
Abstract
In this article, fuzzy model predictive control of flexible air-breathing hypersonic vehicles with unmodeled actuator sensor failures is proposed. The actuator sensor of flexible air-breathing hypersonic vehicle is assumed to suffer from some failures, which are difficult to be modeled. A control-oriented model of sensor failures is derived from the statistics law of input and output data of the sensor. A Takagi–Sugeno fuzzy model is utilized to approach the longitudinal dynamics model of flexible air-breathing hypersonic vehicles. Then, fuzzy model predictive control is proposed. A Lyapunov function approach is utilized and a set of linear matrix inequalities are given to solve the corresponding controller optimization problem. Simulation results are given to show the excellent reference altitude and velocity tracking performance of the proposed controller design method.
Keywords
Introduction
Flexible air-breathing hypersonic vehicles (FAHVs) are a kind of novel vehicles which can fly at a speed with more than 5 Mach number. FAHVs can carry more payload than traditional flight vehicles since these can obtain oxygen directly from atmosphere. FAHVs present a more cost-efficient way to make access to space routine, or even make the space travel routine and intercontinental travel as easy as intercity travel. 1 But because of the adopting of airframe integrated technology, the interactions between the elastic airframe, the propulsion system, and the structural dynamics are very strong, which make modeling and flight control of such vehicles a challenge problem. 2
The control of FAHVs has attracted much attention in recent years. In Parker et al., 3 a control-oriented model is developed using curve fits calculated directly from the forces and moments included in the truth model. Based on the control-oriented model, several studies on the flight control are conducted. In Xu et al., 4 and in Jankovsky et al., 5 output feedback control design methods for FAHVs are discussed. In Fiorentini et al., 6 a nonlinear robust adaptive control design method is presented for FAHVs. The non-minimum phase characteristics of FAHVs are discussed in Hu et al., 7 and then a stable inversion-based nonlinear controller is given. Adaptive sliding mode controller is also proposed to drive the nonlinear dynamics of FAHVs. 8 But the nonlinear dynamics and the flight environment of FAHVs are high complex, the aerodynamics parameters vary quickly, so the robust control of FAHVs is still a pendent problem.
Takagi–Sugeno (T-S) fuzzy control scheme is an efficient way for the control approach of nonlinear system, which could approximate any smooth nonlinear function to any specified accuracy within any compact set. 9 Through fuzzy If-Then rules, the nonlinear system can be represented by a set of linear models, and then the traditional linear controller design methods can be utilized. The fuzzy controller design for FAHVs has been discussed in literature. In Hu et al., 10 T-S fuzzy approach of FAHVs and fuzzy-guaranteed cost controller are proposed, and in Hu et al., 11 fuzzy stable inversion-based tracking controller of FAHVs is presented. So in this article, T-S fuzzy approach is utilized for the controller design of FAHVs.
Similar to other airplanes and space vehicles, the actuator sensor of FAHVs is not completely reliable, which means that possible failures are not avoidable. The failures of actuator sensor are caused by electromagnetism disturbances, imperfect communication links, break or loss of effectiveness of the inner component and so on, so it is difficult to develop an accurate model for the actuator sensor failures. The actuator sensor failures may make the control system of FAHVs unsafe or unreliable, so the reliable control against possible actuator sensor failures is unavoidable, especially when the failures are hard to be modeled. The fuzzy-reliable control of FAHVs has been studied in Hu et al., 12 but the failures considered in this article is loss of effectiveness, which is a simplified case of the failures. Actually, the accurate model of actuator failures is hard to be built, and what we can get is only the input and output data of actuator sensor. By the measurable data, the statistical characteristics of the failures can be derived. In this case, we can model the actuator sensor failures via a stochastic approach. Based on the stochastic model of the actuator sensor failures, we can design a fuzzy-reliable controller to stabilize the whole system. Motivated by the above discussions, fuzzy model predictive control (FMPC) of FAHVs with actuator sensor failures is studied in this article. Based on the T-S fuzzy modeling technology, a T-S fuzzy model of FAHVs is first constructed, and then actuator sensor failures are control-oriented modeled by stochastic approach. The control objective is proposed and a FMPC design method is developed by Lyapunov approach. The existence conditions of the corresponding controller optimization problem are formulated in the form of liner matrix inequalities. Finally, an illustrative example is provided to show the effectiveness and advantage of the proposed control design method.
The rest of this article is organized as follows. In section “Problem Formulation,” the dynamic model of FAHVs, the actuator sensor failures, and the control objective of the article are established. The design method of FMPC is presented in section “Fuzzy model predictive control design.” An example is given to illustrate the applicability of the proposed approach in section “Simulation Results.” Finally, we conclude the article in section “Conclusion.”
Notation
The notations used throughout the article are fairly standard. The superscript ‘T’ stands for matrix transposition;
Problem formulation
In this section, the nonlinear model and fuzzy model of FAHVs are established. The actuator sensor failures of the system are also control-oriented model. Then, the FMPC problem is organized.
Nonlinear model of FAHVs
The nonlinear model of FAHVs considered in this article is developed by Bolender and Doman.13,14 The model is complex since the flexibility effects are included in the model. For describing conveniently, the sketch of the vehicle is given in Figure 1. Associated with Figure 1, the nonlinear dynamics of FAHVs can be described as follows

