
Abstract
The challenge of dynamic traffic demand in mobile networks is tackled by moving cells based on unmanned aerial vehicles. Considering the tremendous potential of unmanned aerial vehicles in the future, we propose a new heuristic algorithm for coverage optimization. The proposed algorithm is implemented based on a conditional generative adversarial neural network, with a unique multilayer sum-pooling loss function. To assess the performance of the proposed approach, we compare it with the optimal core-set algorithm and quasi-optimal spiral algorithm. Simulation results show that the proposed approach converges to the quasi-optimal solution with a negligible difference from the global optimum while maintaining a quadratic complexity regardless of the number of users.
Keywords
Introduction
We are rapidly developing a digitized, highly connected, and data-driven society, where most of the business and industrial operations and citizen’s daily routines rely on ubiquitous wireless connectivity. To date, the growing demand for data-hungry mobile applications has forced operators to deploy many additional small cells to accommodate the ever-increasing traffic volumes. However, the gains achieved by the small cells are very sensitive to the mobility pattern of user equipments (UEs). Typically, each city has its own unique social and economic features, which affect the movement of citizens and are considered by mobile operators when deploying small cells in the most effective way. However, there are also various exogenous factors that can temporary change the typical mobility patterns, such as big social events or sports tournaments. The most recent example is the coronavirus disease 2019 (COVID-19) pandemic, which has caused a massive change in the lifestyle and typical mobility patterns of people worldwide due to massive lock-downs and quarantine restrictions. According to the Google Mobility Trends Report, in 2020, the activity of UEs in business areas has dropped by 30%, while the activity in residential areas and parks has increased by 20% and 109%, respectively. 1 Such challenges of abrupt changes in UEs mobility can be effectively solved by moving cells based on unmanned aerial vehicles (UAVs).
Recently, UAV-based wireless networks have been gaining momentum for various applications such as disaster recovery, telemetry, or military communications. 2 However, to be used effectively as an alternative to the cellular mobile network infrastructure, UAVs need to be optimally placed within the target coverage area. There are many proposed solutions for the deployment of UAV-based communication systems, which are covered in recent surveys and research articles.3–9
In this article, we propose a novel solution for optimal coverage design based on a conditional generative adversarial network (cGAN). cGANs belong to the class of generative deep learning models, which are widely adopted for various challenges in fifth-generation (5G) systems.10,11 The basic motivation for using a cGAN is its ability to learn a mapping from input data to a target data distribution. While most of the cGAN research targets image or video generation, there is tremendous potential for cGAN technology in other fields of computer science, such as clustering 12 and intrusion detection. 13 In our contribution, the input data are represented by the UEs distribution in the space, and the target data are represented by the UAVs distribution providing the coverage for UEs. The computation of the optimal UAVs distribution is generally NP-hard 9 and thus, due to the extreme time limitations, not feasible in practice. We believe that through the fast and computationally efficient cGAN application, we can provide a sufficiently accurate approximation of the distributions of UAVs with a reduced time complexity. As the baseline for comparison, we chose two algorithms, which provide either the optimal solution for the UAV-based coverage, termed the core-set algorithm,7,8 or a quasi-optimal solution, termed the spiral algorithm. 9 Note that in the article, we do not target the specific mobility of UAVs but focus our attention on the computation of the UAVs positions for a given snapshot of UEs positions. Nevertheless, an important characteristic is that our algorithm is capable of cooperating with specific algorithms that address the mobility patterns of UAVs (e.g. based on the application of reinforcement learning (RL)) to achieve joint superior performance even in very complex and dynamic scenarios.
The remainder of this article is organized as follows. The Related work section briefly summarizes the recent advancements in UAV coverage optimization. In the System model section, we briefly describe the setup of the system model, basic assumptions, and constraints. In the Proposed approach section, we provide a detailed explanation of the proposed approach and implementation of the cGAN workflow for UAV-based coverage optimization. We split this section into two main subsections covering the training phase and the deployment phase. In the Performance evaluation and discussion section, we simulate and discuss the performance of the proposed approach. Finally, we conclude the article in the Conclusion section.
Related work
