
Abstract
This paper introduces the development of a self-propelled hard hose traveler to accelerate the transition of the traditional JP50-180 hard hose traveler toward becoming an irrigation robot and enhancing its applicability in farmland. The uniformity model of linear motion water distribution is established by utilizing the total frequency of application during the sprinkler motion and the radial application depth once during the fixed sprinkler rotation. The average application depth deviation between the tested and calculated values is 7.4%. The effect of combined irrigation with sprinkler motion is superior to that of motion irrigation with a single sprinkler. The average application depth decreases as the motion speed increases while the water distribution uniformity (CU value) remains constant. The average application depth decreases as the path spacing increases. In contrast, the CU value first increases and then decreases. The highest CU value is approximately 94%, with the optimal path spacing being 1.5R and the optimal combinations of sprinkler rotation angles α, β, and γ being 0°, 90°, and 90°, or 90°, 90°, and, 0°, or 0°, 180°, and 0°, respectively depending on the case. The above indicators are significant for planning the irrigation application of a self-propelled hard hose traveler.
Keywords
Introduction
With the intensifying issues of global population aging and shortage of agricultural labor, agricultural robots are entering a period of rapid development. 1 Extensive research has already been conducted in various fields, including agriculture,2–5 orchards,6–9 protected agriculture,10–13 and livestock and poultry farming.14,15 Water-saving irrigation equipment also evolves toward intelligence and autonomous mobility. 16 The traditional hard hose traveler is continuous-moving water-saving irrigation equipment driven by a water turbine, suitable for medium-sized farmland in the plains of China.17,18 However, its applicability still needs improvement. Therefore, this paper designs a self-propelled hard hose traveler using an electric tracked vehicle to carry the sprinkler and drag out the polyethylene tube, achieving continuous irrigation. This design addresses irrigation issues in sloping fields and fields with poor regularity through its off-road climbing and maneuvering capabilities. Furthermore, the design also provides the necessary hardware foundation for water-saving irrigation equipment to evolve into sprinkler irrigation robots.
The hydraulic parameters, such as the sprinkler motion speed, the path spacing, and the flow rate, are crucial factors influencing the application depth of the sprinkler irrigation system.19,20 The average application depth is somewhat equivalent to the irrigation quota in the irrigation schedule. This irrigation quota determines whether the field moisture meets the crop water requirements.21,22 Therefore, this paper designs the hydraulic parameters for the self-propelled hard hose traveler using traditional hard hose traveler and irrigation scheduling.
Apart from the application depth, the CU value is also a critical indicator 23 for evaluating the hydraulic performance of motion sprinkler irrigation 24 and combined sprinkler irrigation. 25 Experiments may encounter irregular factors due to the influence of operating conditions, 26 as well as natural environmental factors27,28 (such as temperature and humidity). Researchers have explored the relationship between operating conditions, the CU value, and the average application depth by establishing calculation models in such cases. The existing calculation models simplify radial water distribution lines into regular shapes, such as triangles or ellipses, 29 using time as the dependent variable. Then, this formula is integrated to calculate the CU value. However, simplifying radial lines results in poor accuracy. 30 Ge et al. 17 represented the radial water distribution lines using cubic spline interpolation, Lagrange interpolation, and polynomial fitting. The author compared these simplification methods. The CU values were calculated and validated using the same calculation model. The results indicate that the cubic spline curve and polynomial fitting methods were the best, with a maximum deviation of less than 10%. Therefore, this paper represents the radial water distribution lines based on the cubic spline interpolation curve and derives the total application depth at each measurement point through the calculation model. Compared to previous studies,17,29,30 the calculation model established in this paper determines the total application depth at each measurement point based on the total application frequency during the sprinkler motion and the radial application depth once during the fixed sprinkler rotation. This model refines the motion process of each irrigation event and sprinkler rotation, aiding in the comprehensive analysis throughout the paper of the influence of various hydraulic parameters, such as sprinkler arrangement, sprinkler rotation angle, and path spacing, on hydraulic performance.
The traditional hard hose traveler primarily relies on a single sprinkler layout, with an average CU value of only 62% for a single sprinkler in operation, indicating poor performance.31,32 Ge et al. 33 conducted research on combined irrigation with this sprinkler motion. The author analyzed multiple sprinkler rotation angles and path spacings through a calculation model using the 50PYC vertical oscillating sprinkler gun. The CU value first increased and then decreased as the path spacing increased. Moreover, the sprinkler rotation angle also significantly impacted the CU value. The results showed that the optimal range for the sprinkler rotation angle is 240°–320°, while the optimal range for the path spacing is 1.5R–1.7R, with a CU value higher than 85%. When Hills et al. 34 operated the lateral-move sprinkler system at speeds ranging from 10% to 100% of its maximum motion speed, the CU value ranged between 92% and 96%. Furthermore, as the motion speed increased, the CU value decreased slightly. In addition, a close correlation was observed between the average application depth and the motion speed. Li et al. 35 found that the CU value of center-pivot sprinkler systems decreases slightly as the motion speed increases. The above literature demonstrates that sprinkler rotation angle, path spacing, and sprinkler motion speed impact the CU value of the self-propelled hard hose traveler. Since the sprinkler adopts a double-sprinkler arrangement and sprays water toward both sides of the path with a sprinkler rotation angle of less than or equal to 180°, this paper will consider the abovementioned factors.
In summary, this paper first designs the hydraulic parameters for the hard hose traveler. Subsequently, a calculation model for the irrigation performance of the sprinkler in straight-line movement is established and experimentally validated. The impact of various factors on the average application depth and CU value is explored to derive the optimal hydraulic parameters and the effective operating area per hour, laying the foundation for the promotion and application of the sprinkler.
Self-propelled hard hose traveler and hydraulic parameters
Composition and working principle of sprinkler
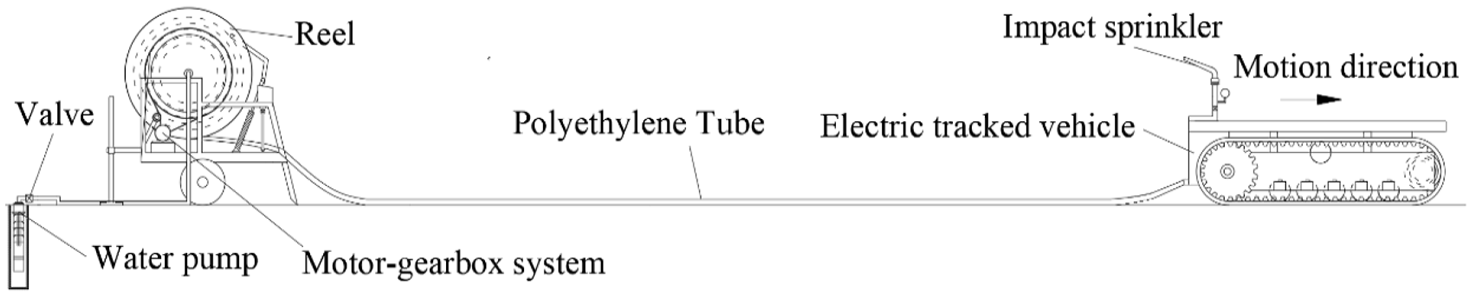
The self-propelled hard hose traveler is designed based on the traditional hard hose traveler, which can be remotely controlled. Its structure mainly comprises a reel truck, polyethylene tube, electric tracked vehicle, sprinkler, and motor-gearbox system, as shown in Figure 1. The reel truck is designed with the maximum recommended flow rate. The electric tracked vehicle mainly comprises a crawler, frame, servomotor, driver, 4G antenna, storage battery, controller, and reduction gearbox, adopting a double-sprinkler arrangement, as shown in Figure 2.
Components and working modes of the self-propelled hard hose traveler.

