
Abstract
Mechanical equipment often works on variable speed condition, its corresponding vibration signal presents multi-component, modulation coupling with fast time-varying instantaneous frequency (IF), how to effectively compute IF and realize fasting varying non-stationary signal decoupling separation plays an important role in mechanical system fault diagnosis. In this paper, a sparse representation method called multi-scale chirp sparse representation (MSCSR) is introduced to identify, extract, and trend IF for achieving a highly concentrated time-frequency energy. Simulation demonstrates that the proposed method performs better than traditional IF estimation method. Furthermore, an adaptive time-varying filter is constructed using the extracted instantaneous frequency to decouple non-stationary fast signal. Ultimately, by rapid instantaneous frequency fluctuation experiment, the effectiveness of proposed method for fast strong time-varying signal is validated, it can effectively extract rapid oscillation instantaneous frequency, and the error is less than 10%.
Keywords
Introduction
Mechanical equipment under variable speed condition is almost everywhere, such as gearbox under raising speed, its fault vibration signal often reflects multi-component coupling non-stationary property with fast IF. As a result, how to separate fast varying signal based on IF estimation has become a critical requirement for vibration-based mechanical equipment condition monitoring methods.
In general, the existing signal processing methods are majorly applicable to the steady speed working condition. 1 Under variable speed, the fault vibration signal will lose the periodic regularity, and present the frequency modulation, amplitude modulation property, leading to the invalidity of classical methods. 2 With the development of non-stationary signal processing technology, scholars have gradually carried out research on the mechanical fault vibration signal separation.3,4 In general, they can be divided into four universal categories, order tracking, 5 order cyclostationary analysis 6 and time-frequency analysis, 7 tine-varying filter. 8
As for order tracking, 9 its main procedure is to transform non-stationary signal into stationary or cyclically stationary signal by equal interval sampling technology in angle domain, so as to establish a bridge between signal processing under variable speed condition and constant speed condition, so that the classical signal processing method can play its role again. However, it must be pointed out that the implementation of order tracking mostly relies on hardware device such as encoder or key phase sensor, nevertheless, in some critical condition, as sensor cannot be installed which brings challenges to order tracking implementation. Under this background, scholars propose tacholess order tracking (TLOT) method, 2 it can directly achieve order tracking on non-stationary by using time-frequency transformation without hardware, but it still needs to be further improved, mainly in terms of accurately tracking and estimating instantaneous frequency. As instantaneous frequency reflects the dynamic state of mechanical equipment, so improving the estimation accuracy of IF becomes the core of TLOT. Furthermore, considering the structure of most mechanical parts has spatial symmetry, its fault vibration signal presents essentially cyclostationary in the angle domain, by using order tracking and synchronous averaging, we can convert the non-stationary signal in time domain into cyclostationary signal in angle domain again and establish order cyclostationarity analysis 10 ultimately which is convenient for processing mechanical varying non-stationary signal, such as order spectrum, 11 order cepstrum, 12 envelope order spectrum, 13 order bispectrum, 14 and high-order spectrum. 