
Abstract
At present, rice potted seedling transplanting machine is mostly suitable for high-speed, large seedlings and large plant distance rice transplanting. In order to adapt to the transplanting of different types of rice potted seedlings, this study carried out theoretical research and institutional design for transplanting rice potted seedlings suitable for small seedlings and small plant spacing. A 2R open-chain rice potted seedling transplanting mechanism with two non-circular gears meshing to achieve the ideal transplanting posture was developed, and an optimization software for potted seedling transplanting was developed by establishing the kinematic model of the transplanting mechanism, which simulated the motion trajectory and attitude of the transplanting arm during the transplanting process. Through the optimization of the optimization design software parameters, a set of parameters that meet the requirements of transplanting rice potted seedlings in the rear insert rice potted are obtained, a transplanting mechanism suitable for walking rice potted seedling transplanting machine is designed and developed, and the experiments of rice potted seedling picking, conveying and planting are completed. The success rate of the designed walk-type rice potted seedling transplanting mechanism on the bench was 96.7%, and the qualification rate of the whole machine transplanting test was 89.1%.
Introduction
There are two main ways of mechanized rice planting, which are direct seeding and transplanting. 1 Mechanized direct seeding of rice can significantly improve agricultural labor productivity, resource utilization and land yield, shorten the fertility period to enhance the timeliness of rice planting, but also enhance the economic benefits of the grower and so on. 2 However, there are also many problems with direct seeding that have not been solved, such as poor uniformity of rice growth, not conducive to late management, serious grass damage in the field and high rate of collapse.3–5 Mechanized rice transplanting can be divided into rice throwing, blanket seedling transplanting, and potted seedling transplanting. Seedling throwed has the advantages of fast transplantation speed and no damage to the root, but it is also prone to problems such as uneven growth, shallow rooting and easy lodging 6 ; Blanket seedlings will have root injuries during machine cutting, and it takes a period of slow seedling after transplanting to the field. Compared with blanket seedling transplanting, rice potted seedling transplanting is conducive to cultivating strong seedlings, without damaging the roots, early tillering, effective tillering at low nodes increased by 20%, and the average yield increased by more than 10%. 7
The rice potted seedling transplanting mechanism mainly has push-out transplanting mechanism, gear linkage transplanting mechanism, linkage transplanting mechanism and non-circular gear train transplanting mechanism. Japan’s well off the production of PZP-80 type fully automatic rice potted seedling transplanting machine, which adopts the “push-out” transplanting method, relying on four sets of devices were completed to picking, turning, conveying and planting four actions. 8 Northeast Agricultural University and Xin Huayu Agricultural Machinery Equipment Co., Ltd. jointly developed a double crank 5 bar transplanting mechanism, is the only international light simplified machine into the market. 9 Yu Gaohong et al. proposed a picking potted type rice potted seedling transplanting mechanism, which uses non-circular incomplete gears to realize the rice potted seedling transplanting required unequal transmission ratios, the average success rate of picking seedling up to 93.06%. 10 Ye Bingliang et al. proposed a non-circular gear planetary gear system rice potted seedling transplanting mechanism consisting of one incomplete non-circular gear, six non-circular gears and two planting arms, and carried out a kinetic study. 11 Zuo Yanjun et al. designed a non-circular gear planetary gear system rice potted seedling transplanting mechanism, considering the agronomy of rice potted seedling transplanting to determine the 12 optimization objectives, and based on the human-computer interaction optimization method to obtain a set of structural parameters to meet the requirements of rice potted seedling transplanting. 12 Wu Guohuan et al. proposed a design method combining the forward design of a planetary gear system with the inverse design of local trajectory fine-tuning, which can obtain a better working trajectory and attitude. 13 Cai Jinping et al. designed a rice potted seedling transplanting device with variable row spacing and completed kinematic analysis and parameter optimization of the seedling picking linkage mechanism, with an average seedling picking success rate of 89.96% and an average seedling reversal rate of 3.45%. 14 Zhou et al. Maile proposed the design method of Bezier gears by fitting Bezier curves, and designed a rice potted seedling double-arm transplanting mechanism based on Bezier gears. 15 The mechanism can complete two transplanting actions by rotating 1 week, and the operating efficiency can reach 300 times per minute per row. On the whole, Japan has been conducting research on potted rice seedling transplanting started early, advanced technology. China’s corresponding field is also getting more and more attention. In the rice potted seedling transplanting mechanism, compared with the rod mechanism, non-circular gear transplanting mechanism has the advantages of high stability, high efficiency, etc., but for the realization of small seedlings, small spacing of rice transplanting mechanism there is still much room for progress.
Design and analysis of rice potted seedling transplanting mechanism
There are many transplanting mechanisms, and the drive system and planting arm of different transplanting mechanisms are not the same form and structure, but they can be summarized as 2R open-chain mechanisms. In the 2R open-chain mechanism, the drive system is converted into a crank, and the planting arm is converted into a rocker, and the motion law of the rocker relative to the crank is constrained by the gear train, rod mechanism, slide mechanism or its combination mechanism, so that the rocker realizes the seedling trajectory and attitude. For the selection of transplanting attitude and trajectory, this study determined the maximum allowable deviation of the pull-type transplanting trajectory and attitude by extracting the position and pose information of the transplanting process of anthropomorphic rice potted seedlings, and planned the trajectory and attitude of mechanized transplanting of rice potted seedlings, as shown in Figure 1. In order to realize the shown transplanting trajectory and attitude, and match the transplanting characteristics and applicable scenarios of the walking-type rice potted transplanter, a 2R open-chain mechanism design method with differential non-circular gear train constraint is proposed to carry out the research and scale design of the rice potted seedling extraction trajectory generation mechanism.