Electric tracked vehicle and sprinkler arrangement.
The reel truck has the functions of unfolding, storing, and retracting the polyethylene tube. The electric tracked vehicle is characterized by its maneuverability and flexible walking. The vehicle loads sprinklers, mainly changing the irrigation position, unfolding polyethylene tube, and guiding. The motor-gearbox system provides power for retracting the polyethylene tube and replacing the water turbine of the traditional hard hose traveler. During sprinkling irrigation, the reel truck is stored at the water source. The electric-tracked vehicle moves away from the hose reel cart, pulls out the polyethylene tube, and achieves mobile sprinkling irrigation. The polyethylene tube is disconnected from the electric-tracked vehicle at the end of the sprinkling irrigation operation. The motor-gearbox system drives the reel to rotate and retract the polyethylene tube. Then, the electric-tracked vehicle is transferred to the next sprinkling point.
Hydraulic parameters and influencing factors
The irrigation quota is affected by factors such as crops, regions, seasonal irrigation quotas, and irrigation frequency. The average sprinkler application depth should be higher than the irrigation quota. This paper designs the hydraulic parameters of the self-propelled hard hose traveler based on the structure of the traditional hard hose traveler of JP50-180 type produced by Jiangsu Huayuan Water-saving Co., Ltd. Hydraulic parameters mainly include the flow range of the sprinkler, the deployment speed and length of polyethylene tube, and the average application depth. The corresponding values of the traditional hard hose traveler of JP50-180 type are 5.5–19.7 m3 h−1, 6–30 m h−1, 180 m, and 6–44 mm, respectively. Therefore, the average application depth of the self-propelled hard hose traveler is set as 6–44 mm to meet the irrigation quota.
The application depth and CU value are related to the sprinkler flow rate, layout, type, rotation angle, motion speed, path spacing, and nozzle size. The remaining factors remain unchanged to adjust the application depth of the sprinkler. The sprinkler motion speed is estimated via the average application depth. The traditional hard hose traveler is equipped with a single 40PY2 impact sprinkler and a maximum flow rate of 19.7 m3 h−1. Therefore, the flow rate of the single sprinkler of the self-propelled hard hose traveler is 9.85 m3 h−1. A 30PY2 impact sprinkler with a nozzle diameter of 10.5 × 4.5 mm is selected from the national standard for rotating sprinklers GB/T 22999-2008. 36 Its working pressure is approximately 450 kPa, an elevation angle of 25°, and a range of 25 m.
During the sprinkler’s movement, if the measuring points are still within the circle with the sprinkler as the center and the range as the radius, it is called unfinished watering (except for the measuring points that have not been watered). Otherwise, it is called finished watering.
In Figure 3, the points represent impact sprinklers, and A, B, and C are three irrigated areas. An impact sprinkler moves along the motion path while rotating and spraying at a 180° angle. The ratio of travel distance to spray radius during the rotation cycle of the impact sprinkler is relatively small; therefore, the impact sprinkler can be considered stationary. When the sprinkler is at point 2, the range can radiate to points 1 and 3. When the sprinkler head is at point 3, the range can radiate to points 2 and 4. The application depth from point 1 to point 2 in area B is the same as from point 2 to point 3 in area A. The application depth from the sprinkler at point 2 to point 3 in area C is the same as that from point 3 to point 4 in area B. Theoretically, the application depth from the sprinkler at point 1 to point 2 is in area A, and each measuring point is fully watered. Therefore, the relationship between the average application depth and the motion speed of the sprinkler can be obtained, as shown in equation (1).


where H1 is the average application depth when designing hydraulic parameters, mm; v is the motion speed of the sprinkler, m h−1; R is the impact sprinkler range, m; Q is the maximum flow rate of the reel truck, m3 h−1; n1 is the number of sprinklers; S is the motion distance of the sprinkler, m; t1 is the motion time of the sprinkler, h.

