
Abstract
In this paper, the mechanical model of two-degree-of-freedom vehicle semi-active suspension system based on time-delayed feedback control with vertical acceleration of the vehicle body was studied. With frequency-domain analysis method, the optimization of time-delayed feedback control parameters of vehicle suspension system in effective frequency band was studied, and a set of optimization method of time-delayed feedback control parameters based on “equivalent harmonic excitation” was proposed. The time-domain simulation results of vehicle suspension system show that compared with the passive control, the time-delayed feedback control based on the vertical acceleration of the vehicle body under the optimal time-delayed feedback control effectively broadens the vibration absorption bandwidth of the vehicle suspension system. The ride comfort and stability of the vehicle under random road excitation are significantly improved, which provides a theoretical basis for the selection of time-delayed feedback control strategy and the optimal design of time-delayed feedback control parameters of vehicle suspension system.
Introduction
Vehicle suspension system behaves as one of the most important parts of modern automobile, and its vibration isolation performance has an important influence on the ride comfort and driving safety of vehicle. In general, the conventional passive suspension system consists of elastic components and damper with fixed parameters. Although it has the advantages of simple structure and low cost, its structural parameters cannot be automatically adjusted with the complex and changeable external conditions and different driving states of vehicles. The suspension system can achieve the optimal performance only under a specific combination of speed and road conditions. In order to improve the ride performance of the vehicle, industry experts and scholars have continuously developed good performance of active and semi-active suspension system based on the traditional passive suspension system in recent years.1–4 That is, according to the driving condition of the vehicle, the control force is applied to the system through the actuator to achieve the purpose of improving vehicle ride comfort and safety. However, in the control process, due to a series of factors, such as signal acquisition, transmission, controller calculation, actuator actuation delay, and so on, the inherent delay is inevitable; it is found that the time delay has a great influence on the control of the system, which may even lead to the instability divergence of suspension system. Song and Xu 5 investigated the stochastic preview control with time-delay consideration for an active vehicle suspension system with look-ahead sensor; simulation results demonstrated that time delay should be considered in the stochastic preview control of an active suspension system, especially when large time delay exited. If the suspension system with time delay was controlled by the optimal controller designed with no consideration of time delay, instability in responses might occur and the control effects possibly got worse with preview time increase. Kou and Fan et al. 6 designed a kind of the semi-active suspension with electro-hydrostatic actuator (EHA) to improve the ride comfort and stability of the vehicle, which the results show that the EHA semi-active suspension has good damping controllability. However, with the increase of time delay, the “jump vibration” phenomenon happens to the suspension system. In order to improve the control accuracy and stability of vehicle suspension system, most professionals in the industry reduce or eliminate the adverse effects of time delay as much as possible by combining time delay compensation technology with modern control technology.7–9 However, with the in-depth study of time delay by other scholars, it is found that although time delay is an unfavorable factor leading to system instability, it also has the advantages of changing the effective frequency range of saturation control and effectively suppressing the vibration of the main system as an adjustable feedback control parameter.10–13 Olgac and Holm-Hansen 14 first introduced the time-delayed feedback control into the dynamic vibration absorber and proposed the concept of time-delay resonator. The results show that by choosing the appropriate time-delayed feedback control parameters (feedback gain, feedback delay), the delayed resonator can completely absorb the vibration of the main system under harmonic excitation, and the vibration of the main system disappears. Liu and Sun et al. 15 constructed a two-degree-of-freedom vehicle suspension model based on time-delayed feedback control with vertical acceleration of vehicle body, and the PSO algorithm is adopted to study the optimization of time-delayed feedback control parameters of vehicle suspension system under different road harmonic excitation frequencies in finite frequency band. The results show that compared with the passive suspension system, the acceleration amplitude of the vehicle body in the finite frequency band can be reduced by at least 19.6%. Yan and Fang 16 studied a two-degree-of-freedom vehicle suspension system based on time-delayed feedback control of body vertical velocity. Genetic algorithm is used to optimize the structural parameters and control gain of suspension. The optimization results show that under a certain inherent time delay, the acceleration amplitude of the optimized sprung mass is 22.7% lower than that before optimization.