Posture of anthropomorphic rice potted seedling transplanting process: (a) pick the seedling position, (b) seedling pulling stage, (c) conveying stage,(d) planting position, and (e) backhaul phase.
In the existing non-circular gear train rice potted seedling transplanting mechanism, two-stage non-circular gear train is mostly used to constrain the law of motion of the mechanism, and the degree of freedom of the mechanism is 1, which leads to the mutual constraints of the two-stage unequal-speed transmission ratios, and problems such as the accumulation of the side backlash, and the feasible solution domain of the transplanting mechanism is restricted with low design flexibility and poor accuracy. In order to avoid these problems and better complete the transplanting operation, the 2R open chain mechanism constrained by differential non-circular gear train proposed in this study is a single-stage unequal-speed transmission with the degree of freedom of the mechanism being 2, which has a large feasible solution domain and no side backlash accumulation and other problems.
When designing the transplanting mechanism, according to the given trajectory and attitude constraints, the differential 2R open-chain non-circular gear train mechanism that satisfies the attitude constraints can be obtained by constructing the rod motion law of the 2R open-chain mechanism based on the given attitude and the correspondence between the position and the attitude with the given trajectory and attitude constraints, taking the angle of the two prime movers of the differential non-circular gear train mechanism constrained by the differential non-circular gear train mechanism as the known variables. The constructed model of the differential 2R open-chain mechanism is shown in Figure 2. The planetary carrier is transformed into a crank as shown in Figure 3, and the actuating member is transformed into a rocker, which transforms the problem of studying the matching relationship between the angular velocity ω1 of the planetary carrier and the angular velocity ω2 of the sun gear as well as the unequal gear ratio i of the non-circular gears into the problem of solving the crank angle θ1, the rocker angle θ2, and the functional relationship between the two.
Differential non-circular gear train.

Analysis model of 2R open-chain.
First, to solve the crank (planetary carrier) angle θ1 and the rocker (actuating member) angle θ2 function θ2 = f(θ1), the establishment of the crank (planetary carrier) center of rotation as the origin of the coordinate system, the crank (planetary carrier) for the whole week of the circumferential rotation as the constraints, based on the farthest and nearest points of the predetermined trajectory, to determine the length of the crank (planetary carrier) L1 and the length of the rocker (actuating member) L2, can be determined to determine the length ratio of the rod is shown in Figure 4.