In equation (1), h and V represent the flight altitude and velocity, respectively;






with








This nonlinear model is composed of five rigid body state variables

Geometry of the flexible hypersonic vehicle model.
Fuzzy model of FAHVs
From section “Nonlinear model of FAHVs,” we can see that the nonlinear model of FAHVs is extremely complex, so it is difficult to design a nonlinear controller directly. Fuzzy model technology has been widely used for approaching and controller design of nonlinear system and is said to be greatly useful, so we utilize the well-known T-S fuzzy model technology to approach the nonlinear systems (1). By selecting some states or the combination of the states as premise variables, the nonlinear model (1) of FAHVs can then be described by a set of linear models combined by fuzzy membership functions. Then, the nonlinear model of FAHVs (1) can be represented by the following fuzzy model
If

where

where
Actuator sensor failures
When the control signal has been computed according to the designed control strategy, this signal should be transferred from the computer to actuating mechanism. For FAHVs, the actuating mechanism is scramjet engine and aerodynamic elevator. The sensor which transferring this control signal is actuator sensor. In this article, we consider the failures of actuator sensor. The actuator sensor failures are hard to be accurately modeled, and what we can got is just the input and output data of the sensor. From the input–output data, the statistical characteristics of the sensor failures can be derived. According to the statistical characteristics, in this article, we model the actuator sensor failures via a stochastic approach, that is

where


Remark 1
The actuator sensor failures considered in this article are more complex than original ones mentioned in literature. 12 Since in the previous literature, the actuator sensor faults are considered to be loss of effectiveness, which are easily to be dealt with.
Control objective
For a flight vehicle, the main task is to track a given command without steady-error, which means

where

then

Combining the tracking error and the fuzzy model of FAHVs, an augmented fuzzy state-space system can be obtained
If

where


For description brevity, the above equation is written as

where

Based on the parallel distributed compensation (PDC) concept, when the actuator sensor failures do not exist, an ideal fuzzy state-feedback controller for (6) can be constructed as

where
Unfortunately, in the existence of actuator sensor failures, the fuzzy controller (7) is not suitable. In this case, the closed-loop system is given by

where
Then, the command tracking of FAHVs can be transformed into the closed-loop stability of the augmented state-space system (9). Consider FAHVs with actuator sensor failures, the control objective is to find a state-feedback controller, such that
The closed-loop system is robustly stable;
The output of the system can track a command vector
In the existence of unknown actuator sensor failures, the stability and the tracking performance of the system can be guaranteed.
FMPC design
In this section, stochastic control of FAHVs with actuator sensor failures will be investigated. Since the dynamic model of the actuator sensor faults is difficult to be built, we model the actuator sensor failures via a stochastic approach. This approach makes the control design of FAHVs a challenging problem. Model predictive control (MPC) is said to be a great way for control design of constraint system, no matter what kind of constraint. The stochastic model of the actuator sensor failures can also be regarded as a constraint, so in this article, MPC will be utilized here to solve the stochastic control design problem of FAHVs with actuator sensor faults.
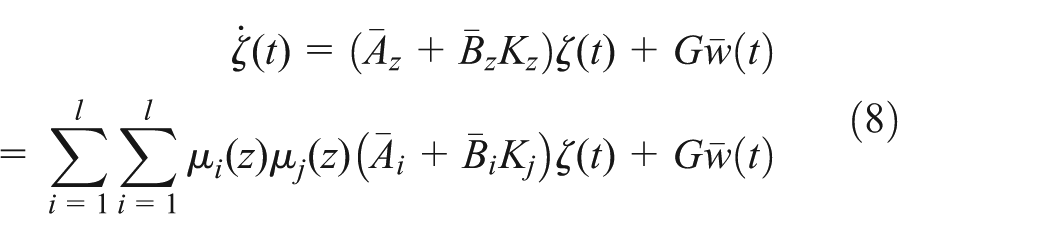
For the application of MPC, the fuzzy closed-loop model (9) should be transformed into a discrete model, 15 which is listed as follows

