
Abstract
To improve the performance of multi-unmanned aerial vehicle path planning in plateau narrow area, a control strategy based on Cauchy mutant pigeon-inspired optimization algorithm is proposed in this article. The Cauchy mutation operator is chosen to improve the pigeon-inspired optimization algorithm by comparing and analyzing the changing trend of fitness function of the local optimum position and the global optimum position when dealing with unmanned aerial vehicle path planning problems. The plateau topography model and plateau wind field model are established. Furthermore, a variety of control constrains of unmanned aerial vehicles are summarized and modeled. By combining with relative positions and total flight duration, a cooperative path planning strategy for unmanned aerial vehicle group is put forward. Finally, the simulation results show that the proposed Cauchy mutant pigeon-inspired optimization method gives better robustness and cooperative path planning strategy which are effective and advanced as compared with traditional pigeon-inspired optimization algorithm.
Introduction
Path planning is the first step in a moving multi-agent mission system. To distinguish from path management, path planning aims to find a set of waypoints from a start position to a target position to instruct agents moving. 1 While path management aims to generate feasible trajectories based on waypoints which are parameterized by time and could be described by twice-differentiable polynomials. Path management is necessary for most of the intelligent agents, for example, unmanned aerial vehicles (UAVs), which are unable to move along zigzags paths which are simply generated by connecting the waypoints.
Two decades ago, path planning problem focus on the ground moving robot mission with known threat locations. The path planning method based on randomly sampling search algorithms such as rapidly exploring random tree, probabilistic roadmap and Voronoi diagram approach are able to give a near optimal solution.2–4 Unfortunately in some complex environments, for example, when unpredictable obstacles exist, these randomly sampling search algorithms usually cannot construct feasible paths for robots. As a result, this contradiction promotes the motivation to work out more practical path planning strategy. To implement path planning in complex environment effectively and efficiently, about a decade ago many traditional heuristic algorithms, such as spares A* algorithm, D* algorithm and model predictive control (MPC), are utilized to develop more advanced path planning strategies.5–9
In recent decade, three-dimensional (3D) UAV cooperative mission path planning problem attracts prime attention since the traditional heuristic-based path planning methods suffer more and more challenges that resulted from realistic mission requirements, physical constrains of devices and complex environmental threats. The traditional heuristic path planning strategies are unable to give an optimal or sub-optimal solution rapidly and accurately in the new difficult mission settings, they have slow search speed and easily fall into local areas. To find paths timely and effectively with minimum fuel consumption and collision free in 3D cluttered complex environment, artificial intelligence (AI)–based path planning method attracts wide publicity. This kind of algorithms are inspired from nature including simulated annealing (SA), genetic strategy (GS) algorithm, ant colony (AC) algorithm, artificial neural network (ANN) algorithm, pigeon-inspired optimization (PIO) algorithm, bat strategy algorithm (BA) and artificial bee colony (ABC) algorithm. These AI algorithms can work out the near optimal paths in 3D complex cluttered environment with fast convergence speed, but sometimes, the research process may also fall into local optimization.10–18 To improve the optimality of solutions obtained by AI-based path planning algorithm, many researchers dedicate their efforts. Wu et al.’s 19 metropolis criterion which is based on probability theory is utilized to obtain new individuals for traditional particle swarm optimization (PSO) algorithm. In an advanced path planning strategy, chromosome-encoding strategy is proposed for conventional genetic algorithm to guarantee a feasible path to avoid the searching circulation. While a call back mechanism is designed in for traditional bee colony algorithm to give a shortest and safest path.20,21
In this article, multi-UAV co-operative path planning problem in plateau narrow area is defined. By comparing with other 3D sceneries, mountainous plateau environment provides more challenges for UAV path planning, for example, dangerous peaks and unpredictable meteorological factors like atmospheric turbulence, wind shear and so forth. 22 These disadvantages will seriously affect the stability of UAV co-operative flight. When implementing path planning in this extremely complex workspace, an AI path planning algorithm with fast convergence speed is urgently required. A new kind of swarm intelligence optimization algorithm based on pigeon homing behavior algorithm is proposed in Duan and Qiao, 12 called PIO algorithm. The most remarkable advantage of PIO algorithm is its fast convergence speed.
The algorithm consists of two independent computing sections: geomagnetic navigation section and landmark navigation section, which simulates the navigation mechanism of pigeons using different navigation tools at different stages in the process of finding their destination. Specifically, pigeons first adjust their direction through geomagnetic field and solar altitude, and then they will judge the direction and location by the landmark information adjacent to the destination. Inspired by the process by which pigeons find their nest and the similarity of the process with UAV path planning process, that is, both have multi-objective optimization problems with known starting and ending points, it is feasible to apply the pigeon’s behavior model for the path planning of UAVs.
However, due to the high complexity of plateau narrow area and its internal attribution, PIO algorithm is easy to fall into local optimum in the early stage of operation, resulting in unsatisfactory results. The best way to avoid local optimum is to increase the diversity of population. In this article, mutation operator is employed for map and compass operator. Normally, mutation operator is used in genetic operation to ensure population diversity, which is similar to the process of biological variation. Mutation operation could create a new individual by changing some information of an original individual. In general, mutation operators 23 include bit element mutation, boundary mutation, uniform mutation, Cauchy mutation and so on.
By comparing and analyzing the changing trend of fitness function of the local optimum position and the global optimum position when solving UAV path planning problems, Cauchy mutation operator is chosen to improve the PIO algorithm, the new algorithm is called Cauchy mutation PIO (CM-PIO) algorithm. This improved PIO algorithm can effectively extend the search area by mutation operation and could ensure that the pigeons can fly to the global optimal solution quickly. It can also reduce the risk that the solution will fall into the local optimal. Cauchy mutation operator aims to change the individual’s state value by selecting random numbers obeying Cauchy distribution, and to realize individual variation. In addition, considering the length and location information of each UAV path, a cooperative path planning strategy for multiple UAV is designed.
The main contributions in this article are as follows:
The integrated model of multi-UAV co-operation path planning problem is established including plateau topography model, plateau wind field model, a variety of constrains of UAV, including maximal flight length, minimal length of leg, maximal turning angle, maximal climb/dive angle and maximal flight altitude and the expression of fitness function.
For the reason that conventional PIO algorithm easily falls into a local optimal area when solving multi-UAV co-operative path planning problem in plateau narrow area, during PIO iteration process, Cauchy mutation operator is added into map and compass operator. This improved PIO algorithm (CM-PIO algorithm) is able to provide better solution than conventional one.
Based on the proposed CM-PIO algorithm, a co-operative path planning strategy for multiple UAVs is presented, where a coordination coefficient is designed to consider the length and location information of each UAV path.
The organization of this article are as follows: section “Problem formulation” defines the complete problem formulation constraints, that is, UAV parameters, terrain constraints, wind field model, the cost of path and multi-objective optimization model which is followed by section “PIO Algorithm,” which discusses the PIO algorithm. Section “CM-PIO-based path planning” defines the CM-PIO-based path planning of UAVs. In section “Cooperative path planning strategy,” the path planning strategy is discussed. Section “Simulation results and discussion,” defines the simulation results and its discussion. Finally, section “Conclusion” concludes the whole article.
Problem formulation
UAV’s parameters
Each UAVs have their own parameters, taken from Hebecker et al. 24 and Jian et al., 25 such as maximum range limit, the shortest route limit, maximum turning angle limit, maximum climb/dive angle limit and maximum flight altitude limit.
Maximal flight length
The maximal flight length of UAV is limited by the amount of fuel. Besides, when UAV flies through a wind field, the drag becomes larger and causes an increment in the consumption of fuel. However, when passing through the mountain areas, the UAVs have the action of climbing or descending. In this case, the energy consumption of the UAV is higher. So, the maximal flight length will be limited. Assuming that the maximal flight length is

