
Abstract
Aiming at the damage of fruit picking robot during the picking process, an impedance control method of picking robot with parameter self-tuning is proposed. The rheological properties of fruit during picking by manipulator were studied by Burger’s viscoelasticity theory, and the variation characteristics of fruit deformation during picking, as well as the changing law between fruit contact force and deformation were obtained. On this basis, the impedance control system model of the picking manipulator is established, and the impedance controller is designed. Finally, by constructing the self-correcting change function of impedance parameters, the influence of different impedance parameters on the change of the contact force is studied, and then the control system is improved and designed. The simulation and experimental results show that the established impedance control system model can effectively realize the non-destructive grasping of fruit, and has high grasping accuracy. The expected grasping force is smoother, the overshoot of the contact force is greatly reduced, and the adjustment time is also shortened, which indicates that the control method proposed in this paper has certain application value in the control of picking robots.
Introduction
The fruit picking robot is an important symbol of agricultural automation,1–3 and the stable clamping of fruits can be achieved through the control of grasping force output by the end-effector. However, due to the complexity of the working environment, the fruit is easily damaged due to the excessive loading force in the process of robot picking. At the same time, due to the low grasping accuracy, it is also easy to make the fruit picking unstable and fall off. It is of great significance for the improvement of agricultural automation to realize the flexible picking of picking robot control system to reduce the damage of fruit surface.
Researchers have carried out a lot of research on the control system of picking robot.
Chu et al. 4 identified the parameters of the unknown constraint environment model based on the tactile sensing array, and used ADAMS and MATLAB to co-simulate the underactuated gripper given several sets of different target impedance model parameters, which verified the feasibility of environmental parameter identification and adaptive impedance control. Cui et al. 5 used the recursive least square (RLS) method to identify the constraint environment parameters through the tactile sensor array, and then obtained the impedance control model required by the manipulator and the constraint environment by defining the cost function including the contact force, velocity and displacement errors, and found the critical target impedance parameters that minimize the impedance model through a large number of experiments, which can ensure the stable grasp of various unknown objects. Chen et al. 6 used logistic regression model to analyze the probability of thumb index finger stable grip. On this basis, they established a two-finger force grasping dynamic model of picking robot, which was effectively verified by experiments. Zhang et al. 7 established the plastic deformation model of manipulator in the picking process based on viscoelastic theory, compared and studied the influence of two finger picking robot on fruit plastic deformation, and determined the optimal grasping force control strategy. Luo and Tan 8 proposed a fruit stalk branch locking and separation method according to the apple picking requirements. Based on the underdrive principle, the corresponding picking mechanism, fruit stalk locking mechanism, and separation mechanism were designed. After locking the position of the fruit stalk, the fruit was separated up and down by double plates to complete the fruit picking. Hao et al. 9 designed a four fingered soft bionic manipulator, proposed the idea of changing the effective length of the bionic finger to change the size of the grasping force, and obtained the conclusion that under the optimal length, the fixture can produce the maximum tension of the corresponding object size. Gao et al. 10 applied 3D printing technology to design a flexible grasping manipulator with adaptive grasping function. The feasibility of structural design was proved through the functional and safety experiments on the built experimental platform. Xi et al. 11 synthesized the advantages and disadvantages of the existing flexible manipulator, and designed a bionic fingerless flexible grasping manipulator based on the deformation characteristics of the chameleon tongue during predation, which uses the linear motor push rod to guide the buckling deformation of the elastic silicone membrane to grasp the target. Sun et al. 12 proposed a design idea of using a simple crank slider mechanism to complete the manipulator’s grasping of various fruits for a passive fruit grasping end actuator. By grasping fingers that approximate the outline of apples and adding a flexible buffer device with accurate grasping force control, it can meet the grasping of a variety of fruits, and can well realize the sorting and picking operations of a variety of fruits.
At present, some researches have studied the changing law of the contact force of the picking manipulator, but most of the existing literatures assume that the fruit is an elastic body, ignoring the anisotropy and viscoelastic characteristics of the fruit, and have not studied the dynamic change law of contact force during the process of the end effector gripping the fruit at different gripping speeds, as well as the impact of continuous gripping force energy input and fruit viscoelastic constraint deformation on the gripping environment. The novelty of this study is that the process of uniform fruit grasping can be subdivided into three stages: uniform loading, clamping deceleration, and stress relaxation. Combined with the dynamic characteristics of each stage and the Burgers model of apples, a composite model of fruit grasping has been established, and the changing laws of contact force, fruit deformation, and the equivalent stiffness of the grasping environment during the grasping process have been obtained by using MATLAB. And combined with the grasping process and the grasping environment, the flexible grasping controller is designed to further study the non-destructive apple picking technology.
Viscoelastic Burgers model of manipulator grasping fruit
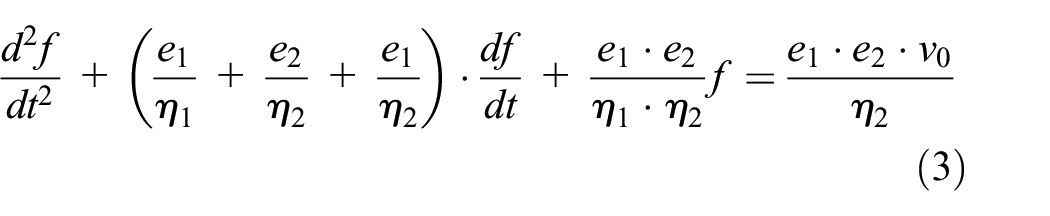
The fruit will be deformed due to the force during the picking process. In this study, the viscoelastic model was used to describe the dynamic characteristics of the fruit during the picking process. 13 In view of this, the classic four-component Burgers model was used in this study to characterize the dynamic characteristics of fruit grabbing process, and the basic rheological differential equation 14 is:

Where, f represents the contact force; x represents the deformation of fruit; t represents the time; e1 represents the instantaneous elastic coefficient; e2 represents the delayed elastic coefficient; η1 represents the viscosity coefficient of the viscous element in series, η2 represents the viscosity coefficient of the viscous element in parallel.
In this study, fruit samples were divided into 10 groups with 2 in each group for uniaxial compression creep test. For each group of fruit deformation data, 30 sample data were selected. 14 The first 4 data intervals were set as 5 s, the next 4 data intervals were set as 20 s, then 18 data were read at an interval of 50 s, and the last 4 data intervals were 250 s. According to Burgers model, the mathematical expression of fruit creep can be obtained as follows 15 :

The data after all creep tests were averaged, and the curve fitting was performed on the data using formula (2), as shown in Figure 1. It can be seen that the fitted curve is basically consistent with the creep curve, indicating that the selected model has a certain rationality. On this basis, the relevant parameters of viscoelasticity can be obtained, that is, e1 is 24.43 N/mm, e2 is 50.88 N/mm, η1 is 1.27e6 (N s)/mm, and η2 is 2.03e4 (N s)/mm.
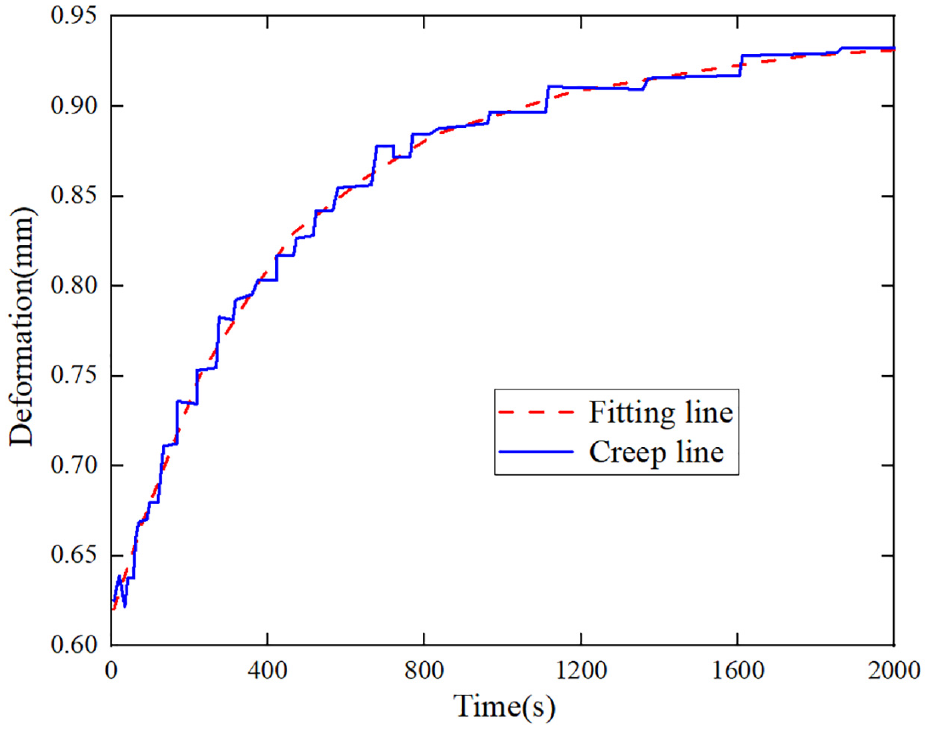
Curve fitting of creep data.
Grabbing dynamics model of picking manipulator
Dynamic model of fruit grasping
In order to increase the contact area between the picking manipulator and the fruit and make the contact force uniform, the end effector of the manipulator in this study was designed to be an arc shape. The finger action of the end effector is driven by DC motor. After touching the fruit, the finger continues to close the fruit to deform until reaching the maximum output force F0, then decelerate and stop closing. Divide the process of picking fruit by robotic hand into three stages: constant loading, clamping deceleration, and stress relaxation.
In the stage of uniform loading, it is considered that the deformation amount x1 of the fruit has a linear relationship with time, and the deformation condition is
According to the above deformation conditions, during the uniform loading stage, the functional relationship of the fruit surface deformation x1 with time is: x1 = kt.
In the stage of clamping deceleration, the grasping force generated by the end-effector will reach the maximum value F0, while the contact force of the fruit will continue to increase due to the effect of inertia. At this point, the finger will decelerate to stop, and its kinematics equation is
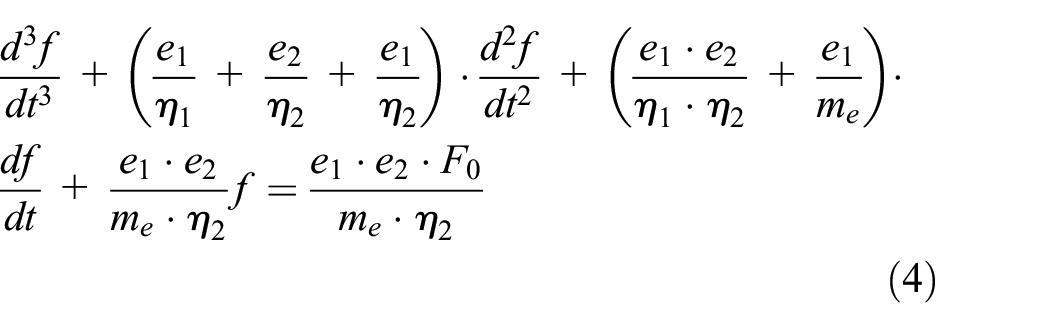
The initial conditions for this stage are f(t0) = F0,

