
Abstract
The dynamic model is very important for the design of a wall-climbing robot and the final realization of its motion performance. The general process of dynamic modeling and expression equations of dynamic models are given for the wheeled wall-climbing robot based on the modeling method of the Udwadia-Phohomsiri equation. Firstly, the dynamic model of an unconstrained four-wheeled wall-climbing robot is constructed. Then, a trajectory constraint is defined, the rationality of the dynamic model for the unconstrained wall-climbing robot is verified by numerical simulation. Again, constraint equations under the conditions of synchronous toothed belt structure, non-lateral motion and nonslip between the driving wheel and the wall surface are established. Finally, the dynamic model of the unconstrained wall-climbing robot is gradually combined with constraint equations, and numerical simulations are implemented. Numerical simulation results verify the correctness of the wall-climbing robot model and constraint models, as well as the effectiveness and advantages of the modeling method.
Keywords
Introduction
Wall-climbing robots could be widely used in wind power detection and repair, 1 aircraft skin detection, 2 building exterior wall cleaning detection,3,4 dam detection, 5 and other aerial work fields. They have great application potential in replacing human to complete aerial dangerous work. According to different working environment and structure requirements, there are a variety of adsorption and moving modes for currently developed climbing robots.6–12
The construction of dynamic models is an important step in the research and development of wall-climbing robots, because the dynamic models play important roles in the design of robot control algorithm to achieve motion performance. 13 In the literature reported of recent years, when designing wall-climbing robots with different structures and functions, the dynamic modeling methods of wall-climbing robots mainly includes vector mechanics method based on Newton Euler equation14–19 and analytical mechanics method based on Lagrange equation.20–22 Dynamic models established by Newton Euler method and by Lagrange method are equivalent. 23 The process of constructing the dynamic equations of wall-climbing robots by Newton Euler method is tedious and difficult to solve, and constraint forces are required to be known in the process of solving. To solve the dynamic models, which constructed by Lagrange multiplier method, the unique solution could be obtained only when the initial conditions satisfied the given conditions. The solution of Lagrange multiplier is also complex. The combination method of Lagrange equation and Newton Euler equation could avoid the calculation of Lagrange multiplier, that would inevitably fall into the analysis process of vector mechanics again. Kane’s equations and Gibbs-Appell formulation embed constraints into dynamic expressions, which could construct dynamic equations without introducing additional parameters such as the Lagrange multiplier. However, the modeling process introduces process parameters such as “partial velocities,” 24 “quasi-coordinates,” 25 and “quasi-accelerations,” 26 that do not have clear physical significance. Although the dynamic model of a wall-climbing robot could be constructed concisely by Udwadia-kalaba equation, 27 the constraint construction and the constraint treatment of the inherent structural and physical characteristics of the robot system are still important contents in the modeling process, and few scholars focus on these parts.
In this paper, the constraints which were generated by robot structure, working environment, and tasks are analyzed and modeled. The dynamic model and modeling process of a wall-climbing robot were studied and analyzed based on Udwadia-Phohomsiri equation. The dynamic model of unconstrained the wall-climbing robot, as well as models of structure constraint and environmental constraint of the robot such as synchronous toothed belt, non-lateral motion, and nonslip on wall were constructed. By combining with a trajectory tracking task, the correctness of various models was verified step by step. The process of constraint modeling for structures and working environments could be extended in the modeling of other wall-climbing robots or mobile robots with similar structures, so that dynamic equations of robots can be obtained by using analytical mechanics method without solving the auxiliary variables such as Lagrange multiplier. Through the numerical solution of the dynamic equation, the basis for the selection of robot driving motors of the robot could be obtained, which lays the foundation for the structure design and control algorithm design.
The main contributions of this paper are as follows. (1) A modular method for building the dynamic model of wall climbing robot is proposed based on the Udwadia-Phohomsiri equation. The method could construct the dynamic model of robot more flexibly and conveniently. (2) The proposed method could not only reintegrate the body structure of the wall climbing robot after modeling by modules, but also integrate the constraints between structures, or between structures and environments after modeling by modules, which is more convenient for the constraint analysis of the robot. (3) According to the requirements of dynamic analysis, the structure and environmental constraints of the wall climbing robot with the conditions of synchronous toothed belt structure, non-lateral motion and nonslip between the driving wheel and the wall surface are constructed. Combined with the trajectory tracking task, various constraints are applied step by step to the dynamic model of the wall climbing robot. The impacts of various structural constraints on the trajectory tracking task of the wall climbing robot are analyzed through numerical simulation.
The outline of the remaining of the paper is organized as follows. In Section “Theoretical basis,” the theoretical basis of the proposed dynamic modeling method for wall-climbing robot is provided. In Section “Dynamic modeling of the unconstrained wall-climbing robot,” the structure of a wheeled wall-climbing robot is described, and the dynamic model of the unconstrained wall-climbing robot is constructed without considering detailed structural characteristics and specific environmental conditions. In Section “Trajectory tracking of the four wheeled wall-climbing robot,” the dynamic equation of the wall-climbing robot is constructed by assigning a constraint of task trajectory, and the numerical simulation analysis is carried out. In Section “Trajectory tracking of the robot with constraints from synchronous toothed belts,” Section “Trajectory tracking of the robot with non-lateral motion constraint,” and Section “Trajectory tracking of the robot under the nonslip constraint between wheels and wall,” constraints of the wall-climbing robot are analyzed, and constraint equations of the synchronous toothed belt structure, the non-lateral motion structure, and the nonslip between driving wheel and wall surface are constructed. Simulations show influences of constraints on the trajectory tracking task of the wall-climbing robot, and verifies that constraint models are consistent with the actual situation. Finally, in Section “Conclusion,” concluding remarks are stated.
Theoretical basis
Udwadia and Kalaba 28 have proposed the basic framework of dynamics modeling for constrained mechanical systems through three steps. Firstly, the dynamic equation of unconstrained system is constructed. Secondly, the working environment and tasks are described as the form of constraint equations. Finally, the dynamic equation for constrained system is constructed by combining the dynamic equation of unconstrained system with constraint equations. Because the dynamic model of multibody system can be established relatively simply, the method has been studied in the aspects of dynamic modeling and control,29,30 and has been gradually popularized and applied in the field of robots.31,32 Aiming at the problem for the singularity of mass matrix in dynamics modeling of mechanical systems, Udwadia and Phohomsiri 33 have discussed and solved.
Unconstrained robot system
If each functional part of the robot system is regarded as a single rigid body, according to the Lagrange equation, at any time