Minimal length of leg
When UAV flies in a leg, it needs some time to adjust their altitude to reach the next leg. To ensure flight safety and quality, the length of leg must be more than the smallest value. The length of every legs should satisfy
Maximal turning angle
The maximal angle between the directions in current leg and next leg are called the maximal turning angle. To avoid mountains, sometimes UAVs have to change their flight direction. But, the maximal turning angle of UAV is limited by its maneuverability. The real turning angle must be smaller than their maximal turning angle. Assuming

Maximal climb/dive angle
Maximal climb/dive angle refers to the maximal angle to which UAV is able to climb or dive relative to horizontal flight, and the maximal climb/dive angle is expressed as

Maximal flight altitude
When flying at low temperature environment, which is one of the main features of plateau, performance engine always suffers degradation. The maximal flight altitude of UAV is lower than that in plain areas. Assuming the maximal altitude is

Terrain constraint
A function commonly used in terrain simulation is used to generate datum terrain and peak terrain in Chao. 26 The expression of datum terrain function is
where
The expression of peak terrain function is
where
Combining the datum terrain function and peak terrain function, the plateau terrain will be described as

which is depicted in Figure 1.
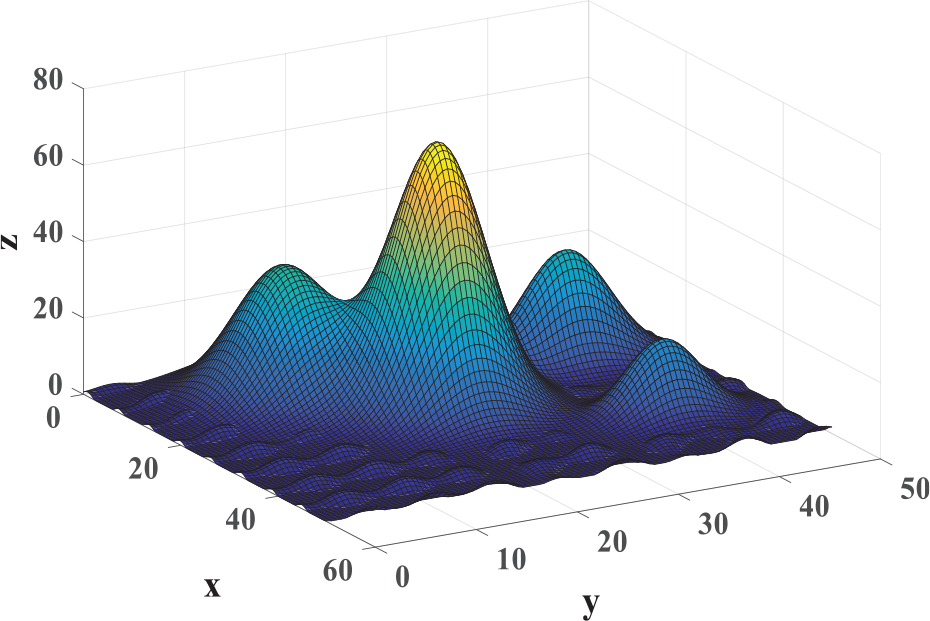
The 3D plateau terrain.
Wind field model
When UAVs fly in plateau mountainous area, their speeds and altitudes will be disturbed by wind. As a result, it is difficult to maintain a fixed formation of flight and even brings disadvantage to the flight safety. In this research, the wind field is taken as a threat area and the spherical model is used to represent the wind field which is written as