The problem of optimal placement of UAVs can be formulated as a mixed integer nonlinear problem, which is generally NP-hard. Thus, we seek approximate solutions based on the application of either differential evolution strategies or machine learning algorithms. Among the former methods, we can appreciate the contribution of Plachy et al., 14 where the authors elaborated on the application of particle swarm optimization (PSO) for UAVs placement, reflecting the instantaneous positions of UEs. Later, the model was extended by including the interference between the base stations and UEs by leveraging the fundamental electricity forces and well-known Coulomb’s law. 15 The optimal path of UAVs that maintains a fixed operational altitude and avoids obstacles was provided by Gonzales et al. 16 The authors suggested the application of the differential evolution concept for a feasible UAV path. The proposed approach is of special relevance to 5G/sixth-generation (6G) communication systems, as it deals with different vision fields of the UAV, which is very common in 6G communication systems supported by UAVs in urban areas. Finally, self-organization of a large fleet of UAVs that follows the specific mobility pattern of UEs was recently proposed in Horváth et al. 17 The authors employ an evolutionary strategy based on the existence of virtual forces and show the superiority of the proposed approach compared to the conventional rule-based methods.
Machine learning algorithms for UAV coverage mainly rely on the application of unsupervised clustering algorithms 9 and RL methods. A promising solution in this domain is the combination of both: deep neural nets (NNs) for large state space approximation and RL rules applied in the discrete-time stochastic process controlled by a Markov decision process (MDP). The advantage of a deep RL-based approach is that it captures the system evolution trajectory and does not require any tuning in the validation phase once the control policy is trained. Pioneering works addressing UAVs coverage optimization based on the application of deep RL were proposed by Wang et al. and Cui et al.18,19 The authors elaborated on the application of a conventional single-agent RL strategy represented by the state-action-reward-state-action (SARSA) algorithm, 18 and the concept was also extended to the multiagent learning scenario, which is of more relevance in the presence of a large fleet of UAVs. 19 Furthermore, Khan and Yau 20 proposed the application of deep RL in determining the optimal UAV trajectory while addressing the limited energy resources of UAVs, and thus, optimization criteria were proposed for when the target was to increase the network lifetime of the UAV fleet. Finally, the work presented in Liu et al. 21 proposes a multiagent greedy-model-based RL approach that accounts for multiple UAVs with different parameters to explore environments in parallel to accelerate training.
In our work, we aim to propose a solution based on a cGAN application that could act as a complementary mechanism to the algorithms given above. As long as there exists high uncertainty related to the UAV position in the fleet, the proposed algorithms can only act weakly, providing substantial performance gaps compared to the maximum theoretical expectations. For example, RL-based algorithms determine the positions of UAVs in fleet indirectly by proposing a specific reward function, which cannot generalize well in complex state spaces. Hence, our proposed approach intends to implement computation of quasi-optimal locations of UAVs in a fleet for a given snapshot of UEs positions in a very short time frame compared to the state-of-the-art algorithms (e.g. the core-set algorithm and spiral algorithm). While both algorithms are characterized by high time complexity that limits their application in the practice, we believe that the low time complexity of our proposed approach is of paramount importance. Thus, our proposed low-complexity approach (computation of the UAVs positions in the fleet) can co-exist and cooperate with the complex deep RL approach (computation of the trajectories of individual UAVs in the fleet) to jointly achieve truly high-precision and low-complexity solutions, targeting the theoretically achievable upper-bound performance of UAV-based communication systems. Note that we only address the former problem (computation of the UAVs positions in the fleet) throughout the article, and the combination of deep RL and our proposed approach is left for our future work.
System model
To perform coverage optimization, we split the investigated area into nonoverlapping segments of size
Throughout the article, we use the following notations. The matrix
Proposed approach
The proposed approach consists of two phases—the training phase of the cGAN and the deployment phase. The training phase encompasses the training of both architectures of the cGAN: generator
Training phase
In this section, we introduce the assumptions considered throughout the article, cGAN model training/characteristics and unique multilayer sum-pooling loss that extends the conventional cGAN loss definition.
Definitions and assumptions
The cGAN
22
uses two deep neural networks simultaneously, that is, the generator
cGAN model
We represent the coverage optimization problem in matrix form. Formally, the generator
The objective function of the generator

