
Abstract
The air-breathing hypersonic planes are considered to be the future of commercial airlines, which can fly from NYC to London in under an hour. For air-breathing vehicles, 3D trajectory planning will become extremely important due to its significant impact on flight performance. Past research on this issue was not comprehensive enough. Thus, we proposed a hybrid method for generating the optimal trajectories efficiently. No-fly zones are specified for geopolitical restrictions in air-breathing hypersonic vehicle missions. However, previous studies focused on no-fly zone constraints with fixed locations and boundaries. For robust execution, we must take into account no-fly zones’ uncertainties, which arise due to uncertain localization, measurement errors, and no-fly zones’ movement. A chance-constrained approach is presented here to deal with such uncertainties. The key idea of this method is controlling risk when the flight path is close to the uncertain no-fly zones. First, the trajectory planning of air-breathing hypersonic vehicles is modeled as a chance-constrained optimization (CCOPT) problem. With the help of the convexification and linearization techniques, we can approximate the non 3.2.2 CCOPT problem as a convex second-order cone programing under the Gaussian distribution assumption. It can be solved to global optimality by the interior point method. Finally, we give numerical simulation results to prove the effectiveness of this method.
Keywords
Introduction
Trajectory planning for hypersonic vehicles such as an air-breathing hypersonic vehicle (ABHV) has received a great deal of attention in recent years.1–4 An ABHV needs to be able to plan trajectories that take the vehicle from its current location to a goal while avoiding no-fly zones (NFZs). These trajectories should be optimal with respect to a criterion such as time or fuel consumption. This problem has two main challenges: First, the trajectory optimization problem of ABHV is highly complicated and inherently nonconvex. Second, there are a number of sources of uncertainty of no-fly zones, such as uncertain localization, measurement errors, and NFZs’ movement. Such uncertainty must be modeled as a form that can be processed by numerical algorithms to achieve robustness.
Many methods can be used to solve the problem of unpowered hypersonic gliding vehicle (HGV) trajectory planning. Model predictive programing, 5 pseudospectral method,1,4,6 indirect method, 7 and convex optimization 8 all demonstrate their unique advantages in certain scenarios. Considering the need to generate trajectories quickly in some tasks, we proposed an algorithm based on geometric stitching. 9
As an application of heuristics algorithm, particle swarm optimization 10 and gravitational search algorithm 11 can also give appropriate solutions. Furthermore, with the development of machine learning, deep neural networks have been used in HGV’s trajectory planning.12,13
However, ABHV’s dynamic is much more complex. Its scramjet engine’s performance is highly correlated with the vehicle’s altitude, velocity, angle of attack, and throttle (as shown in equation (8)). As a result, the optimization algorithm is required to solve a multi-variable, highly non-linear and complex coupling problem in a limited time. Those methods developed for the unpowered vehicle are unsuitable and computationally expensive in this situation. Some existing work circumvents this problem using relatively simple propulsion system models.14,15
In this work, we build a hybrid algorithm for ABHV with complex propulsion-pneumatic coupling based on convex optimization, 8 which has shown great application potential in recent years because of its serval superior features: 16 Every local minimum is a global minimum; if the objective function is strictly convex, then the problem has at most one optimal point. Some kinds of convex problems, like the second-order cone programing (SOCP), can be solved efficiently by primal-dual interior-point methods (IPMs) that only have polynomial complexity.
Previous work focuses on the no-fly zone with precisely known locations and boundaries, 8 which is modeled as a cylinder with its center at the specified longitude and latitude and a given radius. However, they do not explicitly take into account uncertainty, which arises for two reasons. First, the location and boundaries are not usually known exactly but are estimated using a statistical model, satellite imagery, or inaccurate intelligence analysis. Second, some NFZs can move even during the flight of ABHV. So in practice, the vehicle may collide with the real NFZ even if the planned trajectory did not. In this paper, we will address this issue.
There are two solutions. A feasible idea is to ensure that the aircraft will not enter NFZ even in the worst case, which leads to a conservative solution. Let NFZR be the real NFZ, and NFZP be the areas that NFZR may exist. The conservative solution asks the ABHV to bypass the NFZP even if NFZP is much larger than NFZR. It is a bad idea because of three reasons. First, it is a huge waste of aircraft performance. Second, ABHV’s maneuverability and flight range are limited. Bypassing such a large NFZP may cause mission failure. Not to mention the possibility that a NFZP happens to block the way to target. Flying through the NFZP is inevitable in this case. Third, ABHV’s performance is highly influenced by the flight conditions, and bypassing will make the vehicle deviate from the designed optimistic conditions.
Another solution is to tolerate some degree of risk if the probability of failure is below a specified threshold. Therefore, it is reasonable to demand constraint satisfaction with some level of probability of success. This calls for the use of chance constraints. Chance constraints ensure that the decision made by a model leads to a certain probability of complying with constraints. In the chance-constrained optimization (CCOPT), there exist inequality constraints that are formulated as
This paper focuses on solving ABHV’s trajectory planning problem with uncertain NFZ constraints. The rest of this article is organized as follows. Section 2 proposed the major problem of ABHV’s trajectory planning. Section 3 gives a unique hybrid method for ABHV’s trajectory planning that balances efficiency and accuracy. The convexification of chance-constrained NFZ is presented in Section 4. Section 5 presents the numerical simulation results of our methods. This paper concludes with Section 6 by providing a summary, some comments, and pointing some future research directions.
Problem statement
A highly coupled multi constraints aircraft model for integrated flight/propulsion
In this section, we describe the generic trajectory optimization problem for the cruising phase of the airbreathing hypersonic vehicle. Due to the flight/propulsion are highly coupled, the original problem must be formulated in a certain way conducive to the SOCP approach.
Regardless of the Earth rotation, a 3-DOF point-mass translation equations of motion of the ABHV with respect to non-dimensional time







