drawn from this study are as follows:
(1) In contrast to passively controlled vehicle suspension systems, semi-active suspension systems based on time-delay state feedback control significantly expand the effective vibration absorption bandwidth of the vehicle’s suspension. This occurs under optimal time-delayed feedback control, markedly improving the amplitude-frequency characteristics of the vehicle’s suspension system within the effective vibration frequency range induced by road excitation.
(2) In contrast to passively controlled vehicle suspension systems, a semi-active suspension system, utilizing time-delay state feedback control, markedly improves driver comfort under optimal time-delayed feedback control. Simultaneously, it enhances the smoothness of vehicle travel, handling stability, and overall safety. This innovative approach effectively resolves historical conflicts among performance indicators in various aspects of vehicle suspension, thus comprehensively elevating the overall performance of the vehicle suspension system.
(3) In comparison to the conventional use of standalone seat semi-active suspension systems or vehicle semi-active suspension systems, the vehicle semi-active suspension system, based on time-delay state feedback control of wheel vertical displacement, effectively resolves inherent conflicts among performance indicators of seat and vehicle suspensions. It achieves a comprehensive optimization design for vehicle time-delayed vibration control, thereby establishing a sound theoretical foundation for optimizing both vehicle suspension systems and seat suspension systems.
Footnotes
Handling Editor: Sharmili Pandian
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study was supported by Basic Research Fund for the Science and Technology Innovation Development Plan of Yantai City, Shandong Province, China (Grant No.2023YT06880519).
Data availability
The data used to support the findings of this study have not been made available so as to ensure the privacy and anonymity of the people involved.