
Abstract
Omnidirectional mobile robots are used widely in logistics and manufacturing because of their high maneuverability in confined spaces. However, actuator failures and dynamic obstacles pose serious challenges, often degrading mobility and compromising safety. Earlier studies have addressed fault-tolerant control and obstacle avoidance separately, but few have considered integrated solutions that maintain reliable navigation under actuator degradation while ensuring timely avoidance of moving obstacles. This article presents a fault-tolerant navigation framework for a three-wheeled omnidirectional robot that integrates fault diagnosis, model switching, an enhanced potential field, and nonlinear model predictive control. Actuator faults are detected using an interacting multiple model approach, facilitating a seamless transition from a three-wheel holonomic model to a two-wheel nonholonomic model. To address reduced mobility after a fault, an enhanced potential field method is developed by incorporating predicted obstacle positions and directionally weighted repulsive forces, which generate smoother and earlier avoidance maneuvers. The resultant trajectories are tracked by nonlinear model predictive control to ensure accurate and constraint-aware path-following. Simulation results demonstrate that the proposed framework avoids both static and dynamic obstacles, maintains trajectory stability under an actuator failure, and greatly reduces abrupt maneuvers compared to conventional potential field approaches. These results highlight the potential of the proposed framework to advance robust and reliable navigation for omnidirectional mobile robots operating in dynamic and uncertain industrial environments.
Keywords
Introduction
Autonomous mobile robots are expected to play pivotal roles in reducing operational costs and enhancing efficiency in logistics and manufacturing sectors through automation.1–3 Among various types, omnidirectional mobile robots are particularly well-suited for obstacle avoidance and cooperative tasks in confined environments because of their ability to move freely in any direction without the nonholonomic motion constraints that hinder differential or four-wheeled drive systems.4–6 This capability enables flexible and efficient movement in restricted spaces, thereby promoting the adoption of omnidirectional robots across various industrial fields. 7 Because of their simple mechanics and straightforward control, they are now commonly used on warehouse floors and production lines. 8
Nevertheless, their performance, which is optimized for smooth, low-friction surfaces, is worse on uneven or outdoor terrain. Moreover, because each wheel is actuated independently, the platform's overall mobility is highly sensitive to single-actuator failures.9,10 Despite these limitations, omnidirectional robots are beneficial particularly where precise positioning and timely obstacle avoidance are required: there they are widely deployed.
In cooperative multirobot environments, this vulnerability is not only crucially important for individual robots: it also poses serious challenges. Most importantly, when one robot loses control because of a failure, the operational continuity of the entire system can be severely compromised. These considerations motivate integrated solutions by which each robot can diagnose its own faults online and switch its mobility model adaptively to continue operations. In practice, actuator faults often force a transition from nominal holonomic motion to a degraded mobility model with reduced lateral authority or additional nonholonomic constraints, under which conventional trajectory-tracking and obstacle-avoidance methods designed for nominal operation might become insufficient. This degraded mobility motivates planning and control frameworks tailored explicitly to the degraded model, enabling earlier and smoother avoidance along with constraint-aware tracking.
Recent studies have addressed individual components of these difficulties. Early work leveraged nonholonomic constraints to preserve controllability under single-motor failures. 11 Fuzzy-based and adaptive/sliding mode control-based fault-tolerant control approaches offer robustness and are amenable to online implementation. However, they typically emphasize controller design rather than integrated trajectory generation under conditions of degraded mobility.12,13 Model-based diagnosis and drive-level reconfiguration specifically address detection and reallocation, but they do not address navigation with dynamic obstacles directly. 14 Model predictive control (MPC)-based methods improve tracking under actuator faults, but many formulations either assume the post-fault model a priori or do not explicitly integrate online fault diagnosis and model switching with prediction-aware, directionally weighted avoidance tightly coupled to tracking.15,16 Consequently, a gap remains for a unified framework that couples online diagnosis, model switching to the degraded mobility, prediction-enhanced avoidance, and nonlinear model predictive control (NMPC)-based constraint-aware tracking for real-time navigation in dynamic industrial environments.
A representative study maintains vehicle operations by switching from a three-wheel to a two-wheel mode, followed by MPC-based trajectory tracking and obstacle avoidance. Although effective to some degree, this approach does not fully account for the altered motion characteristics after the transition. In the two-wheel mode, turning maneuvers often require speed reductions, which reduce time-to-collision margins. Also, abrupt directional changes can hinder recovery to the intended path, thereby degrading overall navigation efficiency.
To address these challenges, we propose an enhanced potential field-based trajectory generation method for omnidirectional robots subject to actuator failures. The method predicts future positions of dynamic obstacles and introduces directionally weighted, asymmetric repulsive forces, thereby enabling earlier and smoother avoidance. This enhanced avoidance allows for earlier and smoother avoidance maneuvers, which reduces the need for sharp turns. The generated trajectories are tracked using MPC, consequently enabling real-time obstacle avoidance and efficient navigation toward the goal.
The proposed approach mitigates the degradation in mobility performance caused by actuator failures, thereby enabling safe and efficient navigation. These study findings are expected to contribute to the advancement of robust and reliable mobile robotic systems suitable for industrial deployment in dynamic and uncertain environments.
The remainder of this article is organized as presented hereinafter. Section “System model” presents a description of the modeling of omnidirectional mobile robots and formulates an actuator fault diagnosis framework based on interacting multiple models (IMMs) and extended Kalman filters (EKFs). Section “Path planning using the potential field method” explains the proposed path planning method, which incorporates predicted obstacle motion and directional repulsive potentials. Section “Path tracking using MPC” gives an outline of the MPC strategy used for fault-tolerant trajectory tracking. Section “Simulation results” provides simulation results to validate the proposed approach. Finally, “Conclusion” section concludes the article and presents discussion of future work.
System model
Kinematic model of a three-wheeled omnidirectional robot
For this study, a three-wheeled omnidirectional robot is modeled as a rigid body moving on a planar surface without slippage. Counterclockwise rotation is defined as the positive rotational direction.
17
The coordinate systems used for this article are presented in Figure 1. The global coordinate frame


