
Abstract
In multiple-input multiple-output–orthogonal frequency-division multiplexing underwater acoustic communication systems, the correlation of the sampling matrix is the key of the channel estimation algorithm based on compressed sensing. To reduce the cross-correlation of the sampling matrix and improve the channel estimation performance, a pilot design algorithm for co-sparse channel estimation based on compressed sensing is proposed in this article. Based on the time-domain correlation of the channel, the channel estimation is modeled as a common sparse signal reconstruction problem. When replacing each pilot indices position, the algorithm selects multiple pilot indices with the least cross-correlation from the alternative positions to replace the current pilot indices position, and it uses the inner and outer two-layer loops to realize the bit-by-bit optimal replacement of the pilot. The simulation results show that the channel estimation mean squared error of pilot design algorithm for co-sparse channel estimation based on compressed sensing can be reduced by approximately 18 dB compared with the least square algorithm. Compared with the genetic algorithm and search space size methods, the structural sequence search proposed by pilot design algorithm for co-sparse channel estimation based on compressed sensing is used to design the pilot to complete the channel estimation. Thus, the mean squared error of the channel estimation can be reduced by 2 dB. At the same bit error rate of 0.03, the signal-to-noise ratio can be decreased by approximately 7 dB.
Keywords
Introduction
There are many problems in the ocean channel, such as a strong multipath effect and narrow available bandwidth.1–3 The single carrier modulation of an underwater acoustic (UWA) communication system has difficulties meeting the communication requirements for a high transmission rate. Multiple-input multiple-output (MIMO)–orthogonal frequency-division multiplexing (OFDM) technology based on multi-input and multi-output has the advantages of multi-carrier high-frequency spectrum utilization and can effectively suppress the multi-path interference caused by the UWA channel. 4 Therefore, multiple-input multiple-output (MIMO) technology has attracted great attention in the underwater communications field. 5
The CSI (Channel State Information) acquisition, namely, channel estimation, is one of the key technologies in MIMO–OFDM UWA communication system. In an MIMO UWA system, in order to achieve stable communication between the receiver and the transmitter, the receiver must accurately obtain the CSI to eliminate the influence of the channel on the transmission signal and realize the correct demodulation of the receiver.6,7 The accuracy of CSI has an important influence on beamforming, signal detection, signal decoding, channel equalization, and so on. 8 Therefore, channel estimation, or the acquisition of CSI, is one of the key technologies in MIMO–OFDM UWA communication. For the channel estimation method using a training sequence, the pilot cost increases linearly as the number of antennas increases, which reduces the transmission rate and the advantages of an MIMO system. Therefore, how to accurately estimate the channel with fewer pilots becomes a challenge in an MIMO–OFDM system. At present, although there are many traditional methods to obtain CSI, these methods need a large pilot cost to accurately estimate the channel. 9
Compressed sensing (CS) algorithm has been widely used in sparse channel estimation. In recent years, Candes et al.10,11 proposed a CS theory that can reconstruct the original sparse signal with the high probability sparse signal. The theory showed that the original sparse signal can be reconstructed with the high probability sparse signal using the CS method, in which the measurement value of a sparse signal is far lower than the original signal dimension. CS technology is widely used for sparse channel estimation. Compared with traditional channel estimation methods such as the least square (LS), the minimum mean square error (MMSE), and so on, CS methods, such as the orthogonal matching pursuit (OMP) and the basis pursuit (BP), can reconstruct the sparse channel with a high probability with only a few pilots, which greatly reduces the pilot cost. 12
In an MIMO–OFDM UWA communication system, regarding the correlation of continuous time channels, it can be considered that the same non-zero tap position of the channel is only the difference of the channel fading coefficient, which is named the common sparsity. Therefore, we can use the common sparsity of a UWA channel to reconstruct the common sparsity channel and obtain better channel estimation performance than channel reconstruction alone. 13 In addition, different from the traditional channel estimation method, the uniform pilot distribution achieves the optimal channel estimation performance, and the channel estimation performance of the CS algorithm depends on the cross-correlation of the sampling matrix. The smaller the correlation of the sampling matrix is, the better the reconstruction performance of the CS algorithm. To improve the sparse channel estimation performance, it is necessary to design the sampling matrix. In Choi et al., 14 it is proposed that the smaller the cross-correlation of the sampling matrix is, the better the channel estimation algorithm based on the pilot design. However, this method in land cannot directly applied into the UWA communication. The main reason is that in the above estimation channel algorithm, the pilot of each antenna is pseudorandomly generated and it varies with the orthogonal frequency-division multiplexing (OFDM) symbols. The pseudorandomly generated pilot will cause the sampling matrix to have greater cross-correlation and then reduce the channel estimation performance. Furthermore, the pseudorandomly generated pilot will increase the search time to obtain the pilot position, which is not suitable for UWA communication. In UWA communication, there are several challenges, such as limited power due to the inability to recharge, time–frequency–space variations in the underwater channel, and a lower transmission rate underwater than on land. Thus, the pilot algorithm for land is directly used for underwater. In other words, it is impracticable in real underwater MIMO–OFDM due to the huge amount of computations caused by the large number of system subcarriers and pilot symbols.