In view of this, from the perspective of the utilization of time delay, it is rare to introduce time delay into the field of vehicle engineering applications, and the key to improve the performance of vehicle suspension control system is to obtain the optimal time-delayed feedback control parameters (feedback gain and feedback delay). However, there are still some problems in the current research based on two-degree-of-freedom vehicle active and semi-active suspension system with time-delayed feedback control, the specific problems are as follows: 1. Usually, only focus on the output response of the vertical acceleration of the vehicle body is taken as the evaluation index of the vibration reduction effect of the vehicle suspension system, but whether the output response of other performance evaluation indexes (suspension dynamic travel and tire dynamic displacement) of the suspension system is also improved is not considered. However, these three kinds of performance are usually contradictory, that is to say, if we want to get better riding comfort, it will usually lead to the reduction of driving stability, Therefore, only taking the output response of the vertical acceleration of the vehicle body as the evaluation index of the vibration reduction effect of the vehicle suspension system, there are some limitations in the evaluation of the comprehensive performance of the vehicle semi-active suspension system based on the time-delayed feedback control. 2. Usually, only focus on the output response of the vertical acceleration of the vehicle body near a resonance frequency point under the optimal time-delayed feedback control is concerned, but there is no accurate understanding of the time-delayed vibration reduction effect of vehicle suspension system in broadband. 3. The road condition of vehicle driving is mainly based on simple harmonic excitation in the form of fixed value. The time-delayed vibration reduction effect of vehicle semi-active suspension system based on time-delayed feedback control under road random excitation is less significant than that under simple harmonic excitation; the reason is that the corresponding optimization objective function is mostly constructed by Fourier transform and frequency-domain transfer function, but the time-varying state of external excitation is not considered in the optimization process of time-delayed feedback control parameters; the time-delayed feedback control parameters obtained by optimization solution are only local optimal values. Therefore, in order to solve the problem of complex time-varying excitation such as external multi-frequency, the general calculation method for solving the appropriate time-delayed feedback control parameters still needs to be further explored.
In this paper, the mechanical model of vehicle semi-active suspension system with two-degree-of freedom based on the time-delayed feedback control with vertical acceleration of the vehicle body is studied. The minimum dimensionless vertical acceleration amplitude is taken as the optimization objective function. Based on the equivalent harmonic excitation and particle swarm optimization (PSO), the optimal value of time-delayed feedback control parameters of vehicle suspension system in finite frequency band is obtained. The time-domain simulation results of vehicle suspension system show that compared with the passive control, the time-delayed feedback control based on the vertical acceleration of the vehicle body under the optimal time-delayed feedback control effectively broadens the vibration absorption bandwidth of the vehicle suspension system. The ride comfort and stability of the vehicle under random road excitation are significantly improved which provides a theoretical basis for the selection of time-delayed feedback control strategy and the optimal design of time-delayed feedback control parameters of vehicle suspension system.
Mechanical model of time-delayed vibration reduction control for vehicle suspension system
In order to simplify the research problem, the vehicle vibration caused by road roughness is mainly studied in this paper without considering the influence of the unbalanced force caused by the engine and transmission system, as well as other factors of the vehicle itself on the body vibration, taking magneto-rheological damper as active control actuator, the time-delayed feedback control of body vertical acceleration is introduced on the basis of vehicle passive suspension. Therefore, the mechanical model of vehicle semi-active suspension system based on time-delayed feedback control of body vertical acceleration is established and the model is shown in Figure 1, and the design parameters of vehicle semi-active suspension system are shown in the Table 1, where mb is the quarter vehicle body mass (sprung mass), mw is the unsprung mass, cb is the damper coefficient of semi-active suspension, kb is the spring stiffness of semi-active suspension, ct is the damper coefficient of tire, kt is the equivalent stiffness of tire, and u(t-τ) is the time-delayed feedback control force between sprung mass and unsprung mass. In addition, where xb is the vertical displacement of sprung mass, xw is the vertical displacement of unsprung mass, xq is the road roughness excitation.