Where T = t − t0, and t0 represents the initial time. C1 and C2 are obtained according to the initial conditions:

It can be seen that C1 and C2 are constants proportional to v0. Combine

Integrate equation (7), when t = t0, there are

In the stage of stress relaxation, the fruit deformation will remain unchanged, according to the grasping process of the manipulator, it can be known that the deformation condition at this stage is

According to the above deformation conditions, during the stress relaxation stage, the functional relationship of the fruit surface deformation x3 with time is: x3 = 0.
Analysis of the relationship between fruit grasping deformation and contact force
According to the dynamic model of the grasping process of the picking manipulator, the initial grasping speeds v0 were selected as 0.1, 0.5, 1, 5, 10, and 15 mm/s to analyze the mechanical characteristics of fruit grasping. 17 The variation of fruit deformation with time is obtained by solving the above fruit deformation equation with MATLAB, as shown in Figure 2.
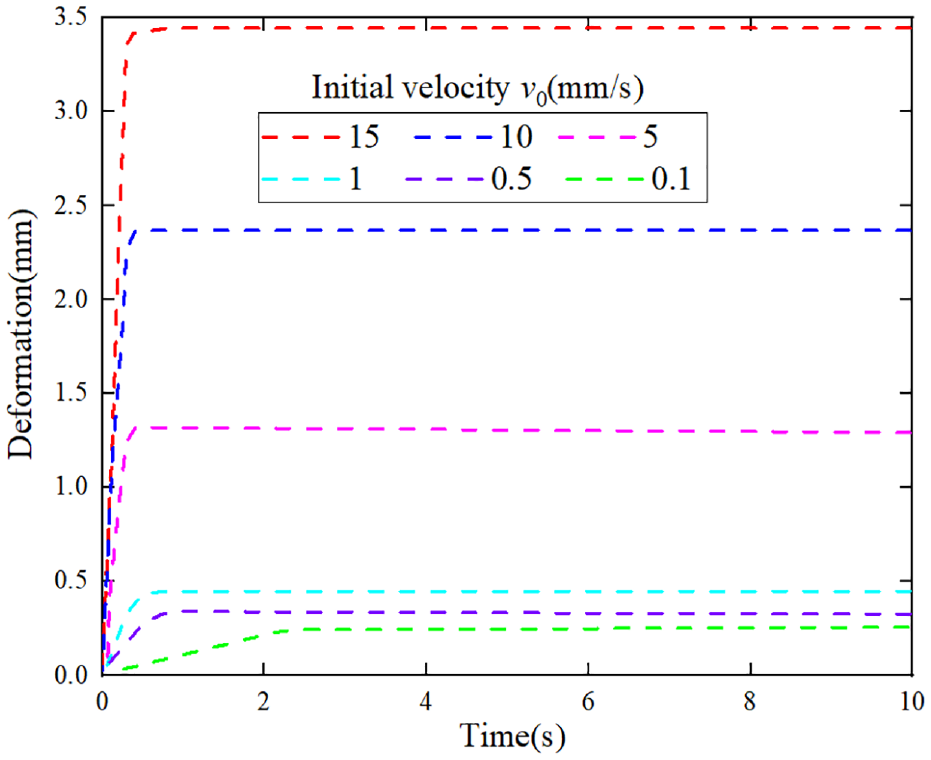
Deformation curves with time under different initial grasping velocities.
The influence relationship between the contact force and deformation of the picking robot in each stage of grasping is further obtained, as shown in Figure 3. In Figure 3, area (1) represents the uniform loading stage, area (2) represents the clamping deceleration stage, and area (3) represents the stress relaxation stage.

Relationship between contact force and deformation under different initial grasping speeds: (a) vo = 0.1 mm/s, (b) vo = 0.5 mm/s, (c) vo = 1 mm/s, (d) vo = 5 mm/s, (e) vo = 10 mm/s, and (f) vo = 15 mm/s.
It can be seen from Figures 2 and 3 that when the initial grasping speed is small, the fruit deformation is small, no more than 0.5 mm. The contact force is maintained at a low level, about less than 10 N. It can be seen that the numerical interval of the contact force at different stages of the grasping process. With the increase of grasping speed, the contact force also increases sharply. When the grasping speed is 15 mm/s, the contact force is about 71 N. Although the grasping action can be completed in a short time, the maximum deformation of the fruit increased significantly from 1.3 to 3.4 mm.
It can be seen that the contact force is proportional to the deformation in the initial stage. In the clamping deceleration stage, the slope of the relationship between the contact force and the deformation decreases gradually with the increase of the deformation. In the final stage of stress relaxation, due to the self-locking of the actuator driving motor, the fruit deformation will not change and the contact force will slowly decrease.
Compliant control of the end effector of picking robot
Control system model of picking robot
Figure 4 shows the transmission structure model of the picking robot end effector grasping system, uc is the control voltage, V; n is the reduction ratio of the reduction device; θm is the rotation angle of the motor, rad; θl is the load angle, rad. It can be seen that the driving mechanism is composed of a reducer and a DC motor. The relationship between the finger displacement x of the end-effector and the load Angle θL is


End effector model of picking manipulator.
Where,

Where, Kb represents the motor inverse potential constant, Kt represents the torque constant of the motor, R represents the armature resistance of the motor (Ω), Ks represents the power amplification factor, J represents the inertia of the motor (kg m2), D represents the viscous friction coefficient of the motor, n represents the reduction ratio, c represents the lead of the ball screw (mm), and the values of each parameter are shown in Table 1. 18
The value of each parameter.