where
The cost of path
The cost of path is an important index to evaluate the quality of a planned path. The purpose of path planning is to find a suitable path with the lowest cost of path. Based on the actual flight environment and the UAV’s performance, the cost of path is classified into three sectors: distance cost, altitude changing cost and threat cost.
Distance cost
The limited amount of fuel must be taken into account in path planning. So, the flight distance should be shortened as far as possible. Assuming that a complete path is composed of

where
Altitude changing cost
When UAVs fly near a peak, some height changing actions have to be implemented to avoid the peaks. But this maneuver will cause fuel consumption. In addition, low temperature makes the engine perform worst, frequent maneuver may bring risk for the flight safety. Therefore, frequent altitude change should be avoided as far as possible.
The altitude changing cost can be expressed as

Threat cost
The threat cost is related to the distance between the UAV and the threat area. The closer the UAV is to the threat area, the bigger the threat cost is. The main threat areas considered in this article are terrain threat and wind field threat. The threat cost is defined as

where

where
Multi-objective optimization model
Considering the parameters of UAV and the cost of path, a multi-objective optimization model for UAV path planning can be obtained using the fitness function that can be expressed as

and the constraint function is written as
For the multi-objective function, it is difficult to find a solution that satisfies the minimal value of each evaluation function at the same time. It is necessary to synthesize all the cost values by appropriate weights to coordinate every performance. The fitness function of UAV path planning is constructed as

The weights in the formula can be adjusted according to the actual mission requirements and flight environment requirements. When the desired mission time is short, the distance cost weight will be increased. While if the desired flight path of UAV is smooth, the altitude changing cost will be increased.
PIO algorithm
PIO algorithm is divided into two independent stages. In the first stage, the pigeon updates the position and speed of the individual by map and compass operator principle. In the second stage, the pigeon updates the state by landmark operator principle.
The description of PIO algorithm is as follows: Assume that the search area of PIO algorithm is a “D” dimensional space, and there are “M” pigeons in the group, in which the position of the ith pigeon represents one of the solutions of the optimization problem. Each individual pigeon will constantly adjust its position according to certain rules. With the help of fitness function, the fitness of each individual can be calculated. The individual position will be continuously updated in each iteration, and finally the optimal solution will be found. The position of the ith pigeon in the “D” dimension space can be expressed as
In the first stage, each individual states are updated according to the information of the best individual in the population by updating position according to formula (16) and updating the speed according to formula (17)


where
In the second stage, when the pigeons approach target position, their states will be updated according to the landmark information. Some individuals will follow other individuals who are near the landmark, while some far from the landmark that will be abandoned because they have no ability to find the optimal path. In the calculation process, the number of pigeons will be halved in each iteration by abandoning pigeons that have poor adaptability and then look for the central location


where F is related to the fitness function. It could be expressed as

The maximal iteration in the second stage is
CM-PIO-based path planning
Cauchy distribution is a continuous probability distribution without variance and mathematical expectation. If the random variable
The probability density function of Cauchy distribution is
In equation (22),

Cauchy mutation map and compass operators
In the traditional PIO, map and compass operators are mainly used to find the global optimal individuals in the search space, and then positions and speeds of the pigeon swarm will be changed by referring to the optimal individuals. While choosing the Cauchy mutation
The Cauchy weight coefficient

where

In each iteration, the position of the individual pigeon is updated by the following rule

where

As for Cauchy mutation map and compass operators
Cauchy mutation landmark operators
In the tradition PIO algorithm, the scale of population will be reduced by half at each iteration in the landmark operator stage, with pigeon moving toward the central position of the pigeon swarm. Unfortunately, this rapid reduction of population will lead to premature convergence of the algorithm, which will have a negative impact on the optimization of the landmark operator stage. To avoid the premature convergence or missing the optimal solution, the traditional landmark operator is replaced by a Cauchy function, updating the individual position relying on the optimal position in the population. The Cauchy function is described as

Cauchy weight coefficient

where

where
In the Cauchy mutant landmark operator stage, all individuals gradually approach the global optimal solution because of the positive constant
Cooperative path planning strategy
Assuming three UAVs take off from different locations at a same time and fly to one specific area for a mission. During the flight process, the three UAVs are required to keep safety distance and reach the target area within a similar duration.
Figure 2 depicts a scenario for multiple UAV cooperative path planning. Basically, each UAV must avoid flying in threatening area. The figure shows the shortest safe distance
A background setting for cooperative path planning.
Therefore, in addition to care about the parameters of UAV, multi-UAV path planning also care about the space and time relationships between all UAVs which may give some constraints to cooperative path planning.
First, a sufficiently safe distance