According to the mechanical model of time-delayed vibration reduction control shown in Figure 1, the coordinate origin is selected at the respective equilibrium positions of the wheel and the vehicle body; according to Newton’s second law, the differential dynamic motion equation of the vehicle suspension system can be established. Mechanical model of time-delayed vibration reduction control for vehicle suspension system. Model parameters of vehicle suspension.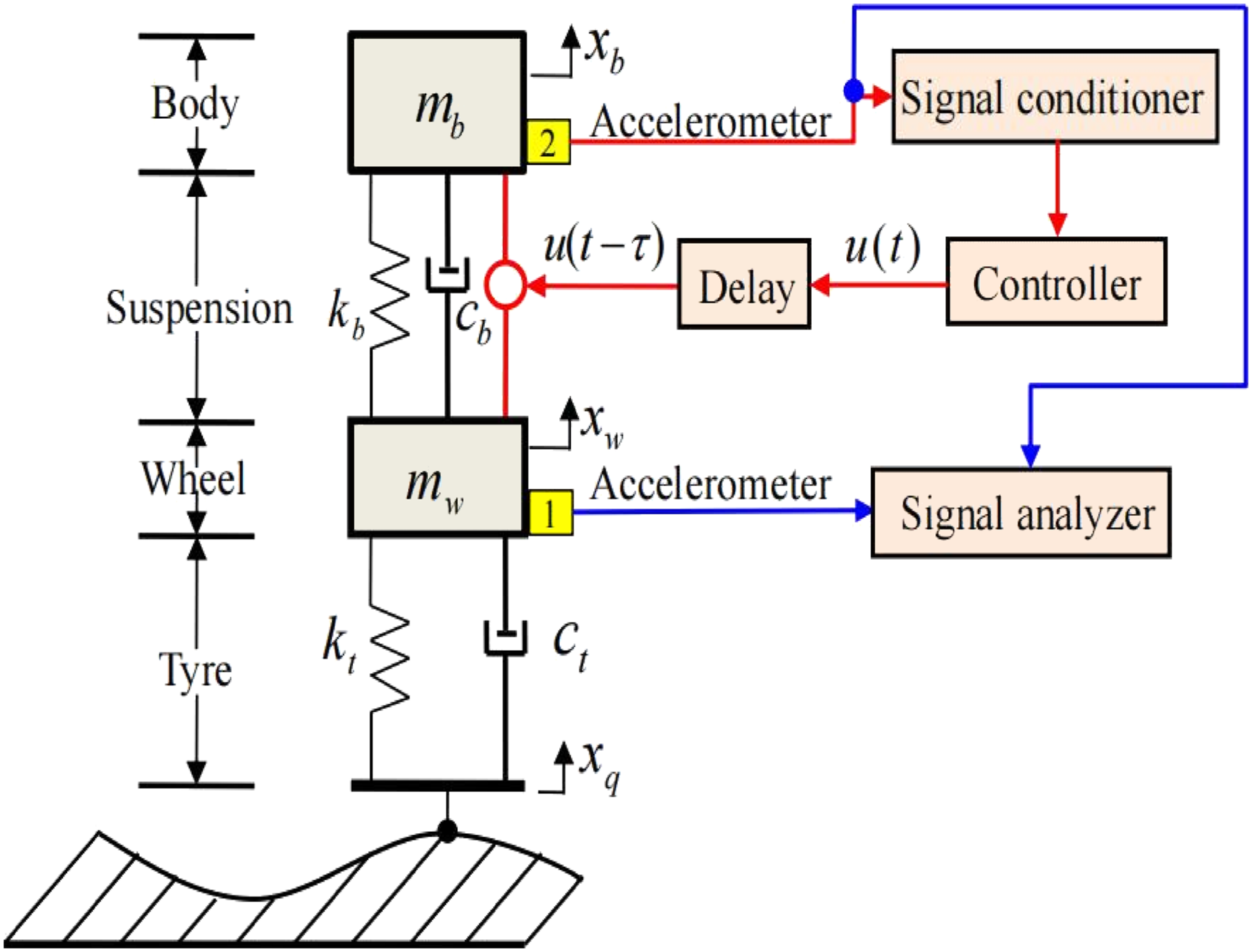

The vertical motion equation of the vehicle body (sprung mass) is shown as 
The vertical motion equation of the wheel (unsprung mass) is shown as
In practical applications, in view of the flexibility of sensor selection, the type of time-delayed feedback (time-delayed feedback control signal) mainly includes the single time-delayed feedback type of displacement,
17
velocity,
18
acceleration,
19
and the combination of them.
20
The time-domain function expression based on the time-delayed feedback control with vertical acceleration of the vehicle body is defined as
The time delay from signal acquisition to input and the time delay of magneto-rheological damper response are the inherent feedback delay of the system, while the active feedback delay is an artificial time delay in the control loop of the suspension, which can be regarded as an adjustable parameter to improve the suspension performance in the control system. When the u(t-τ) disappears, the semi-active suspension system based on time-delayed vibration reduction control will degenerate into a passive suspension vibration reduction system.
Frequency domain response transfer function
Equations (1)–(3) are simplified and identified by matrix equation, and the result can be written as
Let the root of the characteristic equation of equation (4) be s; after Laplace transformation, equation (5) can be obtained as


The transfer function matrix H(s) can be obtained from equation (5)
The frequency response transfer function of vehicle vibration can be obtained by substituting iω for s operator in equation (6)
The selection of optimization objective function and its constraints
For the quarter car model, the vertical acceleration of the vehicle body is an important characteristic to measure the vibration effect of vehicle suspension system. The minimum amplitude of the dimensionless vertical acceleration of the vehicle body in an effective frequency band is taken as performance characteristics;
21
the new objective function J (gb,τb) is established, as shown in equation (8)
The constraint condition is the value range of the feedback gain gb and the feedback delay τb. Obviously, besides that the selection of time-delayed feedback control parameters should meet the requirements of vehicle ride comfort, the output response of suspension dynamic travel and tire dynamic displacement should also be considered. Here, the lower limit 
Parameter optimization of suspension system with time-delayed feedback control
Establishing a reasonable time-domain model of road roughness is one of the most important issues in the follow-up study of vehicle ride comfort and stability. At present, the main methods to simulate road random excitation model at home and abroad are harmonic superposition method, filtered white noise method, Fourier inverse change method, and time series model method. In view of the time-delayed vibration reduction effect of vehicle body under the condition of road harmonic excitation is remarkable, the time-domain model of random road excitation based on harmonic superposition method is selected in this paper.23–24 That is, the road input spectral density is converted into a series of discrete sine waves. The random harmonic superposition algorithm is used to sum the sine wave functions corresponding to each time and frequency cell in the effective frequency band and the sum is expressed as trigonometric functions. The time-domain model of random road roughness as shown in equation (10) can be obtained
As shown in equation (10),
When building the actual pavement model, the parameters that usually need to be selected are the pavement grade roughness coefficient Gq (f), the time frequency interval (f1, f2) and its discrete number k. The selection range of time frequency should include the main natural frequency of vehicle vibration. The division of time and frequency interval should take into account the operation efficiency and the fitting accuracy of given road spectrum.