According to Table 1, there are:

Grasping control strategy of picking robot
The deformation of the fruit in the clamping process of the picking robot can be regarded as the forward displacement of the finger of the end effector. By adjusting the force and position, the fruit picking process will reach a stable state. However, excessive grasping speed will cause plastic deformation of fruit.
According to the fruit deformation nephogram corresponding to different grasping speeds described in the literature, 17 it can be seen that when the grasping speed is 3 mm/s, there is a peak value in the maximum stress curve of the fruit peel, and there is a peak value in the contact force at this time. Since the fruit peel is considered as a linear elastic material, when the grasping speed is greater than 3 mm/s, it can be analyzed according to the finite element simulation that the stress on the fruit pulp exceeds the yield limit, and then the peel will undergo plastic deformation. Therefore, the grab speed in this study is set to 3 mm/s. According to the above analysis, Figure 5 shows the expected position, expected speed, and expected acceleration of the picking manipulator end effector in the grasping process.

Desired position, desired speed and desired acceleration of the end of the picking manipulator.
The force/position control system in the picking process of the manipulator can be equivalent to the “mass-damping-spring” model. 19 For the picking manipulator, the following dynamic equation exists 20 :

Where, xd represents the desired position, md represents the inertia parameter of the impedance controller, bd represents the damping parameter of the impedance controller, kd represents the stiffness parameter of the impedance controller. According to the above dynamic model, Figure 6 shows the structure of force-based impedance control system.
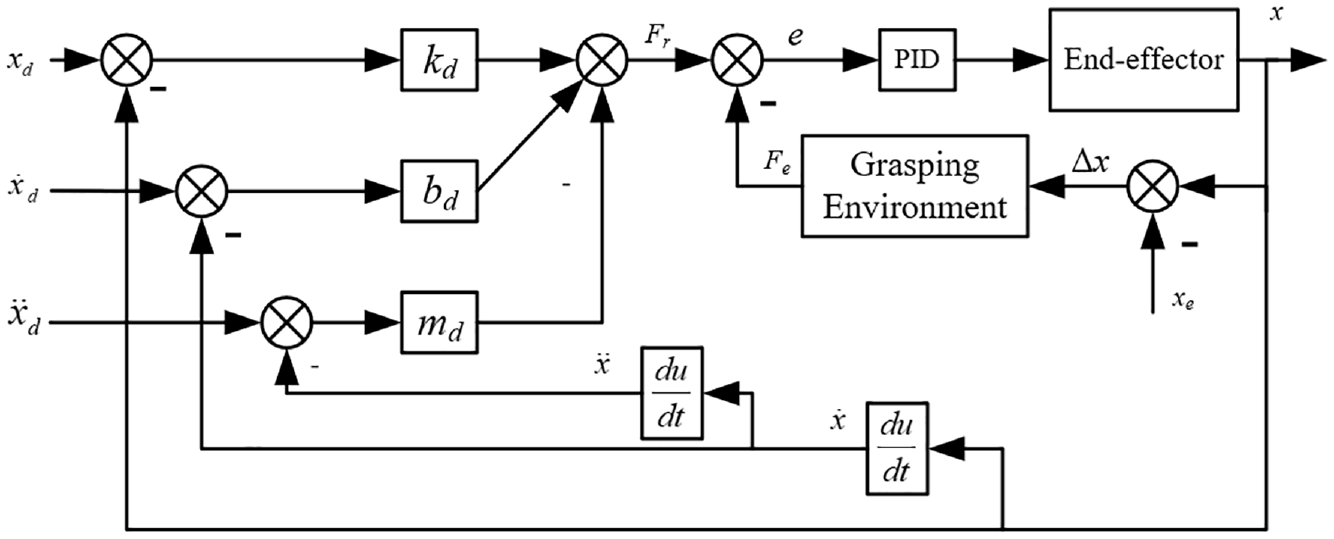
Force-based impedance control system structure.
Let

Where Ke represents the target fruit stiffness, N/mm. After the picking manipulator control system is adjusted by PID control, the actual position is output. In order to prevent the influence of fruit parameter uncertainty on the picking process of manipulator, based on the above dynamic model, this study studies the change law between contact force and fruit deformation through MATLAB software, and sets the grasping speed as 3 mm/s. The results are shown in Figure 7.

Fitting curve of grasping environment contact force model.
The grasping contact force model fe is obtained, and the fitting mathematical model is as follows:
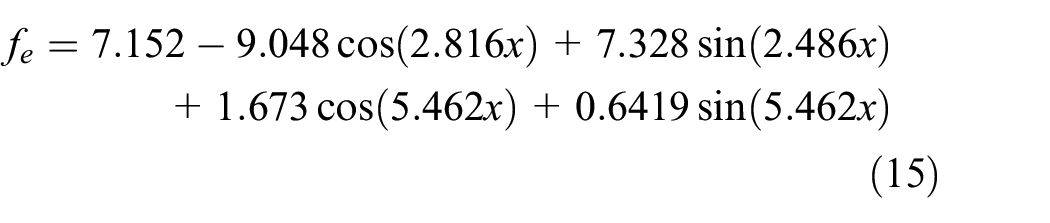
Where, x represents the deformation of the fruit.
Parameter self-tuning of picking manipulator control system
The overshoot, response speed, regulation time, and steady-state error of the picking manipulator control system are important indicators to evaluate the performance of the control system. 22 Based on the above analysis model, the performance of the control system needs to be tested. The impedance parameters of the picking manipulator include inertia parameter md, (N s)/mm2; damping parameter bd, (N s)/mm; stiffness parameter kd, N/mm. The parameters of PID controller include proportional parameter Kp, integral parameter Ki, and differential parameter Kd. The setting values of each control parameter are shown in Table 2. The initial position xe of the finger touching the target fruit is set to 5 mm.
The setting values of each control parameter.

