
Abstract
The latest international survey shows that slow computational speed is still a significant issue for air brake models. Fluid dynamics air brake models can be more accurate but are slower in computing speed. Empirical models are reported as effective and more efficient. This article developed a new experimental based empirical air brake model that is more comprehensive and can be used to simulate both pneumatically and electronically controlled air brake systems, as well as locomotive air brake systems and brake systems for radio-based distributed power trains. Multiple functions were used to simulate various characteristics of brake cylinder pressures, which enables the model to capture more details. An activating algorithm was developed to further improve the computational efficiency. Case studies were conducted to compare the simulation results with experimental data. Simulation results and experimental data had good agreements regarding brake delays, force patterns and cylinder pressure amplitudes. The empirical air brake model is about 70 times faster than a fluid dynamics model and 7.4 times faster than real-time.
Introduction
Railway air brakes are safety-critical systems for long heavy haul train operation. Though modelling of air brake systems has seen significant advancement in recent decades, 1 it remains as one of the most challenging steps for simulations of longitudinal train dynamics. A comprehensive international survey about air brake modelling was recently published in Wu et al. 1 According to this survey, air brake models can be roughly put into three groups. The first group was called fluid dynamics models; examples of such models can be found in Refs.2–5 Fluid dynamics of brake pipes were considered and modelled by using partial differential equations that describe various governing laws: conservation of mass, momentum balance and energy balance. Flows and dynamics of the brake valves were then mainly described by modelling the air flows among various chambers, volumes and cylinders. Some lumped-parameter models5,6 can also be regarded as fluid dynamic models. The second group of air brake models were called empirical models. Example of such models can be found in Refs.7–12 Understandably, they did not explicitly model fluid dynamics behaviour of brake pipes and brake valves. Brake behaviour was simulated by fitting the time variations of pressure distributions among the studied brake cylinders. Various brake system characteristics were considered including maximum brake pressures, pressure changing rates and time delays. The third group of models were called fluid-empirical models. Such models can be found in Refs.13–18 These models combined the features of the fluid dynamics models and empirical models by modelling brake pipes via fluid dynamics principles while modelling brake valves via the empirical way. Note that the difference between empirical air brake models (whole system models) and empirical brake valve model is that the inputs for the former are direct train driving commands from drivers, whereas the inputs for the latter are brake pipe pressures.
Computational speed is a major issue for simulations relative studies of long heavy haul trains due to the complicity of modelling and large number of vehicles. 19 The international survey 1 has also pointed out the computational speed issue of air brake modelling as one of the ongoing research topics. The fluid dynamic methodology for air brake system modelling requires solving partial differential equations, which is more complex than other parts of longitudinal train dynamics, such as modelling of tractive and dynamic brake forces, modelling of resistance forces. Therefore, fluid dynamic air brake models can be a primary contributor for the slow computational speed issue. Note that the significance of computational speed also depends on the scale of the problem analysed. For simulations where only small number of vehicles and/or short simulated time is required, the computational speed becomes relatively insignificant, as the total simulation time should be acceptable anyway. Whereas for simulations that do require simulations of many vehicles and long simulated time, such as whole-trip simulations and optimisation studies,20–22 computational speed becomes significant. Fast air brake models are also chased by researchers who focus on train driving controls.23,24 Empirical models have been reported as computationally efficient as well as effective.6–12 For longitudinal train dynamics simulations, results required from air brake system models are brake forces, therefore brake pipe models are not required, which also makes empirical models justified. In addition, modern intelligent transport systems often require fast models to predict system performance and to adjust train control actions. Fast empirical air brake models can play some roles in these systems as well.
This paper presents a new empirical air brake model that is developed from experimental data. Compared to other empirical air brake models, the new one has integrated a signal source searching algorithm to enable the simulations of radio-based DP trains. Multiple functions are used to simulate the time history of brake cylinder pressures, which enables the model to simulate more details. The new model can simulate multiple types of air brake systems including Pneumatically Controlled Pneumatic (PCP) brake system or Pneumatically Controlled Air brake system, Electronically Controlled Pneumatic (ECP) brake systems and locomotive air brake systems.
Air brake systems and experimental data
In this section, the working mechanism of PCP brake systems will be briefly discussed; and then experimental data about PCP brake systems, ECP brake systems, radio-based Distributed Power (DP) control and locomotive air brake systems will be presented.
Air brake systems
Railway trains have used various types of air brake systems at different development stages. These include direct air brake systems 25 that are not used in modern railway operation anymore; vacuum brake systems 26 that were mainly seen on Indian railways; and the most widely used automatic air brake systems. 1 Automatic air brake systems are the most widely used systems and they have become a norm for long heavy haul trains. Brake related issues, such as brake delays, have been a major limitation for the development of long heavy haul trains. In recent decades, two technologies have significantly reduced the limitation and have promoted the development of heavy haul trains; they are cable-based ECP and radio-based DP control (e.g. the Locotrol technology). 27 Note that in this article, ECP refers to cable based ECP, and PCP refers to the automatic PCP systems.
As shown in Figure 1, a railway train air brake system usually includes sub-systems for locomotives and waggons. Driver’s control valve is commonly located on the first locomotive. It is noted that the locomotive brake system in Figure 1 is heavily simplified; more information of actual locomotive brake systems can be found in Specchia et al. 4 Once a brake command is applied from the driver’s brake valve, the system starts to discharge air from the brake pipe to atmosphere so as to reduce air pressures of the brake pipe. The pressure reduction transmits from the lead locomotive to the tail of the train along the brake pipe. This pressure reduction causes a lower pressure compared with waggon auxiliary reservoirs. If the pressure difference between bake pipe and auxiliary is significant enough, or the pressure reduction rate in the brake pipe is significant enough, the waggon brake valve will apply brake by connecting waggon auxiliary reservoir and brake cylinders. On the contrary, once a release command is applied from the driver’s valve, brake pipe will stop discharging air to atmosphere and pressurised air will be charged from the main reservoir to brake pipe so as to bring the brake pipe pressure back to its rated level. Similarly, this pressure increase will also transmit from the lead locomotive to the tail of the train. Once the pressure difference between the brake pipe and waggon auxiliary reservoir is small enough, waggon brake valve will switch the connection of brake cylinder from auxiliary reservoir to atmosphere to release brake cylinder. Above is a brief description of the brake and release processes of air brake systems, more details about different features of different air brake systems can be found in Wu et al. 1