When all UAVs generally approach the target area, and their distances get closer and closer, so the safe distance should be set different value in different stages as

where
Moreover, both UAVs are desired to reach their desired target position simultaneously. According to the allowed speed range and length of path, the shortest time and the longest time for each UAV to reach the target point will be calculated. Assuming the allowed speed range of

The temporal cooperation rule for two UAVs is

In this case, the two UAVs will have the possibility to simultaneously arrival to the target position.
To meet the spatial requirement and the temporal requirement of UAV group, two coordination coefficients are added to each UAV’s path evaluation function. They could be expressed as



where
In terms of the proposed strategy for cooperative path planning problem, each UAV is represented by a sub-population, and each sub-population evolves independently. Only when evaluating the individual fitness, the information between sub-populations will be communicated. In the multi-population’s co-evolution process, the optimal individuals of each population are selected to communicate with other populations. This co-evolution process is shown in Figure 3.
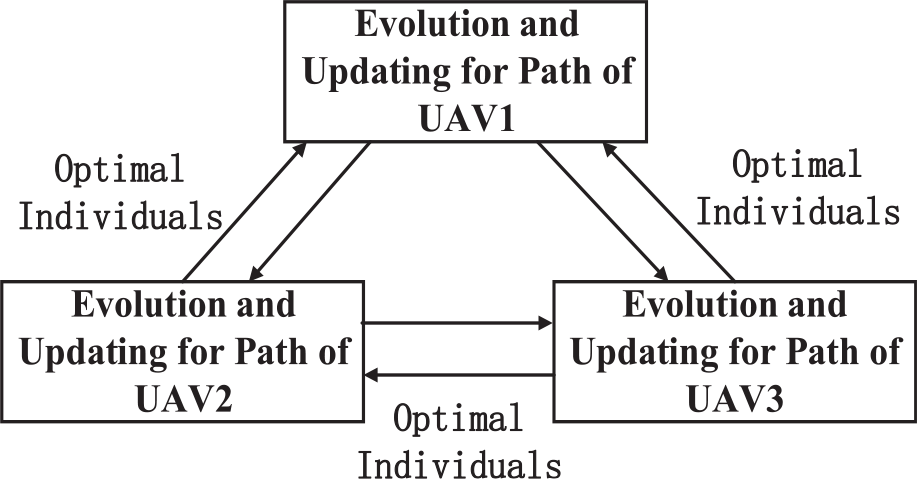