where
If

where
If

If the i-th rigid body in a robot system is described by

The dynamic equations of the robot system under unconstrained conditions could be integrated as

In equation (5), the virtual displacements of the subsystems in the
Constraint models
In order to accomplish specific tasks, a robot system needs to be constrained in many specific forms. If the number of constraints imposed on the robot is


Equations (6) and (7), which describe constraints of the robot system, contain the number of equations is


If continuous constraint equations in equations (8) and (9) are smooth enough, the first and second derivatives of their relative time

where
Dynamic model of constrained robot
In order to complete given tasks of the robot system, constraints which represented by equation (10) are applied to the dynamic model of the unconstrained robot system represented by equation (5). When the k-dimensional generalized forces/torques vector

The coordinates in the generalized coordinate vector
According to Udwadia-Phohomsiri equation,
33
if constraint equations and the dynamic equation of the unconstrained robot are correctly described, then the matrix with the rank of

The explicit acceleration equation for the constrained robot can be expressed as

where

Thus, the explicit equation of the robot and the constraint equations of forces/torques all could be obtained. The dynamic model of the robot could be constructed.
Dynamic modeling of the unconstrained wall-climbing robot
Structure of the four wheeled wall-climbing robot
Consider an individual wall-climbing robot with general features, as shown in Figure 1. The robot is attached to the vertical wall, and two driving motors drive the wheels on the same side of the robot respectively through the synchronous toothed belt to form a four-wheel drive. The robot can go straight or turn by controlling the synchronous or differential rotation of the left and right driving wheels.

The four wheeled wall-climbing robot on the wall.
In Figure 1,
According to the general form of Lagrange dynamic equation, the dynamic model of the wall-climbing robot can be expressed as

where
Let


According to the Udwadia-Kalaba equation, the dynamic model of the wall-climbing robot could be expressed as

Analysis of adsorption force
The motion resistance of the robot on the wall is determined by the adsorption force. The larger the adsorption force is, the greater the stability and load capacity of the wall-climbing robot are, and the motion resistance on the wall increases correspondingly.
When the wall-climbing robot is stationary on the wall, it needs to meet

where

If the mass centers of the four wheels in the same plane with the mass center of the body structure, the distance between the center of mass and the wall is
where
From

The following inequality can be obtained as

Combined with the equation (6)

The minimum critical equivalent adsorption force, which acting on the wall-climbing robot can be obtained. According to the relationship between the wall friction resistance and the equivalent adsorption force, the friction resistance of the wall-climbing robot can be obtained as

Dynamic model of the unconstrained wall-climbing robot
The centroid position of the body structure for the wall-climbing robot in the XOY coordinate system can be expressed as

Axis position coordinates of the left two wheels and the right two wheels for the wall-climbing robot can be expressed as

and

According to the modeling idea of the Udwadia-Kalaba equation, the dynamic model of the wall-climbing robot without driving constraints can be obtained through the Lagrange equation



and


In equations (30) and (33)

in equations (30), (33), and (34),
The proposed dynamic model of the unconstrained wall-climbing robot neither include the external constraints imposed by the robot to perform the predetermined tasks, nor include the structural constraints of robot itself. The model is the wall-climbing robot structure with four omni-directional wheels, and each omni-directional wheel on each corresponding position of the body.
Trajectory tracking of the four wheeled wall-climbing robot
Trajectory constraints are common holonomic constraints in robot dynamics. It is a common task in application scenarios to make the wall-climbing robot move along a given trajectory.
Task trajectory constraints
According to the specific task, the wall-climbing robot needs to move on wall according to specified trajectories. One of trajectories is a circle and the equation is

The other trajectory is an 8-shaped, and the equation is

Differentiating equations (35) and (36) with respect to time t twice yields


According to the Udwadia-Phohomsiri modeling method, the constraint equation could be obtained as

Baumgarte stability correction for the trajectory constraint
The forward dynamic simulation of the robot needs to solve the dynamic equation of the wall-climbing robot with constraints. In this process, the initial conditions of the robot are required to meet the requirements of the constraint equation, which is difficult to realize in the practical application of the robot. The numerical solution of acceleration level equation inevitably produces the constraint violation errors. The control of constraint violation errors can be realized by the correction of acceleration, speed, or position level. 34 Baumgarte violation stability correction method 35 can eliminate the influence of numerical solution errors from the acceleration level without significantly increasing the amount of numerical simulation calculation, and make the robot that does not meet the initial conditions asymptotically stable to the constrained trajectory. Therefore, the Baumgarte violation stability correction method is selected in this paper to complete the numerical simulation of task trajectory constraint tracking.
According to equation (8), the trajectory constraint as a complete constraint equation could be denoted as

Combined with equation (39), the second derivative of equation (40) could be recorded as