where

where
State and control constraints
The control inputs


The throttle is also limited

We use

For an HGV, the total potential energy is monotonically decreasing during the gliding process because of drag, so an energy-like variable is used as the independent variable of the programing.
27
However, when it comes to an ABHV with scramjet, it is not suitable. As a result, we need to find a new independent variable. In all states in the equations (1)–(7), time
The dynamic equations (1)–(7) can be reduced to 6 dimensions from 7 dimensions.
If we choose time as the independent variable and the terminal time is unavailable, it is hard to define the terminal constraints of the problem. In contrast, terminal mass is easy to be given in a maximum-downrange problem.
Let

Substitute equation (13) into equations (1)–(7), we obtain






Thus the inequality constraints on controls that derived from equations (9)–(12), are given as

The initial and terminal constraints are described respectively by


where
Path and NFZ chance constraints
The heating rate



Equations (23)–(25) can also be expressed as altitude constraints because all of them are functions of

which can also be written as

corresponding to different
Meanwhile, to avoid flying too high, the upper boundary is given by

Thus,

Besides, the velocity of ABHV is also constrained

Equations (26), (29), and (30) yields the normalized path constraints:

An NFZ is an area over which aircraft are not permitted to fly. NFZs may be established for safety, environmental protection, or other reasons. In previous works, the determined NFZs are modeled as no-fly cylinders with given radii and center coordinates:

where
When it comes to uncertainty, things have changed. Due to the initial estimation error or the movement of NFZR, the real NFZR may appear anywhere in a certain area NFZP (As shown in Figure 1). When it becomes inevitable to cross this NFZP, a very natural idea is to turn the original hard NFZ constraint into a soft one: Reducing the risk of passing through the NFZR (which means mission failed) to a certain level. Then we have the following optimization goal: completing the original task based on satisfying the specific probability of success requirement. In this paper, a chance constraint is used to describe the probability of success requirement, which can be derived from the preceding hard NFZ constraint (32):


Uncertain NFZ.
where
ABHV trajectory planning problem with uncertain NFZs
The optimal trajectory planning problem of ABHV with uncertain NFZs is formulated as the following optimal control problem.