Model of an omnidirectional robot.
The tangential velocity vector of the omniwheels in the robot's local coordinate frame is defined as

Letting



The robot's velocity in the global coordinate frame is obtained by application of a rotation matrix to its local velocity as


This matrix transforms the robot's local velocity into its global velocity and serves as an intermediate step when computing the wheel tangential velocity from a global reference trajectory. To account for internal, nonparametric uncertainties (e.g. slight slip, floor unevenness), we augment the kinematics with a bounded disturbance
The magnitude and structure of

Fault detection and transition to two-wheel model
Actuator faults are detected autonomously using an IMM framework combined with multiple EKFs to estimate the most probable fault mode.18–20 Letting k denote the discrete-time index with sampling time


In those equations, the control input
EKFs are run in parallel for mode-conditioned dynamic models: the normal condition (Mode 0), and three single-actuator fault conditions (Mode 1 through Mode 3).18,19 A fault condition is defined as a state in which the tangential velocity


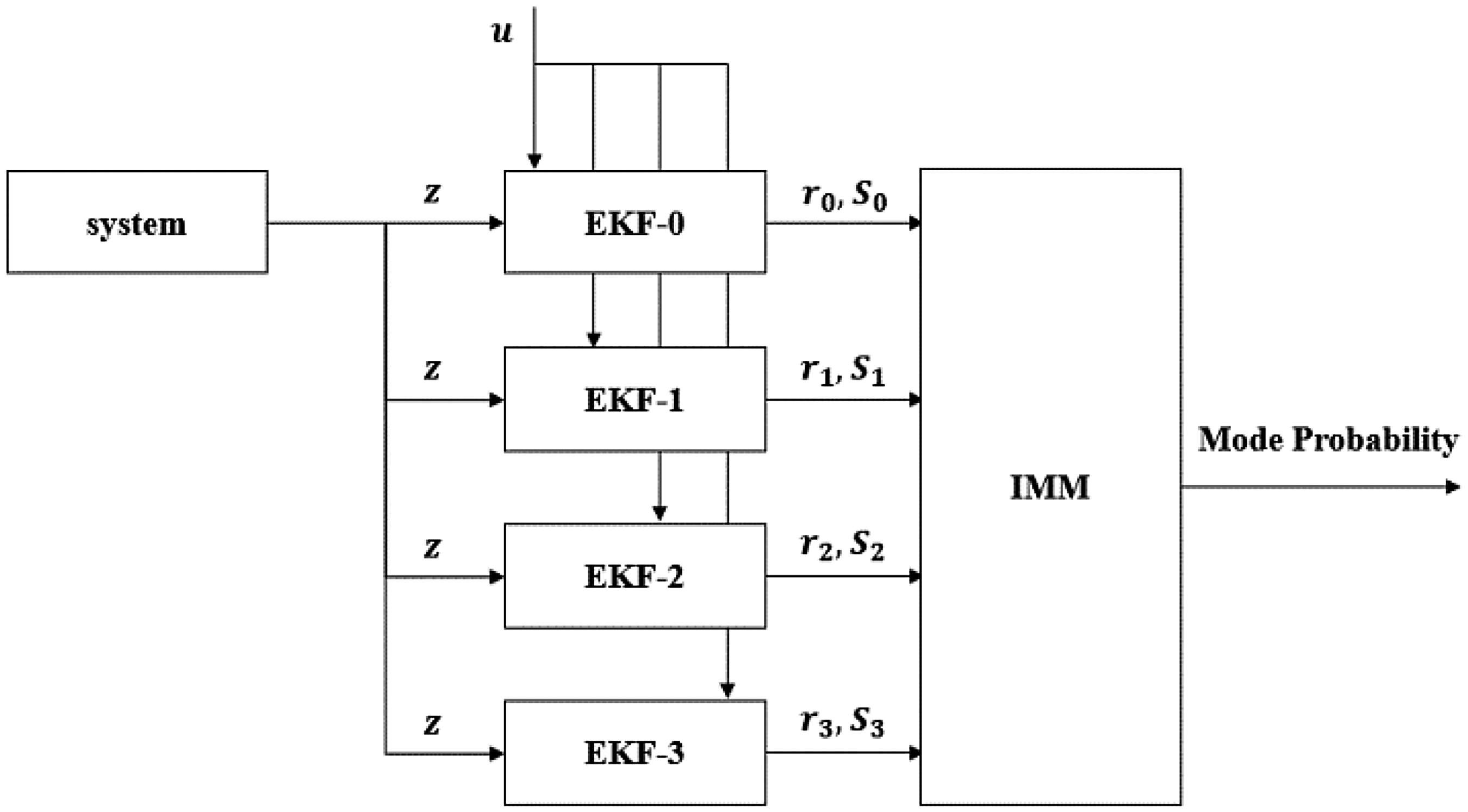
Structure of mode identification using the IMM method. IMM: interacting multiple model.
Path planning using the potential field method
Basic path generation with the artificial potential field method
Artificial potential field (APF) method is employed for path planning for this study to enable effective obstacle avoidance. APF generates a navigation path by superimposing an attractive potential field, which guides the robot toward the goal, and repulsive potential fields, which steer the robot away from nearby obstacles to prevent collisions.22,23 Unlike approaches that embed APF directly into the MPC cost and constraints, 24 we use APF solely for reference synthesis while enforcing clearance through hard inequality constraints. For unstructured, dynamic environments, contouring-control MPC provides an effective avoidance formulation. 25
Letting the position vector of the robot in a two-dimensional (2D) workspace be denoted as