The Baumgarte violation stability correction method treats the integrating process shown in Figure 2 as an open-loop control system. In this system, if there is any interference, neither
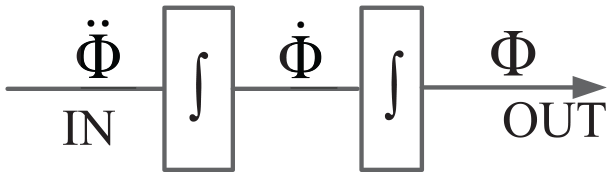
Integrating processes.
According to the Baumgarte constrained violated stabilization method, replace

If
The basic correction principle of this idea is that the numerical integration error is regarded as interference. The structure of the control system of closed loop can be considered as Figure 3. From the formula (42), it can be found that the fundamental principle of the correction equation is to correct the acceleration by the feedback of position and velocity. Equation (42) is the differential equation of the closed loop system of the constrained equation, and in which

The control system of the method for constrained stabilization.
Combined equation (41) and (42), the trajectory constraint equation which is treated by stability correction could be obtained as

in which

Dynamic model of the robot with trajectory constraint
According to the Udwadia-Phohomsiri equation, the explicit acceleration equation of the wall-climbing robot with the modified trajectory constraint can be obtained as

in which,

in equations (45) and (46),
The constraint force equation of the wall-climbing robot system with the given trajectory constraint is

Equation (45) represents the dynamic equation of the wall-climbing robot with four omni-directional wheels installed at each corresponding position of the robot body part under the given trajectory constraint. The numerical simulation of the forward dynamics for the wall-climbing robot can be carried out according to the equation. Equation (47) represents the equation of constraint forces along the wall coordinate directions when the robot moves along the given trajectory. According to the equation, the selection of robot motor and parts can be checked, which lays the foundation for the design of robot controller.
Numerical simulation analysis
The structural parameters of the wall-climbing robot shown in Figure 1 are shown in Table 1. The numerical simulation is carried out on a PC with Intel Core i5 CPU, 3.20 GHz basic frequency, and 4.00 GB RAM. The Simulink platform of software MATLAB 2019a is used in the simulation. The fourth-order Runge Kutta integration method with fixed step size is used to the simulation calculation, and the integration step size is 0.001 s. The simulation time for circular and 8-shaped trajectories is set to 20 and 30 s, respectively.
Physical parameters of the wall-climbing robot.

