
Abstract
An impact sprinkler loaded on a remote control trailer can be used for motion to improve the efficiency of a single Hard Hose Traveler in small and medium-sized irregular fields. Herein, a model for calculating the combination uniformity coefficient (CU) was established in the square test area under two-directional motion. The accuracy of the irrigation uniformity model was verified using the test data of application depth (hn). The results revealed that the nozzle diameter, speed of sprinkler motion (v), and motion methods can significantly impact the average application depth (
Keywords
Introduction
Agricultural irrigation equipment mainly includes Center-pivot Irrigation Systems, Lateral-move Sprinkler Irrigation Systems, and Hard Hose Travelers. 1 Each equipment above has advantages and disadvantages. For instance, although the Center-pivot Irrigation System has a higher degree of automation, terrain, topography, and windbreak forest belts affect its application. Moreover, a Hard Hose Traveler is convenient for maneuvering, but it is less autonomous. 2 Therefore, an intelligent irrigation machine that can flexibly retract and release pipelines, autonomously control the sprinkler speed, and move in multiple directions is necessary to meet the needs of field irrigation environments (an intelligent irrigation machine that uses the Hard Hose Traveler and remote control). Furthermore, an intelligent irrigation machine can drive on the paths of the field. As a result, the two types of sprinklers should be designed on both sides of the path. The rotation angle of the sprinklers is temporarily taken as 180° (Figure 1). This machine uses a fixed large inlet flow rate to improve the efficiency of sprinkler irrigation (to spray more water in the field within a certain period). Variable rate irrigation can be achieved by changing the sprinkler speed. The Hard Hose Traveler sprinkler can be engineered to move while it irrigates. Multi-directional motion equipment can also be used to irrigate small and medium-sized irregular fields and hilly upland and mountainous terraces, indicating that a single device can irrigate and improve the efficiency of a single Hard Hose Traveler machine. The adjacent area of the irrigation strip near the traditional Hard Hose Traveler limits the efficiency of the irrigation system. 3 This study provides a method to plan the paths using configurational characteristics, including a sprinkler model, jet range of the sprinkler, and a combinational distance of the intelligent irrigation machine. A method for dividing the field using red rectangles (Figure 2, where the green line represents the path) has also been used to realize irrigation without corners in a field. Combinational distance was chosen as the side length of the rectangle to ensure the precipitation depth and sprinkler irrigation uniformity in the field. Many intelligent agricultural machines have successfully implemented unmanned driving applications through path planning.4,5 However, the realization of unmanned driving of an intelligent irrigation machine is still under exploration. Therefore, it is necessary to assess the irrigation performance of two-directional motion with 90°. The linear motion of the sprinkler in two directions should be used for combined sprinkler irrigation to meet the needs of sprinkler irrigation in the motion path division, ensure the regularity of the field irrigation, reduce the excessive overlap of the sprinkler irrigation measure area, and prevent the motion path to occupy the planting area. In this study, the application area was a special unit, which only a few studies have explored.