Calculation model of 2R open-chain mechanism.
Then, taking a series of point sets on the trajectory as known conditions, based on the crank length L1 and rocker length L2, solve the crank angle θ1 and rocker angle θ2 corresponding to a series of discrete points on the trajectory, and then establish the numerical functional relationship between the crank angle and the rocker angle θ2 = f(θ1), that is, the revolute pair rotation law.
Finally, the functional relationship between the rocker angle θ2 and the crank angle θ1 reflects the angular relationship between the actuating member and the planetary carrier, and the rotation law of the planetary carrier is known (the planetary carrier is the driving part), so that the rocker (actuating member) can be determined to be the angle θ2. After determining the angle θ2 of the rocker (actuating member), the differential non-circular gear system is applied to constrain the degree of freedom of the 2R open-chain mechanism to make the mechanism’s degree of freedom is 2, and at the same time, satisfy revolute pair rotation law. The trajectory constrains the unequal speed rotation law of the rocker (actuating member) relative to the crank (planetary carrier), that is, in one working cycle (the planetary carrier turns 2π), the rocker (actuating member) turns 2π relative to the planetary carrier. the angle of turn θ2 of the rocker (actuating member) is determined by the rotation law of the sun gear and unequal speed ratio of the non-circular gears together, and with the rotation law of the sun gear known (the sun gear is the prime mover), the differential speed can be determined. The unequal speed ratio law of the non-circular gear system can be determined by knowing the rotation law of the sun gear.
After the above theoretical analysis, it can be seen that based on the kinematic mapping theory, a numerical calculation model of revolute pair angle and rod length size is established, and the differential ratio and unequal speed transmission law are solved according to the given crank (planetary carrier) angular velocity ω1, sun gear angular velocity ω2 and trajectory and attitude, and the mapping relationship between trajectory and attitude and component motion is established, that is, the transplanting curve similar to the anthropomorphic trajectory can be obtained, and the corresponding non-circular gear train meshing model can be obtained, which has a simple structure, high transmission efficiency and no backlash accumulation. It can be well used as the design basis and method of rice potted seedling transplanting mechanism.
Transplanting mechanism transmission design
The designed non-circular gear system rice potted seedling transplanting mechanism was mainly composed of a drive system and two differential non-circular gear trains as shown in Figure 5 and the drive system II includes an active shaft, a driven shaft, three active sprockets, three transmission chains, and three driven sprockets; Differential non-circular gear trains I and III are the same composition, containing a pair of non-circular gears meshing with each other, planetary carrier and planetary shaft, and planting arm.

Transplant mechanism: (a) three-dimensional structure diagram of transplanting mechanism, (b) schematic diagram of the transplanting mechanism, and (c) gearbox.
In the drive system, the active sprocket is fixed on the active shaft, the active sprocket is connected to the driven sprocket through the transmission chain, and the driven sprocket in the middle is fixed with the driven shaft, and the transmission ratio is 1:1. The active gears on both sides are connected with the driven gears on both sides by chains, the transmission ratio is 2:1, and the driven sprockets on both sides are empty on the driven shaft, and they are meshed with the sun gear in the transplanting mechanism through dental inserts to drive the rotation of the sun gear.
In differential non-circular gear trains I and III., the sun gear is fixed with the driven sprocket through the pin, and the planetary carrier is fixed with the driven shaft; The planetary shaft is hinged on the planetary carrier, with the planetary gear and the planting arm at each end. The sun gear meshes with the planetary gear structure, and its average rotation ratio is 1:1.
Kinematic analysis
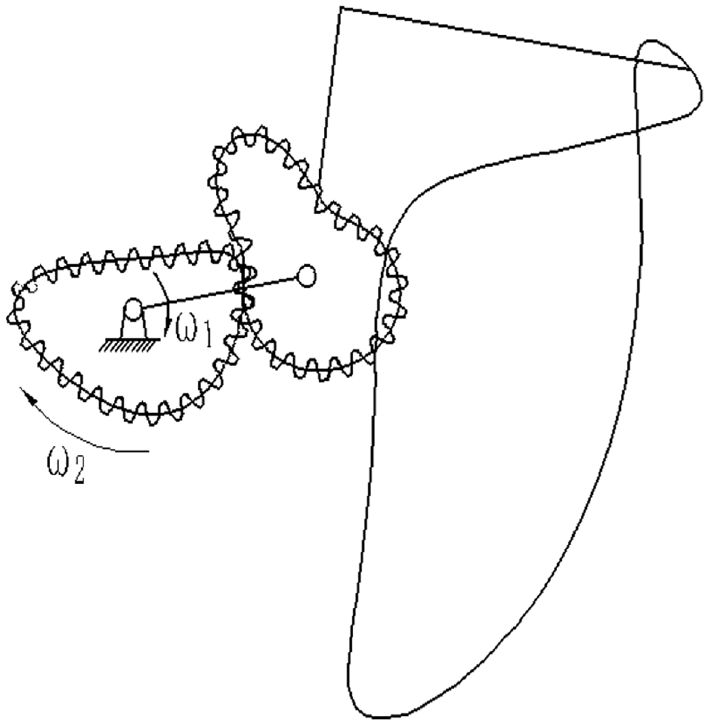
The walking-type rice potted seedling transplanting mechanism is a planetary gear train mechanism composed of two non-circular gears, gear 1 is a sun gear, and gear 2 is a planetary gear. As a conjugate gear of gear 1, gear 2 rotates around gear 1 at the same time. The schematic diagram of the transplanting mechanism of non-circular gear planetary gear series rice potted seedlings is shown in Figure 6.