PCP brake system.
Brake delay is an important issue for modelling of air brake system. The pattern of brake delay for head-end trains is straightforward: waggons brake one by one from the head to the tail of the train. For trains with radio-based DP control, the brake delay is shown as Figure 2. Assume that there are three locomotives in the DP train; and Loco 1 is the master locomotive as shown in Figure 2(a). The master locomotive sends out brake signals to slave locomotives, that is, Loco 2 and Loco 3. Radio signals usually take seconds to be received and processed by slave locomotives. Figure 3 illustrates some test results about the delays for slave locomotives to response to the control signals of the master locomotive. 27 From the test results, it can be seen that there is about 50% of possibility that slave locomotives will take about 3 s to response. Therefore, before slave locomotives response to the brake signals, waggons that close to the master locomotive have started braking, as shown in Figure 2(b). To be able to model the air brake system, it is assumed that locomotives are the sources of brake signals; and for each waggon, there is only one signal source, that is, the one whose signal reaches the waggon first. In Figure 2, waggons numbered as ‘0’ are not braking; and those numbered as ‘1’, ‘2’ or ‘3’ are. Meanwhile, the numbers can be regarded as the signal sources of waggons. Combining the implications of radio signal propagation and that of brake wave propagation, a status shown as Figure 2(c) will be reached.

Brake delay in trains with radio-based DP control: (a) start of the process, (b) signals reach remote locomotives and (c) brake pressure changes propagation.

Radio-based DP control performance.
ECP systems use on-board cables to transmit brake signals as shown in Figure 4. Since air pressure signals and radio signals are replaced by electronic signals, there is almost no brake delay for waggons in the trains; brake applications throughout the train are applied at almost the same time.

Train with the ECP system.
Experimental data
Brief information of the experimental data used in this paper is listed in Table 1. All data about the type 120 brake valve were provided by Southwest Jiaotong University, China, they were measured on an indoor test rig that had the capability of simulating 150 brake valves at a time. The left column of Figure 5 is a representation of the dataset 1 in Table 1. The experimental data is plotted side-by-side with simulated results from Section 4. In this figure, the numbers in the legends indicate the position of the waggon brake valve in the train. It is noted that in Figure 5(c), (e) and (g), the brake release data is not available. This is also mainly due to the fact that brake cases of 140 kPa, 170 kPa, and the emergency are mainly used to stop the train and when the train is stopped, the brake release performance is less significant than that in the 50 kPa case which is usually used to correct train speeds during normal operation.
Descriptions of experimental data.