If at the initial time of

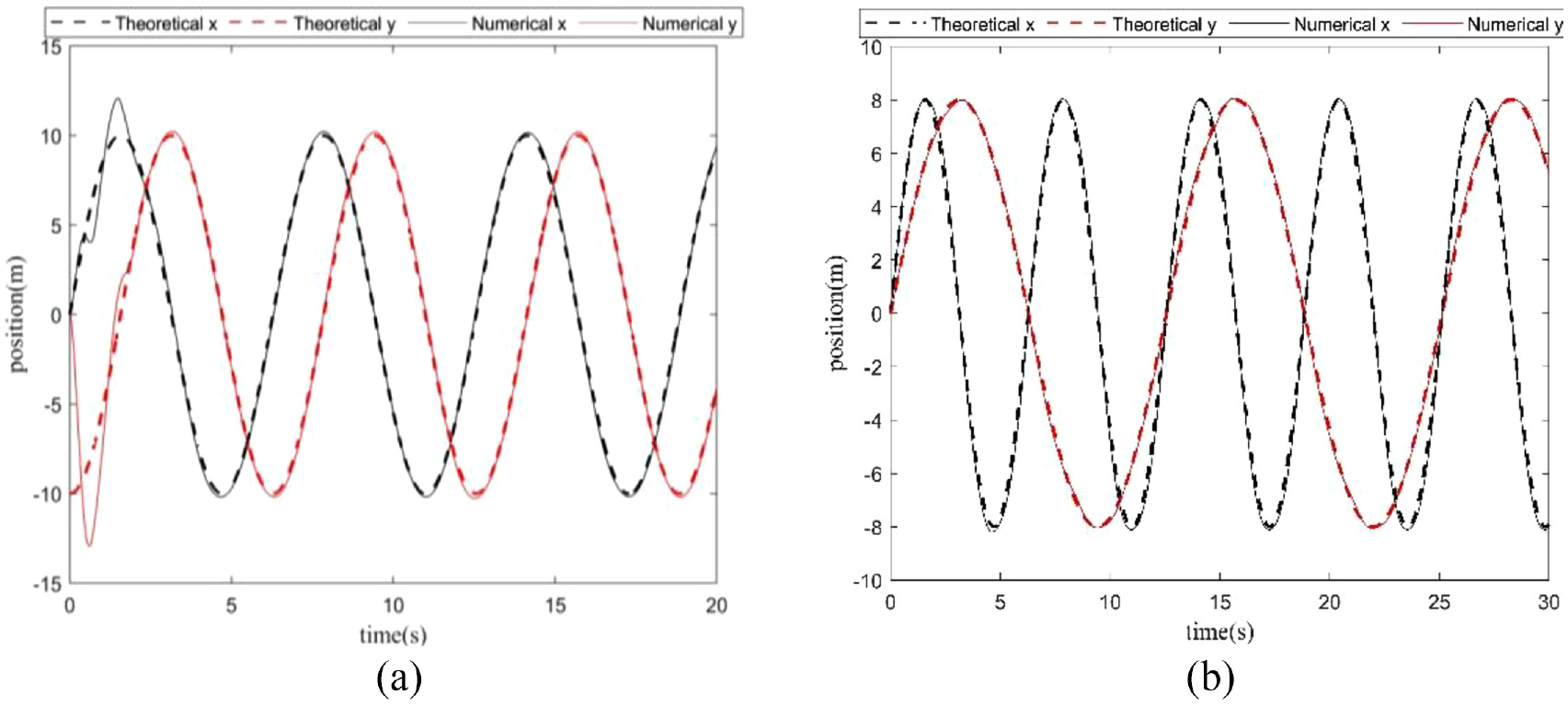
Numerical trajectories of the robot along coordinate axes of the wall coordinate system: (a) circular trajectory and (b) “8-shaped” trajectory.
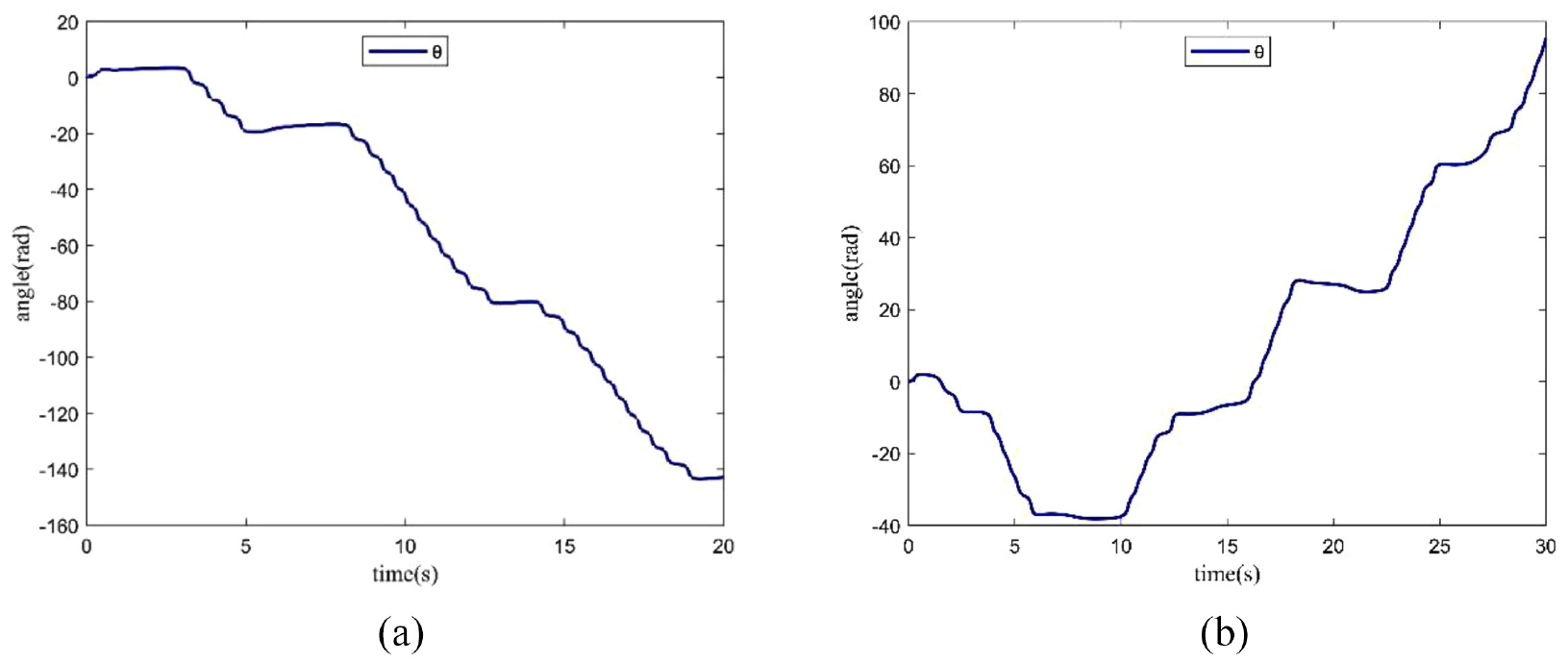
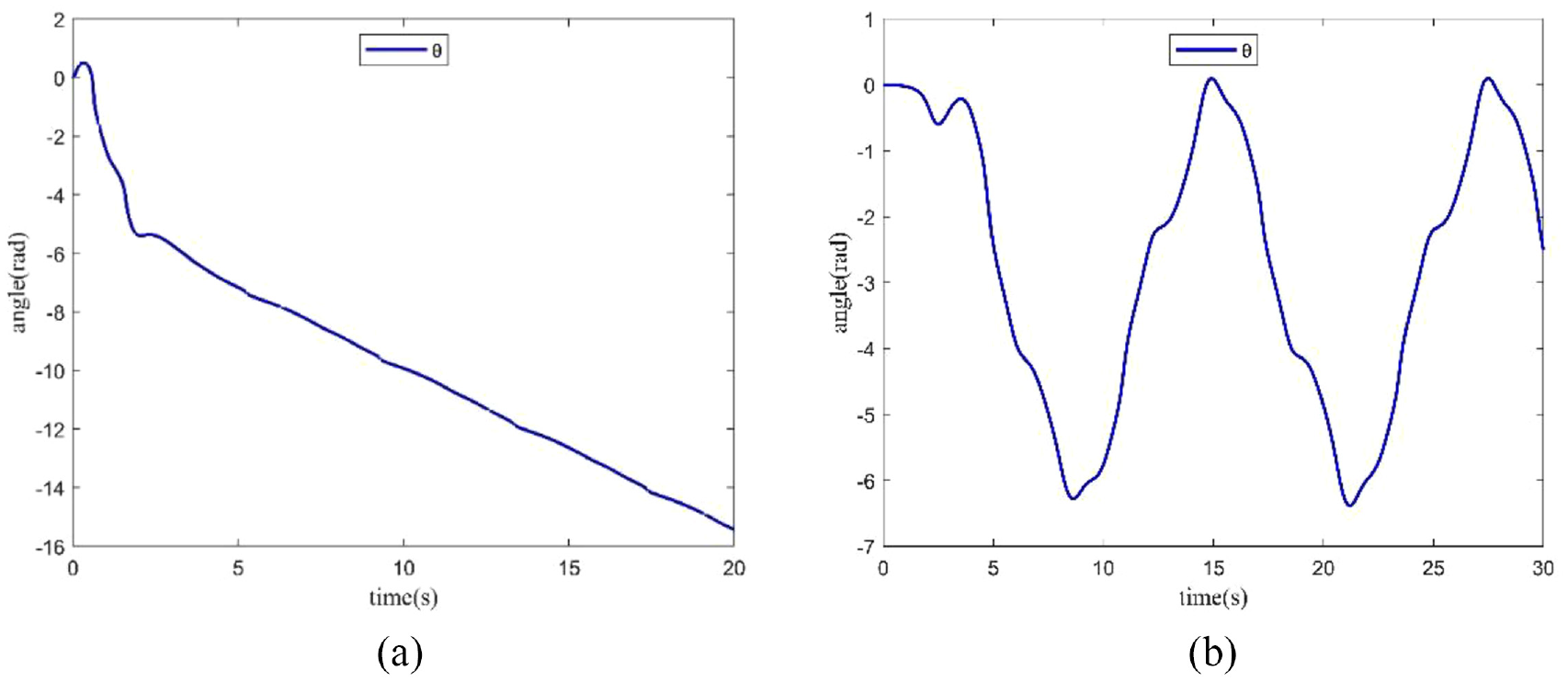
The change curve of the robot attitude angle