The parameters are substituted into the control system of the picking manipulator, and the non-destructive picking of fruits by the manipulator is realized on the basis of the picking dynamic model of the manipulator. However, the fixed parameters have poor robustness to system disturbance and do not have good adjustment ability to the unknown target information. Through the self-tuning method of impedance parameters, the robust performance of the control system can be improved.
Design of inertia parameter md
In the design process of inertia parameter md, the parameters bd and kd are kept unchanged, and the values of md take 0.005, 0.05 and 0.15 respectively.23–26 According to the above analysis, the contact force output by the picking robot under different inertia parameters can be obtained, as shown in Figure 8. It can be seen from Figure 8 that with the increase of inertia parameter md, the contact force gradually increases, and the overshoot of contact force increases with the increase of inertia parameter. At the same time, when the inertia parameter is large, the output contact force will produce large vibration, while when the inertia parameter is small, it takes a long time for the contact force to reach the maximum value. Therefore, when adjusting the inertia parameters of the impedance controller, it is necessary to take into account the vibration amplitude and overshoot of the contact force. Within the allowable range of the amplitude of the contact force, try to ensure that the response speed of the contact force is fast and the overshoot is small.

Influence of inertia parameter md on contact force.
The nonlinear function of inertia parameters designed in this study is:

Where, t represents the simulation time, the value range of inertia parameters is [am − bm, am]. cm is the adjustment coefficient of inertial parameters. The inertia parameter of the manipulator control system is large at the beginning, with the progress of the manipulator in the fruit picking process, the inertia parameter value will gradually decrease and tend to be stable, so as to minimize the contact force overshoot in the picking process
Design of damping parameter bd
In the design process of inertia parameter bd, the parameters md and kd are kept unchanged, and the values of bd take 0.25, 1.5, and 3.5 respectively. According to the above analysis, the contact force under different damping parameters can be obtained through the control system, as shown in Figure 9. It can be seen from Figure 9 that when the inertia parameters and stiffness parameters remain unchanged, the damping parameter value will significantly affect the change of contact force. With the increase of damping parameter value, the overshoot of the contact force will gradually decrease, and it can be seen that the response speed will also gradually decrease.

Influence of damping parameter bd on contact force.
The nonlinear function of the designed damping parameters is as follows:

The range of damping parameters is [ab, ab + bb], cb represents the adjustment coefficient of the change rate of damping parameters. In order to obtain the good regulation performance of the control system, in the selection of the initial value of damping parameters, first select the value with fast initial response speed to avoid excessive contact force oscillation, and then appropriately increase the damping parameters.
Design of stiffness parameter kd
In the design process of inertia parameter kd, the parameters md and bd are kept unchanged, and the values of kd take 3, 15, and 30 respectively. The influence of stiffness parameters on contact force is shown in Figure 10. It can be seen from that in the picking manipulator control system, the stiffness parameter will directly affect the expected contact force in the picking process.
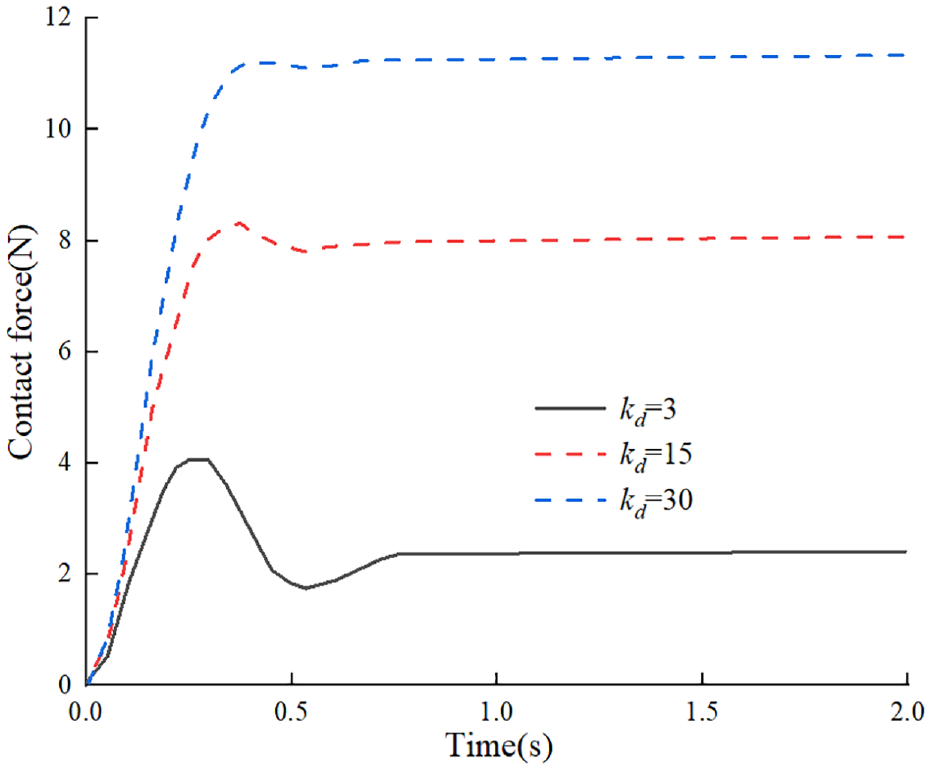
Influence of stiffness parameter kd on contact force.
The nonlinear function of the design stiffness parameters is as follows:

Where, ak, bk, and ck represent the coefficients of nonlinear functions of stiffness parameters.
Simulation and test
In order to verify the effectiveness of the impedance control system of the picking robot, the simulation model of the end effector control system of the picking robot is built in Simulink, as shown in Figure 11.Where, xd represents the desired position of the end-effector, dxd represents the velocity of the end-effector, d2xd represents the acceleration of the end-effector; xe represents initial position of finger contact object; Xd_X represents desired position deviation, dXd_dX represents velocity deviation, d2Xd_d2X represents desired acceleration deviation; x_xe represents the actual position deviation; Fr represents the desired grasping force; Fe represents the contact force; e represents the force error.