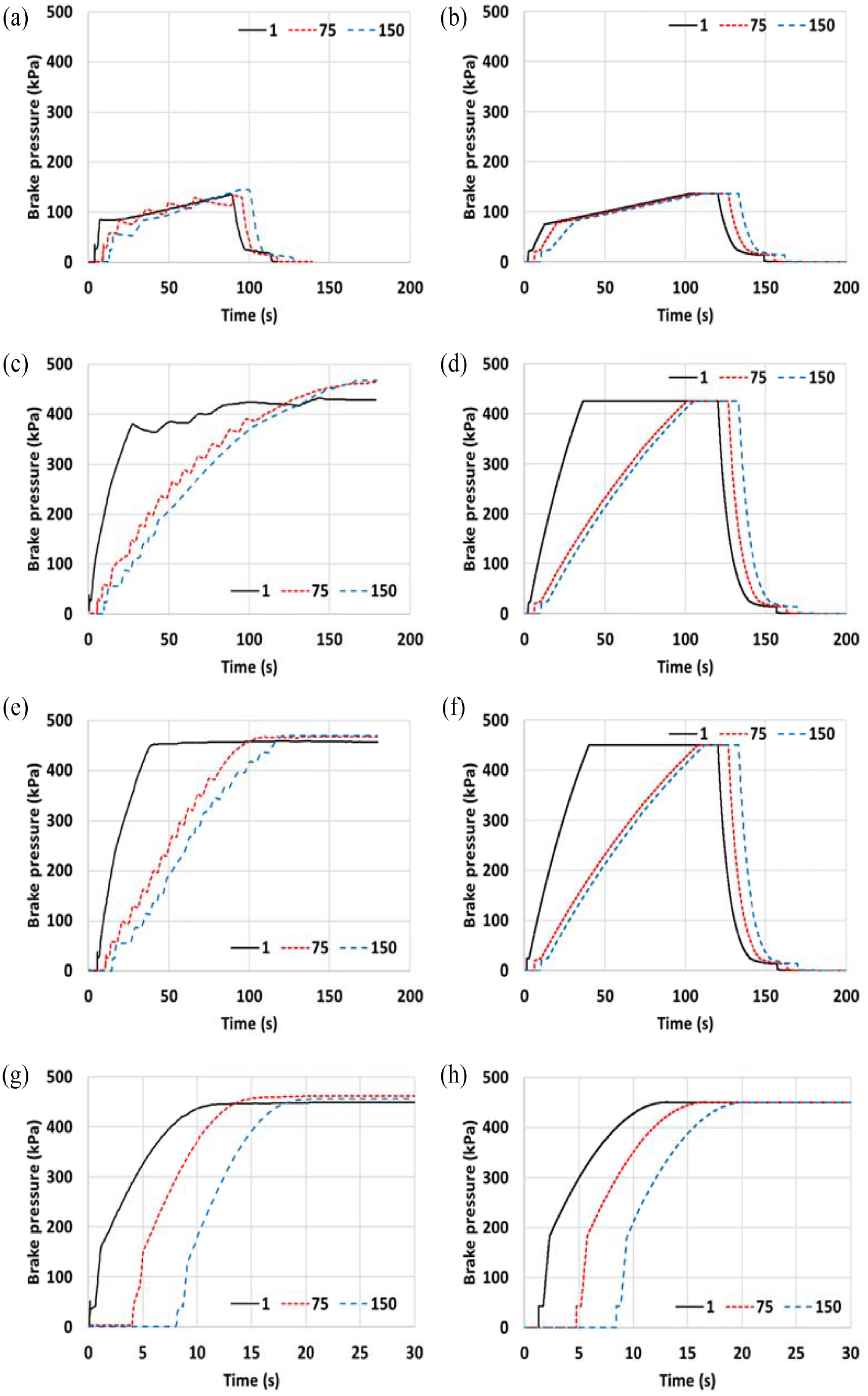
Brake cylinder pressure results of a PCP system (the pressure in sub-captions indicate final pressure reduction of the brake pipe): (a) measured results, 50 kPa, (b) simulated results, 50 kPa, (c) measured results, 140 kPa, (d) simulated results, 140 kPa, (e) measured results, 170 kPa, (f) simulated results, 170 kPa, (g) measured results, emergency and (h) simulated results, emergency.
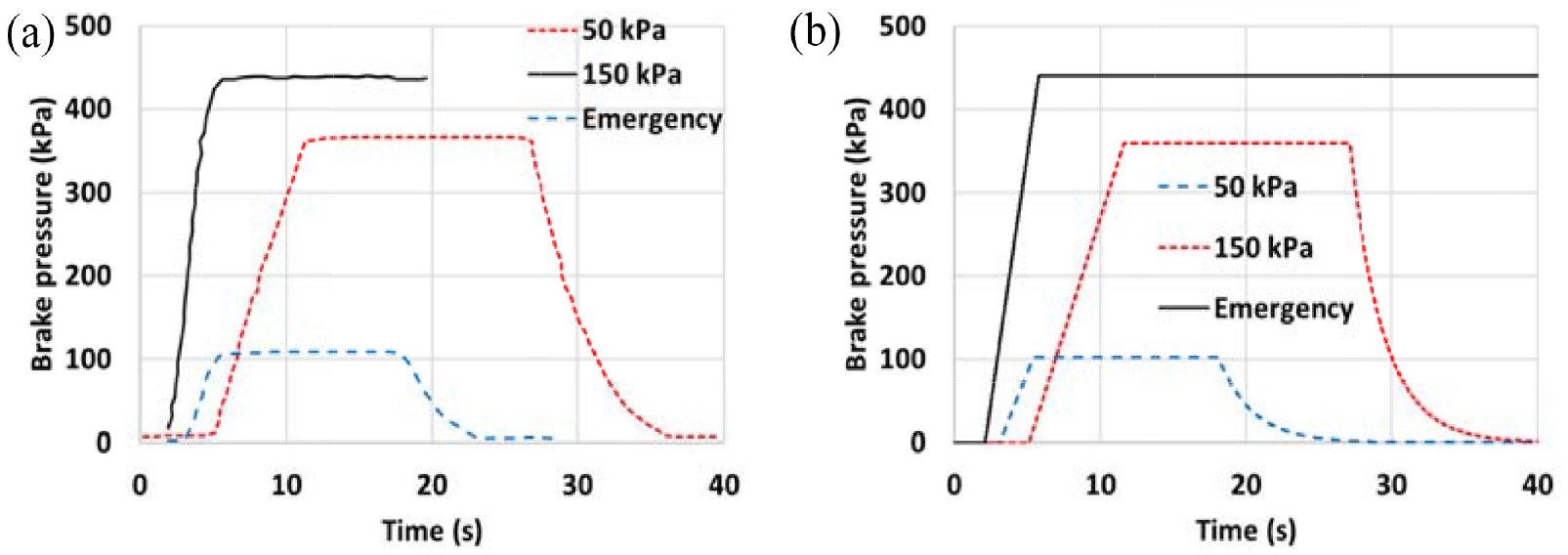
Two sets of experimental data (dataset 5 and dataset 6 in Table 1) about ECP systems 28 were used. The measured results in Figure 6(a) are representations of the dataset 5. Note that since the brake cylinder pressures at different positions overlap each other in the time domain, only one curve was plotted in Figure 6.