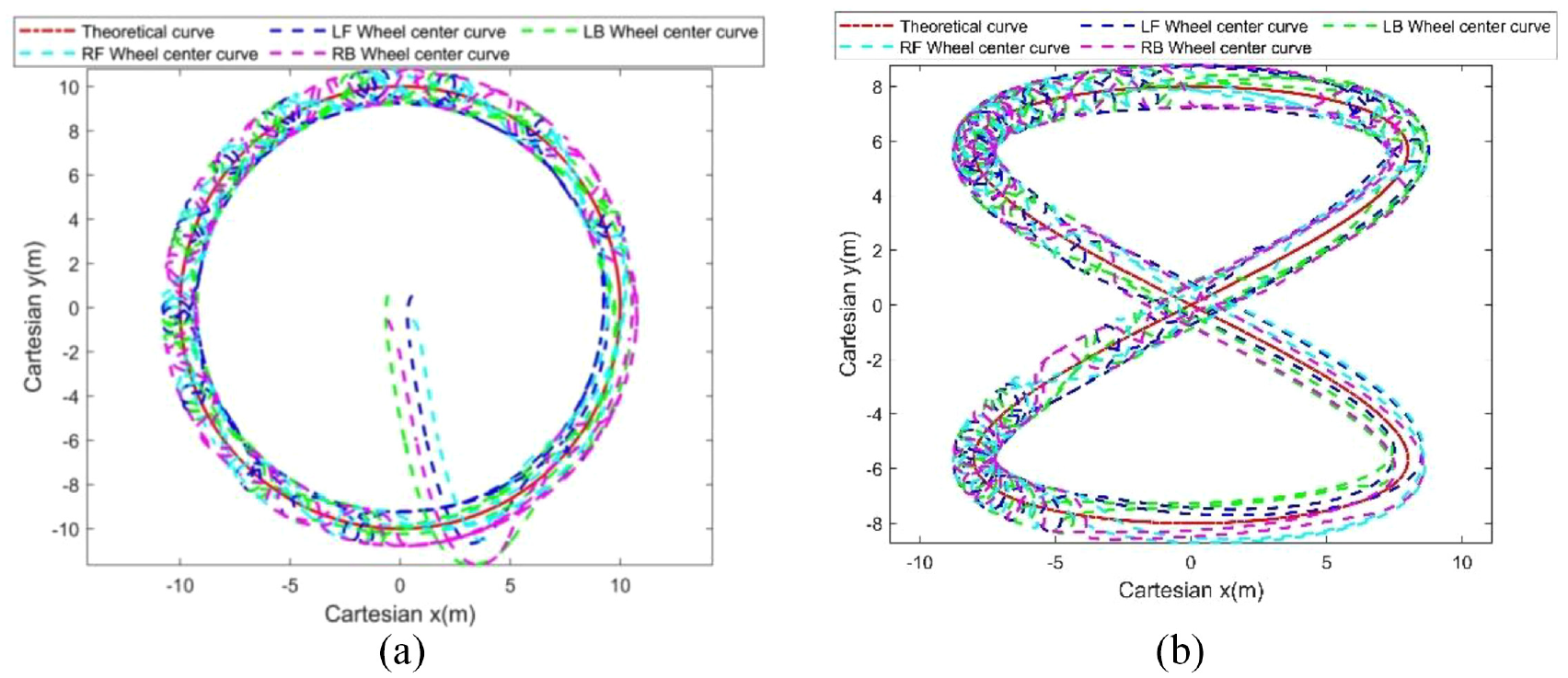
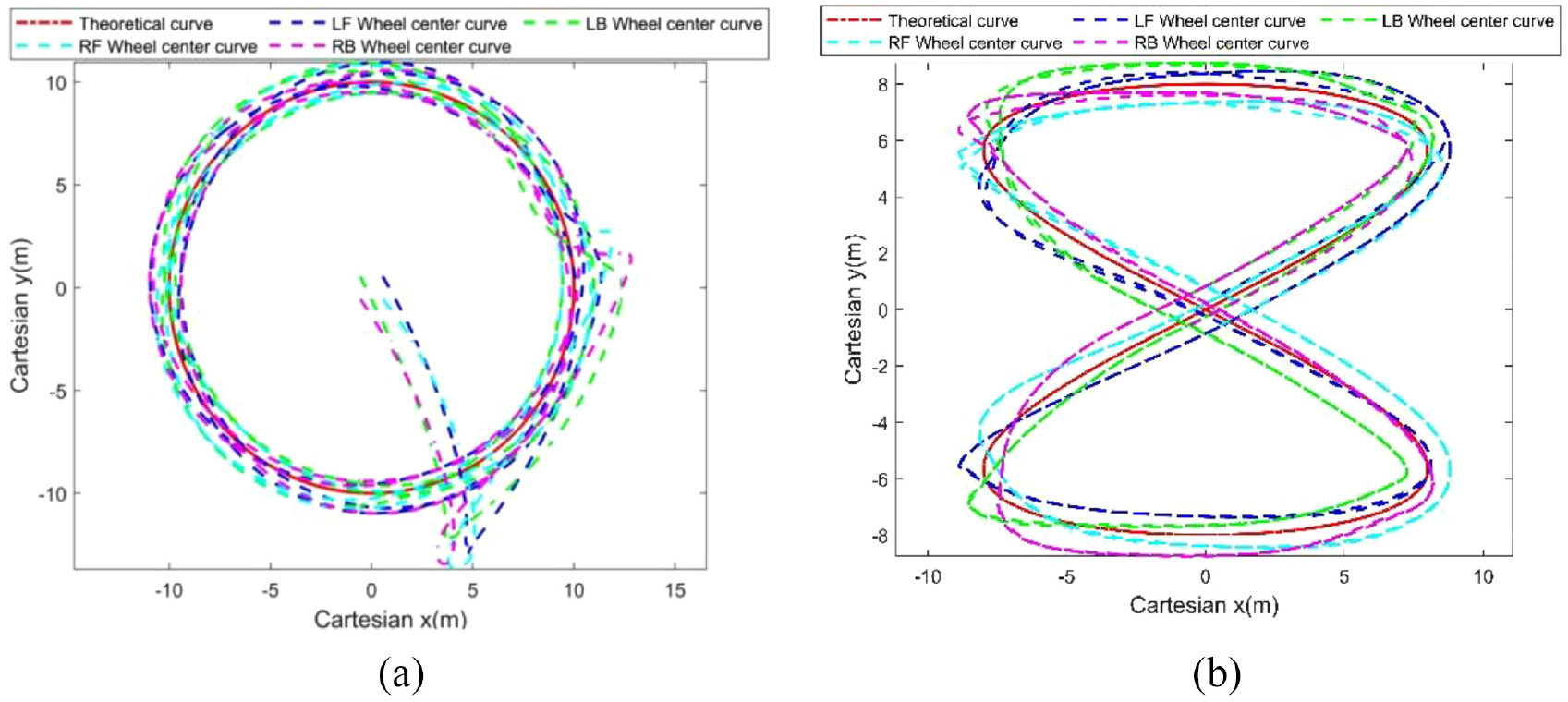
The trajectory of the robot geometric center in the wall coordinate system: (a) circular trajectory and (b) “8-shaped” trajectory.