Simulation model of force-based impedance control.
Simulation verification of impedance control with fixed parameters
The simulation results of contact force impedance control under the condition of fixed parameters of picking manipulator are shown in Figure 12.
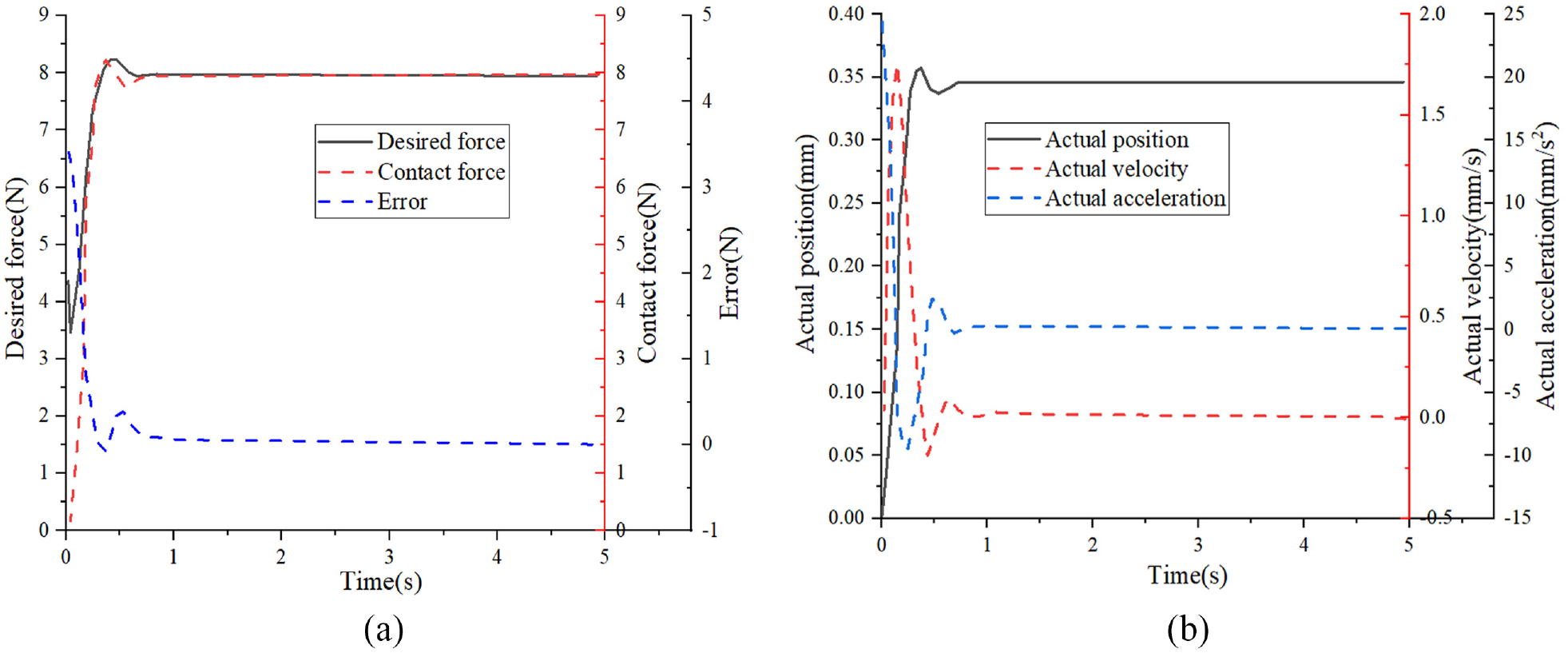
Simulation results of contact force impedance control under fixed parameters: (a) variation law of expected grasping force, contact force, and error of picking manipulator; and (b) variation law of actual position, speed, and acceleration of picking manipulator.
As can be seen from Figure 12(a), according to the expected position, speed, and acceleration of the finger of the end effector, the expected grasping force calculated by the impedance controller fluctuates greatly in the initial stage, and then changes smoothly. The maximum contact force was 8.21 N and then remained stable around 7.96 N. Under the adjustment of the force controller, it can be seen that the time to reach the maximum contact force is slightly small, and the overshoot is about 3.2%. Then the contact force can converge to the expected force, and the force error is almost zero. It can be seen from Figure 12(b) that the change trend of the actual position of the finger is similar to the contact force. The position has a certain change in the initial stage, and then can be stable around 0.35 mm. The dynamic change of the actual position can be seen from the velocity curve and acceleration curve. In the initial process, the actual position of the picking manipulator changes relatively quickly, then decreases gradually, and finally tends to be stable. When the speed of the actual position changes to zero, the actual position reaches the lowest position, and then can quickly converge to the stable position.
Impedance control simulation verification of self-tuning parameters
According to equations (16) to (18), the nonlinear functions are compiled by MATLAB function, encapsulated and imported into the impedance control simulation model shown in Figure 11. According to the influence law of impedance parameter change on contact force, in order to make the control system have fast response and small overshoot, the values of AM and AK should be relatively large and ab should be relatively small in the process of designing impedance parameters. In order to ensure the stability and rapid response of the control system, the setting of each coefficient is shown in Table 3.
The setting of each coefficient.