The details of the performance index
Trajectory optimization for air-breathing hypersonic vehicle
Considering the lack of a widely recognized ABHV trajectory optimization method so far, this article first proposes a SOCP-based hybrid trajectory planning algorithm before introducing uncertain NFZ.
A typical SOCP has the following form

where
P0 in Section 2.4 contains highly nonlinear dynamics, nonlinear path constraints, and nonconvex control constraints that cannot be directly solved with the framework of SOCP. Blackmore and Liu25–27 introduced lossless convexification techniques and relaxation methodology that convert the original aerospace problem into the specific form required in SOCP. In this chapter, similar techniques are used. Of course, the existing framework 27 needs to be further modified to accommodate the specificity of the air-breathing vehicle problem.
Furthermore, a hybrid method that combines online and offline computing is proposed to balance computational complexity and accuracy.
A hybrid method
P0 contains a four-dimensional control input vector
Solving such a complex optimal control problem in a given time is challenging. To reduce the difficulty of computation and improve efficiency, a hybrid method is introduced:
We hope ABHV can reach the maximum range if needed, which can be approximated in a discretized form

where
The procedure of the hybrid method.

Multi-objective optimization performance index
Without loss of generality, the performance index or cost function of ABHV is given in following form in this paper:

where
Minimum terminal error
In the general trajectory planning problem, we hope that the vehicle will eventually reach a certain designated position. However, direct use of terminal constraint (22) is not good for algorithm convergence.
Thus, the terminal position constraints

are transformed into a performance index

where
Maximum flight range
In a real mission, straight&level flight (
So, use the indicator

Equation (45) is noncovex, so it can be further expanded into a second-order Taylor series to fit the form requirement of SOCP as shown in Liu et al. 27
Minimum time
The performance index with time is

Equation (46) also can be expanded into a second-order Taylor series at each discrete point.
Convexification
Obviously, the problem P0 does not conform to the general SOCP form (39), so it still needs to be convexified and simplified. The process is given below.
Convexification of control constraints
As shown in Table 1, the only two control inputs that need to be handled are


Liu et al. 27 assures that this condition will hold in the solution of the original problem. Obviously, the restructured constraint (47) is second-order cone and is suitable for SOCP.
Convexification of path constraints
In Section 2, the heating rate, dynamic pressure, and overload constraints, which are regarded as path constraints, were restructured into altitude constraint (26). The max function in

where
Linearization of dynamics
The nonlinear dynamics must be approximately linearized before applying the optimization algorithm. To improve the convergence and robustness of the algorithm, the computing process is designed as an iteration: A pre-designed linear trajectory is used as the initial guess reference trajectory at the first iteration, then the reference trajectory will be updated with the result of k-th iteration
Decouple the right side of equation (35) and rewrite it in a concise form 25

where

In the offline part, the optimal
To solve the dynamic problem, the equation (51) must be linearized. Let

where
In order to ensure the reliability of linearization, a new constraint (54) including a trust-region column vector

As a result, P0 is transformed into P1 with given










where
Discretization and the solution procedure of online part
In order to be solved by numerical algorithms, continuous systems in optimization problems are always discretized in practice. Of course, all the constraints must be satisfied at these discrete points. In this case, the independent variable is
where

where
By combining the state variable

As a result, the whole discrete equation is given by

where

Obviously, the discretized constraints and performance index respectively illuminated from Section 3.2 through 3.3 are a linear function of









All of the constraints in P2 are either linear or second-order, and the performance index is linear, too. Therefore, the problem P2 is SOCP, which can be solved with primal-dual interior point method. Note that the dimension of
Details of the iteration procedure of P2 in the online part.