In this paper, it is assumed that the vehicle travels at a speed of v=60 km/h on the C-class road surface, so the coefficient of road roughness is Gq (f) = 256 × 10−6 m3. In general, the frequency range of vehicle vibration caused by road roughness 25 is about 0.25–15 Hz. When it is lower than 15 Hz, the body motion can be assumed as a simple rigid body motion, while when it is higher than 15 Hz, the dynamic modeling requires an accurate description of the vehicle structure; therefore, the lower limit and the upper limit of the time frequency of the road acting on the tire excitation are taken as f1 = 0.25 Hz and f2 = 15 Hz, respectively. According to the product of time frequency and space frequency f = v⋅n, the lower limit of effective spatial frequency n1 = 0.015 m−1 and the upper limit of effective spatial frequency n2 = 0.9 m−1 of road roughness power spectral density are obtained. In order to avoid frequency aliasing, the sampling interval is set as Δl, Δl ≤ 0.5⋅v⋅f2−1 can be obtained from the sampling theorem. If the number of sampling points is N, the length of simulated road roughness is L = N⋅Δl, and the resolution of sampling spatial frequency is Δn = L−1. In order to ensure the validity of the lower limit frequency n1, Δn ≤ n1, then L ≥ n1−1 = v⋅f1−1. According to the constraint of sampling interval Δl, Δl can be selected as 0.015m−1. The effective spatial frequency interval (n1, n2) of road roughness power spectral density is divided into k = 59 small areas in turn. The center frequency of each space cell is n mid−j = 0.015⋅j + 0.0075 for j = (1,2,3,…59). Then the interval length of time frequency is Δfj = 0.25, which leads to f mid−j = 0.25⋅j + 0.125 for j = (1,2,…59).
In view of the constraint conditions of the time-delayed feedback control parameters shown in equation (9), the equivalent harmonic excitation method is used to construct the PSO algorithm with J(g
b
,τ
b
) as the fitness function of the vehicle semi-active suspension system performance evaluation index shown in equation (8). That is to say, a series of discrete frequency points are selected at equal intervals in the effective frequency band (f1, f2) and divided into multiple cells. Taking the harmonic excitation at the center frequency f
mid−j