Co-evolution process in coordination path planning.
The path planning process for each UAV will refer to other UAV’s paths and calculating the spatial and temporal coordination coefficients between UAVs. Finally, more suitable path will be selected which not only have advanced fitness but also meet the cooperation requirement.
The specific steps of CM-PIO cooperative path planning strategy are presented as following:
Step 1. Define the area for path planning of every UAV.
Step 2. Initialize the algorithm parameters including the scale of population
Step 3. Individual coding rules randomly generates
Step 4. Find
Step 5. Update the individual’s positions and speeds in each population by the Cauchy mutation map and compass operator.
Step 6. Compare the current iteration in map and compass operator stage with the maximal iteration
Step 7. Update the individual’s positions by landmark operators.
Step 8. Compare the current iteration in landmark operator stage with the maximal iteration
The diagram of multi-UAV coordination path planning strategy is shown in Figure 4.
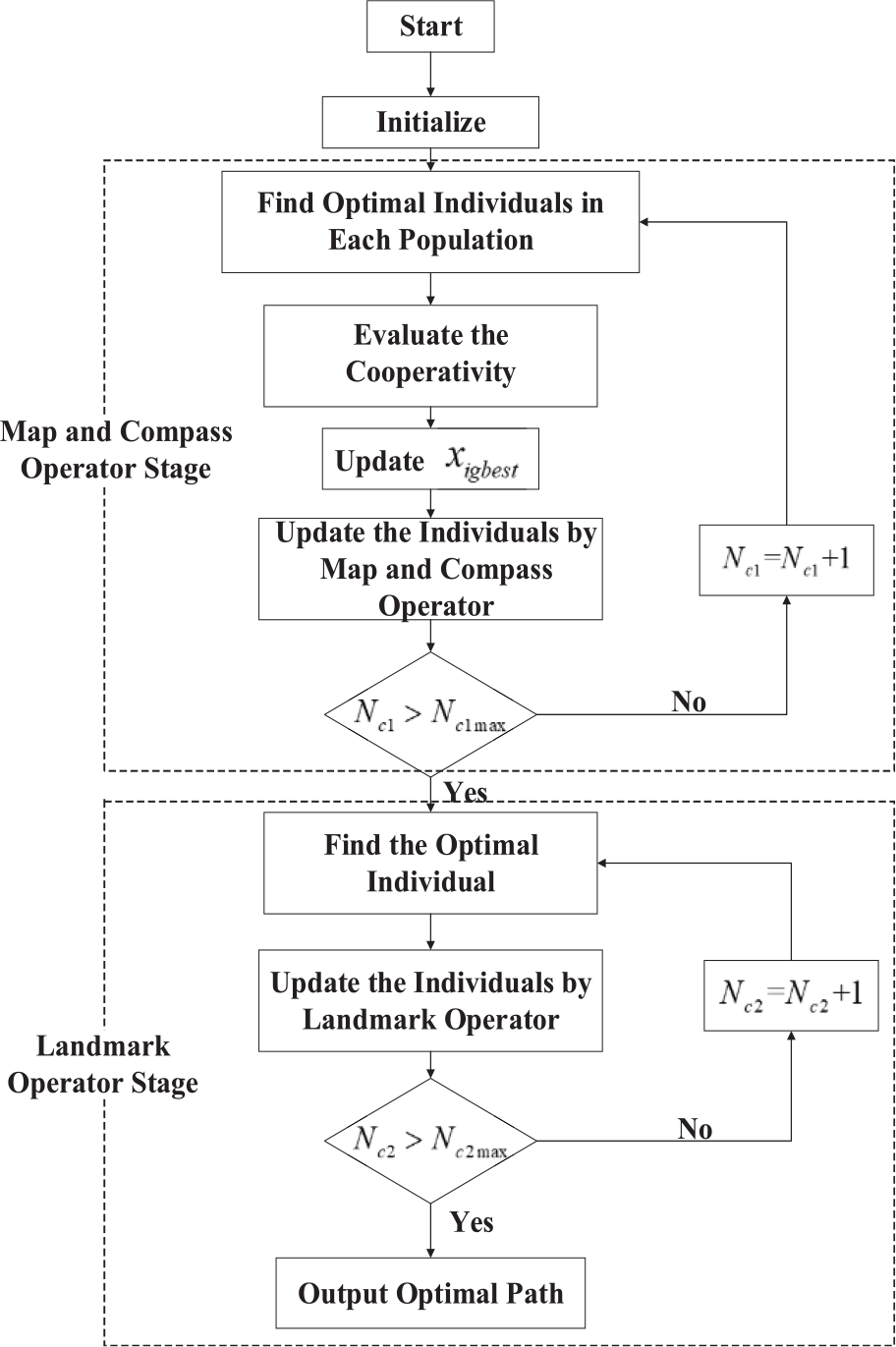
Procedure of CM-PIO cooperative path planning strategy.
Simulation results and discussion
The simulation results is carried out on MATLAB/2014a. Providing a path consisting of 11 waypoints and 10 path sections. Flight space is set as