Related work
In the past few years, the pilot design algorithm based on CS has been studied. In Yun et al., 15 the problem of pilot design in an MIMO–OFDM system is studied and a genetic algorithm (GA) is proposed to search for pilots. In this article, the common sparse channel reconstruction of multiple antennas is considered. The running time of the GA is difficult to control and the performance of the algorithm is greatly affected by the parameter settings of the algorithm. The pilot design depends on a better pilot search algorithm. In reference 16 an extended scheme based on a statistical random search is proposed to search for multiple antenna pilots; however, the number of pilot combinations considered in this method is limited by the pilot position replacement method.
Due to the sparsity of the UWA channel, the pilot design method based on CS is also suitable for the underwater environment. The typical representatives of these algorithms include the GA, 17 particle swarm optimization (PSO), 18 artificial bee colony (ABC), 19 bat-inspired algorithm (BA), 20 gray wolf optimizer (GWO), 21 and the more recent whale optimization algorithm (WOA). 22 However, almost all these studies are based on an LS algorithm that minimizes the estimation error of the mean squared error (MSE) criterion. Inevitably, these algorithms do not make full use of the significant sparsity of UWA multi-path channels to improve the spectral efficiency of the communication system. In addition, the aforementioned methods may suffer from difficulties related to the convergence time and convergence accuracy when searching the optimal pilot allocation. Considering the underwater communication conditions, such as limited power, the complexity of the underwater channel, and the low transmission rate, the pilot design algorithm cannot be too large and the pilot position needs to be fixed and then can be meet the requirements the amount of calculations. Therefore, it is necessary to optimize the pilot position to improve the bandwidth utilization. In view of the characteristics of the UWA channel, in order to reduce the search speed and convergence in the pilot design, this article proposes a pilot design algorithm for co-sparse channel estimation based on compressed sensing (PDACS) algorithm.
Our contribution
As stated previously, the design of the underwater pilot based on CS has been studied to some extent. However, it is still rare to find studies that improve the channel estimation performance by reducing the cross-correlation of the sampling matrix. To improve the channel estimation performance and reduce the pilot cost, the pilot is designed to reduce the cross-correlation of the sampling matrix:
To reduce the complexity of the design and calculation of the underwater pilot and the randomness of the pilot selection, this article proposes a method to optimize the fixed pilot placement in the pilot selection process.
According to the common sparsity of an MIMO–OFDM UWA channel, this article constructs a common sparsity signal sampling matrix, taking the correlation of the sampling matrix as the objective function. By reducing the cross-correlation of the sampling matrix, the probability of signal reconstruction is improved.
To optimize the cross-correlation of the sampling matrix, the tree structure sequence replacement search algorithm is proposed to solve the multi-antenna pilot. Compared with the GA, the tree structure sequence method is less affected by the random selection of parameters, the convergence time is guaranteed, and the cross-correlation of the sampling matrix is at its minimum.
According to the simulation, the PDACS algorithm is verified to have a better optimization capability than other algorithms. Regarding the channel estimation performance, the robustness and effectiveness of the proposed PDACS algorithm are demonstrated by maintaining consistently superior performance with respect to the bit error rate (BER) and MSE for different system subcarriers and channel models. In addition, simulation results confirm that our proposal retains almost the same computational complexity but yields better convergence performance than the GA, PSO, and LS-based methods in optimizing pilot allocations.
The remaining portion of this article is organized as follows. In section “System model,” the MIMO–OFDM underwater system model is described briefly. In section “Pilot design algorithms,” the pilot design algorithm is presented in detail. In section “Simulation result and analysis,” the simulations and results of the considered methods are given and analyzed. Finally, section “Conclusion” is devoted to the conclusions.
System model
For the MIMO–OFDM UWA communication system with one transmitting antenna and one receiving antenna, it is assumed that the channel between each pair of transmitting antennas is a frequency selective channel and the coherence time of the channel is longer than the duration of the OFDM symbol, that is, the channel is a quasi-static channel, and the channel impulse response is constant in one OFDM symbol period.
It is assumed that the OFDM symbols contain subcarriers, in which the numbers of data subcarriers and pilot subcarriers are