= 0.25⋅j + 0.125 for j = (1,2,…59) of each cell as the equivalent harmonic excitation of the whole cell, the PSO algorithm with the vertical acceleration of the vehicle body as the optimization objective function is constructed to obtain the optimal value of the time-delayed feedback control parameters in the effective frequency band. In view of the characteristics that the vibration reduction effect of vehicle semi-active suspension system based on time-delayed feedback control under road random excitation is usually not as significant as that under road harmonic excitation, here, according to the frequency-domain analytical expression of the vertical acceleration as shown in equation (11) Amplitude frequency characteristic curve of vehicle body vertical acceleration.
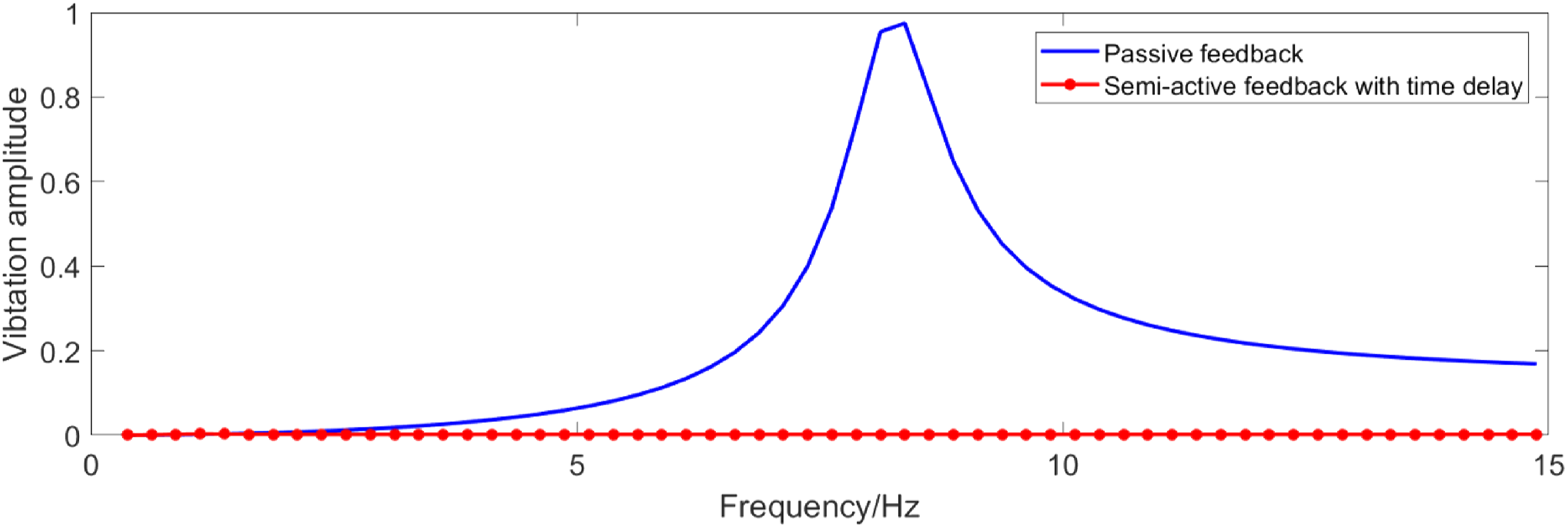
According to the frequency-domain simulation results of vehicle body vertical acceleration shown in Figure 2, it can be seen that compared with the vertical acceleration amplitude of the passive control suspension system, under the optimal time-delayed feedback control, the corresponding amplitude of the suspension system based on the time-delayed feedback control is reduced from 0.9746 in the passive control to 0.0018 in the time-delayed feedback control at the frequency f = 8.3750 Hz; at frequency f = 1.1250 Hz, the corresponding amplitude increases from 0.0018 in passive control to 0.0030 in time-delayed feedback control. 0.9746 and 0.0030 are the peak values of passive suspension system and time-delayed feedback control suspension system in the whole frequency band, respectively. Therefore, the amplitude frequency characteristics of the vertical acceleration of the vehicle body are significantly improved under the optimal time-delayed feedback control.
Stability analysis of vehicle suspension system with time-delayed feedback control
In view of the fact that the time-delayed feedback gain and feedback delay will affect the stability of the system after the introduction of time-delayed feedback control, in order to ensure that the vehicle semi-active suspension system with time-delayed feedback control can work in a stable state, the frequency domain scanning method
26
is applied to analyze the stability of the vehicle semi-active suspension system based on the time-delayed feedback control of body acceleration. The corresponding virtual roots and delay values are obtained, and the complete stability interval of the system can be obtained. The analysis process is as follows: 1. From equation (5), the characteristic equation of vehicle semi-active suspension system based on time-delayed feedback control with vertical acceleration of body acceleration is obtained