According to several test results and Liu et al.,
27
the

Convexification of NFZ chance-constraints
Single NFZ chance-constraint
In Section 2.3, the uncertain NFZ is converted into a chance constraint optimization problem. These NFZ constraints are obviously concave so they cannot be substituted into the solving process directly. Whereas as shown in Liu et al., 27 if the concave constraints are discounted, the concave constraints can be approximated successively by its linearized form, for example:
The hard NFZ constraint (32) is equal to

where

Similarly, the chance constraint is used to describe the probability of success requirement, which can be derived from the preceding linearized hard NFZ constraint (82):

Without loss of generality, the exact location of NFZR is unknown, so let the center coordinates be individual Gaussian-distribution uncertain parameters.

where
For the convenience of expression, let

where the corresponding variance
Then equation (84) can be rewritten as

Consider

then

hence

where

which happens to be a second-order cone constraint for any

Note that if those uncertain parameters are not individual, it will become a much more challenging problem and requires more undiscovered skills to be solved.
Multiple NFZ chance-constraints
Let

where
In order to apply the proposed analytic approximation method, we give the following relation

In fact, equation (94) follows from this generic inequality

Consequently,

implies that

So inequality (96) is stronger than constraint (93). If (96) holds, the trajectory must satisfy the multiple NFZ chance-constraints. Note that the log-sum-exp function in equation (96) is convex and the detailed proof can be found in book. 16 As a result, the multiple NFZ chance-constraints do not affect the convexity of the whole problem. To handle with (96), the log-sum-exp can be firstly linearized, then convert the result into a hard boundary with the technique in Section 3.6.1.
Numerical experiment
In this section, a series of numerical simulation demonstrations will be given to prove the effectiveness of the method described in this paper.
All these experiments are based on a generic research ABHV model called BABHV-1 (Figure 2), which is developed by Beihang University. It is a concept design for a 5-ton class reusable single-stage spaceplane, using a scramjet engine propulsion system. It has a tailless delta wing similar to SR-71. The purpose of this aircraft is to study the flight characteristics and control strategies of the air-breathing hypersonic vehicle at different speeds. Currently, a scaled model has been produced for the low-speed test flight. This design is capable of cruising at an altitude ranging from 24 to 32 km (Relative sea level) with a cruise Mach number of 5.0–7.5. As shown in Figures 3 and 4, the aerodynamic and thrust coefficients vary with flight conditions and throttle.
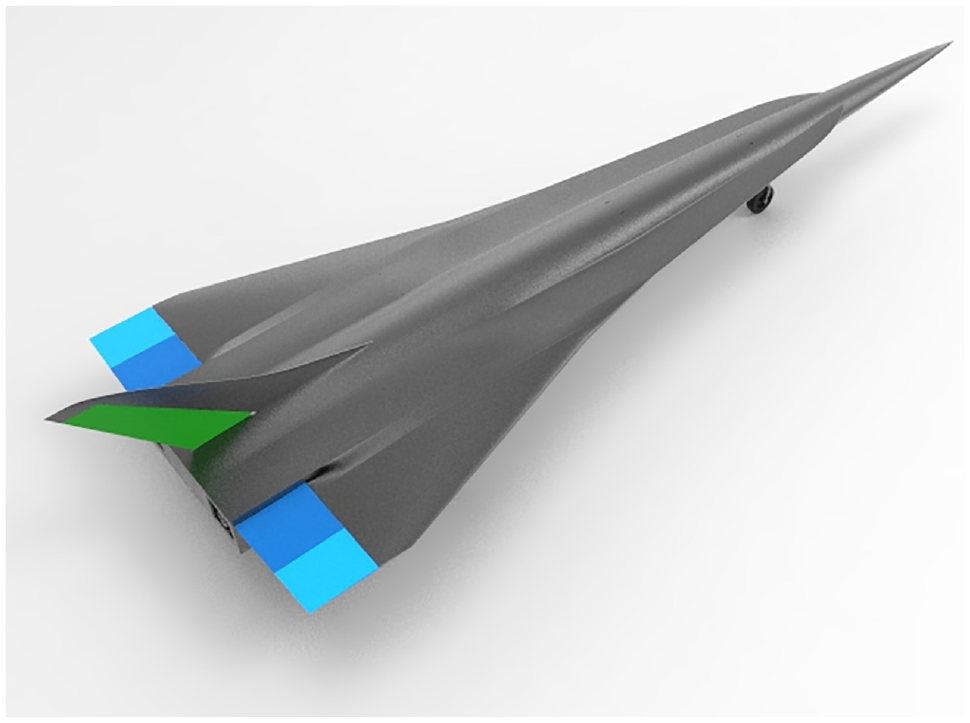
3D model and performance of BABHV-1.