Partially irrigated areas in sprinkler irrigation.
An inverse proportional function with a coefficient of 398.4 can be obtained based on the above calculations; the fitting coefficient of the function is 1. The sprinkler motion speed is temporarily set at 10–50 m h−1, with an accuracy of 1 m h−1. This paper takes the path spacing, sprinkler rotation angle, and sprinkler motion speed as influencing factors to investigate the average application depth and CU value, as shown in equations (2) and (3). Table 1 shows the values of various factors in this paper.


where h is the application depth at a measuring point, mm; LC is the path spacing, m; α, β, and γ are combined as the sprinkler rotation angles, and the sum of the three is 180°, °; the CU value is the uniformity of water distribution, %.
Values of influencing factors.

Uniformity model of linear motion water distribution
A radial water distribution curve based on the cubic spline polynomial
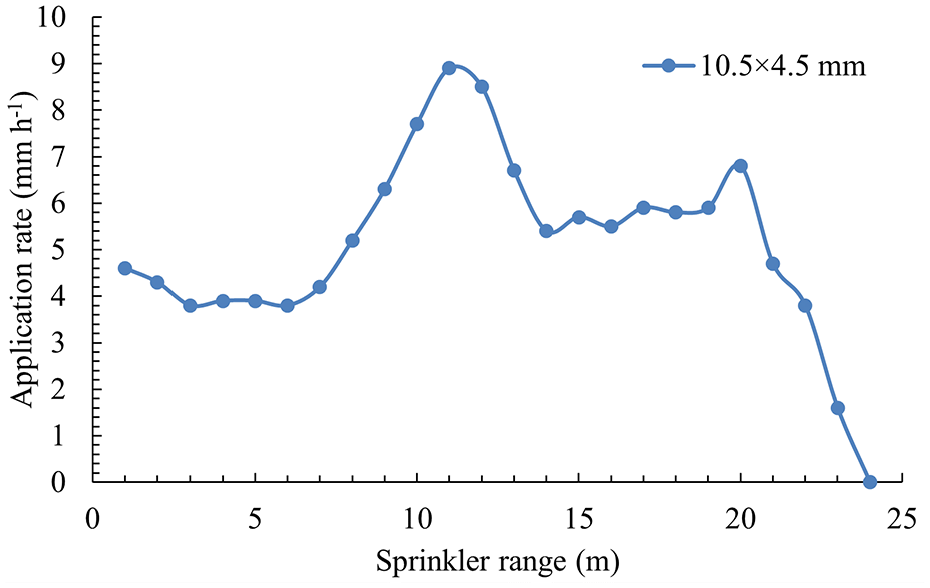
The superposition method of calculating the water volume of the motion sprinkler is based on the radial water distribution of the fixed sprinkling irrigation of the 30PY2 impact sprinkler in the laboratory. Under the same flow, the impact sprinkler with 180° rotation for 0.5 h receives the water the same number of times as 360° rotation for 1 h. The water distribution of the nozzle with a diameter of 10.5 × 4.5 mm is shown in Figure 4. According to the verification method of the radial water volume line,36,37 the deviation between the test value and the calculated average application rate is within 4%. The cubic spline function interpolation method is used to calculate the radial water distribution of the sprinkler based on previous research. 38 The water distribution line is shown in equation (4). The rotation period of the fixed sprinkler T (s) was recorded when the sprinkler rotated at 180°. The application frequency K of the fixed sprinkling irrigation is shown in equation (5):


where z is the distance from the sprinkler to the measuring point, m; ρ(z) is the application rate based on the distance between the sprinkler and the measuring point, mm h−1; A i , B i , C i , and D i are the coefficients of equation (4); z i is polynomial nodes with integer values, m.
Water distribution of 30PY2 impact sprinkler.
The method of motion water volume superposition
The method of motion water volume superposition calculates the total application depth at each measuring point by utilizing the total frequency of application during the sprinkler motion and the radial application depth once during the fixed sprinkler rotation. Figure 5 shows the water condition of an M point during the sprinkler motion. Figure 5(a) shows the change process in the nozzle rotation direction. Figure 5(b) shows the relationship between the sprinkler and the position changes of measurement point M. Figure 5(c) shows the relationship between the position of measurement point M, the sprinkler motion, and the rotation angle of the sprinkler. The sprinkler positions are represented as Mstart and Mend, for point M starting and ending the water-receiving process, respectively; the distance between these two positions is L (m). The angles between the sprinkler and the upper and lower sides of the motion path are α and γ, respectively, while the rotation angle of the sprinkler is β. The sum of α, β, and γ angles is 180°.

The water condition of an M point during the sprinkler motion: (a) The change process in the nozzle rotation direction, (b) The relationship between the sprinkler and the position changes of measurement point M, (c) The relationship between the position of measurement point M, the sprinkler motion, and the rotation angle of the sprinkler.
The dynamic process of the sprinkler includes uniform motion along the path and periodic rotation. The motion distance of the sprinkler is divided into multiple units according to the sprinkler rotation period. Two dynamic processes are independent during the calculation process. The distance between point M and the sprinkler is calculated when the sprinkler is at each unit. The result was factored into equation (4) to obtain the application depth. Once the sprinkler motion is finished, the total application depth of the M point is calculated as the sum of the water received in each unit.
Three hypotheses are proposed based on the information above:
(1) The sprinkler jet morphology and the water distribution in the range of water application are the same during each rotation period.
(2) The change in distance between the point measured and the sprinkler should be ignored during each rotation period.
(3) The influence of wind speed, direction, temperature, and humidity on water distribution under natural conditions should be neglected.
The projection distance l (m) between the sprinkler position and the measuring point on the motion path can be determined once the M point is watered, as shown in equation (6):

where x m is the distance from measuring point M to the motion path, m.
Next, the rotation period t2 (s) of the motion sprinkler and the radial motion distance Δl (m) within the period are determined, as shown in equations (7) and (8), respectively:


Then, the radial motion length L of the sprinkler is determined. Assuming that the measuring point M moves radially while the sprinkler sprays in a fan-shaped area with an angle of β, point M is only watered within the fan-shaped area. Therefore, within the fan-shaped boundary, the length of the line passing through point M and parallel to the motion path is the motion length L of the sprinkler, as shown in Figure 5(c) and equation (9):

Next, the positional relationship between the sprinkler and measuring point M is determined. Parameter L is divided into n units, as shown in equation (10). Each unit is labeled as Δl with j∈ (0, n), and equation (11) is derived to calculate the distance ΔL (m) from the starting point Mstart to the unit j. The distance dj (m) from unit j to point M is shown in equation (12):



Next, the application depth h (d j ) (mm) of point M in a single rotation period of the sprinkler and the application depth h n (mm) in the n periods of rotation are calculated using equations (13) and (14), respectively:


The average application depth and the uniformity of water distribution
According to the national standards GB/T 27612.3-2011 39 and GB/T 21400.1-2008, 40 the measuring points should be arranged in a radial or grid pattern. The average application depth H is shown in equation (15). The uniformity of water distribution can be calculated through the above model, 41 as shown in equation (16):


where H is the average application depth, mm; m1 is the serial number of the measurement point; and N is the total number of measurement points.
Validating the average application depth
In this study, the straight-line motion of the sprinklers and a single row of the measuring points completely exposed to water were adopted to validate the accuracy of the application depth of the calculated and test values. The test was conducted in the Lizhong Agricultural Machinery Cooperative in Huantai, Zibo City, Shandong Province, China. The radial line of the measuring point is perpendicular to the motion path, and the buckets are arranged in a 1.5 × 1.5 m form, as shown in Figure 6. The sprinkler was accelerated to the required speed and moved through mechanical dragging. The average value of application depth was recorded after completing the test, obtaining a lateral line of the measuring point completely exposed to water. A JP50-180 hard hose traveler, a 30PY2 impact sprinkler, and a 10.5 × 4.5 mm nozzle diameter were selected in the test. The sprinkler moves at a speed of 35 m h−1 with a flow rate of 9.96 m3 h−1, α = 0°, β = 180°, and γ = 0°. The installation height of the sprinkler is 1.3 m. The caliber of the plastic bucket was 200 mm, and the height was 170 mm. The wind speed ranged from 1.23 to 2.55 m s−1. The relative temperature of air was maintained at 12.3°C, and the relative humidity of air was maintained at 24.82%. The test values are compared with the calculated values as follows.

Bucket layout and sprinkler irrigation test site diagram.
Figure 7 shows the curves of calculated and test values of application depth for the motion sprinkler, with average application depths of 10.46 and 11.28 mm, respectively. The deviation rate between the two values is 7.4%. The test value is higher than the calculated value. The minimum deviation occurs at 10.5 m, with a deviation rate of 0%. In comparison, the maximum deviation occurs at 15 m, with a deviation rate of 20.9%. The overall trend of the test application depth curve can support the trend of the calculated value curve, indicating that the calculated value is accurate. Nevertheless, some deviations were present. The accuracy may be caused by mode and test calculations, the evaporative drift of water, and the deviation rate during the sprinkling process. Overall, the test value can validate the accuracy and reliability of the calculation method.
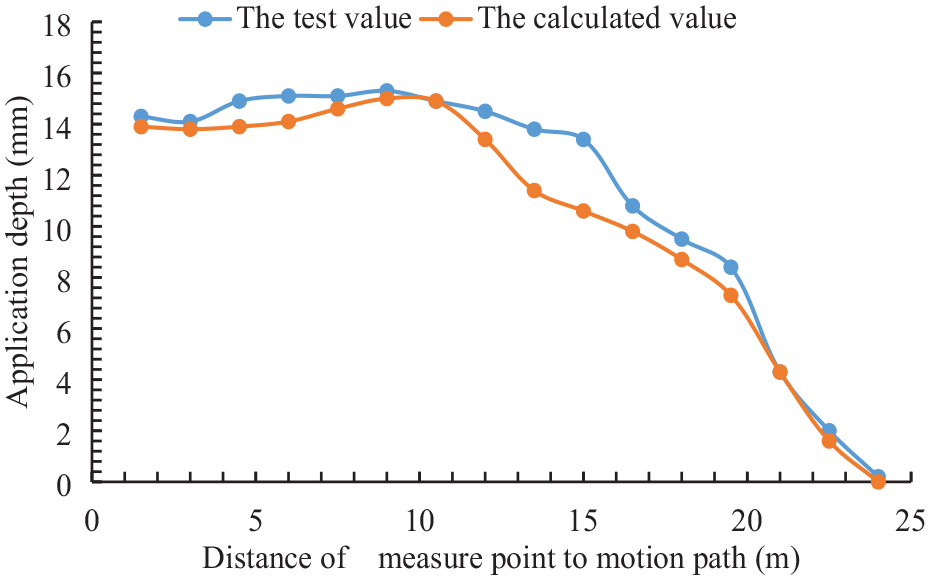
Application depth curves of the calculated and test values.
Irrigation performance of the sprinkler in straight-line movement
Motion irrigation with a single sprinkler
Sprinkler motion speed
As illustrated in Table 2, when the sprinkler rotation angles are set to α = 0°, β = 180°, and γ = 0°, the average application depth decreases in a power function form as the motion speed increases, as indicated by equation (17). The fitting coefficient for this relationship is 1. Figure 8 presents the application depth at each measurement point for various speeds. At different speeds, the application depth at each measurement point also varies in a power function form:

The average application depth and CU values at various motion speeds.