Schematic diagram of differential non circular planetary gear train mechanism.
During the working process of the walking-type rice potted seedling transplanting mechanism, the angle of the planetary carrier from the initial position is φ. The initial mounting angle of the transplanting arm assembly is δ0; The absolute rotation angle of the planetary shelf is φH(φ); The rotation angle of the sun gear and the planetary gear relative to the planetary carrier are expressed as β1(φ) and β2(φ), respectively; The absolute rotation angles of the sun and planetary gear are expressed as φ1(φ), φ2(φ); It is specified that counterclockwise rotation is positive and clockwise rotation is negative.

The sun gear rotates counterclockwise relative to the planetary carrier, and the angle of rotation formula is expressed as

The planetary gear rotates clockwise relative to the planetary carrier, and the angle of rotation formula is expressed as

The absolute angle formula for the sun gear is expressed as

The absolute angle formula for the planetary gear is expressed as

The center of rotation of the sun gear is expressed as

The center of rotation of the planetary gear is expressed as

The tip point D of the planting arm can be represented at the coordinate system coordinate position

During the working process of the walking-type rice potted seedling transplanting mechanism, the planetary carrier kept rotating clockwise and at a uniform speed, and the angular velocity was ω; ω1, ω2 represent the angular velocity of the sun gear and the planetary gear respectively, the angular velocity of the ω1 sun gear is a known quantity, and the angular velocity formula of the ω2 planetary gear is expressed as

The tip point D of planting arm in the X, Y direction velocity formula is expressed as

α1, α2 represent the angular acceleration of the sun gear and the planetary gear respectively, where α1 is the known quantity, and the angular acceleration α2 of the planetary gear is expressed by the formula

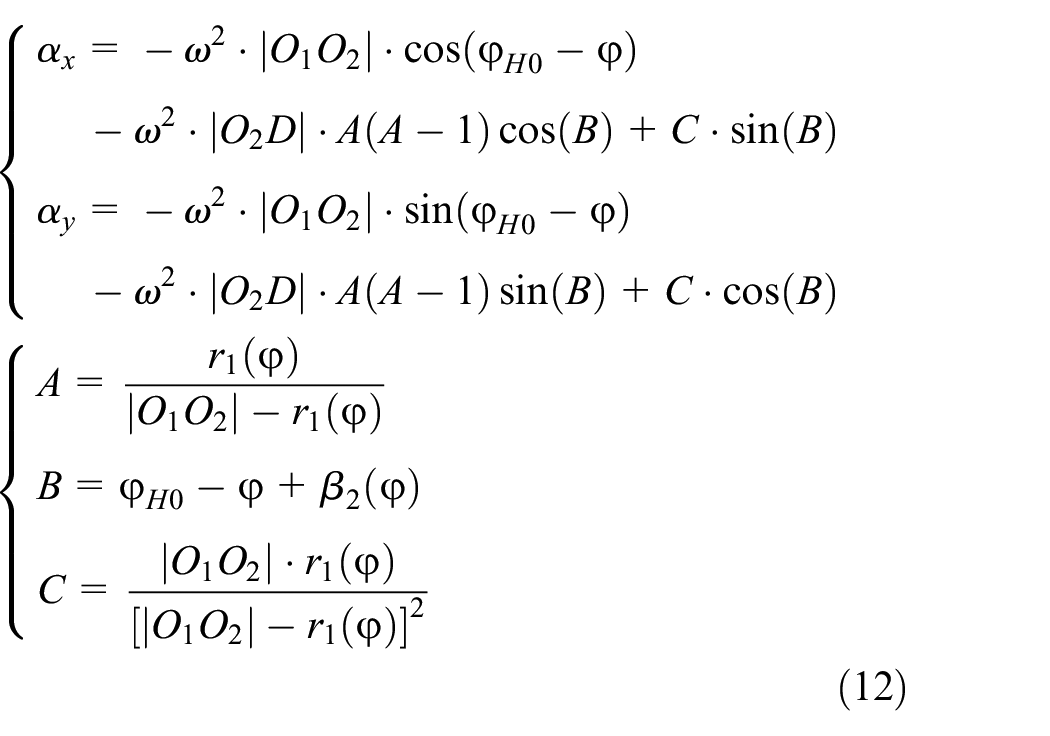
αx, αy represents the acceleration of the planting arm tip point D in the X, Y direction, and the formula is expressed as
Parameter optimization
In this study, the mathematical model of the whole and its components of the walking-type rice potted transplanting machine was established, and the relevant parameters were obtained. The non-circular gear designed based on the Bezier section curve has the characteristics of multiple parameters, multiple targets and nonlinearity, and the optimization target was developed according to the agronomic requirements of transplanting small seedlings and small plant distance rice potted seedlings, and an optimization design software for rice potted seedlings transplanting based on visualization platform was developed. 16 By optimizing and adjusting the parameters of the rice potted seedling transplanting mechanism, a set of ideal optimization parameters and corresponding transplanting trajectories are obtained:

where r is the polar diameter of the type-value point and θ is the polar angle of the type-value point; It is the initial mounting angle of the planting arm; Yx, Yy is the horizontal and vertical coordinates of the strawbox coordinate system; S is the length from the center of the planetary gear to the tip of the planting arm; H is the distance from the center of rotation of the planetary gear to the axis of the pusher. Under this set of parameters, the transplanting mechanism of the walking rice potted seedling transplanting machine can meet the optimization goal and ideal transplanting trajectory, and the optimized relative and absolute motion transplanting trajectories are shown in Figures 7 and 8.

Relative motion optimization trajectory.

Absolute motion optimization trajectory.
Simulation
In this study, ADAMS software was mainly used to complete the kinematic analysis of the transplanting mechanism. For the motion simulation of the transplanting mechanism, it is mainly divided into relative motion and absolute motion simulation analysis, through the simulation analysis, understand the meshing of the designed non-circular gear and the rationality of the design of each stage of the cam, and analyze the movement trajectory of the planting arm tip and the ideal trajectory consistency of the software. Import the 3D model of the transplanting mechanism established in advance into ADAMS and add the corresponding constraints, as shown in Figure 9. By comparing the simulation results of the transplanting mechanism with the relative motion transplanting trajectory of the optimization software, the correctness of the theoretical analysis, software optimization and motion simulation can be verified by each other.

ADAMS simulation model.
Through the comparison of optimization software and simulation motion, it can be found that the trajectory of optimization software and simulation analysis is basically the same, as shown in Figures 10 and 11, the trajectory is continuous as a whole, and there is no large vibration phenomenon, the transplanting mechanism rotates for a week to complete the transplanting of rice potted seedlings, and according to the transplanting trajectory, the design verification of each stage of the cam is completed, and it can also be found that the picking, conveying and planting stages can also meet the transplanting requirements through observation.

Comparison of relative motion trajectories: (a) optimize the relative motion trajectory of the software and (b) simulate relative motion trajectory.