15 As for time-frequency analysis, considering only from the time domain or frequency domain, we can not obtain the instantaneous time-frequency property which is the core of non-stationary signal processing, 16 the time-frequency analysis provides the joint distribution information in the time domain and frequency domain which can effectively give attention to both time resolution and frequency resolution, it is very suitable for estimating instantaneous frequency and separating mechanical varying non-stationary signal. Finally, as for time-varying filter, 17 its center frequency needs to match the instantaneous frequency and its parameters also should be set reasonably to achieve mechanical varying non-stationary signal separation.
In conclusion, instantaneous frequency estimation plays an important role in non-stationary signal decomposition. A series of methods have been introduced to achieve this goal, such as reassignment synchrosqueezing transform, 18 multi-scale chirplet path, 19 short-time Fourier transformation, 20 considering the application of MSCSR on nonlinear FM signal estimation, 21 parameter identification of linear time-varying SDOF system, 22 in this paper, we introduce it to estimate IF in mechanical varying non-stationary signal whose matched estimator is constructed according to fast varying IF, so as to improve the signal time-frequency representation energy aggregation. On the basis, by using the extracted IF acting as center frequency of the filter, we design a adaptive time-varying filter for decomposing mechanical varying non-stationary signal ultimately.
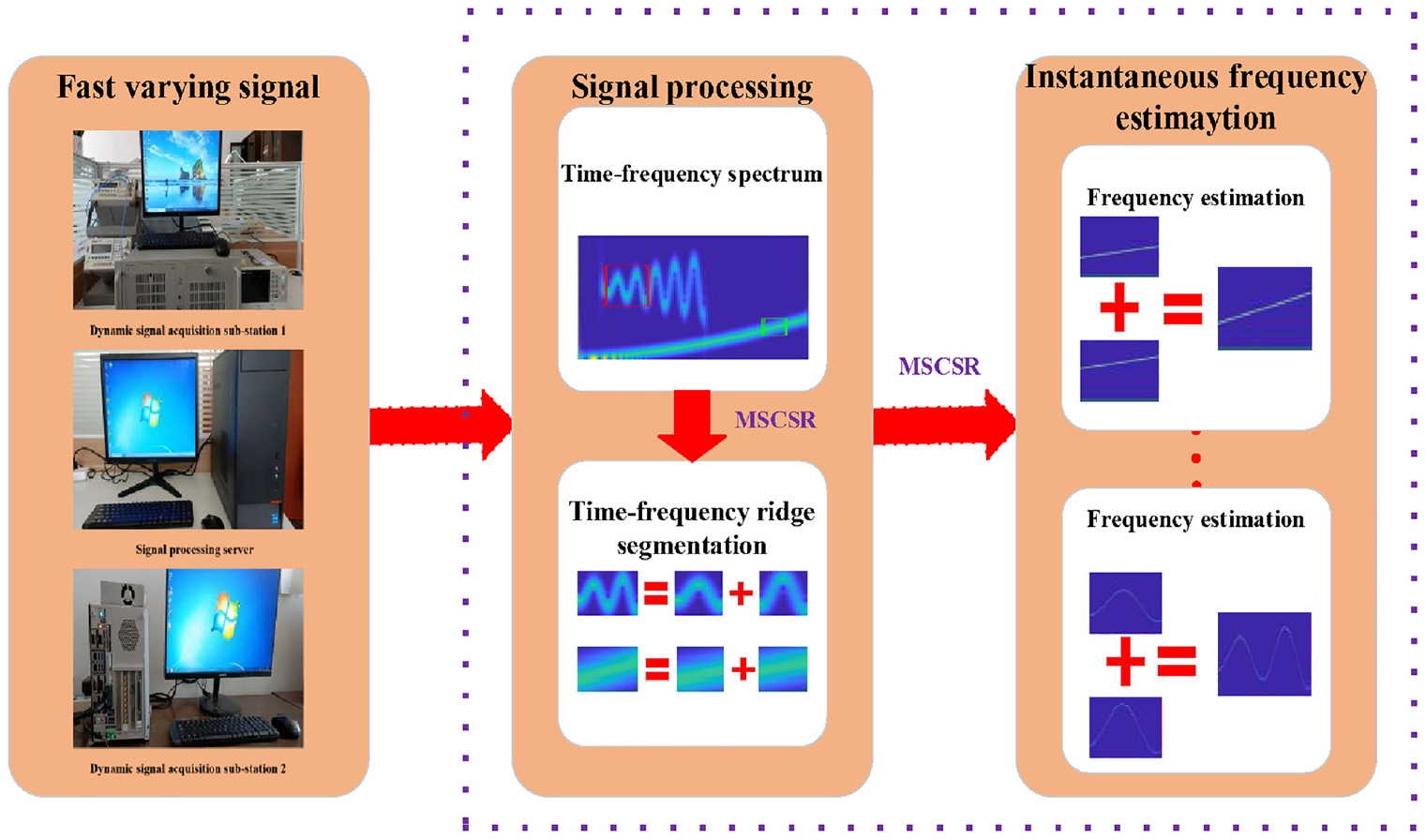
Finally, the process diagram of proposed methodology is presented in Figure 1. Firstly, the continuous wavelet transform is applied to obtain corresponding wavelet energy spectrogram, and then the number of sub-signal component in vibration signal is accurately judged according to the time-frequency distribution, which greatly improves the calculation efficiency. Secondly, MSCSR self-adaptive selects an appropriate dynamic time support region according to the IF varying law, tracks, and estimates the IF of sub-signal component which possesses largest energy. Finally, an adaptive time-varying filter is designed using estimated IF as the center frequency, and is applied for decomposing vibration signal into several independent components. A simulation and mechanical system high speed fluctuation experiment is to validate the proposed method, and compared with IF recognition result and signal decomposition result by using Hilbert-Huang transform (HHT), 23 continuous wavelet transform (CWT), 24 synchrosqueezing wavelet transform (SWT), 24 variational mode decomposition (VMD), 25 empirical mode decomposition (EMD) 26 respectively, the proposed method has a better effectiveness and accuracy.