Average application depth for sprinklers at various motion speeds.
In Table 2, the CU value exhibits slight oscillatory changes as the motion speed increases but generally remains within the 62.7%–63.0% range. The fluctuation range of the CU value at 0.3% is relatively narrow and insufficient to demonstrate the impact of motion speed on water distribution. Additionally, fluctuations in the CU value may also be caused by variations in Δl and the value taken after the decimal point. Therefore, the impact of sprinkler motion speed on the CU value can be neglected.
Sprinkler rotation angle
The application depths at various measurement points for different sprinkler rotation angles and the sprinkler motion speed of 35 m h−1 are shown in Figure 9. The average application depths and CU values are presented in Table 3. In Table 3, the combinations of α, β, and γ angles have been numbered, and the application depth generally remains within the range of 10.4–11.0 mm. Relative deviations in the average application depth can be observed due to value selection and model calculation deviations.
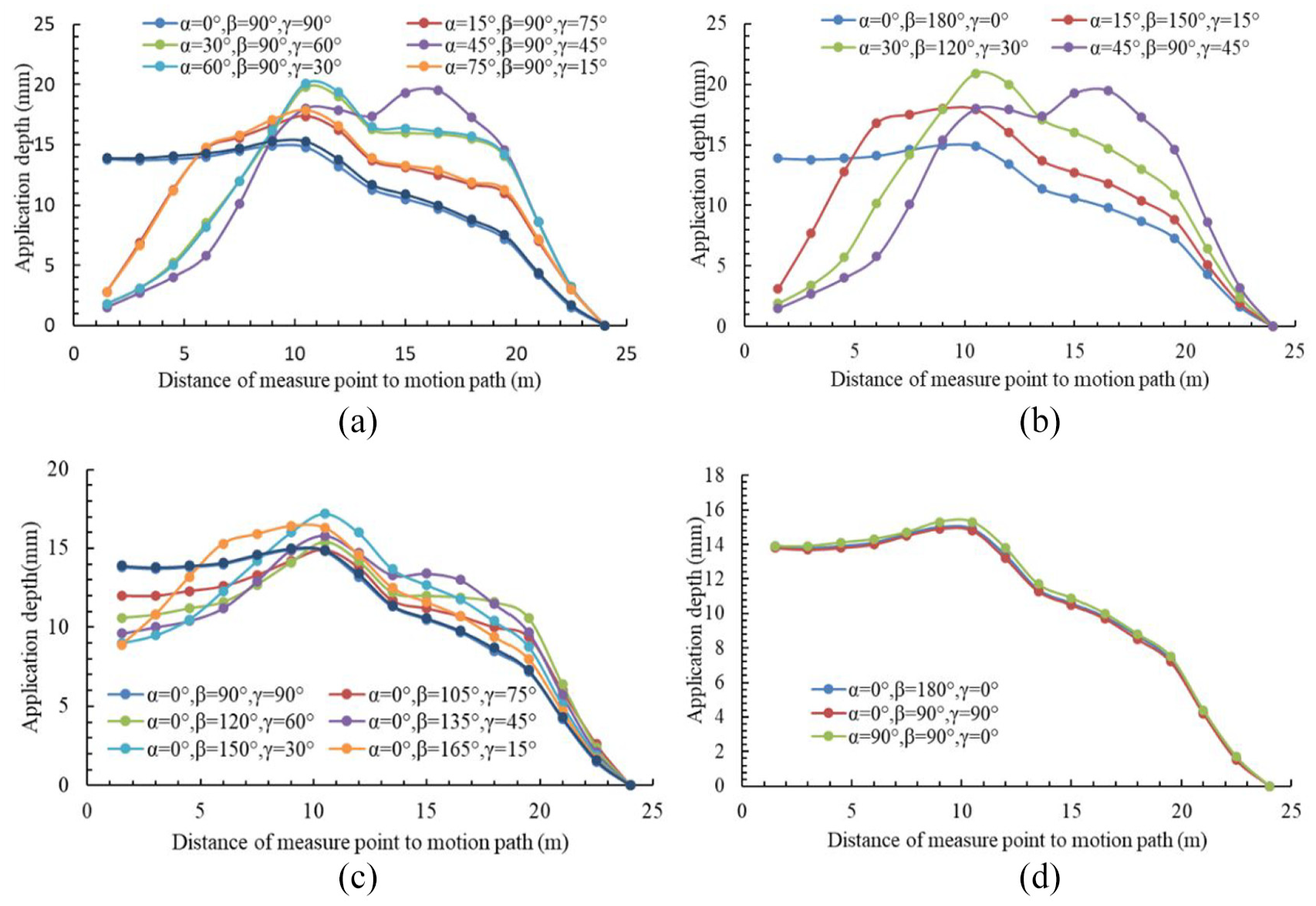
The application depth lines for different sprinkler rotation angles: (a) β angle remains at 90°, (b) the centerline of β angle is perpendicular to the motion path, (c) α angle is constantly at 0° while β angle gradually increases, and (d) comparison of β angle at 90° with that at 180° for α or γ either being 0°.
The average application depth and CU value for different sprinkler rotation angles.