Next, repulsive potential fields are defined to produce forces that repel the robot from nearby obstacles. Letting


The repulsive force acting on the robot is given by the negative gradient of the total repulsive potential

The total potential function

Accordingly, the total potential force

Based on the force
Potential fields considering dynamic obstacles
When using conventional APF methods, the repulsive potential is computed solely based on the current positions of the surrounding obstacles. Consequently, such methods often fail to initiate avoidance maneuvers promptly when obstacles are in motion, thereby leading to delayed responses. The limitation becomes particularly important when the robot operates in a reduced-mobility mode, such as two-wheel mode after actuator failure, because the ability to maneuver is constrained considerably, consequently increasing the risk of collision. Similar issues arise in MPC-based multirobot path planning under environmental uncertainty, where anticipating future interactions rather than reacting only to the present configuration is essential for maintaining safe separation. 27
To address the problem posed by moving obstacles, we incorporate the one-step-ahead constant-velocity prediction of obstacle positions when refreshing the repulsive potentials. Letting k denote the current control step and letting



Path tracking using MPC
MPC formulation
We employ a discrete-time NMPC scheme for path tracking with sampling time

All inequality constraints are collected by

Also, we write the feasible sets compactly as
Control law and mode handling
The control law is the standard receding-horizon application of the optimizer as

Brief results
Under the simulation conditions presented in the Section “Simulation results,” the controller reaches the waypoints while maintaining the prescribed clearance under both nominal and degraded mobility. After a single-wheel failure and subsequent mode selection, the controller switches to two-channel actuation. Also, the tracking transients remain bounded because of the increment penalty. Average solve times remain below the sampling period, thereby satisfying real-time requirements. Detailed metrics and plots are presented in the next section.
Simulation results
The proposed NMPC was evaluated using a three-wheel omnidirectional robot. The robot had

Overview of the physical prototype of the omnidirectional mobile robot.

Functional block diagram of the MATLAB-based simulation setup.
The workspace includes five circular obstacles: two static and three dynamic that become active at
To preserve feasibility in the presence of unmodeled disturbances, the planner supplies bounded short-horizon references. Also, the NMPC enforces mode-consistent box and rate limits so that the optimization remains aligned with the reduced authority after faults. In our simulations with the proposed NMPC, no constraint violation was observed, whereas baseline variants without these components experienced collisions. Section “Simulation results” reports waypoint-tracking accuracy (root-mean-square error (RMSE) and maximum position error), path length, speed statistics (average and peak speed), peak angular velocity during avoidance, collision outcomes, and IMM mode-estimation results, together with trajectory plots.
To assess dynamic-obstacle handling, we additionally examine the effect of incorporating predicted future obstacle positions and direction-dependent repulsive weighting. Looking ahead to hardware implementation, the robot is expected to be equipped with 2D light detection and ranging and a depth camera for real-time perception of the surrounding obstacles, supporting the practical deployment of the proposed control framework.
Mobility evaluation under three-wheel control
First, the robot's performance was evaluated under normal conditions with three-wheel control. In the static obstacle scenario, the robot followed the path generated by the APF method and avoided obstacles in a stable manner, as presented in Figure 5. In the figure, the target trajectory is depicted as a dashed blue line, the actual trajectory as a solid red line, waypoints as black crosses, and static obstacles as light green circles. These visual elements are used consistently throughout the subsequent simulation result figures.