Two types of sprinklers and rotation angle.
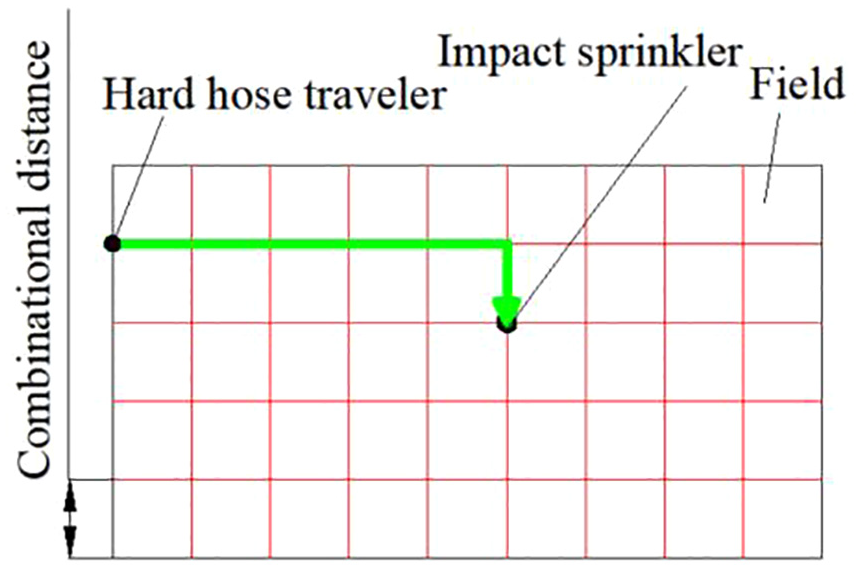
A method for dividing the field.
Currently, the gradual adjustment of multiple sprinklers, 6 the establishment of a reasonable start-stop sequence of the irrigation system, 7 the use of solenoid valves to control the flow of sprinklers, 8 the acquisition of geographic information based on a GPS signal or wireless transmission, the automatic-controlled motion of a sprinkler using PLC, 9 and a change in the position of dolly bar at the nozzle using a microcomputer-controlled stepping motor are the main methods for variable rate irrigation with sprinkler irrigation equipment. 10 Herein, the speed of the sprinkler motion was controlled by the intelligent sprinkler irrigation machine to meet the physiological and ecological water requirements of crops, 11 thus changing the average application depth.
The CU value is a key index 12 for evaluating the hydraulic performance of motion irrigation using irrigation equipment 13 and the combined irrigation of the sprinklers. 14 However, they are affected by working conditions 15 and natural environmental factors, such as temperature and humidity.16,17 Many researchers have explored the relationship of the working conditions between the CU value and average application depth when there are other irregular factors in the experiment by establishing a calculation model. The CU value of a Hard Hose Traveler in the field for a few single machines is greater than 80% (average value, 62%),18,19 indicating a relatively poor effect. As a result, studies have assessed the combination distance between two types of Hard Hose Travelers. A motion model was established using cubic spline interpolation, Lagrangian interpolation, polynomial fitting, and simplified geometric curves and verified using experimental values to calculate the radial water distribution of the Hard Hose Traveler.20,21 The maximum deviation of the spline curve and the polynomial fitting was less than 10% of the experimental values. The CU value of the polynomial fitting model calculation was at least 85% when the combination distance was 1.5–1.7 R. Wu, 22 Bittinger and Longenbaugh, 23 and Prado and Colombo 24 simplified the radial water distribution into triangle, ellipse, or circle to study the CU value through a calculation model. However, the simplified method of radial water had poor accuracy. The above model could only be used in the straight-line movement of the sprinkler. The average precipitation depth and CU value of the two-directional motion of the sprinkler were not studied. Three types of nozzles of the Rotating Plate Sprinkler R3000 were used to calculate the CU value, and the results showed that the deviation between the test and calculated values was between 0.5% and 11.0%, and the highest calculated values were 75.9%, 78.2%, and 85.1%. 25 A Negative Pressure Feedback Jet Sprinkler with double nozzles was also designed. The combinations of the comprehensive hydraulic performance of four types of nozzles were evaluated using a weighted scoring method. 26 A nozzle diameter of 5 × 4 mm (5 and 4 mm indicate the diameter of the first and second nozzles, respectively) was the most effective, with an average application rate of between 3.81 and 4.38 mm h−1 (CU value, 82.5%–86.0%). The translational Lateral-move Sprinkler Irrigation System moved between 10% and 100% at the highest speed with a CU value between 92% and 96%. 27 The CU value slightly decreased as the speed increased. Moreover, the average application rates were correlated with motion speeds. The CU value gradually decreased when using a Center-pivot Irrigation System with increasing moving speed. 28 The above studies show that the nozzle diameter, combination method, and motion speed affect the CU value and the average application depth and rate. The working pressures 29 and rotation angles 30 also affect CU values. This paper has discussed the above factors since the study focuses on the two-directional motion irrigation of the intelligent irrigation machine.
The model used to calculate the CU value was established via the frequency of application, while the sprinkler moved along two directions and the radial application depth curve during one rotation of the fixed sprinkler. The accuracy of the model was verified using the experimental data of application depth. The change rule of the CU value and the average application depth were investigated using different nozzle diameters, sprinkler motion speeds, and sprinkler motion methods. Therefore, this study can provide a reference for the intelligent motion of the sprinkler.
The model of irrigation uniformity along two-directional motion
A radial water distribution curve based on the cubic spline polynomial
The superposition method of calculating the motion water volume of the sprinkler was based on the radial water distribution of the fixed sprinkling irrigation in the test room. In this study, a 30PY2 impact sprinkler (flow rate, 9.85 m3 h−1) and five types of nozzle diameters were used following the Chinese national standards. 31 Testing and determination showed that the working pressures of the nozzle diameter of 10.0 × 5.0 mm (10.0 and 5.0 mm indicate the diameter of the first and second nozzles, respectively), 10.5 × 4.5 mm, 10.5 × 5.0 mm, 11.0 × 5.0 mm, and 11.5 × 5.0 mm were 490, 450, 410, 360, and 310 kPa, respectively. The working pressure changed as the nozzle diameter changed. The impact sprinkler was rotated 360° and operated for 1.0 h under the same flow rate. The jet range and water distribution curve of each nozzle were different (Figure 3). The deviation between the test and the calculated values (the quotient of the flow rate set and the area of sprinkler irrigation) of the average application rate in all nozzles was within 4% based on the verification of radial water distribution shown by Seginer et al. 32 and Molle. 33 The data of water volume distribution curve was relatively reliable. The cubic spline function interpolation method was used to calculate the radial water distribution of the sprinkler based on previous research. 34 The water distribution line is shown in equation (1). The rotation period of the sprinkler t(s) was recorded when the sprinkler rotated at 180°. The application frequency K of the fixed sprinkling irrigation is shown in equation (2).