Results of an ECP system: (a) measured results and (b) simulated results.
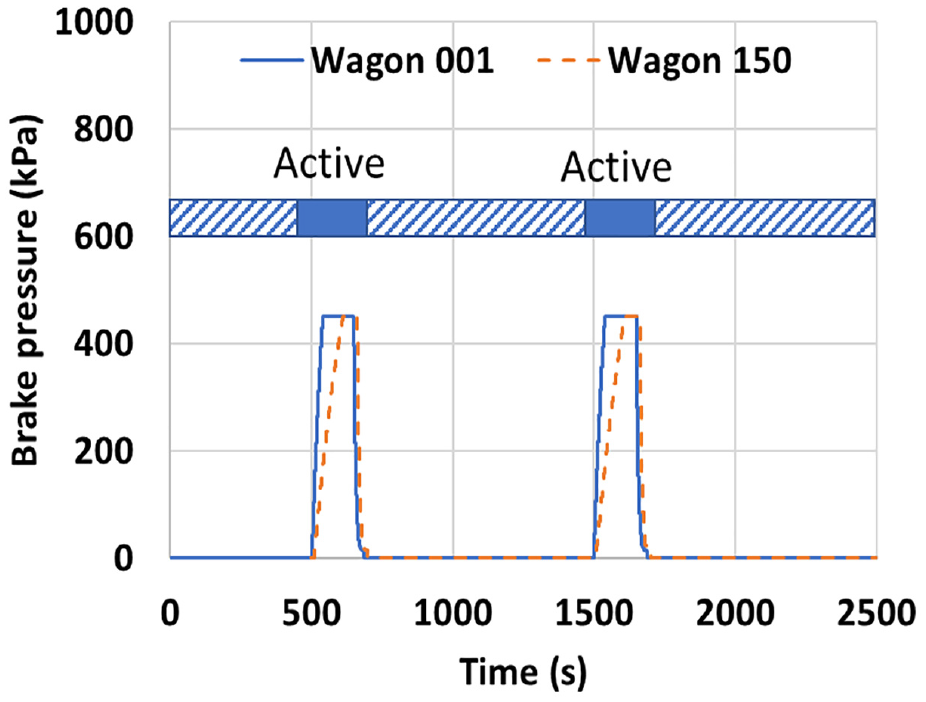
Two sets of experimental data (datasets 7 and 8) about locomotive air brake systems were provided by Southwest Jiaotong University, China. Datasets 7 and 8 were measured on a test bench for air brake systems used on Chinese HXD electric locomotives. Figure 7(a) is a representation of dataset 7. In the figure legends, 50 and 150 kPa indicate brake commands with 50 and 150 kPa (brake pipe) pressure reductions respectively.
Results of locomotive air brake system: (a) measured results and (b) simulated results.
Modelling of air brake
Modelling will first focus on PCP systems, and then models of ECP systems and locomotive air brake systems can be easily derived from that of PCP systems. To develop an empirical air brake model, the first step is to characterise the dynamic behaviour of the air brake system and to determine their quantifying parameters. Then, a mathematic function has to be selected to fit quantifying parameters. During this process, fitting tools such as the Matlab can be used.
Brake pressures in steady states
Brake cylinder pressures after an air brake system reaches a steady state (e.g. pressure after the 20th second in Figure 5(g)) is considered as a nonlinear function of the inputs, that is, the brake commands indicate the final pressure reductions in the brake pipe,