Thrust coefficient surface plot of BABHV-1.

Lift coefficient surface plot of BABHV-1 (
In all applications in this section, we select a value
Verify the accuracy of the algorithm
Before introducing the uncertain NFZ, a test is conducted to assure that the trajectory provided by the proposed algorithm is accurate and flyable. This verification is based on the following assumptions: We first simulate an open-loop trajectory randomly and then use the terminal conditions of the open-loop trajectory as the terminal constraint to test whether the task can be reproduced by SOCP. If it can, it proves that the proposed method is accurate and can be trusted.
For this mission, the initial and the terminal condition are given in Table 3. The optimization index

Initial and terminal conditions.

The values of the limits in the path constraints in equations (24)–(26) are as follows:
Before reaching the stopping criterion in (81), five iterations (k = 5) were carried out. Figures 5 to 7 show the comparison between open-loop simulation and solution by SOCP. It can be seen see that SOCP accurately reproduces the open-loop simulation trajectory. The deviation of all terminal states is only 0.5%−1%, which strongly proves the effectiveness of this method.
Ground track comparison.

Altitude comparison.
Velocity comparison.
Single uncertain NFZ
In this mission, we assume that there is an uncertain cylindrical NFZR, the center coordinates of which are difficult to determine. The source of uncertainty can be vague intelligence, modeling errors, or movement of the NFZR itself. However, an initial guess of the center coordinates

which helps ABHV reach the target in the shortest time.
The initial and terminal conditions of the mission are given in Table 4. The target has a downrange of 792.2 km and a left crossrange of 107.6 km. The values of the limits in the path constraints are as follows:
Initial and terminal conditions.

Parameters of uncertain NFZ.

Figure 8 shows the ground track. For comparison, the solution without uncertain NFZ is also obtained as the baseline. Both trajectories do fly through the NFZP, but the solution that considering the uncertain NFZ is farther away from the
Ground track comparison.
More comparison is given in Figures 9 to 13. In Figure 9 we can see the vehicle turns right then left to steer away from the uncertain NFZ in solution 2. Its trajectory is more curved than the baseline. Figure 12 shows that angle of attack and throttle changes with flight conditions. As the altitude decreases, the air density gradually increases, so the required trim angle of attack decreases. This will result in a decrease in drag and the throttle required. The heating rate and dynamic pressure, and normal load histories are plotted in Figure 13. All two solution satisfies path constraints.
Bank angle and velocity comparison.

Altitude and heading comparison.

Flight-path angle comparison.

Angle of attack and throttle comparison.

Heating rate, dynamic pressure, and normal load histories.
Multiple uncertain NFZs
In this mission, we assume that there exist two uncertain NFZs (Table 6). The areas where they may exist happens to be on the path to the target. The vehicle’s path constraints, initial and terminal conditions are the same as in section 4.3. Use the method described in section 4.2 to handle multiple chance constraints. The value of the probability of success threshold P* is still 90%.
Parameters of uncertain NFZs.