Radial water distribution curve of different nozzle diameters at a constant flow rate.
Accumulation of water from the motion sprinkler
The superposition method of motion water volume was calculated using the total frequency of application during the sprinkler motion and the radial application depth line once during the fixed sprinkler rotation. The sprinkler moved linearly along the x- and y-axes to irrigate (Figure 4). The motion path formed a Cartesian coordinate system, with R representing the range of the sprinkler. The sprinkler positions on the y-axis when point M starts and stops receiving water are represented with Mstart and Mend, respectively. L (m) and R represent the distance between the two positions and the distance between the two positions and the point M, respectively. The distance from point M to the sprinkler was <R when the sprinkler moved to point 0. This point is not completely watered as the sprinkler moves along the y-axis, and thus the amount of water received should be supplemented by sprinkler motion along the x-axis.

The water condition of an M point during the sprinkler motion.
The speed of distribution of the sprinkler motion on the x and y axes was symmetrical at the 45° oblique line. The sprinkler started from 2R on the y-axis and finished at 2R on the x-axis. The calculated area of water received was R2 and the rotation angle of the sprinkler was 180°. The dynamic process of the sprinkler included motion along the coordinate axis and periodical rotation. The motion distance of the sprinkler was divided into multiple units based on the rotation period of the sprinkler. Two dynamic processes were independent during the calculation process. The distance between point M and the sprinkler was calculated when the sprinkler was at each unit. The result was factored into formula (1) to obtain the application depth. When the sprinkler motion was finished, the total application depth of M point was calculated as the sum of the water received in each unit.
Four hypotheses were proposed based on the information above: (1) The sprinkler jet morphology and the water distribution in the range of water application are the same during each rotation period. (2) The value of change in distance between the point measured and sprinkler should be ignored during each rotation period. (3) The delay time of motion is negligible when the remote control trailer turns at the coordinate axis point 0. (4) The influence of wind speed and direction, temperature, and humidity on the water distribution under natural conditions should be neglected.
First, using the uniform motion of the sprinkler along the y-axis as an example, the distance l (m) between the position of the sprinkler and the projection position of M on the y-axis is shown in equation (3) when point M starts to receive water (Figure 4). The distance Δl (m) of the sprinkler in one rotation period is shown in equation (4). The distance S (m) in the figure represents the length from the nozzle position to 0 when point M receives water. S > L when point M is completely exposed to water and S = L if point M is not completely exposed to water. Distance L (m) was divided into n units (equation (5)). The j∈(0, n) was then used to label the Δl (m) unit and used in equation (6) to calculate sprinkler distance ΔL (m) from the point Mstart to the j unit. The distance dj (m) from unit j to point M is shown in equation (7).