Trajectory under three-wheel control with static obstacle avoidance.
The path-tracking accuracy was quantified using the RMSE and the maximum position error, which were, respectively,
Next, we present simulation results for a scenario involving dynamic obstacles. As depicted in Figure 6, two dynamic obstacles were introduced into the environment: obstacle 1 was located initially at position
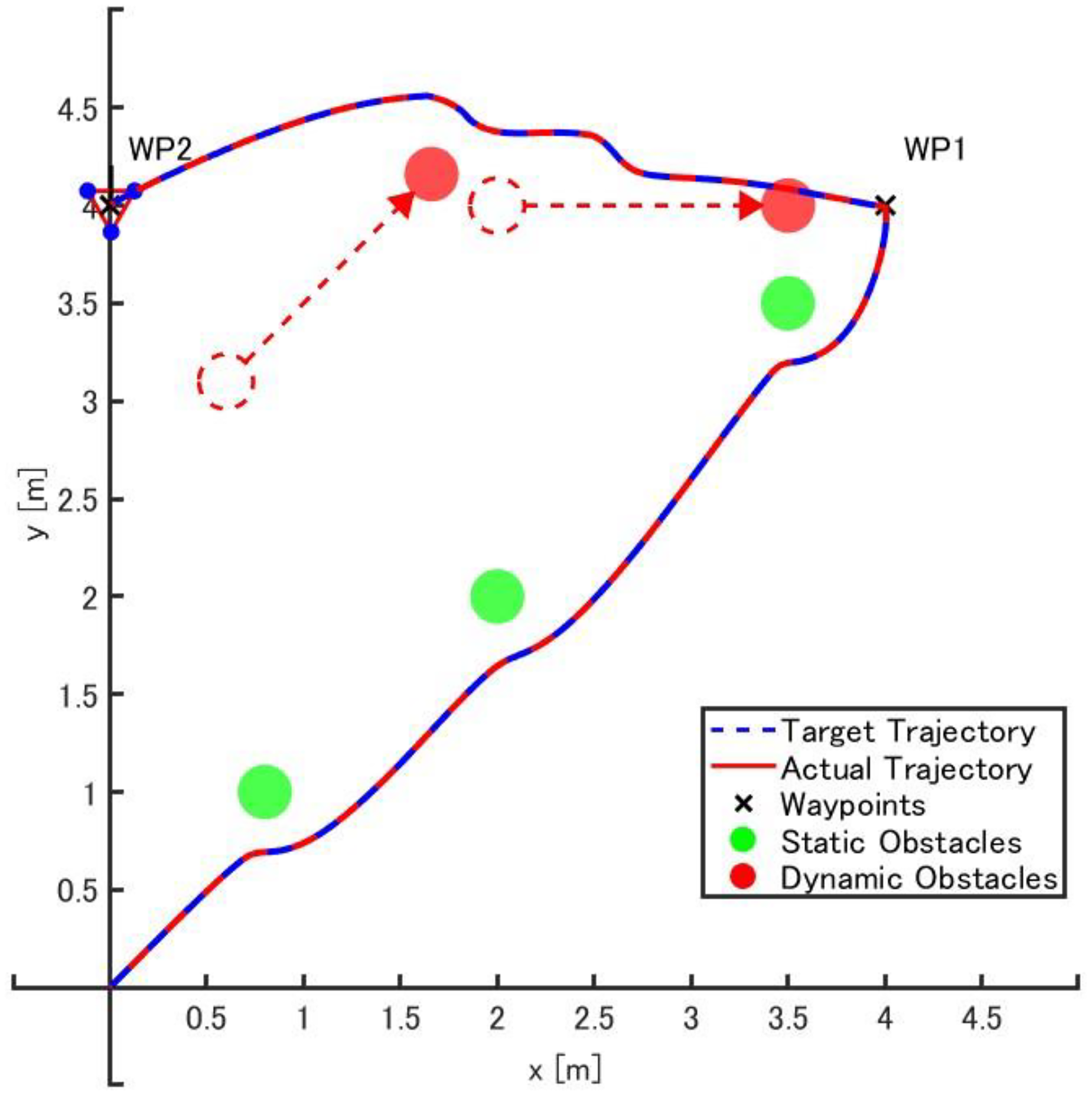
Trajectory under three-wheel control with dynamic obstacle avoidance.
As shown in Figure 6, the robot avoided both dynamic obstacles successfully and reached the goal with no collision. In the figure, the initial positions of the dynamic obstacles are denoted by red dashed circles, whereas their movement directions and distances are represented by red dashed arrows.
The final positions are shown as solid red circles at the tips of the arrows. However, the robot's trajectory overlaps with the final positions of the obstacles, making the avoidance behavior difficult to discern.
To address this limitation, Figure 7 provides a sequential illustration of the robot's behavior as it approaches and maneuvers around obstacle 2, thereby offering a clearer depiction of the avoidance process. It is noteworthy that the trajectory in this scenario initially follows the same path as that shown in Figure 5. After passing through waypoint WP1, the robot detects the approaching obstacle 2 and adjusts its path accordingly. This trajectory deviation is induced intentionally using the proposed control method, which adapts in real time based on the predicted motion of dynamic obstacles. These results demonstrate the method's effectiveness at enabling safe and smooth navigation in dynamic environments. Tracking performance was evaluated in terms of RMSE and the maximum positional error. The results yielded an RMSE of

Time-sequential behavior under three-wheel control during obstacle avoidance.
Figure 8 presents the robot's angular velocity profile during the avoidance maneuver. The peak angular velocity remained less than
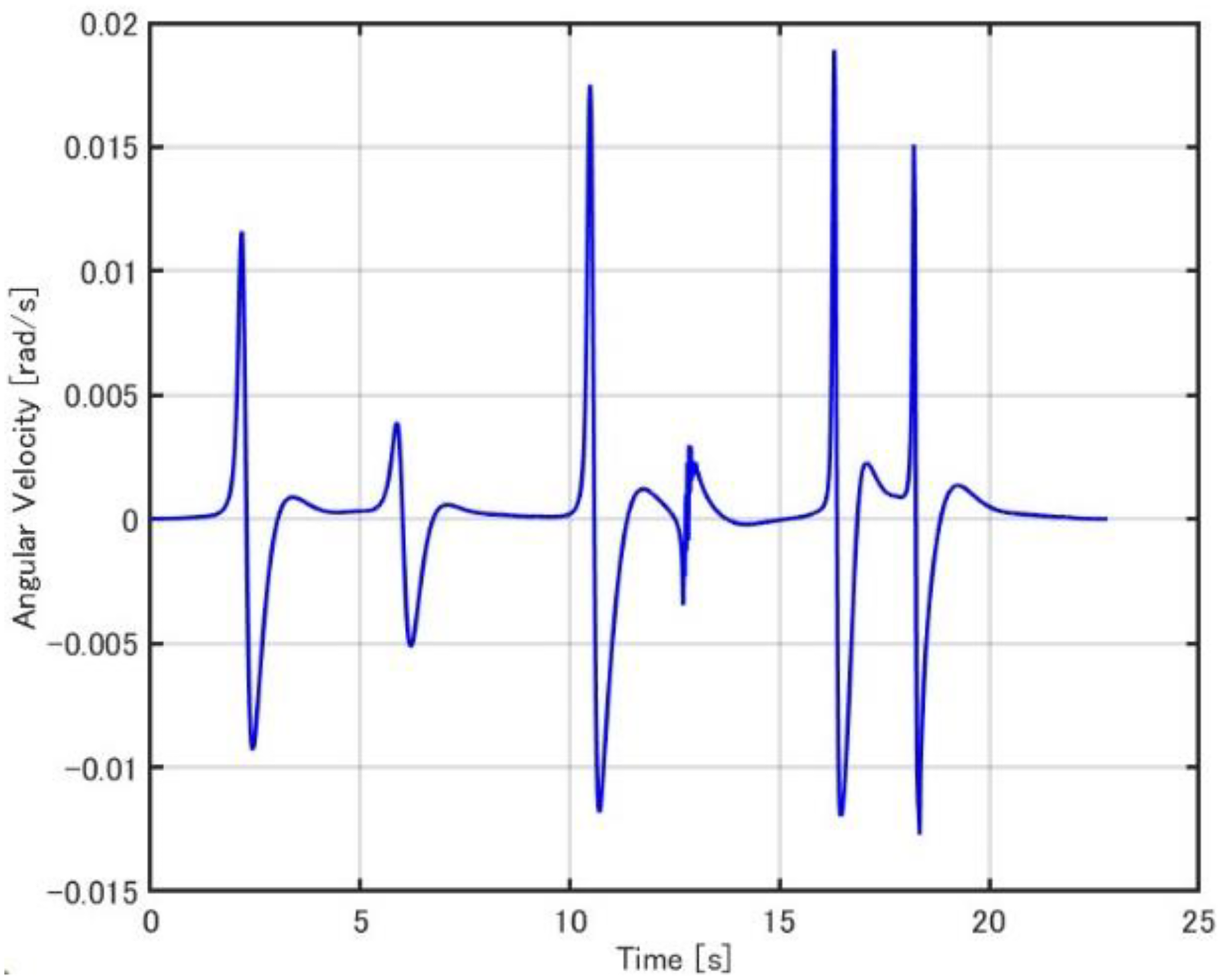
Variation of angular velocity under three-wheel control.
Finally, Figure 9 presents the mode estimation results obtained using the IMM method under dynamic obstacle conditions. This figure presents the IMM framework's capability to identify the system mode in response to actuator failure. The initial mode probabilities were set uniformly to