where

where
Brake delay
Time delays of brake and release of air brakes are influenced by the propagation speeds of pressure waves in brake pipes as well as by the formations of different trains, that is, positions of the locomotives and number of waggons. In this paper, pressure wave propagation speed is modelled as a nonlinear function of the brake inputs as:

where

where
Brake cylinder charging
As can be seen from the measured data in Figure 5, the charging processes for brake cylinders are of nonlinearity in the time domain. And the charging processes for cylinders at different positions are different from each other. A summary of various braking scenarios can lead to that the overall pattern of the charging processes is of an approximate exponential pattern; therefore, an equation expressed as equation (5) was proposed to approximate the processes.

where

As can be seen from Figure 5 that the nonlinearities of the charging processes include other characteristics, for example, the surging of pressure at the very beginning of the brake application; rapid linear increase in the emergency brake scenario (e.g. 2nd–3rd second of the waggon 001, Figure 5(g)) and the slow increase in the minimum brake scenarios (20th–80th second of the waggon 001, Figure 5(a)). All these characteristics can be simulated by using extra correction functions, as shown in Figure 8, to confine brake pressures within certain ranges.

Correction functions.
Modelling of brake cylinder release
Release models are similar to that for brake cylinder charging, which are expressed by exponential function (equation (7)) and correction functions.

where

where
Modelling of ECP and locomotive air brake
Modelling of ECP is based on the PCP model described in Sections 3.1–3.4. To derive an ECP model, differences between PCP and ECP systems have to be acknowledged. First, ECP uses on-board cable instead of air brake waves to transmit control signals. Therefore, the signal speed for ECP is significantly faster than that of PCP systems. For ECP models, equation (3) can be replaced by a relatively big constant value (e.g. 3000.0); and
For locomotive air brake models, delays of radio signals have to be considered; this can be done by using the algorithm expressed by equation (4). Locomotive air brake systems are usually direct brake systems, by examining the experimental data shown as Figure 7(a) it can be found that the charging process can be approximated as linear. While the slopes for charging processes are related to brake signals. Another nonlinear function,

where
Key parameters for look-up table functions.