Absolute motion trajectory comparison: (a) optimize the absolute motion trajectory of the software and (b) simulate absolute motion trajectory.
Experimental study
In order to verify the transplanting performance of the designed transplanting mechanism, combined with high-speed camera technology, the relative motion operation test of the transplanting mechanism was completed on the test bench, and the motion trajectory of the transplanting mechanism on the test bench was drawn, and the optimization software and simulation results were compared and analyzed. Finally, the seedling retrieval test and transplanting test of the institution are carried out.
Trajectory analysis test
The high-speed camera technology is used to shoot the test bench experiment video, in which the shooting rate of the high-speed camera is 60 f/s, and the rotation rate of the transplanting mechanism is set to 100 r/min. Combined with high-speed video, the movement trajectory of the tip of the planting arm is drawn. The relative motion trajectory analyzed by the software, the relative motion trajectory of ADAMS simulation and the relative motion trajectory of high-speed camera are compared and analyzed, as shown in Figure 12, and the relative motion trajectories of the three are basically the same, which verifies the correctness of theoretical analysis, optimization design software writing, mechanism simulation analysis and processing and assembly.
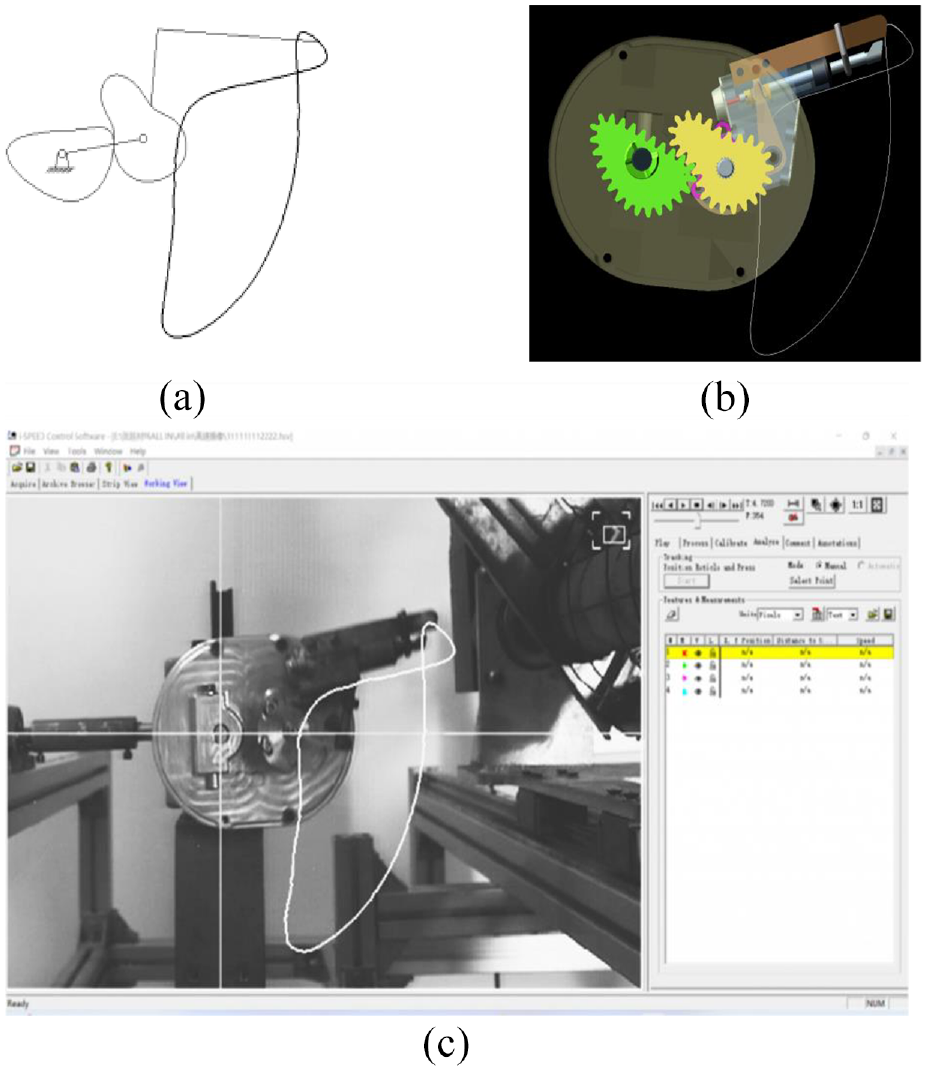
Relative motion trajectories of transplanting mechanism comparison: (a) the software analyzes relative motion trajectory, (b) ADAMS simulates relative motion trajectory, and (c) high-speed camera relative motion trajectory.
Taking the rotation center of the test bench as the coordinate origin, the angle between the planetary carrier and the horizontal direction, the tip point of the planting arm and the angle between the rotation center and the horizontal direction were selected, and the corresponding angles of the key stages such as starting to pick, completing the picking, starting to push, completing the pushing, starting to reset and completing the reset were compared and analyzed to optimize the design software and high-speed camera. The angle data shown in Table 1 is obtained.
Comparison of key angles between optimized software and high-speed camera.