Simulation parameters
The parameters of UAV are presented in Table 1.
Parameters of UAV.
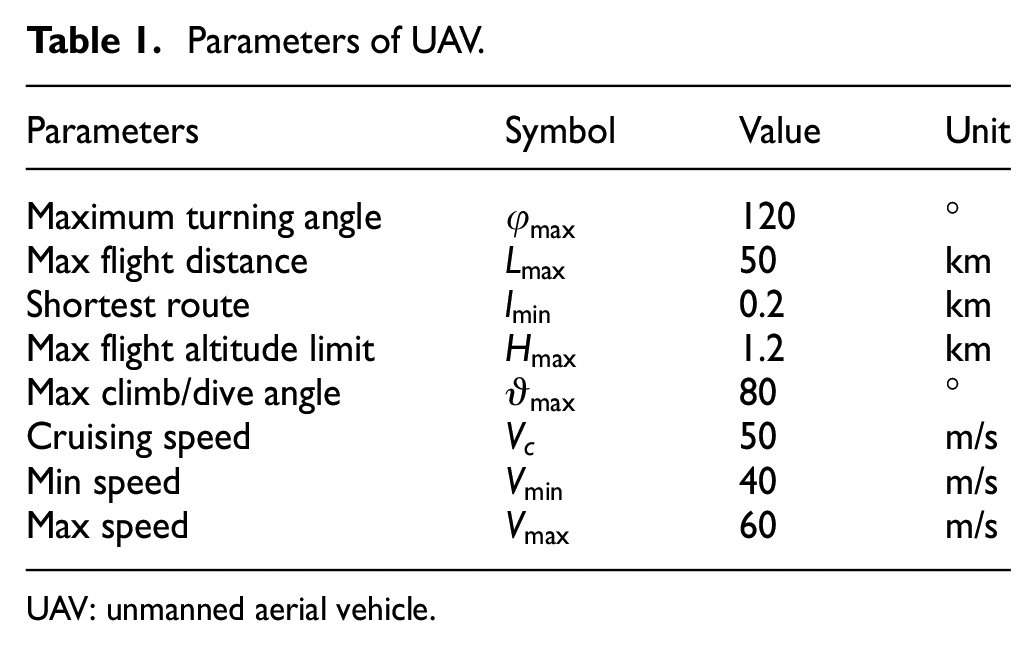
UAV: unmanned aerial vehicle.
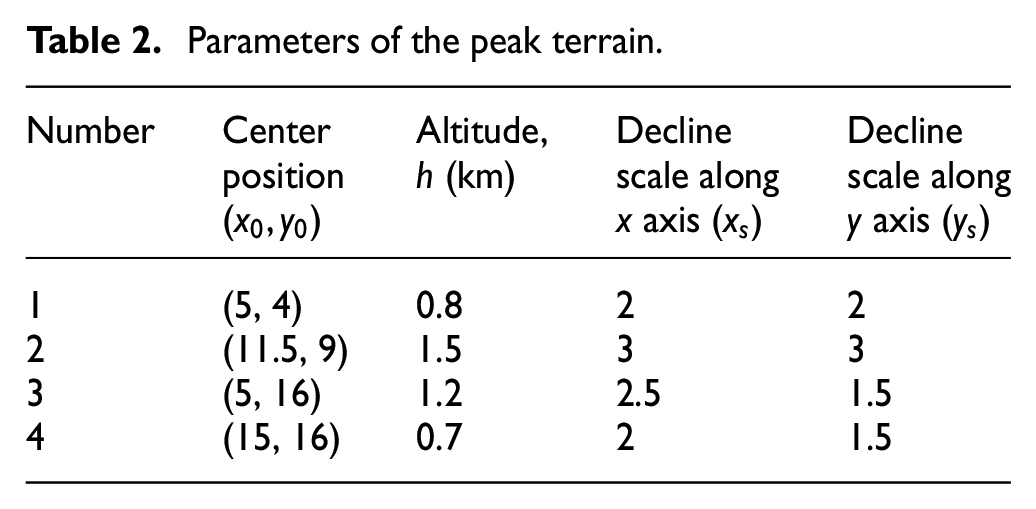
Based on the field investigation and topographic analysis of the mountainous area in the Qinghai-Tibet plateau, the parameters of the datum terrain are indicated as
The parameters of the peak terrain are shown in Table 2.
Parameters of the peak terrain.
The parameters of wind field model are shown in Table 3.
Parameters of wind field model.
The parameters of proposed CM-PIO algorithm are presented in Table 4.
Parameters of proposed CM-PIO.
CM-PIO: Cauchy mutant pigeon-inspired optimization.
For the fitness function, weights of distance cost, altitude changing cost and threat cost are
The coordinates of start and target points for each UAV are shown in Table 5.
Coordinates of start point and target point for each UAV.
UAV: unmanned aerial vehicle.
Results of CM-PIO-based path planning method
To verify the robustness of the proposed path planning algorithm, the paths planned by traditional PIO algorithm are also presented in Figure 5. The cone represents the peak, the sphere areas near the peak represent the wind field, the solid line represents the optimal path planned by CM-PIO algorithm and the dash line represents the optimal path planned by PSO algorithm. Each path includes 11 waypoints which are represented by circles.