The time-delayed feedback control parameter gbop = −8356.7 N/m obtained from the optimization solution is substituted into the characteristic equation (12). According to the Routh–Hurwitz criterion, the sufficient and necessary condition for system stability is that all eigenvalues of equation (12) have negative real parts. The critical condition of system instability is that the characteristic root of equation (12) is only the pure imaginary root s = iω. Therefore, the real part and imaginary part of the characteristic equation can be separated by substituting s = iω in equation (12) and can be obtained as 2. For a given P(s) and Q(s), there is a polynomial L(s) = P(s)/Q(s). Therefore


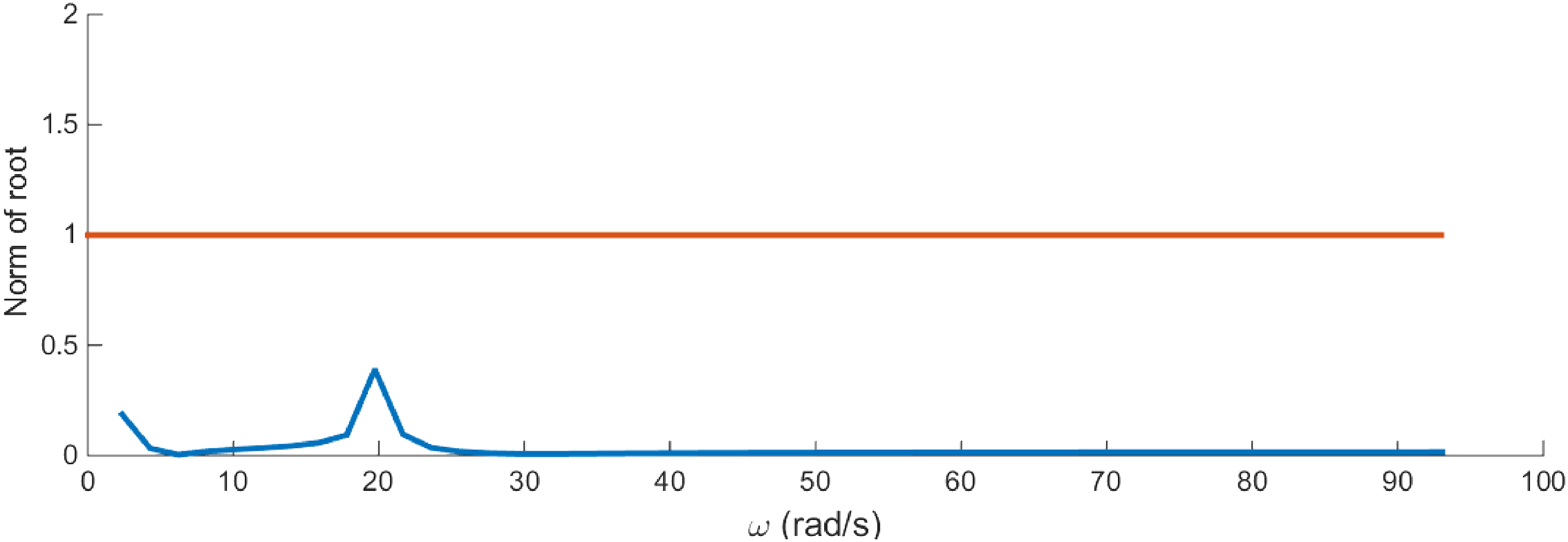
According to equation (15), we can get the diagram of the relationship between the mode |z| = 1 of the complex root of the characteristic equation and the cross frequency ω (rad/s) as shown in Figure 3. 3. The crossover frequency and the corresponding feedback delay are calculated. It can be seen from the diagram of |z| and ω (Figure 3) that the system has no cross frequency. Therefore, the vehicle semi-active suspension system based on the time-delayed feedback control of body vertical acceleration is stable in the effective frequency band. The modules of
Time-domain response simulation analysis of vehicle semi-active suspension system
In order to verify the correctness of the optimization results of the time-delayed feedback control parameters in the effective frequency band, it is necessary to conduct numerical simulation analysis and verification of the time-domain response of the performance evaluation index of the vehicle semi-active suspension system under road excitation according to the optimal value of the time-delayed feedback control parameters.
Time-domain simulation analysis under harmonic road excitation
Based on the center frequency of each interval in the effective frequency band, f
mid−1
=0.375 Hz is selected, then xq(t) = 0.0123 sin (2πf
mid−1
t+θ
−1
). According to the optimal value (gbop,τbop) of time-delayed feedback control parameters, the time-domain response characteristic curve of vehicle body vertical acceleration of passive and semi-active suspension system as shown in Figure 4(a) and (b) can be obtained through numerical simulation. The time-domain response characteristic curve of vehicle body vertical acceleration (t = 4 s and t = 5 s).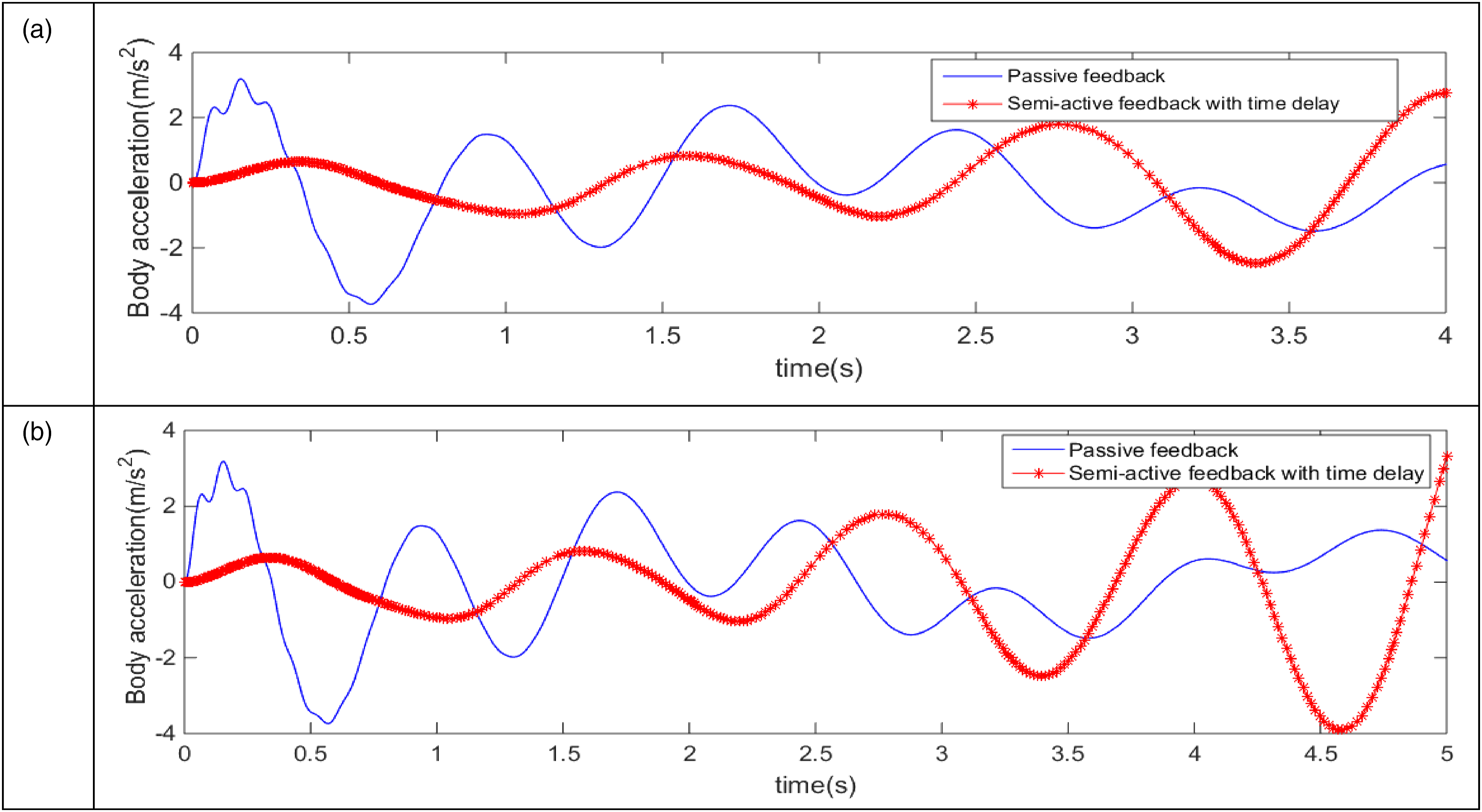
The time-domain simulation results show that compared with the passive control, under the optimal time-delayed feedback control, when t = 4 s, the root mean square value of the vertical acceleration of the suspension system based on the time-delayed feedback control with vertical acceleration of the vehicle body is reduced from 1.5730 m•s−2 in the passive control to 0.9694 m•s−2 in the time-delayed feedback control at the frequency f mid−1 = 0.375 