
Abstract
Aiming at the shortcomings of the existing control law based on the global information, this article studies the coverage problem of a given region in the plane using a team of USVs. The coverage goal, which is to cover a given search domain using multiple mobile sensors so that each point is surveyed until a certain preset level is achieved, is formulated in a mathematically precise problem statement. The adaptive control law is presented which enables multi-USV to navigate in a complex environment in the presence of unknown obstacles and guarantees that a fully connected multi-USV system attains the coverage goal. In particular, the dangerous area was divided into two different parts in order to enhance the searching efficiency. Finally, simulation results are presented to validate the feasibility and efficiency of the proposed approach.
Introduction
In recent years, with the rapid development of sensor technology,1,2 intelligent system guidance and control technology,3–5 information processing technology between sensor networks 6 and communication technology, people have formed a certain scientific understanding of the generation mechanism and implementation strategy of regional environmental reconnaissance and monitoring. 7 They believe that its essence is to ensure that the agent moves along a specific track by studying its control methods and make use of the relevant information collected by the sensors it carries to realize the regional reconnaissance and monitoring. Therefore, the problem of regional reconnaissance and monitoring is essentially a multi-USV regional coverage control problem.
At present, the research on regional coverage control of marine environment has been widely valued in both military and civilian areas. In the military aspect, area coverage control can be used for multi-USV seabed topographic mapping, mine detection, and so on.7–9 In the civil aspect, it can be used for underwater search and rescue, sunken ship salvage, cleaning up oil leakage on the sea surface, and so on.10–12 Because underwater detection mainly relies on sonar means, unmanned surface vehicle (USV) has become the most important carrying platform. Due to the limited detection and endurance of a single USV, it is unable to efficiently complete the search task in large area of sea,13–15 so the autonomous search system of multi-USV has become an inevitable development trend. In complex environment, the cooperation among multi-USV is the bottleneck problem of autonomous search system. At present, the main solution to the problem of cooperation among multi-USV is the area division and route planning based on the global information,16–18 that is, when the number and location information of obstacles are known, the search area is divided into sub areas, and then the command center assigns search tasks of different sub areas to the unmanned vessels, so as to realize the cooperation of multi-USV system.
The task assignment scheme for multi-USV cooperation based on global information is not flexible, and the shape of obstacles and the navigation route of USVs are fixed, so it is unable to complete the search task in complex environment. Therefore, in order to meet the practical application requirements of the search task in complex environment, the multi-USV adaptive search system must be based on its own real-time perception of local information, as well as part of the environment information obtained by real-time interaction with other USVs, so that each USV can adaptively plan the route, and achieve the functions of collision avoidance, obstacle avoidance and target search.
The rest of this article is organized as follows: In section “Problem formulation,” we formulate the problem and then define the sensing area of USV and the function of the sensing ability. The adaptive searching method was presented in section “Adaptive control law.” The control law of driving force and repulsion force based on potential field method is given to make the coverage operation feasible in complex environments in the presence of unknown obstacles. Section “Simulation results” demonstrates the effectiveness and feasibility of the proposed approach via computer simulations, performed on a team of USVs. Section “Conclusion” summarizes the article and draws some conclusions.
Problem formulation
This article studies the problem of detecting underwater target in a fixed water area by cooperation of multi-USV under ideal conditions .Therefore, the following assumptions are given:
Assumption 1
The total number of USVs is N and
Assumption 2
The water surface is smooth, and every USV moves on a plane.
Assumption 3
The detection probability of the on-board sensor is 100%, that is, the detection probability of the sensor detection equipment has no effect on the results.
Assumption 4
The sensing range of each agent is a limited circular area, the divergence angle of detector is

Diagram of the circle sensing region.
The sensing area model of agent

where
Assumption 5
Within the sensing range of the agent, the perceptual ability of all points is constant

Since the information accumulation of a point in the fixed area obtained by USV using the sensor increases with time, that is, the level of effective coverage of a point in the area increases with time, for any point

Adaptive control law
The rationale of adaptive control law is to drive each agent to move toward the direction of low coverage level by establishing the potential energy function about the error between the expected coverage level and the actual coverage level, so as to complete the coverage task. Gradient descent method is often used to design control laws for agent.
Optimum coverage velocity
Let C* be the desired attained effective coverage at all points

where
To guarantee the coverage of the entire domain S with an effective coverage of C* under appropriate assumptions, USV has to move toward the area where