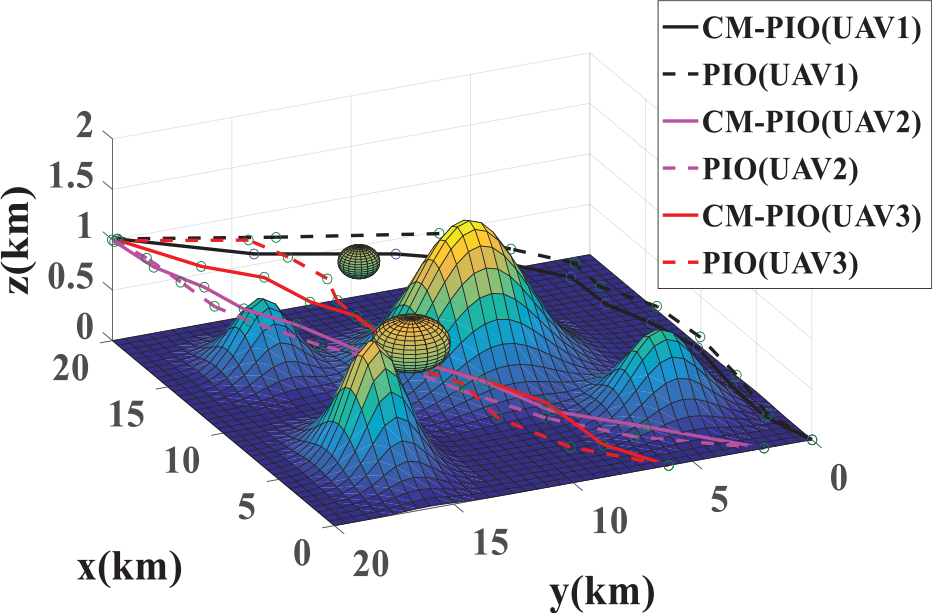
The paths planned by CM-PIO and PIO.
It can be seen from Figure 5 that both algorithms can plan feasible paths. Although, the route planned by PIO algorithm can avoid the threat of mountain peaks, the total distances are longer and the altitude near the peak and wind field suffer greatly changing, which will increase the risk of collision. The paths planned by CM-PIO is shorter, smoother, lower cost and safer. Figure 6 illustrates the change in the fitness of the optimal paths of three UAVs, by PIO and CM-PIO. It can be seen that CM-PIO can find the optimal path faster and more excellent. Besides, the Cauchy mutant could create the most optimal individual when the traditional PIO has fallen in to the local optimum.
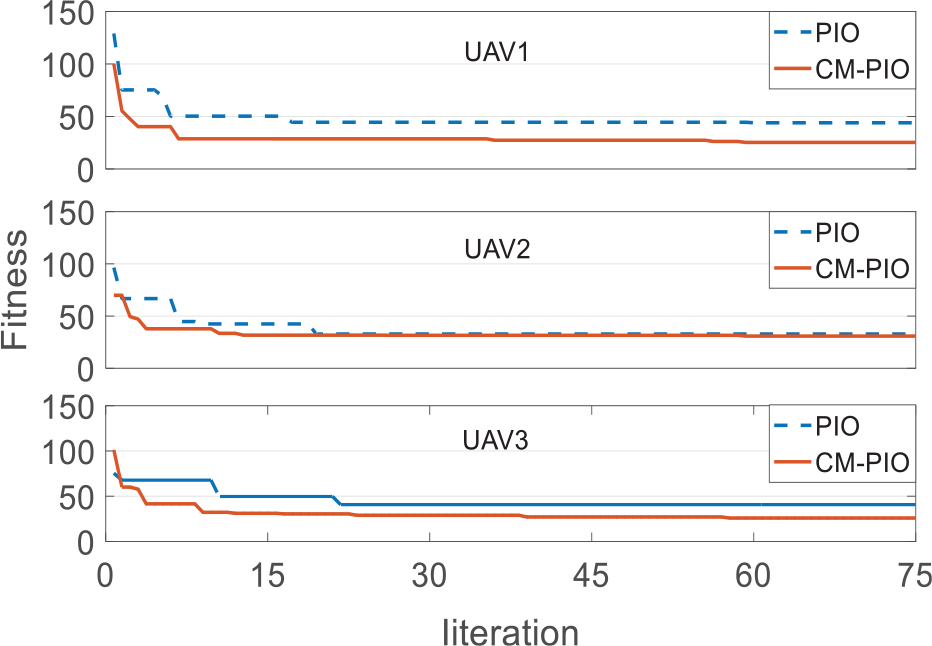
Fitness of optimal individual changing with iteration.
Results of cooperative path planning strategy
It can be seen in Figure 7 that without cooperative planning the path of UAV2 and the path of UAV3 are close and have intersection. To ensure the spatial requirement, cooperative path planning is needed. Figure 8 shows the fitness of optimal individuals changing with iteration planned by CM-PIO cooperative planning strategy and Figure 9 shows coordination coefficient