The discriminator

Both the discriminator

where
Generator and discriminator
The generator

(a) Detailed block scheme of the training phase of the proposed approach. Note that the training phase is executed offline prior to the practical deployment of UAVs. The UAVs positions generated by the core-set algorithm serve as the template for our approach, determining the structure (weights and biases) of the generator
Multilayer sum-pooling loss
Since UAVs occupy only a few segments in the investigated area, the target matrix
To overcome this problem, we propose a custom multilayer sum-pooling loss function, which is computed according to Algorithm 1. First, the algorithm applies pooling with a filter of size 1 and the same padding, which corresponds to the conventional mean squared error (MSE) calculation between the target template
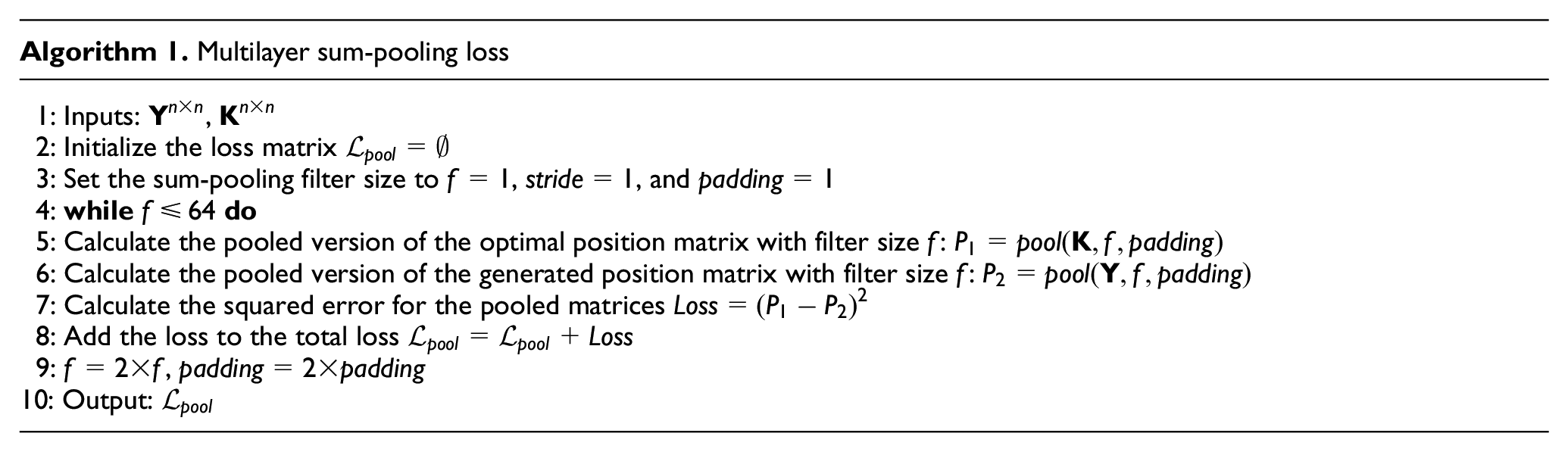
Finally, we formulate the optimization function of the cGAN with the proposed multilayer sum-pooling loss