Hz, so the optimization efficiency is 38.3737%. However, when t = 5 s, the root mean square value of the vertical acceleration of the suspension system based on the time-delayed feedback control with vertical acceleration of the vehicle body is reduced from 1.4769 m•s−2 in the passive control to 1.3106 m•s −2 in the time-delayed feedback control at the frequency f mid−1 = 0.375 Hz, so the optimization efficiency is 11.8723%. Therefore, according to the above time-domain simulation results, which can be concluded that under the condition of harmonic excitation, the response of the system diverge with time.
The key to the above-mentioned problem is that this paper adopts the control strategy of time-delayed feedback based on the vertical acceleration of the vehicle body, that is to say, the reason for this appearance is mainly caused by the selected time-delay feedback control strategy. However, in the follow-up research on the vibration reduction of vehicle semi-active suspension system based on time-delayed control, we have effectively solved this problem by using the time-delayed feedback control strategy based on the wheel displacement. Considering these complexities, and in order not to distract the reader from the main theme of this text, these topics are left for another publication.
Time-domain simulation analysis under random road excitation
With the C-level road roughness as the excitation and the help of MATLAB platform, the time-domain response characteristics of vehicle semi-active suspension system and vehicle passive suspension system are compared and analyzed. The simulation results of vehicle vertical acceleration, suspension dynamic travel, tire dynamic displacement, and vertical displacement of vehicle body are shown in Figures 5 (a)–(d). Time-domain simulation results of various performance evaluation indexes of vehicle suspension system. (a) Body vertical acceleration, (b) suspension dynamic stroke, (c) tire dynamic displacement, (d) vertical displacement of vehicle body.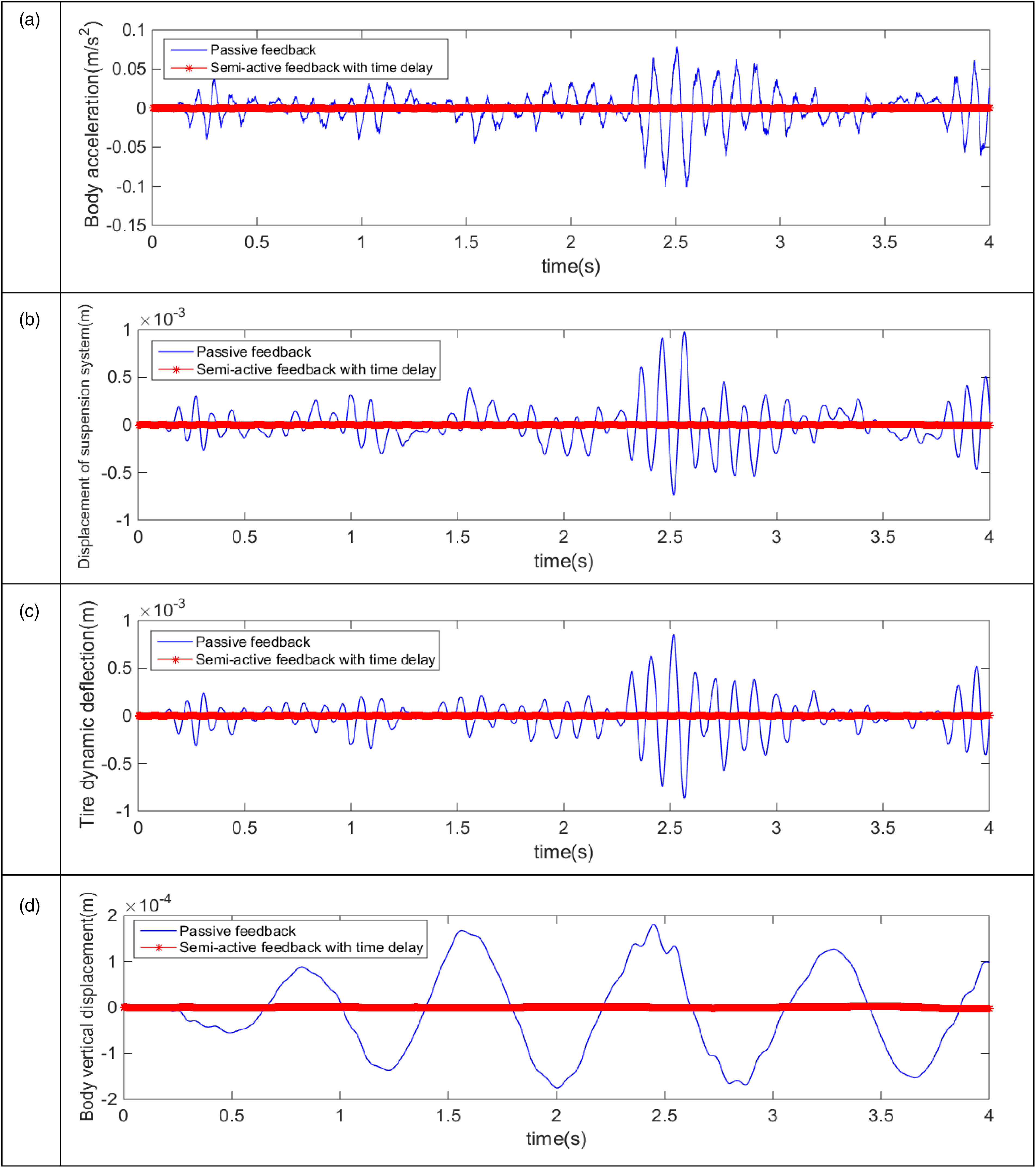
Results and discussion under random road excitation
According to the comparison of the root mean square values of various performance evaluation indexes of vehicle suspension system under random road excitation shown in Table 2, the following results can be drawn: 1. Compared with the passive control, the time-delayed feedback control significantly reduces the vertical acceleration amplitude of the body mass center. The corresponding root mean square value decreases from 14.20 mm/s2 in passive control to 0.0085 mm/s2 in time-delayed feedback control. Therefore, the optimization efficiency is 99.9397%. 