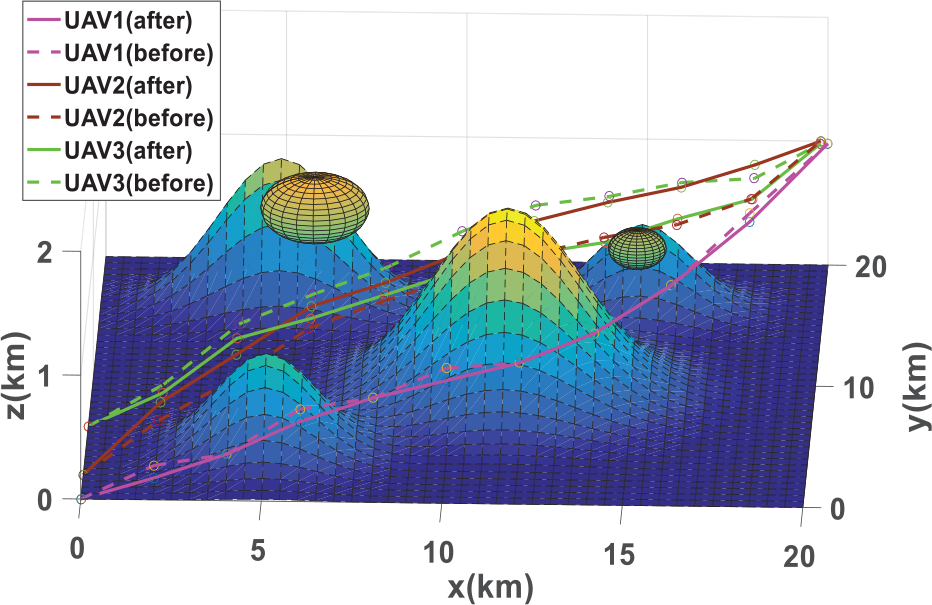
The paths with and without cooperative planning.
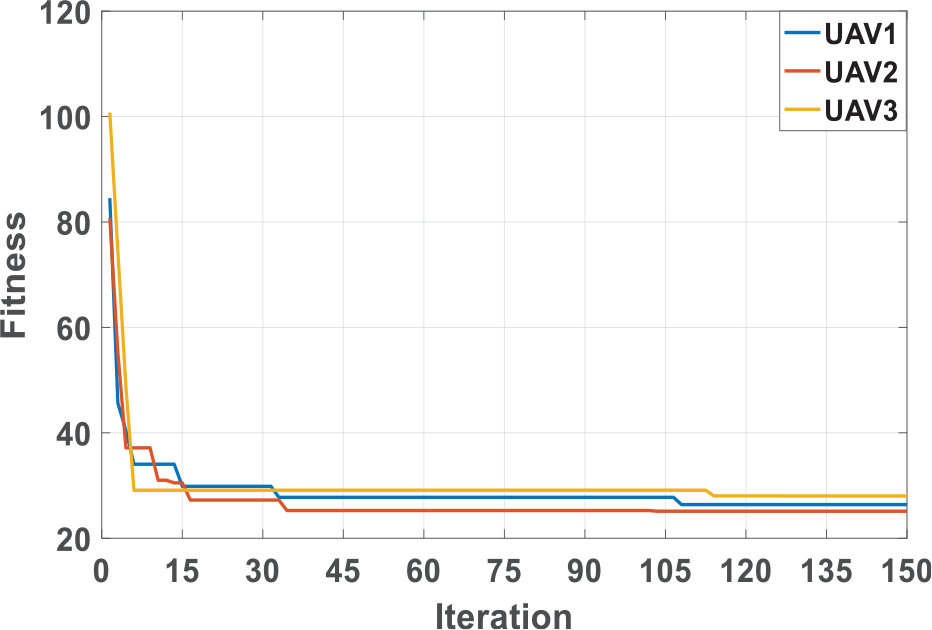
Fitness of CM-PIO cooperative plan changing with iteration.
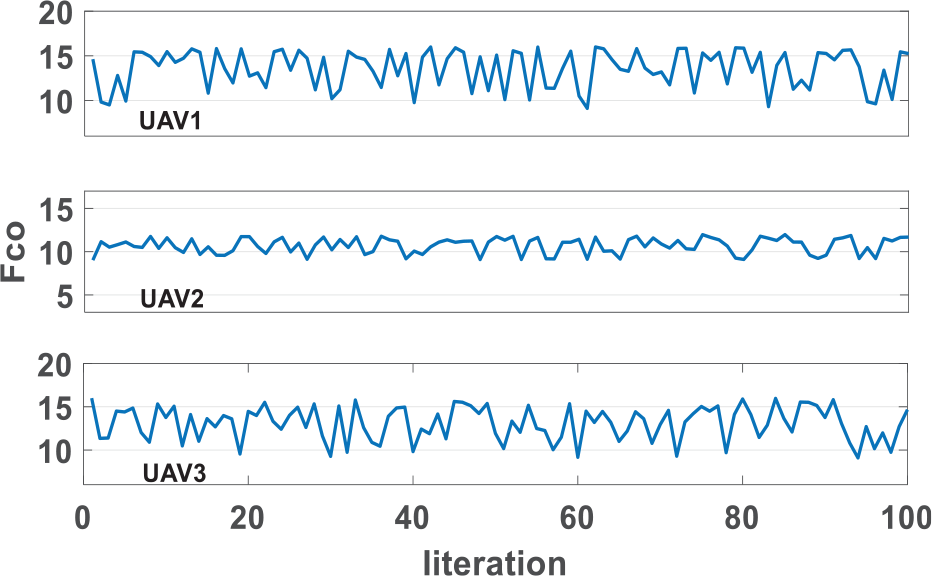
Coordination coefficients of three paths changing with iteration.
Length of planned paths.
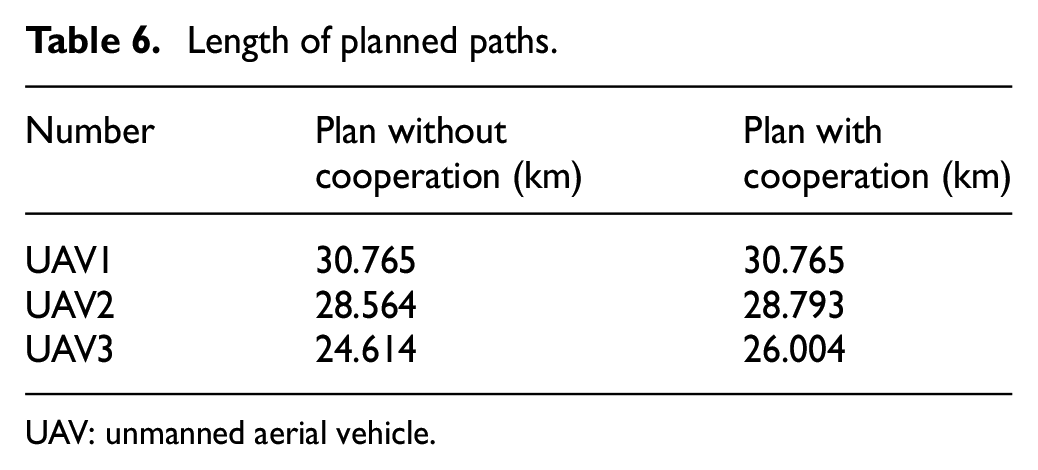
UAV: unmanned aerial vehicle.
Conclusion
For the path planning problem of the UAV group in plateau area, first the problem was modeled as a multi-objective optimization problem and then CM-PIO algorithm is designed to find the optimal path for each UAV. Compared with the traditional PIO algorithm, the result shows that the solution of proposed method has better robustness. Finally, considering the spatial constrain and temporal constrain of multi-UAV cooperation path planning problem, the CM-PIO cooperation path planning strategy was designed. The simulation results show the proposed method could not only find optimal individuals with advanced fitness but also meet the coordination requirements.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship and/or publication of this article.