The application depth hy(dj) (mm) of point M in one period of rotation of the sprinkler and the application depth hyn (mm) in the n periods of rotation were calculated using equations (8) and (9), respectively.


Similarly, the application depth hxn (mm) at point M when the uniform speed of sprinkler moves along the x-axis was calculated as shown in equation (10). The total application depth hn (mm) at point M after the sprinkler motion on the x- and y-axes was calculated as shown in equation (11).


The average application depth and the combination uniformity coefficient
The measuring point adopted a 1.5 × 1.5 m square arrangement following the Chinese national standard 35 (Figure 5). The average application depth is shown in equation (12). The model shown above can be used to calculate the combination uniformity coefficient (Christiansen uniformity coefficient) of the sprinkler motion 36 using equation (13).



Schematic diagram of vertical two-directional motion combination.
Verification of the average application depth
In this study, the straight-line motion of the sprinklers and one row of the measuring points completely exposed to water were adopted to verify the accuracy of the application depth of the calculated and test values. The complete exposure to water indicated that all the measuring points in that row experienced rainfall from the beginning to end as the sprinkler passed. The test was conducted in the Lizhong Agricultural Machinery Cooperative in Huantai, Zibo City, Shandong Province, China. The lateral line of the measuring point was perpendicular to the motion path, and the buckets were arranged in the form of 1.5 × 1.5 m with four rows based on the Chinese national standard 35 (Figure 6). The required speed of the sprinkler was realized, and the sprinkler was moved through mechanical dragging. The average value of application depth was recorded after completing the test, and a lateral line of the measuring point completely exposed to water was obtained. A JP50-180 Hard Hose Traveler, a 30PY2 impact sprinkler, and a 10.5 × 4.5 mm nozzle diameter were selected in the test. The speed of sprinkler motion was 35 m h−1, and the flow rate was 9.96 m3 h−1. The spraying sector that covered the test zone, the height of installation of the sprinkler, and the opening diameter of the plastic barrel were 180°; 1.3 m and 200 mm, respectively. The sprinkler was 170 mm high. The environmental parameters included gusts and wind speed ranging from 1.23 to 2.55 m s−1. The relative air temperature and humidity were maintained at 12.3°C and 24.82%, respectively. The nozzle parameters under these working conditions were extracted from Figure 1 and substituted into the model to calculate the depth of each point of measurement. The test value was compared using the calculated value.

Bucket layout and sprinkler irrigation test site diagram.
The calculated value and the test value curve of the application depth as the sprinkler moved are shown in Figure 7. The average application depth was between 10.46 and 11.28 mm. The calculated value comprised 92.6% of the test value. The test value was slightly higher than the calculated value. The minimum and maximum deviations were 10.5 m (deviation rate, 0%) and 15 m (deviation rate, 20.9%), respectively. However, the application depth at this point was very small, with a large deviation rate. The trend of the application depth test value curve was similar to the calculated value, indicating that the calculated value is accurate. However, there were some deviations. Besides the calculation of the model and test deviations, the deviations could be due to the evaporative drift of water and the deviation rate (4%) of the radial water distribution curve. Therefore, the test value can verify the correctness and reliability of the calculation method.
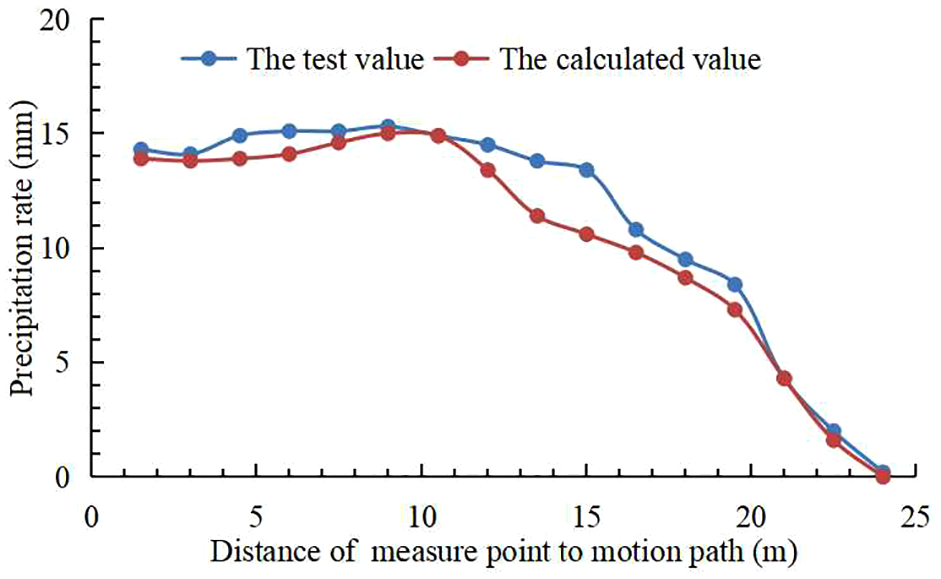
Application depth curves of the calculated and test values.
Irrigation performance of sprinkler uniform motion
Water distribution
The water distribution of the sprinkler motion along the y-axis and in two directions (along the y- and x-axes) are shown in Figures 8 and 9, respectively. The nozzle diameter was 10.5 × 4.5 mm, and the sprinkler speed was 35 m h−1. The average application depth and CU value in Figure 8 were 8.1 mm and 53.3%, respectively, with low water distribution. The average application depth and CU value in Figure 9 were 16.4 mm and 81.3%, respectively, and the water distribution was similar to that in Figure 8. Therefore, the sprinkler combined irrigation of the two-directional motion can significantly improve sprinkler irrigation uniformity.