A comparison of the measured and simulated pressure ascending time of the results presented in Figures 5 to 7 is summarised in Table 3. It is noted that in the modelling method presented in this paper, maximum steady brake cylinder pressures and brake delays directly uses the parameters summarised from the measured results, therefore there is no differences in these two parameters. Under this simulation, the ascending time is compared as recommended in Wu et al. 1 In this table the difference is calculated as (Simulated-Measured)/Measured and is presented in percentages. For the PCP case, only results of the waggon 150 are presented as simulation experience indicates that waggon 150 usually shows the largest differences between the simulation and measured results. The results show that stimulation results were well matched with experimental data; the maximum difference between the measured and simulated results was less than 10%.
A comparison of the pressure ascending time.

Further improvement of computational speed
Simulation experience indicates that for whole-trip simulations brake applications take account of a very small portion of the total simulated time. For example, for a whole-trip simulation that lasts for 3 h (simulated time), brake applications could only take 20 min (simulated time). For conventional longitudinal train dynamics simulations, air brake forces are computed for every time-step. It is understandable that there is no brake force if brake applications are not applied or the brake release command has been issued for a while, for example, 120 s after the brake release command. In other words, for a large portion of simulated time, brake forces do not have to be computed. Combing the fact that air brake models (especially fluid dynamic models) are relatively computationally expensive, significant amount of computing time can be saved from the conventional scheme of air brake models.
In this article, an algorithm shown as Figure 9 and expressed as equation (10) was developed to activate computing of air brake forces when it is necessary.

Activation of air brake model.
where
Case studies
Simulations were carried out against experimental data for PCP systems, ECP systems and locomotive brake systems. Corresponding simulated results have been plotted in Figures 5, 7 and 8. Note that simulation conditions for these results were the same with corresponding experimental conditions. Simulation results show that the empirical air brake model developed in this paper is well matched with experimental data regarding various system behaviour, for example, brake delays, pressure amplitudes and force patterns.
To examine the patterns of brake delays for DP trains, a long heavy haul train model was developed to use two locomotives at the front and then 105 waggons, and then two locomotives in the middle and then 105 waggons at the end. Emergency brakes for DP trains with and without EOT devices were simulated. Delays of radio signals for all slave locomotives and EOT devices were 3.5 s; the corresponding simulated results are shown as Figure 10. As can be seen form Figure 10, the simulated patterns of brake delays agree with the discussions in Section 2.1.

Simulated results of radio-based DP trains: (a) with EOT devices and (b) without EOT devices.
To demonstrate the advantage of the empirical model in terms of computational speed, the same simulations presented in Figure 10 were repeated using the fluid dynamics model developed in Wu et al. 29 The computing time of the simulations is compared in Table 4. The results show that the detailed fluid dynamics model was about 9.5 times slower than real-time. To simulate a 25-s brake operation, the fluid dynamics model required about 240 s. However, the empirical air brake model was significantly faster. The same simulations only took the empirical model 3.4 s, which was about 7.4 times faster than real-time. comparatively, the empirical model was about 70 times faster than the fluid dynamics model.
Summary of computing time.

Discussion and conclusion
The latest survey 1 shows that slow computational speed is still a significant issue for air brake models. Fluid dynamic models can be more accurate to simulate air brake systems; empirical models have their own advantages, specifically, sufficiently accurate, effective and more computationally efficient. For large scale long heavy haul train simulations, empirical models can be a good choice. The limitation for empirical models is that a final model can be limited to the formation of the train and the specific type of the brake system from which the experimental data were obtained from. For the empirical model to be used for a different train formation and a different type of air brake system, model equations proposed in this paper can be used but the specific model parameters may need to be adjusted. For the development of a comprehensive model, all commonly seen brake and release cases are recommended to be considered during the model development process.
Compared to other empirical models, the model developed in this article is more comprehensive, which can be used to simulate PCP, ECP and locomotive air brake systems. It can also be used to simulate radio-based DP trains. A special algorithm to further improve the computational efficiency of the new model was developed. Numerical experiments indicate that about 20% of improvement for computational efficiency can be achieved for whole-trip simulations. Experimental data about PCP brake systems, ECP brake systems, radio-based DP control and locomotive air brake system were presented. Simulation results were well matched with experimental data regarding time delays, pressure patterns and cylinder pressure amplitudes. Computational speed of the empirical air brake model was compared with a fluid dynamics air brake model. The results show that the empirical air brake model is about 70 times faster than the fluid dynamics model and 7.4 times faster than real-time.
Footnotes
Handling Editor: Chenhui Liang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.