2. Compared with the passive control, the time-delayed feedback control reduces the amplitude of suspension dynamic travel significantly. The corresponding root mean square value decreases from 173.46 μm in passive control to 2.5386 μm in time-delayed feedback control. Therefore, the optimization efficiency is 98.5365%. 3. Compared with the passive control, the time-delayed feedback control significantly reduces the amplitude of tire dynamic displacement. The corresponding root mean square value decreases from 154.34 μm in passive control to 2.1777 μm in time-delayed feedback control. Therefore, the optimization efficiency is 98.5891%. 4. Compared with the passive control, the time-delayed feedback control reduces the amplitude of the vertical displacement significantly. The corresponding root mean square value decreases from 87.57 μm in passive control to 1.2696 μm in time-delayed feedback control. Therefore, the optimization efficiency is 98.5503%. Comparison of RMS of various performance evaluation indexes of passive suspension and time-delayed feedback control suspension system.

Conclusions
In this paper, the mechanical model of vehicle semi-active suspension system based on time-delayed feedback control with vertical acceleration of the vehicle body is studied. Based on C-class road surface, the following conclusions are drawn through time-delayed stability analysis and time-delayed feedback control parameters numerical simulation analysis of suspension system: 1. Compared with the passive suspension system, the vehicle semi-active suspension system based on the time-delayed feedback control with the vertical acceleration of the vehicle body under the optimal time-delayed feedback control can effectively broaden the vibration absorption bandwidth of the vehicle suspension system. 2. Compared with the passive suspension system, the vehicle semi-active suspension system based on the time-delayed feedback control with the vertical acceleration of the vehicle body significantly improves the riding comfort and the stability of the vehicle under the disturbance of road random excitation. Thus, the comprehensive performance of the suspension is improved. 3. The effectiveness and feasibility of the parameter optimization strategy based on equivalent harmonic excitation are verified, which provides a theoretical reference for the optimal design of time-delayed feedback control parameters of vehicle suspension system.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study was supported by National Natural Science Foundation of China (Grant No. 51275280).