Water distribution of the sprinkler motion along the y-axis.

Water distribution of the sprinkler motion along the y- and x-axes.
Irrigation performance
The speed of sprinkler motion was 15 m h−1, and it had eight types of shifting speeds (parameter interval, 5 m h−1). The relationship between the speed of sprinkler motion and the application depth of each nozzle diameter was a smooth curve (Figure 10). The curve was described using a power function, as shown in equation (14). The curve had a good fitting because the fit coefficients tended to be 1 (Table 1). The average application depth produced by each nozzle gradually decreased as the speed of sprinkler motion increased. Moreover, sprinkler motion speed and the average application depth corresponding to each nozzle were different. The difference between the maximum and minimum was 1.3–4.7 mm (maximum ratio of the difference, approximately 10%). The maximum and minimum average application depths were 44.3 and 11.3 mm, respectively, at 15–50 m h−1 of the sprinkler motion. The flow rate of sprinkler was constant when a nozzle diameter was set due to increased sprinkler motion speed (Figure 10), thus shortening the time for the sprinkler to move 2R distance in the x- and y-axes and reducing the average application depth in the square area. The average application depth differed when the same flow rate was used for irrigation due to the progressive relationship between the nozzle diameter and the initial speed of water jet, range of the nozzle, and the irrigation area of the square area (one by one). Although it is difficult to measure the pros and cons of nozzles via a single analysis of the average parameter interval, it can be combined with the irrigation schedule to select the appropriate sprinkler motion speed for irrigation based on the water demand of a crop.


The relationship between sprinkler motion speed and average application depth.
Formula coefficient and degree of fit of each nozzle.

The relationship between the sprinkler motion speed and the CU value when different nozzle diameters were selected is shown as a scatter diagram in Figure 11. The highest CU value of the nozzle at each speed of the sprinkler motion was at nozzle diameter of 10.5 × 4.5 mm followed by 10.5 × 5.0 mm. The lowest CU value of the nozzle was at nozzle diameter of 11.5 × 5.0 mm. The CU values decreased as the sprinkler motion speed increased. However, the downward trend was not significant. In this study, sprinkler motion speed, nozzle diameter, and two-directional motion combination significantly affected the CU value. The initial speed of the water jet was different due to the different nozzle diameters. Water distribution was also significantly different, as reflected in the water jet of the middle and end sections. Model calculation showed that water distribution was best at nozzle diameter of 10.5 × 4.5 mm with a CU value of about 81.5%.