Flow chart of proposed method in this paper.
An adaptive time-varying filter based on instantaneous frequency estimation
The key steps of proposed methodology as shown in Figure 1, are discussed in this section. The basic function library of MSCSR for tracking and estimating IF is shown as following.

In the above formulas, D represents base function library,

The multi-scale chirp basic function is applied to project fault response signal segment by segment, and calculating projection coefficient βI and corresponding basic function

At the same time, the corresponding projection coefficient set and basic function set are shown in following.

The steps of the connection algorithm Π in MSCSSD can be summarized as follows.
Step 1: Initialization. i represents the serial number of sub-signal dynamic time support region,
Step 2: For every dynamic time support region

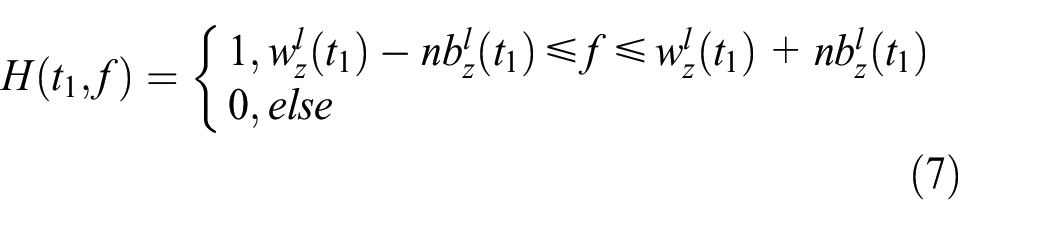
There is the following formula,

The dynamic linking algorithm called Π guarantees extracted sub-signal connected by basic function set H over the entire dynamic time support region set
The implementation process of instantaneous frequency estimation based on proposed method.
Considering adaptive time-varying filter is based on classical filter, the proposed adaptive time-varying filter based on MSCSR can make its center frequency consistent with estimated IF according to the mechanical varying non-stationary signal. As the signal often presents obvious amplitude modulation and frequency modulation phenomenon, we can make the estimated IF that it is corresponding to carrier frequency acting as center frequency and side frequency act as cut-off frequency respectively. Therefore, an adaptive filter H(s,t) design algorithm based on MSCSR is proposed in this paper, it can be obtained by transferring classical low-pass prototype filter H(s). As its central frequency and filter bandwidth can automatically vary according to the non-stationary property, as a result, it is very suitable for mechanical varying non-stationary signal separation and the design procedures is shown in Figure 3.
Step 1: As for signal
Step 2: Obtaining the spectrum
Step 3: In order to extract sub-signal
Step 4: The adaptive time-varying filter

Step 5: The IFFT transformation is used to obtain corresponding sub-signal
Step 6: Repeating above procedures from step 1 to step 5, and achieving signal separation

Design flow of adaptive time-varying filter.
Simulation analysis
In order to analyze the effectiveness of proposed method on varying non-stationary signal decomposition, a simulation signal x(t) containing three sub-signals is presented in formula (9). Considering actual noise effect, adding 20% SNR level Gaussian white noise


Firstly, we use the wavelet spectrum by using continuous wavelet transform to observe the number of sub-signals as shown in Figure 4. It can be significantly seen that the simulation signal contains two sub-signals and their varying IFs conform to linear varying trend, and mainly concentrate in the range of [0 Hz, 40 Hz] and [0 Hz, 128 Hz].

The wavelet scalogram of simulated signal.
Secondly, we apply the MSCSR to estimate IFs. We set the frequency variation range on MSCSR is from 10 to 400 Hz, fmin = 30 Hz, fmax = 300 Hz, search frequency slope is ranging from 0 to 200 Hz, search resolution is 1 Hz/s, and the extracted IFs fextract1 (t), fextract2 (t) are shown in Figure 5(b) and (d) respectively.