Transaction of model probabilities estimated by IMM under three-wheel control. IMM: interacting multiple model.
Performance under two-wheel mode following single-wheel failure
This section evaluates the robot's mobility performance after single-wheel failure and transition to two-wheel mode. Particular attention is devoted to changes in turning behavior, effects of actuator failure on control performance, and the effectiveness of direction-dependent repulsion enhancement under constrained mobility. In this scenario, wheel 1 is assumed to be faulty from the start of the operation, receiving velocity commands but producing no actual rotation.
As Figure 10 shows, the robot deviated from the nominal path immediately after the start and failed to proceed directly toward the first waypoint (WP1). This behavior contrasts with the trajectory depicted in Figure 5, where all actuators are functional and where the robot follows the planned path through WP1. After the fault was detected, the control mode transitioned to two-wheel operation. The robot continued its motion and avoided the obstacles successfully.
Trajectory under two-wheel mode with dynamic obstacle avoidance.
Compared to the three-wheel control scenario, the two-wheel mode case exhibited more pronounced turning behavior and reduced motion smoothness underestimation conditions. These differences in features are attributed to the fewer degrees of freedom in the two-wheel configuration, which necessitate larger path adjustments during obstacle avoidance.
Figures 11 and 12 present the dynamic responses of the robot under two-wheel mode following the actuator failure in wheel 1. Figure 11 portrays the time-series velocity profiles of all three wheels during the entire simulation. Wheel 1 remains at zero velocity because of the actuator fault, whereas the remaining two wheels exhibit frequent and abrupt velocity changes, including sign reversals, to compensate for the lost actuation capability. These fluctuations highlight the increased burden placed on the functioning wheels because the system dynamically reallocates effort to maintain overall mobility despite the reduced degrees of freedom.
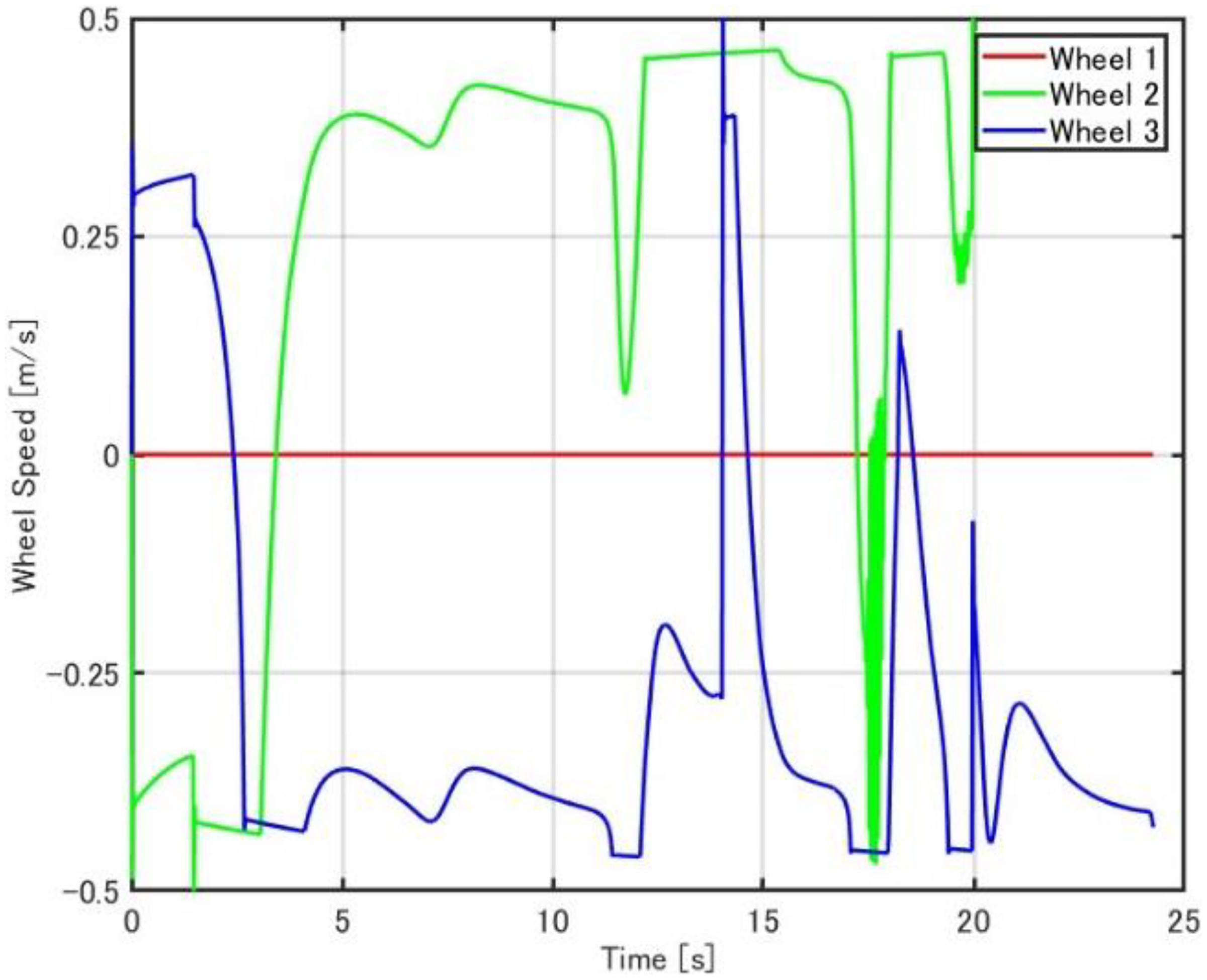
Wheel velocity profiles under three-wheel control with dynamic obstacle avoidance.