The relationship between the sprinkler motion speed and the CU value in each nozzle.
In summary, the CU value was most effective at the nozzle diameter of 10.5 × 4.5 mm. The average depth and CU value gradually decreased as the sprinkler motion speed increased. The following are studied on the change of sprinkler motion speed during sprinkler irrigation process to improve the CU value.
Irrigation performance of a sprinkler with speed combinations
Calculation model of the speed combinations
In speed combination motion, different uniform speeds are selected to move a specified distance and perform one axis 2R distance. Herein, two different speeds were chosen. The combination distribution of sprinkler motion speed was also the same and was 45° symmetrical on the x- and y-axes. Similarly, using the sprinkler motion on the y-axis as an example, the two motion speeds were vC (m h−1), and the motion unit nC distances were ΔlC (m) in equations (15) and (16). N and ΔL (m) represent the total number of units in equation (17) and the distance from the starting point to the j unit in equation (18), respectively. hn (mm) and





Irrigation performance
Large amount of data was converted as the motion moved from the 2R position to point 0. The CU values were greater when the second speed was greater than the first speed. Therefore, the following studies were conducted.
The distance that sprinkler moved on the x- and y-axes was taken as 48 m (2R) since the maximum range of sprinkler with a nozzle diameter of 10.5 × 4.5 mm was 23.5 m based on the model calculations. The 48 m was divided into eight parts (6 m each) based on sprinkler speed of 15–50 m h−1 (each change of 5 m h−1 was considered as one part). The symbol 15 and 20 represents the speed combination, and the numbered sequences show the first and second speeds (15 and 20 m h−1, respectively (Figures 12 and 13)). The symbol <18,30> represents the motion distance of the speed combination specifics. The number sequence shows the first and second distances (18and 30 m, respectively). Other speeds and distances are expressed as described above.

The depth under the sprinkler motion speed and the corresponding motion distance.