Through comparative analysis, the angles of each stage of high-speed camera are basically the same as those of the optimization design software, and the existing errors are within the range that does not affect the transplanting effect. The main reason for the error is that there is an error in the processing of the mechanical parts, and the initial phase angle of the transplanting mechanism cannot be accurately guaranteed during the assembly process. In the stages of starting the picking, completing the picking, starting the pushing, completing the pushing, starting the reset and completing the reset, the completion of the reset error is large, mainly because the position of each transplanted part that has completed the reset cannot be accurately determined in the optimization software, and there is a possibility of inaccurate measurement.
Bench seedling picking test
After the completion of the high-speed camera analysis test, the rationality of the designed transplanting mechanism was verified, and in order to further demonstrate the feasibility of transplanting mechanism to take seedlings, the transplanting mechanism continued to carry out the potted seedling picking test on the test bench. In the experiment, the traditional potted-growing plastic rice tray was selected, which was consistent with the size of the rice tray used in the design of the transplanting mechanism, with 14 holes per row, a total of 29 rows, and a total of 406 holes. The distance between each cave is 20 mm, the size of the top of hole is 17 mm × 17 mm, the size of the bottom of the hole is 11 mm × 11 mm, and the depth is 17 mm. According to the transplanting requirements of 2ZBM-430 walking-type rice potted seedling transplanting machine, the transplanting frequency is 100–120 times per minute, and the speed of the test bench can be set to 100 r/min through PLC, and the left and right moving speed of the rice box also changes, completely simulating the transplanting situation of the rice potted seedling transplanter. As shown in Figure 13, the transplanting mechanism is moved at various stages.
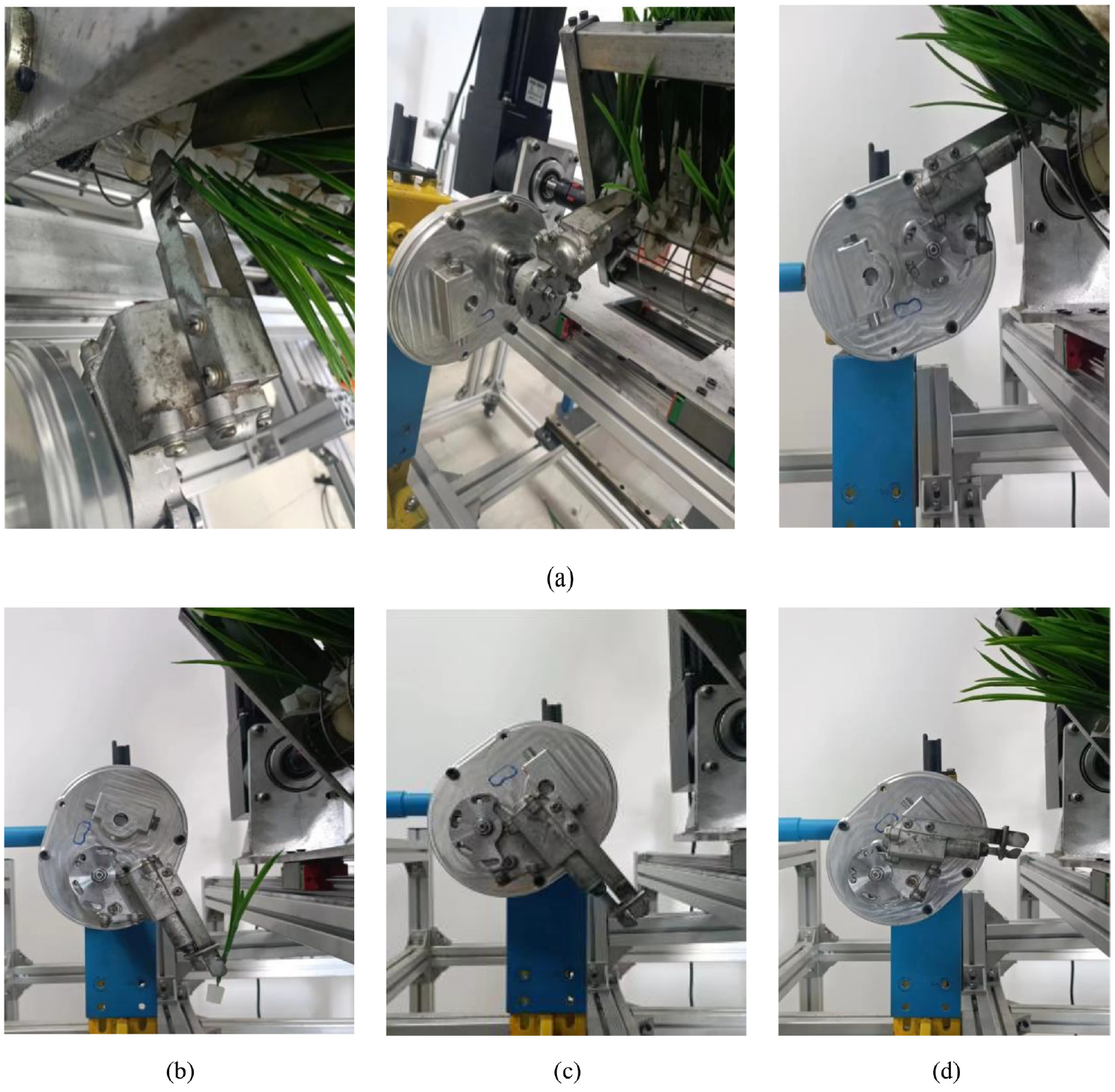
Different stages of transplanting mechanism seedling harvesting experiment: (a) the transplanting mechanism picks the seedlings, (b) the transplanting mechanism conveys the seedlings, (c) the transplanting agency pushes the seedlings, and (d) transplanting mechanism return stage.
After debugging the transplanting mechanism and the test bench as a whole, the transplanting mechanism can better complete the process of picking seedlings, conveying seedlings and pushing seedlings, the success rate of transplanting was about 96.7%, the seedlings that failed transplanting are mainly due to the position of seedlings in the cave tray is skewed, the initial upright degree of seedlings is not enough, the planting arm picks the seedlings when picking the seedlings, there is a situation of picking the seedling leaves, and does not push to the root of the seedlings when pushing the seedlings, or directly picking the roots of the seedlings, resulting in the failure of transplanting.
Transplanting mechanism installation planting test
In order to further demonstrate the feasibility of the transplanting mechanism, the transplanting mechanism was installed on the walking-type rice potted seedling transplanting machine, as shown in the Figure 14, and the field transplanting test was completely simulated.