The error between the trajectory of the robot geometric center and the desired theoretical trajectory: (a) circular trajectory and (b) “8-shaped” trajectory.
Position trajectories of four wheels in the wall coordinate system: (a) circular trajectory and (b) “8-shaped” trajectory.

Constraint forces of the wall-climbing robot on the wall: (a) circular trajectory and (b) “8-shaped” trajectory.
Figure 4 shows the relationship between the numerical solution of the dynamic equation of the wall-climbing robot and the desired theoretical trajectory in the wall coordinate system. The black dotted line in the figure represents the theoretical curve of the geometric center
From Figures 4 to 9, It could be seen that:
(1) When implementing the 8-shaped trajectory simulation, the given initial conditions are compatible with the constraint requirements. Baumgarte stability could correct integration errors so that trajectory tracking errors remains within a small range during simulation.
(2) When implementing the circular trajectory simulation, the Baumgarte stability method could gradually move the geometric center of the wall-climbing robot from the initial position that is incompatible with the constraint requirements to the expectancy theory trajectory and maintain it.
(3) There is no specific requirement for the robot attitude in the current task. When moving along different trajectories, the variation of the
(4) There are no other external structural constraints applied to the wall climbing robot, which means that only four universal idlers are installed at the corresponding positions of the body. The robot is subjected to forces in the
(5) The constraint torque related to the attitude exerted on the wall-climbing robot is relatively small relative to forces of coordinate axis directions in the wall coordinate system.
Trajectory tracking of the robot with constraints from synchronous toothed belts
Velocity analysis under constraints of synchronous toothed belts
The wheels on the left and right sides of the wall-climbing robot are constrained by synchronous toothed belts. Therefore, the speeds of front and rear wheels on both sides are equal, so


where
Taking the derivatives of equations (27) and (28) with respect to time, and substituting the derivative results into equations (48) and (49), respectively. The substituted equations are derived with respect to time again. Equations could be obtained as

in equations (50) and (51)



According to the Udwadia-Phohomsiri modeling method, the constraint equation could be obtained as

in which


The constraint equation shown in equation (55) could make the speeds of the driving wheels on the left and right sides of the wall-climbing robot equal respectively, which is equivalent to that the moving wheels on both sides of the wall-climbing robot are constrained by the synchronous toothed belt structure. The whole driving module of the constrained robot still could rotate in all directions on the wall.
Dynamic model of the robot with constraints from synchronous toothed belts
By combining the trajectory constraint equation (43), which modified by stability correction, with the constraint equation (55). The constraint equation could be obtained as

in which,


According to the Udwadia-Phohomsiri equation, the dynamic model of the wall-climbing robot with synchronous toothed belt constraints could be obtained as

where

The equation of the constraint force which applied on the wall-climbing robot system could be described as

Numerical simulation of the robot with constraints from synchronous toothed belts
Structure constraints from synchronous toothed belts are applied to the robot, the dynamic equations (61) and (63) are solved by using the same configuration parameters as those in section “Numerical simulation analysis.” Some numerical simulation results are shown in Figures 10 to 12.