Variation of angular velocity under two-wheel mode.
Figure 12 presents the angular velocity profile of the robot's center of mass, which peaks at approximately
Figure 13 presents a time-sequential visualization of the robot's behavior under two-wheel mode, in a format similar to Figure 7, which depicted the avoidance process under three-wheel control. Following the actuator failure in wheel 1, the robot approaches and avoids obstacle 2. Compared to Figure 7, the trajectory in Figure 13 shows more abrupt directional changes, reflecting the reduced maneuverability caused by the loss of one actuator. Despite this reduced maneuverability, the figure demonstrates that the proposed method enables successful obstacle avoidance, albeit with reduced motion smoothness.
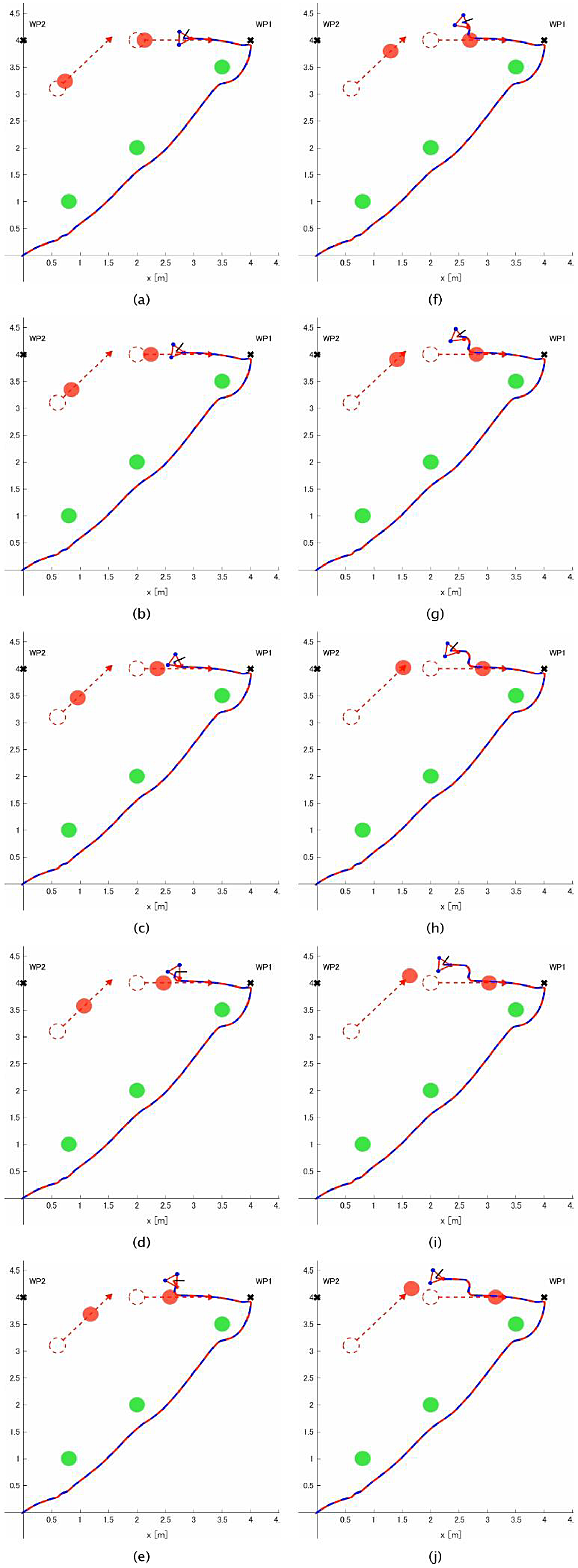
Time-sequential behavior under two-wheel mode during obstacle avoidance.
Figure 14 shows the mode probability transitions estimated using the IMM framework during a single-wheel failure scenario. For this study, a fault is considered to be diagnosed when the corresponding mode probability exceeds