Deployment phase
The deployment phase is executed online to determine the UAVs positions in real time, respecting the UEs positions in the space. Here, we rely on the application of the reduced cGAN architecture, namely, its trained generator
Correction algorithm for coping with UAV blurring
The conventional application of a cGAN in the area of image processing does not require accurate image precision and often suffers from image blurring. This is not of major concern in the original image processing domain and could be suppressed by advanced image processing techniques. However, in our case, as a side effect, the blurriness of the output results in an increased number of UAVs slightly displaced from each other in the relatively sparse matrix
To tackle this challenge, we employed a correction mechanism to address this issue, which is designed as follows. The proposed correction algorithm takes the sparse matrix

Figure 2 graphically illustrates the issue of UAV blurring (red (thin) circles) and the correction mechanism presented in Algorithm 2 applied on top of the blurred UAVs positions (black bold circles).

Deployment phase: directly predicted UAVs from generator
Performance evaluation and discussion
Simulation model and basic assumptions
The simulation model is defined in the form of a geometric disk coverage problem. 26 The objective of the problem is to cover a set of UEs in a target area by the minimum number of UAVs with a given radius of coverage.
The performance is evaluated from two viewpoints: coverage quality and computational efficiency. As the reference for the coverage quality, we use the core-set algorithm, which provides the optimal solution but is not computationally efficient. The computational efficiency is assessed versus the spiral algorithm, which is the current best practice among quasi-optimal solutions in terms of computational efficiency. 9
Complexity assessment
We focus our analysis on the complexity of the generator
Let us denote the number of UAVs at the output of the generator
Complexity requirements.

Coverage analysis
We define a coverage ratio metric
In Table 2, we can see the averaged simulation results of the proposed algorithm in comparison with the spiral and core-set algorithms. The statistics were averaged over the dataset with a size of 1000 samples (snapshots of various instantaneous UEs positions). We can appreciate the time complexity reduction of the proposed approach across all investigated scenarios. In addition, the number of required UAVs for the proposed approach is in general closer to the optimal core-set solution than to the spiral algorithm solution. Graphical representations of the coverage solutions of the proposed approach, spiral algorithm, and core-set algorithm are shown in Figure 3. As the downside of the proposed approach, we need to note that the coverage is not optimal and there are very few UEs that are not covered (also noted in Table 2). These are mostly located at the edges of the UEs clusters or are outliers not captured by the generator
Time characteristics of each algorithm according to

UE: user equipment; UAV: unmanned aerial vehicle.
For the spiral and core-set algorithms, by definition, the coverage is 100%. In comparison, the proposed approach provides a tremendous time complexity improvement accompanied by only a slight performance degradation in terms of coverage (see also Figure 3). Note that the time complexity requirements for the spiral and core-set algorithms significantly increase with increasing number of UEs, while that of the proposed approach remains almost constant. The best achieved time for a given setting is highlighted in bold.

Computational comparison of the proposed approach, core-set algorithm, and spiral algorithm,
Conclusion
To improve the deployment of moving cells based on UAVs, we have proposed a new computationally efficient algorithm for coverage optimization. The proposed approach is based on a cGAN, with a unique multilayer sum-pooling loss function that allows convergence to the quasi-optimal coverage solution in the presence of high-density clusters of UEs. Simulations have been conducted to assess the performance of the proposed system versus the optimal solution provided by the core-set algorithm and the most computationally efficient quasi-optimal solution provided by the spiral algorithm. The results show that the proposed approach provides similar results to those provided by other state-of-the-art algorithms while being an order of magnitude better in terms of computational time. In future research, we will enhance the coverage optimization by using deep RL with the reward function determined by the cGAN algorithm based on multiple network performance indicators.
Footnotes
Handling Editor: Peio Lopez Iturri
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Slovak Research and Development Agency, project numbers APVV-18-0214 and APVV-15-0055, by the Scientific Grant Agency of the Ministry of Education, Science, Research and Sport of the Slovak Republic under contract 1/0268/19, by the National Natural Science Foundation of China (No. 61962036), and by the Ukrainian government project No. 0120U100674, “Designing the novel decentralized mobile network based on blockchain architecture and artificial intelligence for 5G/6G development in Ukraine.”