The change curve of the attitude angle

Position trajectories of four wheels in the wall coordinate system, which obtained by solving the dynamic equation with synchronous tooth belt constraints: (a) circular trajectory and (b) “8-shaped” trajectory.

Constraint forces of the wall-climbing robot with synchronous tooth belt constraint to perform the desired trajectory tracking task: (a) circular trajectory and (b) “8-shaped” trajectory.
Figure 10 shows, when the synchronous toothed belt constraints applied, the change curve of
Figure 11 shows position trajectories of four wheels in the wall coordinate system, which obtained by solving the dynamic equation. Comparing Figure 11 with Figure 8, it can be seen that trajectory changes present specific regular patterns for the robot’s four wheels relative to its geometric center, and after it is stable near the desired task trajectory, the robot’s attitude does not change significantly in the moving process.
Figure 12 shows the changes of the constraint forces on the wall-climbing robot in order to complete the given trajectory tracking task, when constraints of synchronous toothed belts are applied. Comparing Figure 12(a) with Figure 9(a), it could be seen that the torque/forces required changing the attitude of the wall-climbing robot increases obviously at the initial time, and when it is stabilized near the desired task trajectory, torque/forces required to change on the robot are no longer obvious. From Figures 9(b) and 12(b), it could be seen that in the wall coordinate system, compared to the constraint forces applied to the robot along the coordinate axes, the constraint torque related to the attitude exerted on the robot is very small.
Trajectory tracking of the robot with non-lateral motion constraint
Analysis of the robot with non-lateral motion constraint
When the wall-climbing robot moves on the wall, there is no lateral movement in Y direction. The left or right sides driving wheels are controlled to rotate synchronously or differentially to realize the straight or turning movement of the robot. The constraint of the robot with non-lateral motion could be expressed as

By deriving equation (64) relative to time, the equation could be obtained as

The constraint equation could be obtained as

in which,


The constraint equation (66) could make the geometric center of the robot move only in the direction of
Analysis of driving forces
From the relationship between the rotational speeds of left and right wheels and the speed of the robot in the wall coordinate system, the equation can be obtained as
Equation (69) could be arranged as

The Jacobian matrix between the rotational speeds of wheels on both sides and the velocity of the robot on the wall could be obtained as

The relationship between the wheel driving forces on both sides of the robot and the wall constraint force could be obtained from

Through equation (72), the wheel driving forces of both sides of the wall-climbing robot can be obtained.
Dynamic model of the robot with structural constraint of non-lateral motion
By combining the constraint equation (58) with the non-lateral sliding constraint equation (66), the constraint equation could be obtained as

where


According to the Udwadia-Phohomsiri equation, the dynamic model of the wall-climbing robot with constraints can be obtained as

where

The required constraint force on the wall-climbing robot system can be expressed as

Combined with equation (72), the driving forces which need to be applied on two side wheels of the wall-climbing robot can be obtained.
Numerical simulation of robot with the structural constraint of non-lateral motion
When the robot is also constrained by the non-lateral motion structure, by using the same configuration parameters as in section “Numerical simulation analysis,” the dynamic equations (76), and (78) could be solved. The driving forces applied to the wheels on both sides of the robot moving along the task trajectory could be obtained by equation (72). Some numerical simulation results are shown in Figures 13 to 19.

The change curve of the attitude angle

The trajectory of the geometric center of the robot with non-lateral motion constraint: (a) circular trajectory and (b) “8-shaped” trajectory.

The error between the trajectory of the geometric center of the robot with non-lateral motion constraint and the desired theoretical trajectory: (a) circular trajectory and (b) “8-shaped” trajectory.

Position trajectories of four wheels obtained by solving the dynamic equation with the non-lateral motion constraint: (a) circular trajectory and (b) “8-shaped” trajectory.

Constraint forces of the robot with the non-lateral motion constraint to perform the desired trajectory tracking task: (a) circular trajectory and (b) “8-shaped” trajectory.

Driving force on the left wheel of the wall-climbing robot: (a) circular trajectory and (b) “8-shaped” trajectory.

Driving force on the right wheel of the wall-climbing robot: (a) circular trajectory and (b) “8-shaped” trajectory.
Figure 13 shows the change curve of the angle θ between the xp axis in the local coordinate system and the X axis in the wall coordinate system, when the structure constraint of non-lateral motion is applied to the robot. Figure 14 shows the trajectory curve of the numerical solution of the dynamic equation in the wall coordinate system after the structural constraint is applied, and the trajectory curve of the desired task. Figure 15 shows the error curve between the numerical trajectory of the center point of the robot and the desired trajectory task. Figure 16 shows trajectories of four wheels in the wall coordinate system, which obtained by solving the dynamic equation of the wall-climbing robot with structural constraints. Figure 17 shows the constraint force curves of the wall-climbing robot on the wall surface when the structure constraints are applied to complete the task of moving along the desired trajectory. Figures 18 and 19 show the driving forces to be applied on the left and right wheels of the wall-climbing robot, which are solved by equation (72).
From Figures 13 to 19, It could be seen that:
(1) The angle θ changes from 0 is smaller than that in Figure 10.
(2) Comparing Figure 14 with Figure 6, Figure 15 with Figure 7, it can be found that, if the values of violation stability parameters
(3) Comparing Figure 16(a) with Figure 11(a), the required distances increase significantly for four wheels from the initial state to the stable state. Combining Figures 11(b) and 16(b), there is no obvious change after the center of the robot stable near the desired trajectory.
(4) Comparing Figure 17(a) with Figure 12(a), it can be found that constraint forces required for the initial state of the robot obviously smaller. Combining Figures 12(b) and 17(b), the change ranges of constraint forces are basically the same when the robot stable at the desired constraint trajectory.
(5) In Figures 18(a) and 19(a), the right wheel driving force is positive and the left wheel driving force is negative at the initial state, to complete the rotation of a small angle. The peak driving torque of the right wheel is larger than that of the left wheel.
Trajectory tracking of the robot under the nonslip constraint between wheels and wall
Constraint analysis of nonslip between wheels and wall
When the wall-climbing robot moves on the wall, the friction coefficients between different wall materials and robot wheel materials are different. It is inevitable that there would be axial or lateral slip between the wheel and the wall. The slip between wheels and the wall involves the wall structure, slip rate and other related problems. In order to simplify the model, it is assumed that there is only rolling constraint between the wheel and the wall.
If the wall-climbing robot does not slide relative to the wall and the driving wheel only rolls on the wall, then