The simulation results of improved impedance control based on force of picking manipulator control system are shown in Figure 13.
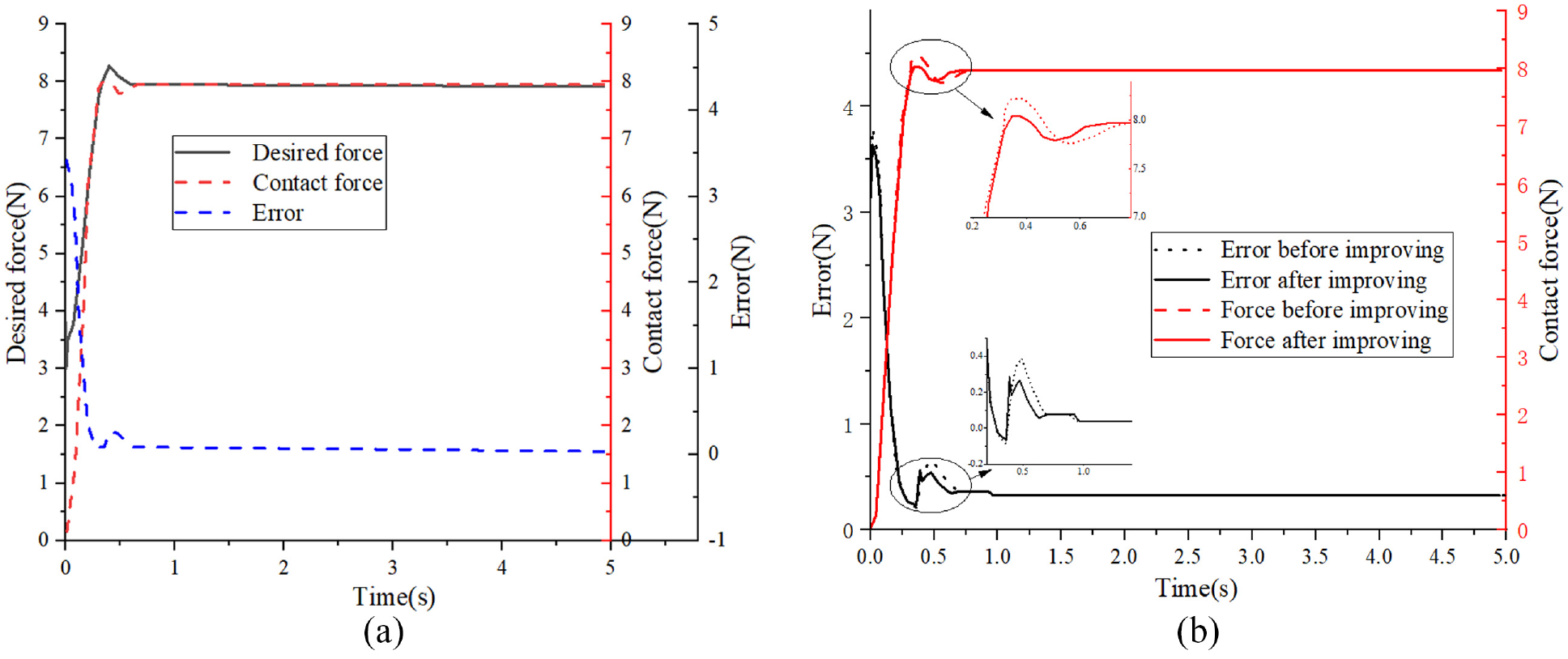
Simulation results of improved impedance control: (a) curve of desired grasping force, contact force, and error with time; and (b) contact force comparison under two impedance control methods.
As can be seen from Figure 13(a), the expected contact force change of the picking manipulator becomes smoother, and the overshoot is also reduced, and it can be seen that the response speed of the improved impedance control system is faster. However, the maximum expected grasping force is about 8.26 N, which is greater than the maximum expected force without improved impedance control, and finally stabilized around 7.95 N. The contact force is basically connected with the near-term expected force, and the error between them is almost zero. Figure 13(b) is a comparison curve of contact force and force error under two impedance control methods.
It can be seen from Figure 13(b) that the contact force curve output by the improved impedance controller of the picking robot is more balanced, that is, there is no jitter in the grasping process, the overshoot is greatly reduced, and the error between the contact force and the expected force is almost zero, indicating that the improved impedance controller has more control performance.
End effector grab test
In order to verify the performance of the picking manipulator control system designed in this study, on the basis of the above analysis, the traditional method and the improved force impedance control algorithm are used for picking experiments, as shown in Figure 14.