Estimated instantaneous frequency value by using MSCSR: (a) time-frequency representation of signal component
Time-frequency representation in Figure 5(a) and (c) present the varying law of instantaneous frequency in
For comparison, we also uses Hilbert-Huang Transform (HHT), Continuous Wavelet Transform (CWT), synchrosqueezing wavelet transform (SWT) to extract IF, as shown in Figure 6. Compared Figure 5 with Figure 6. It can be clearly seen that the tracking effect by using CWT in the beginning and end stages has certain deviation, and estimated value has a large fluctuation phenomenon. On the other hand, although SWT can achieve the tracking in general, the accuracy is not high. As for HHT, as IF presents a linear varying trend, it can not effectively achieve tracking, this phenomenon implies that the existing methods can not be effectively used to estimate IF under large fluctuation background, while the estimated IF based on MSCSR is more consistent with theoretical value, which indicates the proposed method in this paper adopts multi-scale chirp basic function whose parameters are adjustable, can dynamically and self-adaptive track and estimate fast varying IF.

The instantaneous frequency extracted by CWT, HHT, and SWT: (a) instantaneous frequency estimation of signal component
Furthermore, in order to quantify IF identification accuracy, we adopt root mean square (RMS) to act as precision index (Index of accuracy, IA).

Table 1 shows corresponding IA values by using four methods, MSCSR, SWT, CWT, and HHT, IA1 and IA2 represent the recognition accuracy of sub-signals
IA index identification effect of instantaneous frequency on simulation signal

In order to further verify the anti-noise ability and accuracy of proposed method on instantaneous frequency estimation under strong noise, compared with SWT, CWT, and HHT, we add different SNR level Gaussian white noise

IA value of instantaneous frequency estimation under different SNR value: (a) IA value of instantaneous frequency estimation of signal component
Through above simulation signal, the advantage of proposed method in IF tracking has been preliminarily validated, and it has potential application value in non-stationary signal separation based on filter technology. Considering that the actual mechanical equipment often run in large speed fluctuation condition, its IF often presents curvilinear varying trend. As a result, we simulate a mechanical varying non-stationary signal as shown in formula (12). It contains two sub-signals s1(t) and s2(t), they reflect modulation property and their instantaneous frequencies are overlapping as shown in formula (13) and (14),




Time domain waveform of simulation signal.
It can be seen that the simulation signal