For the relative time derivative of equations (79) and (80), equations can be obtained as


The constraint equation could be obtained as

in which


Dynamic model of the robot under the nonslip constraint between wheels and wall
Combining the constraint equation (73) with the nonslip constraint equation (83), the equation containing the three kinds of constraints could be obtained as

where


According to the Udwadia-Phohomsiri equation, the dynamic model for trajectory tracking of the wall-climbing robot with above three kinds of constraints could be obtained as

where

The required constraint force on the wall-climbing robot system can be expressed as

According to equation (72), the driving forces to be applied to the wheels on both sides of the wall-climbing robot also could be obtained.
Simulation of the nonslip constraint on the wall
When there are nonslip between the driving wheels and the wall surface, the dynamic equations (89) and (91) could be solved by using the same configuration parameters as those in section “Numerical simulation analysis.” The driving forces applied to the wheels on both sides of the robot moving along the task trajectory could be obtained by equation (72). Some numerical simulation results are shown in Figures 20 to 27.
Numerical trajectories of the robot under the nonslip constraint along coordinate axes: (a) circular trajectory and (b) “8-shaped” trajectory.
The change curve of the attitude angle

The geometric center trajectory of the robot under the nonslip constraint: (a) circular trajectory and (b) “8-shaped” trajectory.

The error between the geometric center trajectory of the robot with the nonslip constraint and the desired theoretical trajectory: (a) circular trajectory and (b) “8-shaped” trajectory.
Position trajectories of four wheels which is obtained by solving the dynamic equation also with the nonslip constraint: (a) circular trajectory and (b) “8-shaped” trajectory.

Constraint forces of the wall-climbing robot with the nonslip constraint to perform the desired trajectory tracking task: (a) circular trajectory and (b) “8-shaped” trajectory.

Driving force on left wheel of the wall-climbing robot: (a) circular trajectory and (b) “8-shaped” trajectory.

Driving force on right wheel of the wall-climbing robot: (a) circular trajectory and (b) “8-shaped” trajectory.
Figure 20 shows relationship curves between the numerical solution of the wall-climbing robot and the desired task trajectory in the X and Y coordinate directions of the wall coordinate system. Figure 21 shows the curve of the angle
From Figures 13 to 19, It could be seen that:
(1) Comparing Figure 20 with Figure 4, Figure 22 with Figures 6 and 14, Figure 23 with Figures 7 and 15, the values of violation stability parameters
(2) The
(3) Compared Figure 22(a) with Figures 11(a) and 16(a), the distance from the initial state to the required stable trajectory increases significantly. Combing Figures 11(b), 16(b), and 22(b), when the trajectory tracking stable, the curves of trajectories in Figure (22) are also different from that in Figures 11 and 16.
(4) Comparing Figures 18 and 26, as well as Figures 19 and 27, it could be found that the existence of pure rolling friction constraint causes mutation points on the left and right wheel drive torque curves.
Conclusion
Dynamic modeling is an important part of a robot research and development. Forward dynamics could be used for the robot simulation. Reverse dynamics could provide the basis for the selection of driving motor for the robot, and lay the foundation for the design of the robot structure and control algorithm. Aiming at the problem of constraint processing in the dynamic modeling of the wall-climbing robot, the dynamic modeling method based on the Udwadia-phohomsiri equation is adopted. The main conclusions revealed in the research process are as follows:
(1) The general process of dynamic modeling of the wall-climbing robot with constraints is given. The process can easily model other robots with complex structural constraints.
(2) The task trajectory of the wall-climbing robot is defined. By integrating the trajectory constraints into the dynamic equation of the wall-climbing robot, the dynamic modeling and simulation of the wall-climbing robot without structural constraints are implemented. The simulation results show that the established dynamic model is consistent with the actual situation.
(3) The structure constraint models of the wall-climbing robot, such as synchronous toothed belt, non-lateral motion, and nonslip between the driving wheels and the wall surface, are constructed. Combining the unconstrained wall-climbing robot model with trajectory constraints, structural constraints, and environmental constraints, the dynamic model of wall-climbing robot with constraints is gradually constructed. Numerical simulation results show that the constructed constraints of the wall-climbing robot are reasonable and correct.
At present, the main research and analysis are the nonholonomic constraints related to the structure and ideal environment of the wall-climbing robot. In the future, we will continue to discuss the non-ideal constraints modeling problems such as the friction between the wheels of the wall-climbing robot and the wall surface, and use the robot physical experiment to verify them.
Footnotes
Handling Editor: Chenhui Liang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by a grant from the NationalKey R&D Program of China(No.2019YFB1600700). The name of the funded project is “Service status evaluation and intelligent maintenance technology and equipment for cross sea cluster facilities”.