Grasping experiment of fruit picking robot.
In the process of grasping, FSR-402 force sensitive resistance sensor is used to detect the contact force feedback signal between the fruit and the finger of the end effector, and the industrial computer completes the data processing and the command of grasping task.
The variation curve of actual contact force with time is shown in Figure 15. The end effector of the picking robot was initially in the ready state, and there was no contact force between the end effector and the fruit. When the end effector just grabs the fruit, the impedance control system starts to give the action command to the end effector. By adjusting the output torque of the motor, the contact force can quickly reach the desired force. When the end effector grabs the fruit stably, the contact force also reaches a stable state, and the industrial computer will send a fruit picking signal. Then the mechanical arm will move the fruit to the specified position according to the instruction, and then drive the motor to separate the end effector from the fruit.
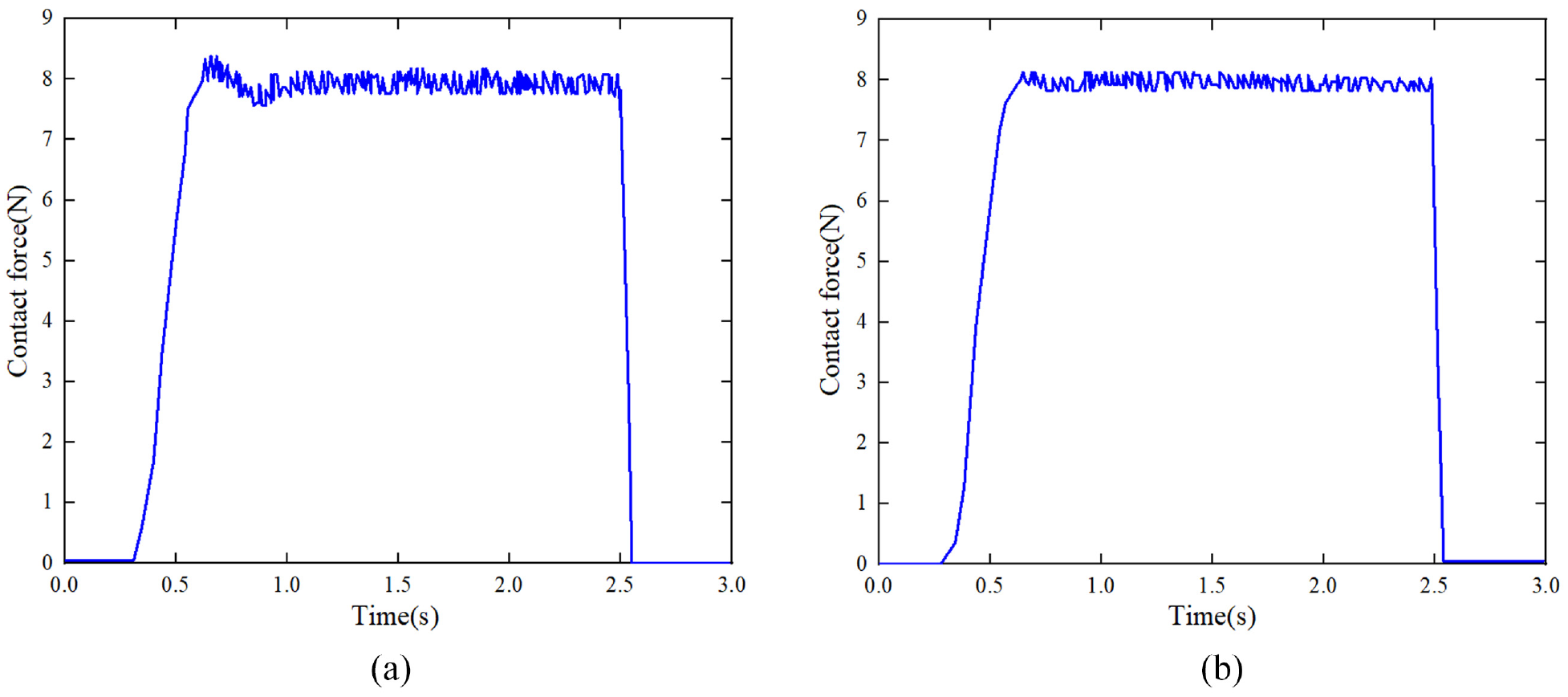
Actual contact force with time-variation: (a) contact force of force-based impedance control and (b) contact force of improved force-based impedance control.
As can be seen from Figure 15, the time when the contact force of the traditional method and the improved method reaches the maximum value is basically the same, and the adjustment time is also roughly the same. However, the contact force overshoot of the traditional method is higher than that of the improved impedance controller, and the contact force fluctuation range of the improved impedance controller is much smaller, indicating that the change of contact force is more stable and more suitable for the fruit picking process of the picking robot.
In order to further analyze the stability of the improved impedance controller, the contact force between the improved impedance controller and the traditional control method is compared and analyzed. The contact force comparison results obtained from 10 grasping tests conducted by different control methods are shown in Table 4.
Contact force data under two control methods.

It can be seen from the data shown in Table 4 that under the influence of the uncertainty of target fruit parameters, the measured data under the stable state shows that the deviation between the contact force of the improved impedance control and the expected grasping force obtained in the simulation is significantly smaller than that of the traditional impedance control method. This further shows that the improved impedance control method is obviously superior to the unimproved impedance control in terms of contact force overshoot and grasping stability, and has better control performance.
Conclusion
(1) Based on the rheological characteristics of fruit and combined with burgers viscoelastic model, an impedance control method of picking robot with parameter self-tuning is proposed, aiming at the damage of fruit picking robot during the picking process. The variation relationship of contact force and deformation with time were studied.
(2) A parameter self-tuning impedance control method for compliant grasping of fruit picking robot is proposed. The force-based impedance control system of fruit picking robot is designed, and the expected input of the proposed control system and the contact force model of grasping environment are solved. The impedance control system is improved by constructing the function of impedance parameter self-tuning parameter varying with time.
(3) The impedance control effects of fixed parameters and self-tuning parameters are analyzed through simulation. The results show that the contact force adjustment time of the improved impedance control system is shorter and the overshoot is smaller, which verifies the advantages of the proposed method in the control of picking robot.
Footnotes
Handling Editor: Chenhui Liang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by the “Zhejiang University Visit Scholar Project – Research and development of intelligent production line” Digital Twin technology (Grant No. FX2018140); National Natural Science Foundation of China: A study on the design method of rotary transplanting mechanism facing the requirements of transplanting track and posture (Grant No. 51375459).