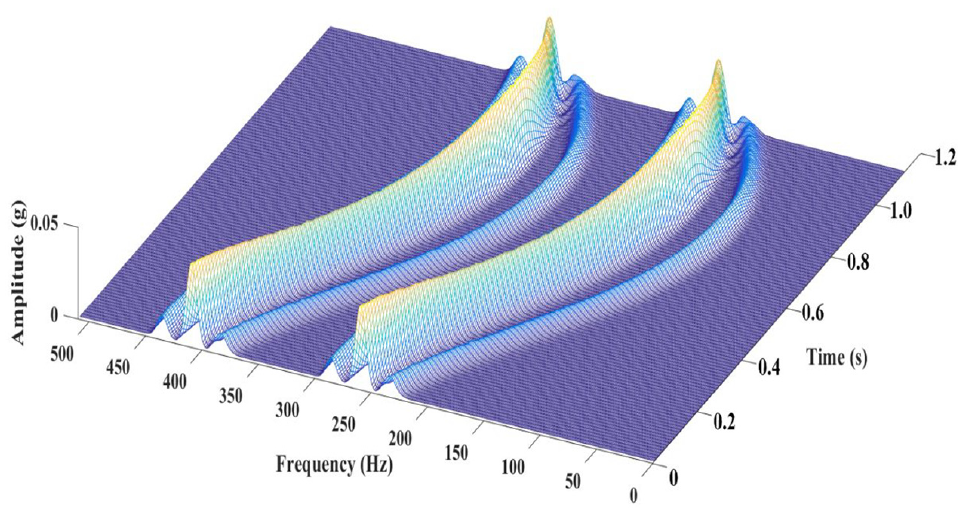
Considering the simulation signal

STFT spectrum of simulation signal.
Amplitude-frequency response of simulation signal.
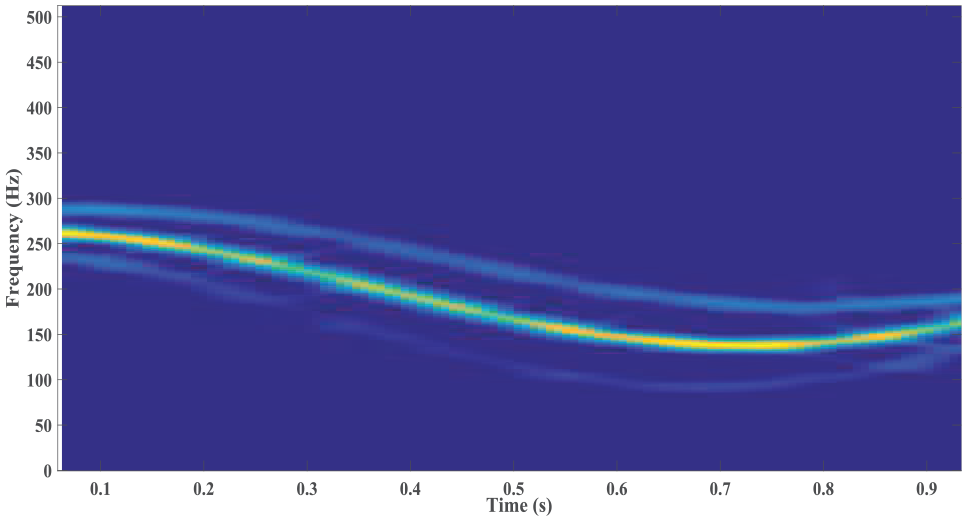
Considering above issues, we apply the proposed method on simulation signal to identify instantaneous carrier frequency, the estimated frequency fextract1(t), fextract2(t) and correspondingly theoretical carrier frequency f1(t), f2(t) are shown in Figure 11. It can be seen that the proposed method in this paper also has good tracking accuracy for fast varying instantaneous frequency, as a result, other four side-band frequencies f1(t)−fb(t), f1(t) + fb(t), f1(t)−fb(t), f2(t) + fb(t) are also estimated respectively.

Time-frequency ridge line of signal components by MSCSR.
Additionally, a time-varying filter

Amplitude-frequency response of time-varying adaptive filter
Considering amplitude-frequency property of simulation signal

Filtered result by time-varying adaptive filter
Considering the adaptive decomposition method owns unique advantage without presetting basis function, we select empirical mode decomposition (EMD), variational mode decomposition (VMD) for comparison as shown in Figure 14. It can directly see that the number of sub-signals obtained by adaptive decomposition method is not equal to real number, and each sub-component presents modulation attribute, which indicates that the decomposition results reflect aliased phenomenon. In conclusion, we can know that when the signal has a fast varying IF, adopting signal decomposition based on presetting a series of basis functions will be more realistic.

Decomposition result by VMD and EMD: (a) VMD decomposition, (b) amplitude-frequency spectrum corresponding to VMD decomposition, (c) EMD decomposition and (d) amplitude-frequency spectrum corresponding to EMD decomposition.
Experimental application
In this section, we use the collected rolling bearing fault vibration signal under variable speed condition as shown in Figure 15 to validate the accuracy of the proposed method on instantaneous rotating frequency estimation. The rolling bearing fault test platform is composed of AC motor, motor speed controller, rotating shaft, loading system and experimental rolling bearing, NI CompactDAQ. It can carry out rolling bearing fault experiment under different rotating speeds. The test rolling bearing is 52732QT and we adopt electric discharge machining to cause outer ring damage. Here, we generate two non-stationary signals, whose instantaneous rotating frequencies are in accordance with fast linear varying trend and sinusoidal varying trend respectively.

Experimental bench for instantaneous frequency.
Firstly, we collect the fault vibration signal with linearly varying frequency as shown in Figure 16 and the rotating speed increases from 900 to 1080 rad/min in 6 s. Furthermore, except the proposed method in this paper, we also use several different methods to analyze the signal and estimate its instantaneous frequency, the result is shown in Figure 17.
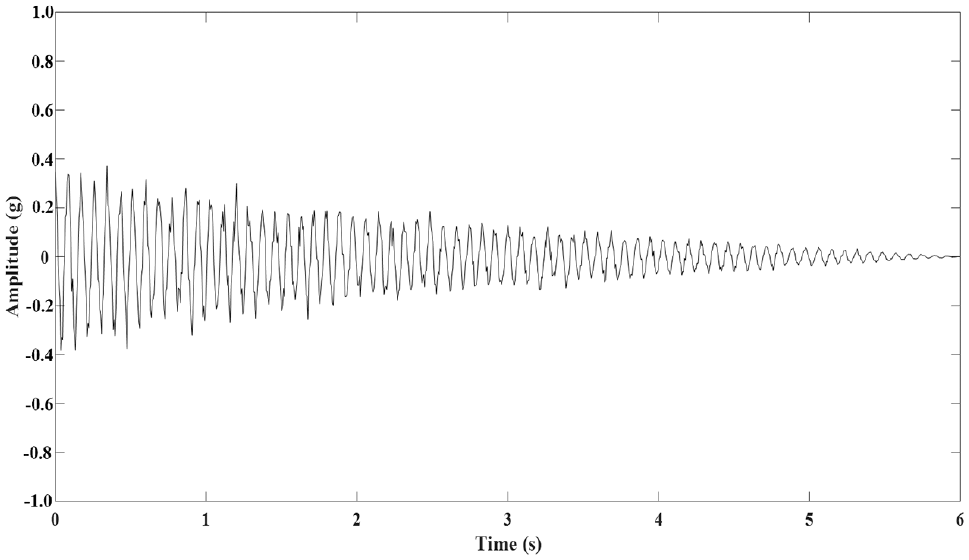
Fault vibration signal with linearly varying instantaneous frequency.