where
Considering the control objective given in section “Control objective” and the design approach of MPC, the following performance functions are chosen

where
Remark 2
Since the fuzzy model (3) cannot exactly approach the nonlinear model of FAHVs (1), fuzzy modeling error is inevitable. In this case, the proposed FMPC strategy can only guarantee the robust stability of the closed-loop system. When the state of (9) only converges to a bounded region, a performance function
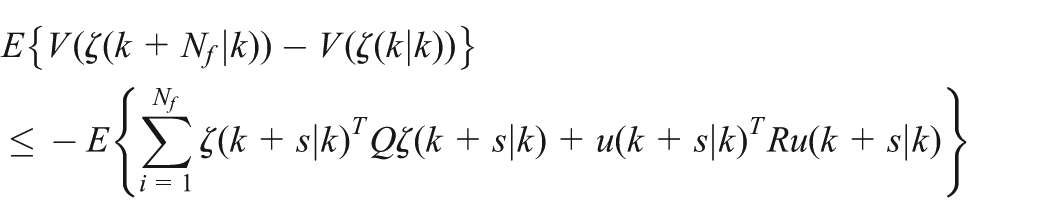
So, the control objective of FMPC minimized the performance function (11), and stabilized the closed-loop system (9). In the existence of the stochastic actuator sensor failures model, the fuzzy model (9) should be stochastically stable, so we define a quadratic function

Then, we can easily get that from
Also, with

Then, we can choose a variable

A fuzzy predictive controller, which can stabilize the fuzzy system and minimize the performance function in (11), is designed and converted to a solution of an optimization problem.
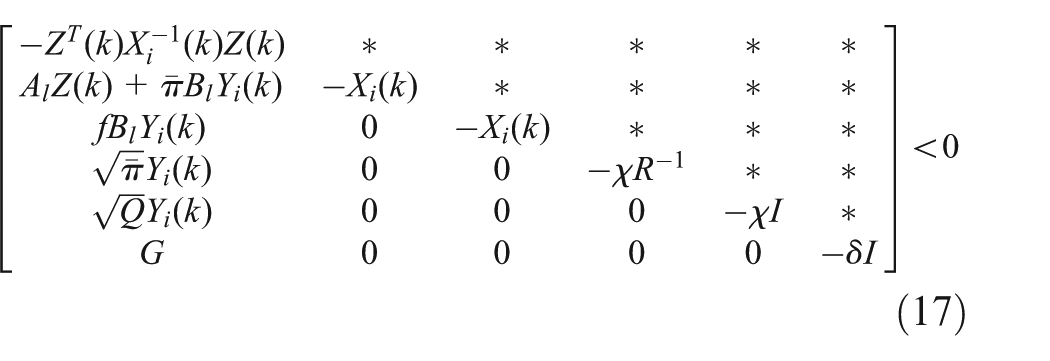
Theorem 1
Suppose the success rate of the data transmission

with the following inequalities


where

Proof
Suppose there exist

which means

Then, (14) can be transformed into
Perform a congruence transformation to (17) by diag