The gradient descent method can be used to solve formula (5) to obtain the optimal coverage speed of the USV. Therefore, the optimal coverage speed of the USV can be designed as follows
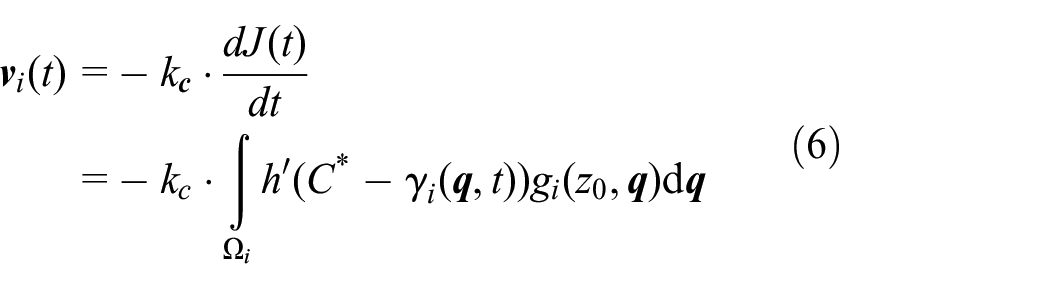
where
Since the optimal coverage speed of the USV is based on local information, when the points in the perception area of the USV are effectively covered, the USV will tend to be stationary. If the whole area has not been covered effectively at this point, a traction speed is required for the USV to avoid to get stuck in a local minimum.
First, the points in the task area that are not covered effectively are defined as the following set

Set

A rule can be set to choose a unique point from the set to calculate the speed of the USV at the next moment. The traction speed

where
In summary, the expected optimal coverage velocity of each USV in multi-USV system is

Repulsion
We now return to the fully connected network of multi-USV system. To avoid collision, it is necessary to consider a control strategy that ensures that the distances between two USVs or between USV and obstacle are not too close.
In order to ensure the safety of the USV navigation mission, local obstacle avoidance path planning algorithm is used for autonomous obstacle avoidance. The avoidance process of USV can be divided into the following steps:
Identify obstacles within the perception range by sensors;
Calculate the relative distance and speed between the USV and the obstacle;
Establish a local coordinate system and determine if it is in a dangerous area;
If it is in a dangerous area, take corresponding measures to avoid collision; otherwise, continue to navigate.
The main idea of collision avoidance algorithm is to measure the relative distance and speed of other nearby USVs and itself through the sensors carried by the USV. When the relative distance is less than the safe distance, calculate the velocity vector difference between the other USVs and itself, and determine whether it is in the dangerous area where collision may occur. If it is in the dangerous area, change its own velocity vector to get away from the dangerous area, so as to achieve the purpose of collision avoidance..
Assume two USVs navigate with velocity

The diagram of dangerous area.
The orange area and the blue area in Figure 2, respectively, represent the different types of dangerous area that means the collision would take place without velocity change. For local repulsion, we choose a simple half-spring model, 21 that is, a linear distance-dependent central velocity term with a cutoff at a maximum interaction range. For collision avoidance, the repulsion law was designed as follows