Walking-type rice potted seedling transplanting machine.
For the soil trough with a width of 1.5 m and a length of 2 m as shown in Figure 15, the soil is soaked and precipitated for about half an hour after rotary tillage, so that the soil becomes soft and the field conditions that simulate field rice transplanting were achieved. According to the transplanting requirements, the transplanting plant spacing is set to 120mm, the row spacing is 295 mm, a total of 4 rows, and the transplanting speed is set to 100 r/min.

Transplanting mechanism installation and planting test.
In the seedling retrieval test, the transplanting mechanism can realize the planting arm picking the seedling stem during the operation process, and the rice seedlings are picked out of the rice tray and the planting is regarded as successful transplanting, 17 a total of three groups of transplanted seedlings were carried out in this experiment, the success rate was 89.1%., the depth of planting was in the range of 6–9 mm. There are two main reasons for transplanting failure, one is that the seedlings are not picked and the seedlings fall during the picking process of the potted transplanting mechanism, and the other is that the seedlings are dumped or tilted too much after planting.
Conclusion
(1) Developed a 2R open-chain mechanism for rice potted seedling transplanting with two non-circular gear meshing to drive the transplanting mechanism to work and achieve the ideal transplanting trajectory, and applied this mechanism to the walking-type rice potted seedling transplanting machine, in order to realize the rice potted seedling transplanting of small seedlings, small plant spacing and small fields, it has important theoretical significance and application value for improving the reliability of rice potted seedling transplanting mechanism and promoting the development of rice transplanting.
(2) According to the agronomic requirements of small seedlings and small plants to distance rice potted seedlings, the optimization goal was proposed, and the optimization design software of rice potted seedling transplanting based on the visualization platform was developed. By optimizing and adjusting the parameters of the rice potted seedling transplanting mechanism, a set of ideal optimization parameters and corresponding transplanting trajectories were obtained.
(3) Processing and assembling the transplanting mechanism, the success rate of seedling retrieval of the transplanting mechanism was 96.7%, and the transplanting success rate was 89.1% when the transplanting mechanism was applied to the modified walking-type rice potted seedling transplanting machine.
Footnotes
Handling Editor: Chenhui Liang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study was financially supported by the National Natural Science Foundation of China (Grant No. 52005221), Jiangsu Agriculture Science and Technology Innovation Fund (Grant No. CX(22)3089), China Postdoctoral Science Foundation (Grant No. 2021M691315), Key R&D Plan of Zhenjiang City - Modern Agriculture (Grant No. NY2023003), Natural Science Foundation of Jiangsu Province (Grant No. BK20200897), Key Laboratory of Modern Agricultural Equipment and Technology (Jiangsu University), High-Tech Key Laboratory of Agricultural Equipment and Intelligence of Jiangsu Province, and Priority Academic Program Development of Jiangsu Higher Education Institutions (Grant No. PAPD-2018-87)