In Figure 9(a), when β is 90°, each application depth lines for each α angle ranging from 0° to 90° largely coincide with those for γ angles ranging from 0° to 90°, with similar CU values. When α or γ angle is 90°, the application depth line remains flat until it reaches 10 m, after which it starts to decline. When either α or γ angle is 90°, the application depth volume line remains straight and exhibits a downward trend at 10 m. The values at both ends of other application depth volume lines are relatively low, while those in the middle are high.
Different sprinkler rotation angles are compared next. When α increases from 0° to 45°, the application depth is lower at the 1–9 m range and higher at the 10–24 m range. Conversely, the opposite pattern is observed when α decreases from 45° to 0°. In Table 3, as α increases, the CU value first decreases and then increases, with the lowest and highest values being approximately 40.96% and 63%, respectively.
In Figure 9(b), angles α and γ are the same, and β is higher than or equal to 90°. As either angle α or γ increases, the starting value of the application depth line decreases. In contrast, the intermediate values increase, causing the irrigation water to accumulate toward the rear. In Table 3, as angle α or γ increases, the CU value decreases, with the lowest and highest values being 40.96% and 62.90%, respectively.
In Figure 9(c), α = 0°, β ≥ 90°, and γ ≤ 90°. The application depth lines at β = 90° and 180° are taken as references. The higher the β angle within the range of 90°–135°, the lower the starting value of the application depth line, and the more pronounced the trend of being lower on both sides and higher in the middle. The higher the β angle within the range of 135°–180°, the higher the starting value of the application depth line, and the more pronounced the trend of smoothly decreasing. In Table 3, the CU value is highest at β = 120°, with a value of 72.99%. When β = 90° or 180°, the CU value is lowest, with a value below 63%.
In Figure 9(d), the application depth lines for the three sprinkler rotation angles almost coincide, and the CU values in Table 3 are approximately the same. The highest CU value (73.0%) is achieved when α is 0°, β is 120°, and γ is 60°. Therefore, the following discussion will focus on the application depth and CU value by adjusting the two path spacing.
Combined irrigation with sprinkler motion
When arranged at a path spacing of 2.0 R, the sprinkling effect of the sprinklers is identical to the effect when they are not combined. Therefore, further discussion on this aspect is omitted below.
Sprinkler motion speed
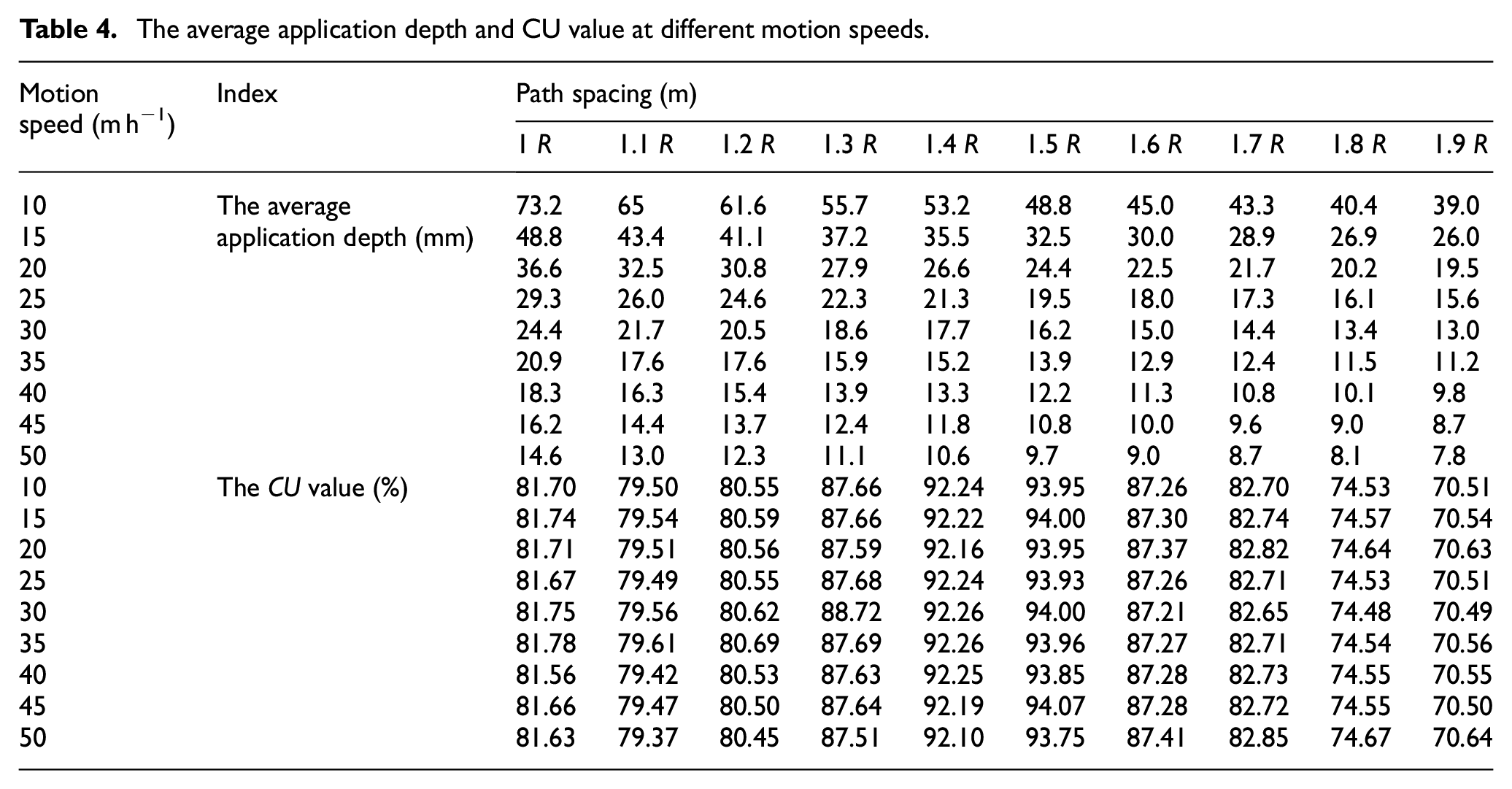
Table 4 shows the average application depth and CU values for different motion speeds, with α at 0°, β at 180°, and γ at 0°. For the same path spacing, the average application depth decreases continuously as the motion speed increases while the CU value remains constant. As the path spacing increases, the average application depth decreases continuously for the same motion speed. In contrast, the CU value increases and decreases. The optimal path spacing in this paper is 1.5 R, with the CU value maintained at approximately 94%. The relationship between the motion speed and the average application depth is shown in equation (18):