Transaction of model probabilities estimated by IMM under two-wheel mode. IMM: interacting multiple model.
This consistency is attributed to the control strategy, which uniformly assigns the failed wheel to the rear, thereby enabling continued operation by the two remaining functional front wheels. As a result of this unified control architecture, comparable mobility performance was achieved across all fault scenarios, demonstrating the robustness and adaptability of the proposed fault-tolerant control approach.
Evaluation of dynamic obstacle avoidance
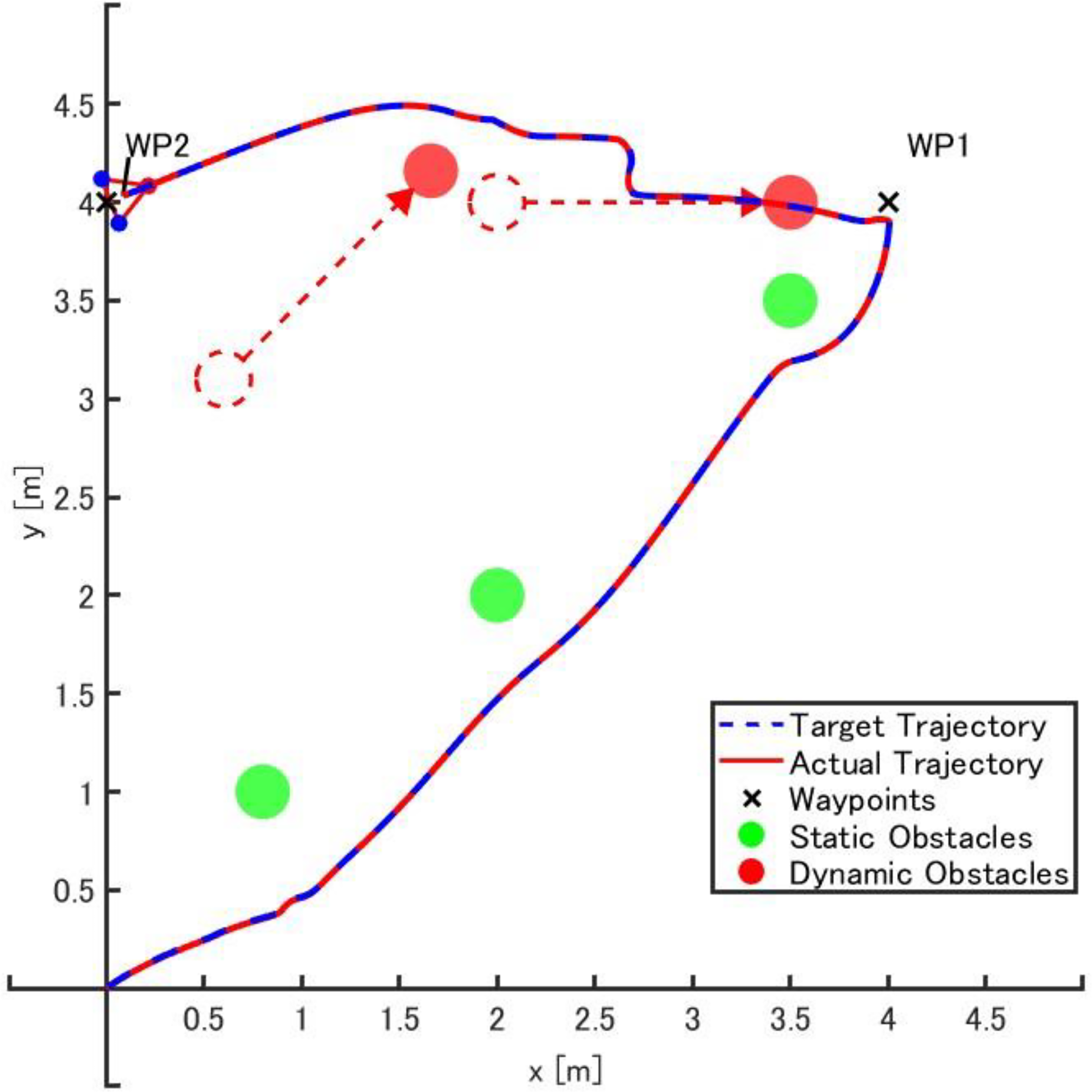
Figure 15 presents the trajectory produced when the future positions of dynamic obstacles were not considered during path planning. In this scenario, the MPC reference trajectory was generated based solely on the current positions of the obstacles, with the influence range

Trajectory under two-wheel mode without obstacle motion prediction.
Because the outcome in Figure 15 is not intuitively clear from the static trajectory alone, Figure 16 provides a time-sequential visualization of the robot's behavior under the same conditions. In contrast to the successful avoidance shown in Figure 13, the robot in Figure 16 reacts too late to obstacle 2. It is unable to complete the avoidance maneuver in time, which leads to a collision. The sequence reveals a delayed turning response compared to Figure 13, clearly illustrating the limitations of planning based only on current obstacle positions.

Collision outcome attributable to delayed avoidance under planning without obstacle trajectory prediction.
This comparison further emphasizes the necessity of considering future obstacle movements to enable timely and effective avoidance. The time-sequential plots further reflect that purely reactive planning can violate NMPC feasibility under reduced lateral authority, whereas prediction-aware references preserve feasibility by initiating avoidance earlier.
Figure 17 shows the trajectory obtained when the asymmetric repulsive enhancement based on the robot's heading was not applied. In this scenario, the robot attempted to avoid obstacle 2 by moving backward, but it ultimately failed to prevent a collision. This failure is attributed to the symmetric nature of the repulsive potential field, which lacked directional bias and which therefore did not guide the robot toward a suitable avoidance path effectively. Furthermore, the reduced relative velocity between the robot and the obstacle during backward motion limited the robot's ability to complete the avoidance maneuver with the MPC predictive horizon, further contributing to the collision. This failure mode is precisely what the proposed direction-dependent repulsion is designed to avoid: by biasing the field along the heading, the planner triggers earlier, forward-favorable evasive motion that is compatible with the NMPC horizon.