where
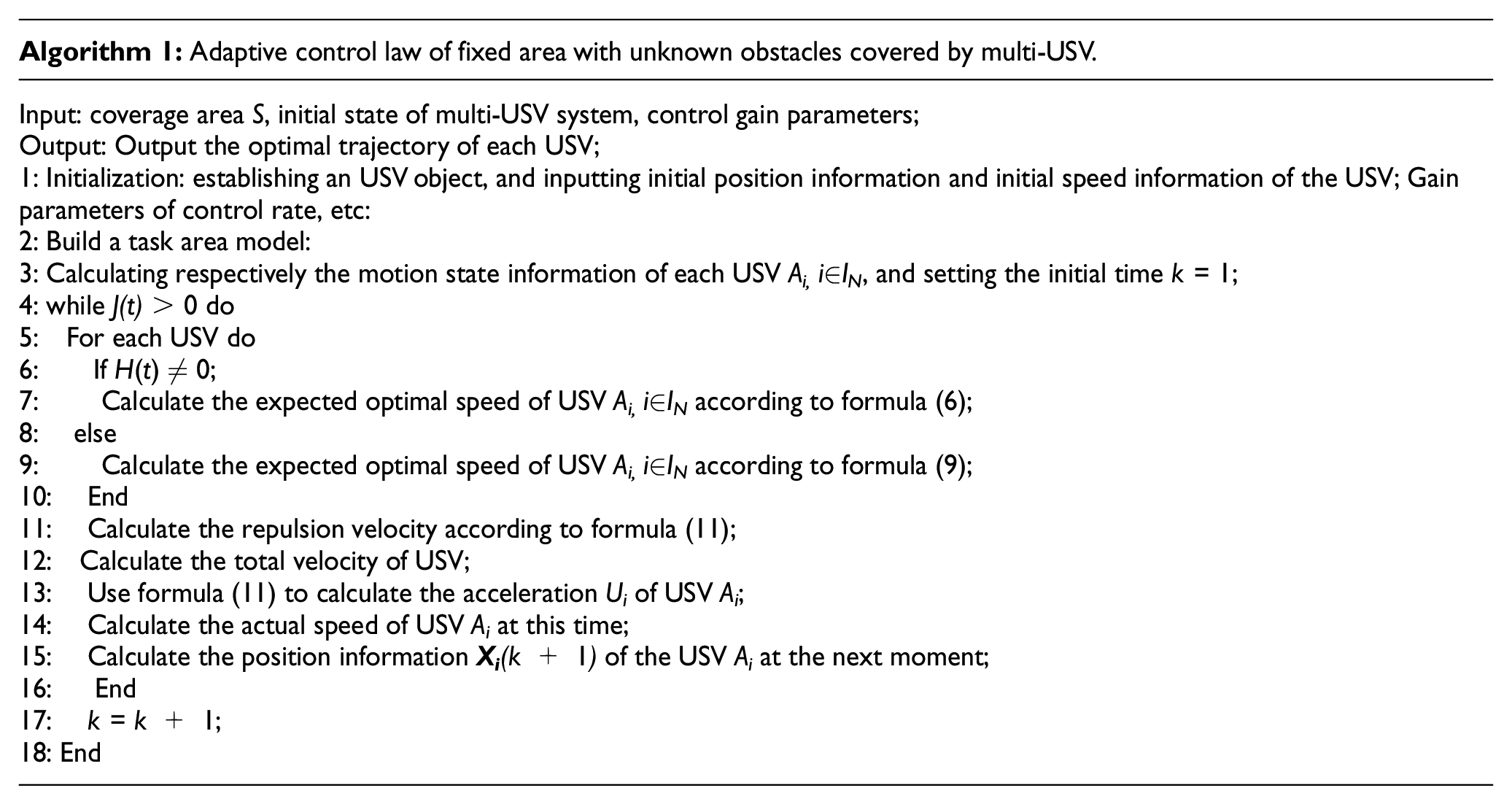
According to the above content, the pseudo-code of the adaptive control law of the multi-USV system is presented as follows:
Simulation results
In this section, we provide simulation results for the fully connected network case. Assume that task area S is a square region of side length d = 20 km. Let the desired effective coverage C* be 60. The initial velocity of each USV is 0 m/s. To amplify the process of collision avoidance, Let the sensing radius of a USV R is 2 km, the safe radius r is 1 km. There are 6 USVs with initial deployment as shown in Table 1.
Initial conditions of agents.

The trajectories of these USVs at different times are shown in Figure 3.

Trajectory of agents at different time: (a) trajectory of agents at t = 1 min, (b) trajectory of agents at t = 20 min,(c) trajectory of agents at t = 40 min, and (d) trajectory of agents at t = 56.88 min.
The coverage of the whole task area at different times is shown in Figure 4.

Diagram of area coverage at different time: (a) coverage effect at t = 1 min, (b) coverage effect at t = 20 min,(c) coverage effect at t = 40 min, and (d) coverage effect at t = 56.88 min.
It can be seen from the trajectory of USVs at different times in Figure 3 that there is no one USV collides with the obstacles or go through the obstacles. Each USV can keep a safe distance from obstacles and other USVs. And all USVs can do their searching mission without beyond the boundaries. Clearly, as can be seen from Figure 4, the domain is completely covered in the limited time, which shows that the adaptive control law is feasible and effective in controlling the multi-USV system to complete the searching task of the designated area.
Conclusion
This article studies the rationale behind multi-USV adaptive searching system under the complex environment with unknown obstacles. The adaptive control law is given. The feasibility and effectiveness of the law are verified by numerical simulation. First, the sensing area of a single USV was defined. And then, the driving force of USV was designed by the error function between actual coverage in the sensing area of USV and the effective coverage. Therefore, each USV in the searching system was driven to the area with lower coverage. Second, the repulsion law of USV was designed to avoid collision with other objects. To improve the searching efficiency, the dangerous area was divided into 2 different parts in order to reduce total times of avoidance of the multi-USV system.
In conclusion, compared with the existing control law based on the global information, the adaptive searching law of multi-USV is more adaptive to execute the task in the complex environment with unknown obstacles. USV can automatically navigate and avoid the collision based on the local information in the sensing area of USV. Therefore, the multi-USV system with adaptive control law will be the trend of development in the application of searching task under the complex environment.
Footnotes
Handling Editor: Lyudmila Mihaylova
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was funded by the Scientific Research Staring Foundation of Shantou University (No: NTF19028).