The ground track of the solution subject to the multiple NFZs chance constraints is shown in Figure 14.
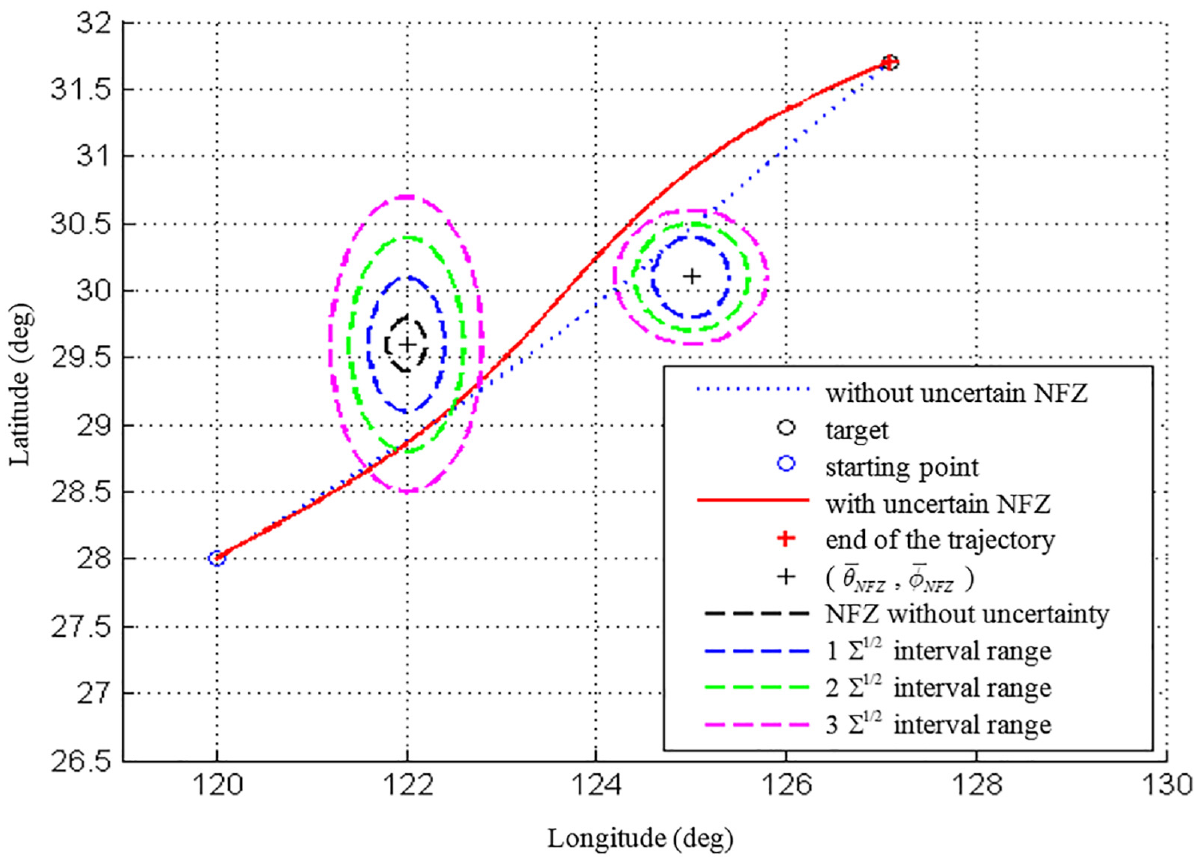
Ground track with two uncertain NFZs.
The trajectory without NFZ constraints flies through both NFZP, whereas the trajectory with the uncertain NFZ constraints grazes the 90% boundary. In order to verify the correctness of the results, a Monte Carlo simulation was carried out. First, 1000 NFZs combinations that follow the distribution in Table 6 are randomly generated. Next, we check whether the trajectory violates the constraints formed by the these NFZs combinations. Table 7 shows that the trajectory has a 91.7% probability of not colliding with the real no-fly zone, which is higher than the set threshold. This result strongly supports the method in this paper.
Monte Carlo simulation.