By Schur complement, (18) is equivalent to

By defining

So, we can get the following inequality

where


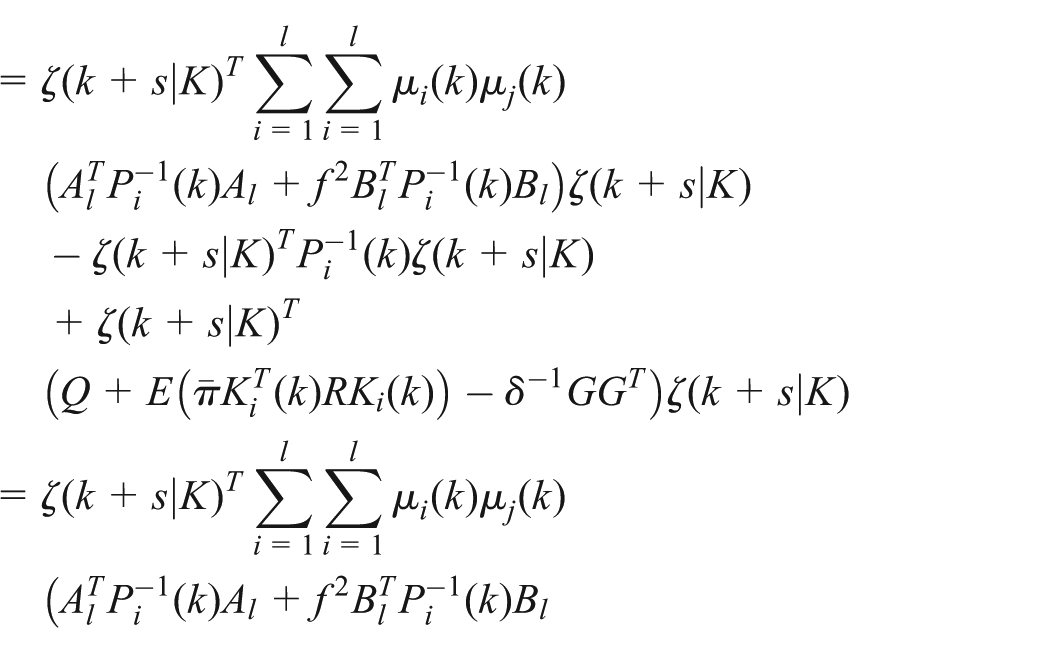

So, we can seen from (12) that

According to Lemma 1 proposed in Zhao et al., 16 we know that

Summing up the inequality on both sides from

where
Since
Multiplying a congruence transformation to (13) by diag

By Schur complement, it is equivalent to

So, the performance function (11) is satisfied. The proof is completed. ▪
Simulation results
In this section, a numerical example is given to test the effectiveness and advantages of the FMPC method for FAHVs with actuator sensor failures. The parameter values of FAHVs model are similar to Hu et al.
10
When constituting fuzzy model, velocity V is selected as the premise variable, and is supposed to have three levels: a lower bound, an upper bound, and an equilibrium point, which is named as “small (S),”“big (B),” and “middle (M),” respectively. More specifically,
Rule 1. If V is small

Rule 2. If V is middle

Rule 3. If V is big

where the matrices of the fuzzy model are






The fuzzy modeling error

whose maximum absolute
The fuzzy membership functions of V is defined as follows

The membership function of the fuzzy model is shown in Figure 2.

Membership functions of V.
Considering the structural strength, the given command should have reasonable requirements for FAHVs, so the set point input reference commands are forced to pass through a pre-filter as

where
The success rate of the data transmission from the sensor to the controller
In simulation, we consider a climbing maneuver using separate reference commands for altitude and velocity. The altitude reference

Tracking performance.
The other important states and the inputs of FAHVs are shown in Figures 4 and 5, respectively. The angle of attack and flight path angle are shown in Figure 4. The inputs of the plant are shown in 5. The angle of attack, flight path angle, and inputs are all smooth and bounded.

Angle of attack and flight path angle.

Input of plant.
Conclusion
In this article, a FMPC strategy has been presented for FAHVs with actuator sensor failures. The fuzzy approach is utilized to model the nonlinear dynamics of FAHVs, and the actuator sensor failures are modeled by a stochastic approach. By defining an augmented system, the tracking problem of FAHVs has been transformed into a stable problem of the closed-loop system. Using Lyapunov method, sufficient conditions for such a controller design problem have been proposed in terms of linear matrix inequalities (LMIs). Simulation results have shown the effectiveness of the proposed strategy.
Footnotes
Academic Editor: Zheng Chen
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was partially supported by National Natural Science Foundation of China (61304001 and 61304239).