The identified instantaneous frequency by using different methods.
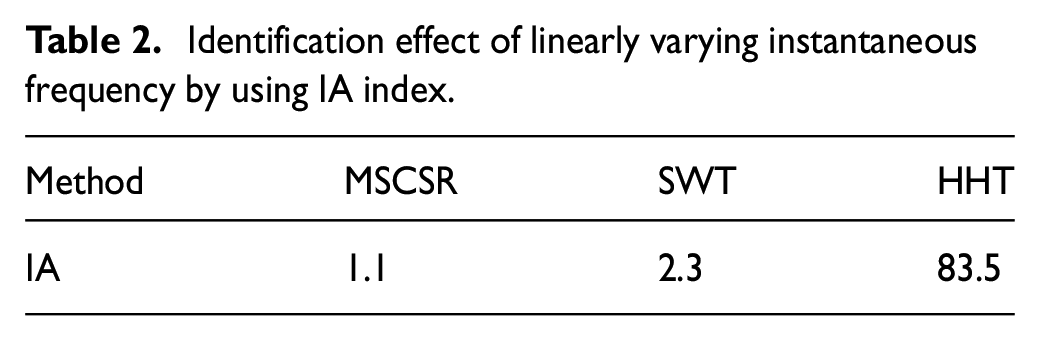
It can be obviously seen from Figure 17 that except HHT, the estimated values corresponding to other methods can well match with the theoretical result. Moreover, the proposed method performs best in estimation accuracy, this conclusion can also be proved by the IA index as shown in Table 2.
Identification effect of linearly varying instantaneous frequency by using IA index.
On the other hand, we analyze another fault vibration signal as shown in Figure 18 under a large speed fluctuation condition which presents sinusoidal varying instantaneous frequency, and the estimated IF is shown in Figure 19.
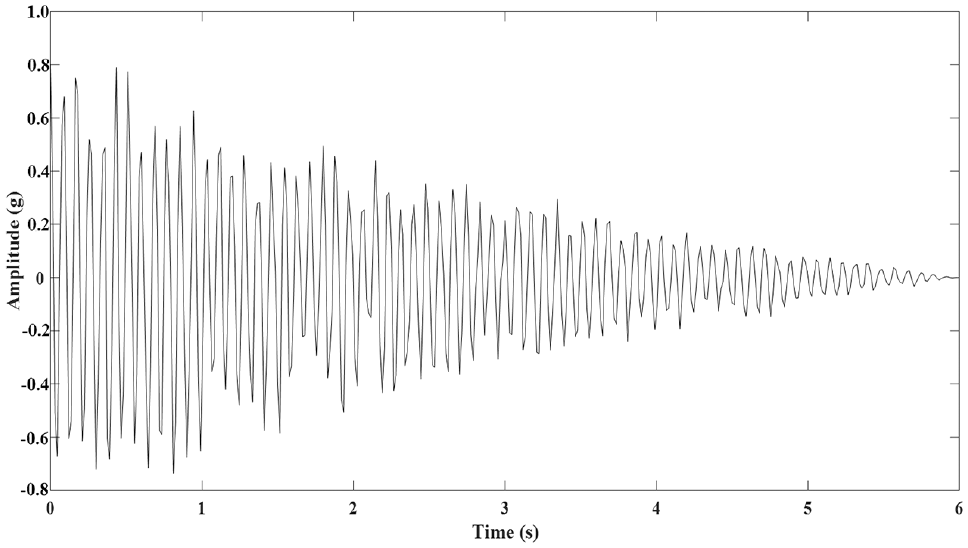
Fault vibration signal with sinusoidal varying instantaneous frequency.