The average application depth and CU value at different motion speeds.
Sprinkler rotation angle
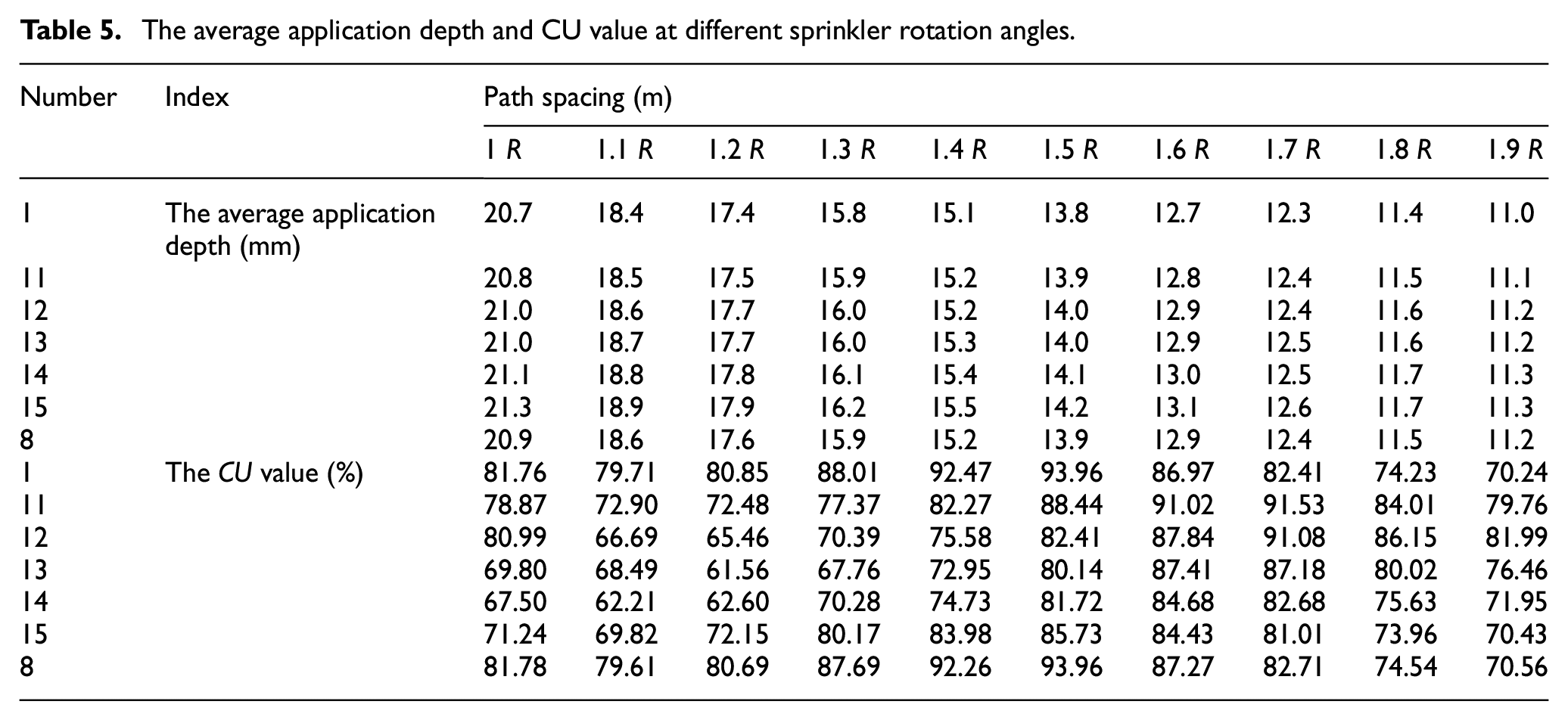
Table 5 shows the average application depth and CU values for different sprinkler rotation angles, with the sprinkler motion speed at 35 m h−1. Different sprinkler rotation angles are marked in Table 3. At the same path spacing, the deviation range of the average application depth is within 0.6 mm. The CU value first decreases and then increases. The average application depth gradually decreases with an increase in path spacing. The basic trend of the CU value is to increase first and then decrease. The average application depth and CU value for numbers 1 and 8 are almost identical. In this paper, the highest CU value is approximately 94%, with the optimal combined spacing being 1.5 R. The optimal angles for α, β, and γ are either 0°, 90°, and 90°, 90°, 90°, and 0°, or 0°, 180°, and 0°.
The average application depth and CU value at different sprinkler rotation angles.
Results and discussion
Hydraulic parameter matching and performance analysis
The optimal CU values for motion irrigation with a single sprinkler and combined irrigation with sprinkler motion are approximately 70% and 94%, respectively. Figure 10 demonstrates the irrigation effect with a sprinkler motion speed of 35 m h−1 and the sprinkler rotation angles α, β, and γ of 0°, 180°, and 0°, respectively. Additionally, Figure 11 shows the irrigation effect with a sprinkler motion speed of 35 m h−1 and a path spacing of 1.5 R. At the same motion speed, the application depth pattern in Figure 11 is significantly better than that in Figure 10. Combined irrigation with sprinkler motion can be applied to elongated field plots, whereas motion irrigation with a single sprinkle suits irregularly shaped field plots. If the average application depth exceeds the scope of this study, its value can be calculated using equations (17) and (18). Therefore, the highest CU value obtained in this paper is approximately 94%, with the optimal combined spacing being 1.5 R. The optimal angles for α, β, and γ are the following combinations: 0°, 90°, and 90°; 90°, 90°, and 0°; 0°, 180°, and 0°, respectively.

The irrigation effect with a sprinkler motion speed of 35 m h−1.