The CU value under the sprinkler speed and the corresponding motion distance.
The average application depth of the combination mode of the two speeds was between 11 and 38 mm (Figure 12). The average application depth gradually increased and decreased with the first distance and the second speed increasing at the same first speed, respectively, when each graph was analyzed separately. The highest values appeared at <42,6>. Each graph was analyzed using the same first distance. The difference between the two speeds, with the first speed increasing, gradually decreased the average application depth. In this study, many similar average application depths at all levels were calculated using several speed combinations to select the optimal CU value to meet the physiological and ecological water requirements of various crops and their growth periods.
The average application depth of the combination mode of the two speeds was between 81% and 86% (Figure 13). Each graph was analyzed separately at the same first and second speeds while increasing the first distance. The CU value first increased, then decreased, reaching the highest value of 30–42 m at the first distance. The CU value increased at the same first speed and the first distance, while the second speed increased (CU value was higher when the difference between the two speeds was high). Each graph was analyzed under the same first distance and two differences in speed while increasing the first speed. The overall CU value slightly decreased, and the difference between the highest and lowest values was 0.7%–1.4%. The CU value was most effective when the speed combination was 15–50 m h−1, and the motion distances were <30,18> and <36,12>.
Therefore, operating sprinkler irrigation in the two-speed combination motion of sprinklers has some advantages, providing a demonstration basis for the operation of sprinkler irrigation of the later multi-speed combination motion.
Results and discussion
It is necessary to select the appropriate level of the average application depth based on crop water demand and screen out the optimal model of sprinkler motion and the CU value when the two-directional motion combination is used in sprinkler irrigation. This research provides a technical basis for the sprinkler motion to achieve sprinkler irrigation of unmanned driving and intelligent obstacle avoidance.
Herein, a CU value of 10.5 × 4.5 mm was the most effective among the five nozzle diameters of the 30PY2 sprinkler. The speed combination was more effective than a uniform speed based on the CU value of the mode of sprinkle motion. The average application depth of the uniform speed motion of sprinklers was fully controllable, and the CU value was about 81.5%. The CU value of the speed combination motion significantly changed, but it was higher than the uniform speed motion, with the highest difference of 4%. However, research on the combination mode of motion of the sprinkler is still in the initial stage, and thus further research on the diversity of the speed combination is necessary.
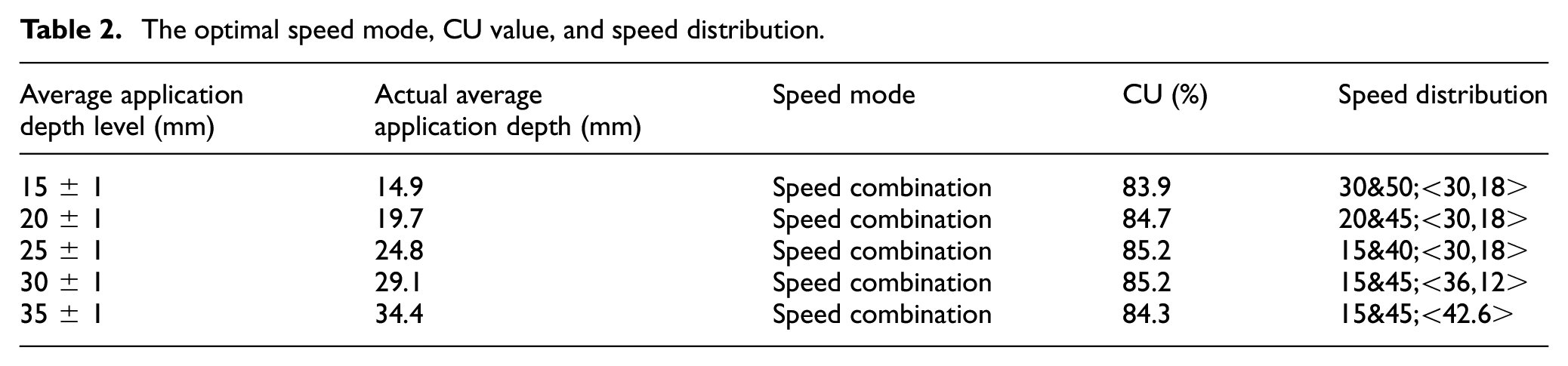
Herein, the average application depth was 11–35 mm, which was divided into five grades (15, 20, 25, 30, and 35 mm) (deviation, ±1 mm). Each level of the optimal speed mode, CU value, and speed distribution based on the motion state of the sprinkler on the y-axis is shown in Table 2.
The optimal speed mode, CU value, and speed distribution.
Conclusions
In this study, the irrigation performance parameters of the 30PY2 impact sprinkler in the Hard Hose Traveler along two-directional combined motion were studied. The calculated and test values of the model of the average application depth were compared. Besides, the accuracy of the model to calculate irrigation uniformity was verified. As a result, the effect of nozzle diameter, speed of sprinkler motion, and mode of motion of the speed combination on irrigation performance were discussed. The optimal CU value of the average application depth and corresponding combination of speeds at all levels were obtained. Unmanned driving and intelligence obstacle avoidance irrigation and variable irrigation were realized in the later stage in the conclusion section (as described below), providing some technical basis.
A model for calculating the CU value was established in the square test area under two-directional motion of impact sprinkler. The model could improve the efficiency of a single Hard Hose Traveler in small and medium-sized irregular fields. The error between the calculated and experimental values of the average application depth was 7.4% when the sprinkler moved at a constant speed. The CU value of the nozzle diameter 10.5 × 4.5 mm was the most effective (about 81.6%). The average application depth and the CU value gradually decreased as the uniform speed of sprinkler motion increased. The speed and two-directional motion combination had an interactive effect on the CU value. A regular pattern of the average application depth was obtained with uniform changes in sprinkler motion.
The speed and distance of the sprinkler motion at a constant speed can affect the average application depth and the CU value. The CU value was most effective when the speed combination was 15 and 50 m h−1, and the motion distance was <30,18> and <36,12>.
The speed combination was better than irrigating at a uniform speed based on the CU values for the mode of sprinkle motion. Different average application depths can be obtained using different combinations of sprinkler speeds, which is suitable for selecting the appropriate mode of sprinkler motion based on the crop water requirement, thereby realizing variable irrigation.
However, the effect of other factors on the CU value will be studied in the later literature due to the limited layout of the article.
Footnotes
Appendix
Acknowledgements
We would like to thank the editor and the anonymous reviewers for their helpful suggestions and comments.
Handling Editor: Chenhui Liang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was funded by Postgraduate Research & Practice Innovation Program of Jiangsu Province (KYCX19_1602) and the National Natural Science Foundation of China (51939005, 51809119).