The corresponding control input and states are shown in Figures 15 and 16.
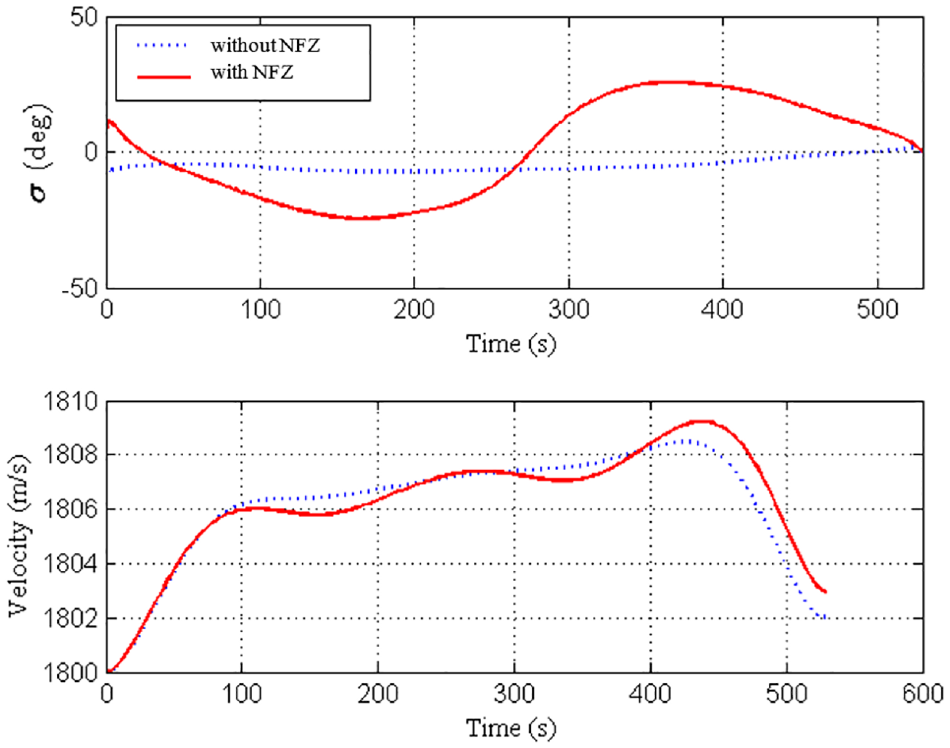
Bank angle and velocity comparison.

Altitude and heading comparison.
Capability test
The previous section demonstrates that the algorithm can handle multiple uncertain no-fly zones. Then, further tests were performed to show how the shape and location of uncertain NFZs influenced the trajectory, in other words, how robust the new algorithm is.
The position of NFZ1 is changed to compress the vehicle’s activity space (Table 8). We want to test whether the vehicle can still satisfy the chance constraint under more extreme conditions.
Parameters of uncertain NFZs.

Compared to the previous simulation results, the vehicle performs a more violent maneuver when approaching NFZ1 to achieve a given success rate (Figure 17). Similarly, a Monte Carlo simulation is performed for the new trajectory (Table 9), which guarantees the satisfaction of chance constraints (92.3% > p*).

Ground track with the distance between two uncertain NFZs changed.
Monte Carlo simulation.

In addition, we change the variance of the coordinate position of the NFZ’s center (Table 10). Table 11 and Figure 18 demonstrate the same conclusion: the algorithm proposed in this paper has a strong robustness.
Parameters of uncertain NFZs.

Monte Carlo simulation.


Ground track with the variance of uncertain NFZs changed.
Conclusion
According to the flight characteristics of ABHV, this paper proposes a hybrid optimization method first. The numerical demonstrations show that this method can effectively solve the trajectory optimization problem of ABHV. Then we discuss the situation with uncertain NFZ. As a result, the uncertain NFZs that may exist are modeled as chance constraints. On this basis, a convexification method is proposed, which can convert the concave chance constraint into a deterministic constraint that can be solved by convex optimization. Furthermore, it is further extended to situations where there are multiple uncertain NFZs.
In the past research, environmental uncertainty in hypersonic vehicle trajectory optimization was rarely discussed, let alone integrated into the optimization algorithm. The preliminary results obtained expand our understanding of convex optimization in complex aerospace engineering.
Footnotes
Handling Editor: Chenhui Liang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.