The identified instantaneous frequency presenting sinusoidal varying feature.
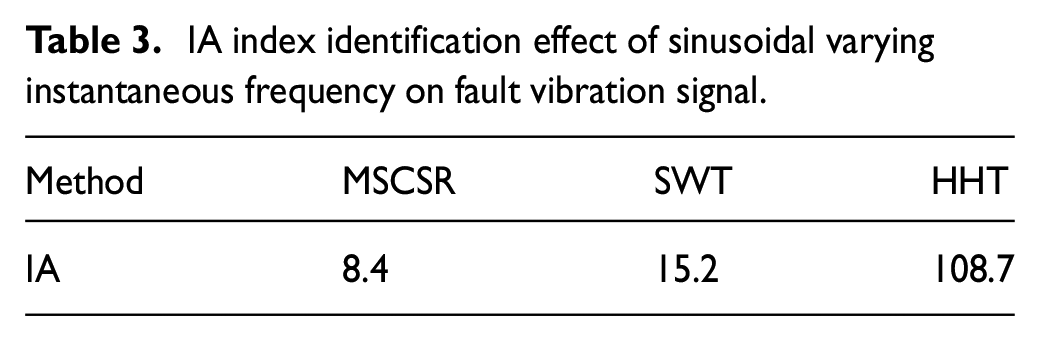
Although there is a certain deviation between the instantaneous frequency value identified by proposed method and theoretical value, it is basically consistent with theoretical value on the trend, and the recognition effect is obviously better than SWT and HHT. Although SWT can also identify the corresponding trend, the estimated instantaneous frequency curve still contains a lot of burrs. Besides, the IA value in Table 3 also can prove above conclusion. Furthermore, in order to evaluate the efficiency of proposed method in experiment, we set another evaluation index, which is the calculation time t, Table 4 shows the consumed time by each methods. We can see that the proposed method in this paper has certain advantage in computational efficiency, which indicates that the MSCSR can be applied to the field of rotating machinery online monitoring.
IA index identification effect of sinusoidal varying instantaneous frequency on fault vibration signal.
Computing time of different methods on instantaneous frequency estimation.

Considering that the rotating machinery works under the large speed fluctuation condition, its instantaneous rotating frequency often reflect significantly non-linear property, in order to solve this problem, we can divide the instantaneous frequency into a series of segments for converting the global non-linearity into local linearity, or we can use polynomial frequency factor instead of linear frequency factor in MSCSR whose formula is
Conclusion
An adaptive time-varying filter design method based on instantaneous frequency estimation is proposed and applied for achieving mechanical varying non-stationary signal separation. The proposed method is also validated by simulation signal, compared with other algorithms, the accuracy of proposed method is proved. Finally, an instantaneous rotating frequency estimation experiment based on rolling bearing fault vibration signal verifies application reliability. The main conclusion of this article is as follows.
(1) As the mechanical fault vibration signal presents significantly fast varying instantaneous frequency and multi-component coupling modulation property, considering the multi-scale chirp basic function has the advantage of high performance computing, high accuracy, and strong noise resistance, the MSCSR using this basis function can effectively extract the instantaneous frequency that presents curvilinear varying law. Furthermore, an adaptive filter designed with the extracted instantaneous frequency has high calculation efficiency which solves the problem that the classical filter needs to select filter’s parameters. Finally, the result proves that the proposed method can extract the modulation component and decomposing mechanical varying non-stationary signal.
(2) Considering the instantaneous rotating frequency under large speed fluctuation condition shows fast varying nonlinear property, in order to use MSCSR to better estimate it, we propose two solutions which utilizes transformation idea and alternative idea respectively. As for the former, we can divide the globally nonlinear instantaneous frequency into several locally linear instantaneous frequencies, and then use MSCSR to achieve accurate estimation. As for the latter, we can replace the linear frequency factor
Footnotes
Handling Editor: Chenhui Liang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study is supported by the Lin-gang’s integration between industry and education public service project of Shanghai Dianji University (22B0203) and The Ministry of Education’s Cooperative Education Project (BINTECH-KJZX-20220831-51).