Trajectory under two-wheel mode without asymmetric repulsion enhancement.
To illustrate this behavior better, Figure 18 provides a time-sequential visualization of the robot's motion at the time of collision. As demonstrated, the robot attempts to retreat from obstacle 2. However, the absence of directional repulsion engenders hesitation in its response, leading to insufficient clearance. The contrast with successful avoidance scenarios further emphasizes the necessity of introducing directional bias into the repulsive potential to enable timely and effective obstacle avoidance. For our simulations, we keep
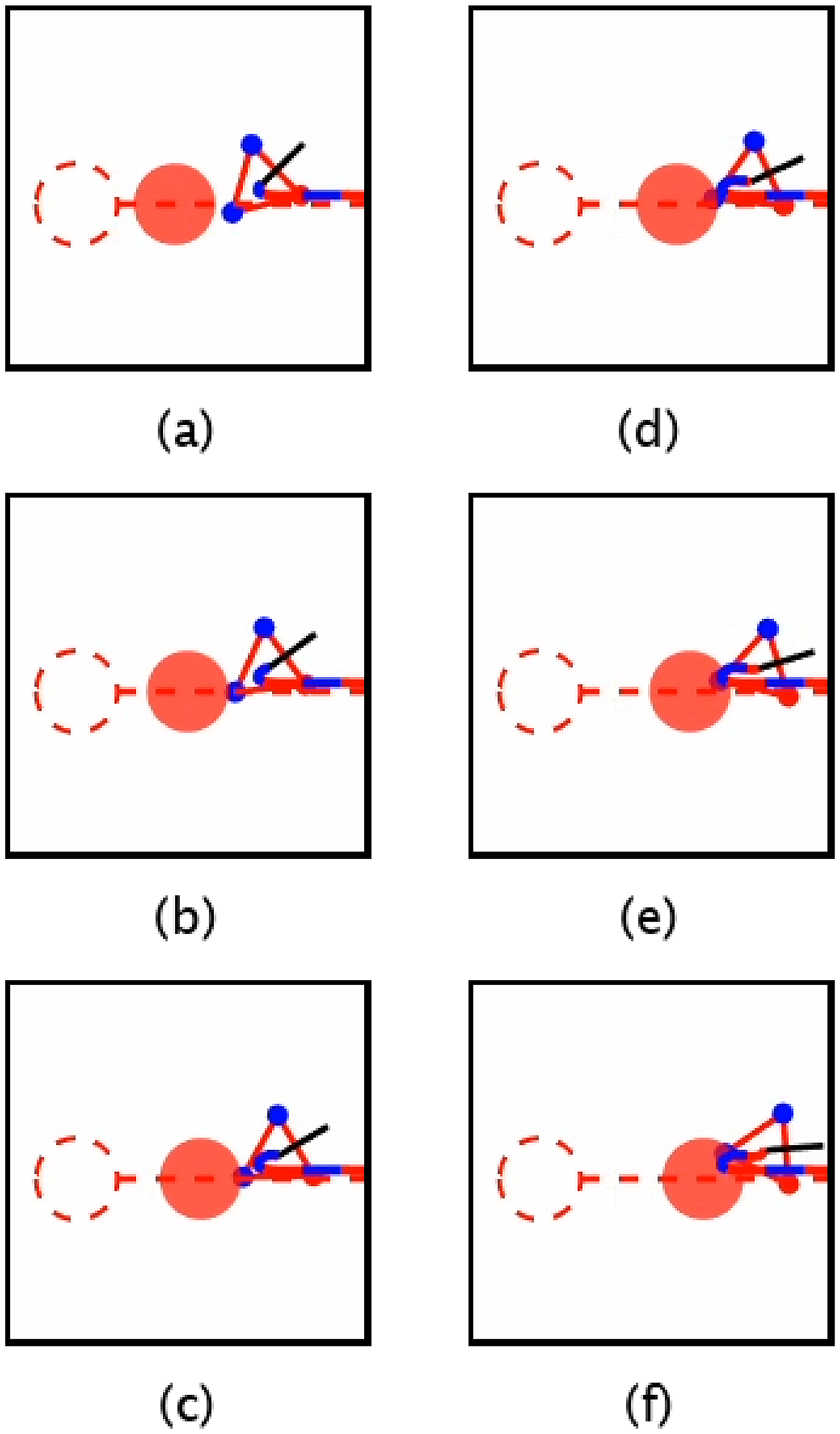
Collision outcome attributable to delayed avoidance under planning without asymmetric repulsion enhancement.
Conclusion
This study presented an adaptive control framework for a three-wheeled omnidirectional mobile robot to ensure reliable navigation in the event of a single-wheel actuator failure. The proposed method enables seamless switching to a two-wheel non-holonomic model and applies MPC to ensure continued trajectory tracking.
To enhance navigation robustness under fault conditions, the conventional potential field method was extended by incorporating the predicted future positions of dynamic obstacles and by applying direction-dependent asymmetric repulsion. The effectiveness of the proposed approach was validated through comprehensive simulation experiments.
Simulation results demonstrated that, under normal conditions, the robot employing three-wheel control tracked the reference trajectory accurately while avoiding both static and dynamic obstacles. After an actuator failure, the robot maintained trajectory tracking successfully using the proposed two-wheel MPC strategy. Although reduced maneuverability led to increased turning effort and a noticeable but acceptable reduction in trajectory smoothness, overall navigation stability was maintained. Furthermore, the results indicated that neglecting the predicted motion of dynamic obstacles might lead to collisions, which underscores the importance of predictive planning in dynamic environments. By contrast, the proposed asymmetric repulsive potential facilitated earlier and more effective avoidance maneuvers by prioritizing repulsion in the robot's forward direction, thereby contributing to improved safety and reliability in navigation.
As future research, the proposed control method will be implemented on a physical robot to evaluate its real-world applicability and robustness under diverse environmental and fault scenarios. Additional research will specifically examine improvement of the accuracy of dynamic obstacle trajectory prediction and optimizing control performance under constrained mobility conditions, with the goal of developing a highly reliable and adaptable mobile robotic system.
Footnotes
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.