The irrigation effect with a sprinkler motion speed of 35 m h−1 and a path spacing of 1.5 R.
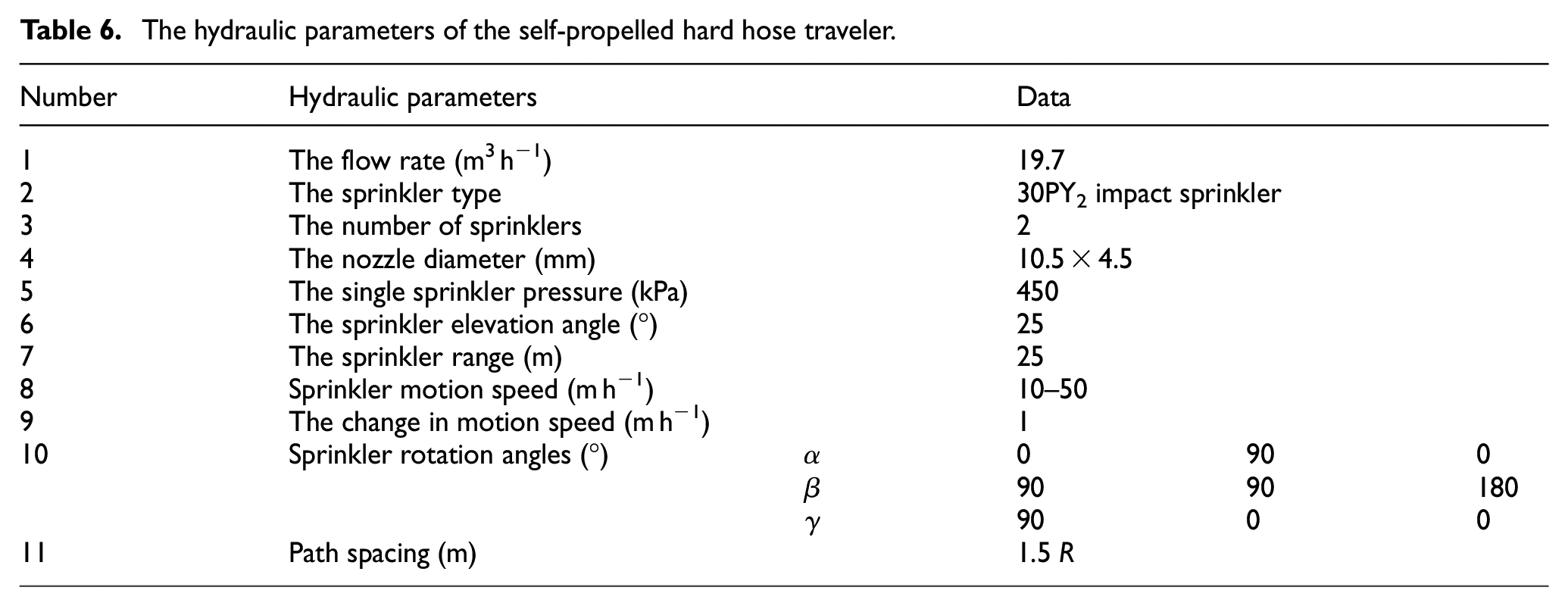
The hydraulic parameters of the self-propelled hard hose traveler are listed in Table 6. These parameters serve as important guidelines for field sprinkler irrigation operations.
The hydraulic parameters of the self-propelled hard hose traveler.
Effective operating area per hour
In addition to the average application depth and CU value, this paper also sets the effective operating area per hour D (m2 h−1) as an evaluation index, specifically as shown in equation (19). The effective operating area per hour refers to the area that can be irrigated per hour by a self-propelled hard hose traveler during a single deployment of the polyethylene tube at the optimal path spacing. The deployment operation time refers to the duration for a self-propelled hard hose traveler to fully deploy the polyethylene tube in a single continuous movement at a specific speed. The above indicators are characterized by high guiding significance for planning the irrigation application of self-propelled hard-hose travelers. The detailed data is shown in Table 7.

The effective operating area per hour of a self-propelled hard hose traveler.

Conclusions
The JP50-180 self-propelled hard hose traveler employs a double-sprinkler arrangement for linear irrigation operations, utilizing 30PY2 impact sprinklers with a nozzle diameter of 10.5 × 4.5 mm. The uniformity of water distribution was analyzed by combining computational modeling and test validation, leading to the determination of optimal hydraulic parameters. These findings have laid a solid foundation for promoting and applying this sprinkler. The specific conclusions of this paper are as follows:
(1) A self-propelled hard hose traveler was designed to elucidate the design principle for the sprinkler motion speed range from 10 to 50 m h−1. A calculation model for the uniformity of linear motion water distribution was established. Test validation showed that the average application depth deviation between the test and calculated values was 7.4%. A power equation relationship was presented between the sprinkler motion speed and the average application depth rate.
(2) The average application depth decreases with increased motion speed during motion irrigation with a single sprinkler. At the same time, the CU value remains approximately constant. The average application depth for different sprinkler rotation angles stays within the range of 10.4–11.0 mm. The CU value is optimal when α is 0°, with a value of roughly 70%.
(3) The average application depth decreases as the motion speed increases during the combined irrigation with sprinkler motion and under the same path spacing. In contrast, The CU value remains approximately constant. As the path spacing increases, the average application depth decreases at the same motion speed, and the CU value first increases and then decreases. The effect of combined irrigation with sprinkler motion is superior to that of motion irrigation with a single sprinkler. In this paper, the highest CU value is approximately 94%, with the optimal path spacing being 1.5R and the optimal sprinkler rotation angles α, β, and γ being one of the following combinations: 0°, 90°, and 90°; 90°, 90°, and 0°; or 0°, 180°, and 0°. The effective operating area per hour is provided for each motion speed.
Currently, this paper only studies the irrigation performance of the double-sprinkler arrangement for self-propelled hose reel sprinklers, without exploring various types of sprinkler arrangements. In the future, comprehensive performance research on this sprinkler system will be conducted, incorporating aspects such as irrigation performance, energy consumption, and operational capabilities, to facilitate its gradual maturity.
Footnotes
Acknowledgements
Handling Editor: Sharmili Pandian
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by the following grants: Natural Science Foundation of the Jiangsu Higher Education Institutions of China (24KJB210020); the Key Laboratory of Fluid and Power Machinery (Xihua University), Ministry of Education (LTDL-2024015); Suzhou Vocational University (202305000003, KY202304003).