where
To estimate the channel impulse response, the received pilot is extracted from the received signal. Now, considering the channel estimation of the iRth receiving antenna, let the pilot vector received by the iRth user and transmitted by the iTth antenna be

where

Then, equation (2) can be expressed as follows

Considering the continuous s-correlation channels of the iTth transmitting antenna and the iRth receiving antenna, the subscript

To use the common sparse CS algorithm, vector

where
Due to sparse vector

Pilot design algorithms
Optimized fixed pilot
In Zhu et al., 7 the smaller the restricted isometric property (RIP) is, the better the sparse signal reconstruction performance. Different pilot distributions make up different sampling matrixes, and so the pilot directly determines the channel estimation accuracy. However, there is no known method to calculate whether the given matrix satisfies the RIP. Another alternative method to evaluate the sample matrix reconstruction performance is the cross-correlation of the sample matrix, and the cross-correlation condition is better than the RIP.23,24 The theory of CS shows that the smaller the correlation of the sampling matrix is, the smaller the reconstruction deviation of a sparse signal. 24 Therefore, the pilot can be designed to reduce the cross-correlation of the sampling matrix to improve the channel estimation performance.
Equation (7) is a block sparse signal reconstruction problem. The block sparse signal reconstruction accuracy is also related to the sampling matrix.
The cross-correlation of matrix

where

The cross-correlation of the vth matrix
Because the pilot with equal amplitude and zero autocorrelation is often used in a practical system, assume that the pilot symbol modulus is equal to

Under the known

For the cosparsity channel estimation, Figure 1(a) shows the location of the pseudorandom pilot in Qi et al.
9
However, the pseudorandom pilot cannot guarantee the small cross-correlation of the sampling matrix. Therefore, in this article, a fixed pilot distribution is proposed, as shown in Figure 1(b), and the cross-correlation of the sampling matrix is reduced by the pilot design. Figure 1 shows the transmission diagram of the OFDM system, where

Pilot pattern (N = 16, NT = 3, NP =3, and s = 3): (a) random pilot and (b) fixed pilot.
Because expression (12) is a combinatorial optimization problem, the most direct method is to exhaust all possible results. However, for OFDM systems with more subcarriers, the exhaustion algorithm has too much of a computation load, and so it cannot effectively solve the pilot.
Search algorithm of tree structure order replacement
In this section, a PDACS algorithm is proposed to search for the suboptimal pilot position. The algorithm consists of three steps: initialization, obtaining a single antenna pilot, and result output.
Step 1 initialization: the number of external cycles is
Step 2 obtaining a single antenna pilot: for Set In the The pilot to be optimized in this step is After
Step 3 result output: output the pilot
The key of the above algorithm is step (3) in step 2. In the bit-by-bit optimization process, the first node only generates
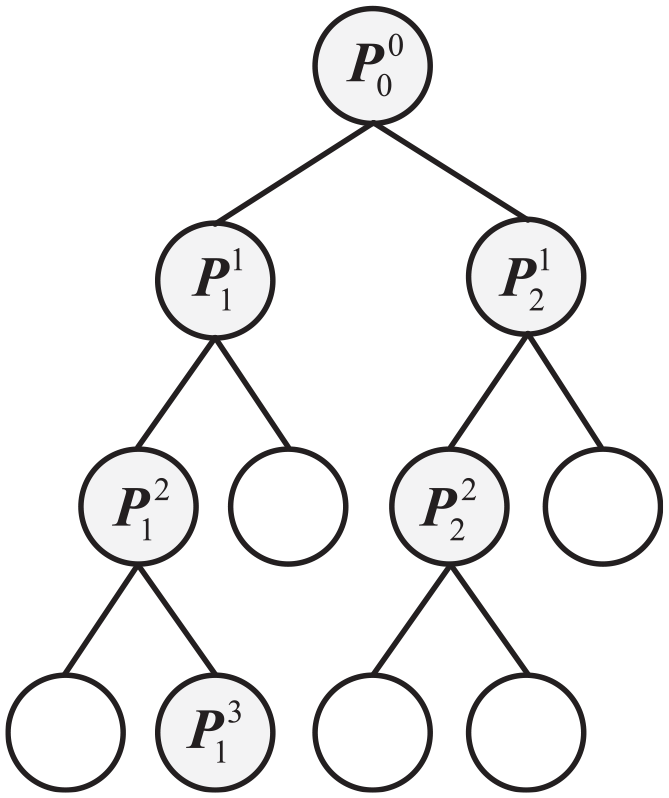
Schematic diagram of node selection.
Simulation result and analysis
To simulate the authenticity of an underwater communication environment, the BELLHOP ray model is applied to establish the multi-path channel of real ocean data. As shown in Figure 3(a), the latitude and longitude coordinates of the ocean area are 20.373 and 113.875, respectively; the SSP (sound speed profile), seafloor, and sea surface refraction and scattering are as shown. The transmitter and the receiver are placed in a water area with a depth of 100 m. They are placed at a distance 1000 m apart and a depth of 30 m. According to the parameters in Jiang et al., 16 when the sound velocity changes from 1540 m/s on the water surface to 1512 m/s on the water bottom, the SSP is as shown in Figure 3(b). After all, these environmental profiles are input to BELLHOP model, and it produces a variety of useful outputs such as the transmission loss, the arrival time-series and amplitudes, and so on. Figure 3(c) predicts the transmission loss with respect to different depths and ranges. In Figure 3(d), the CIR (Channel Impulse Response) is clustered by six taps with dominated powers at the receiver.
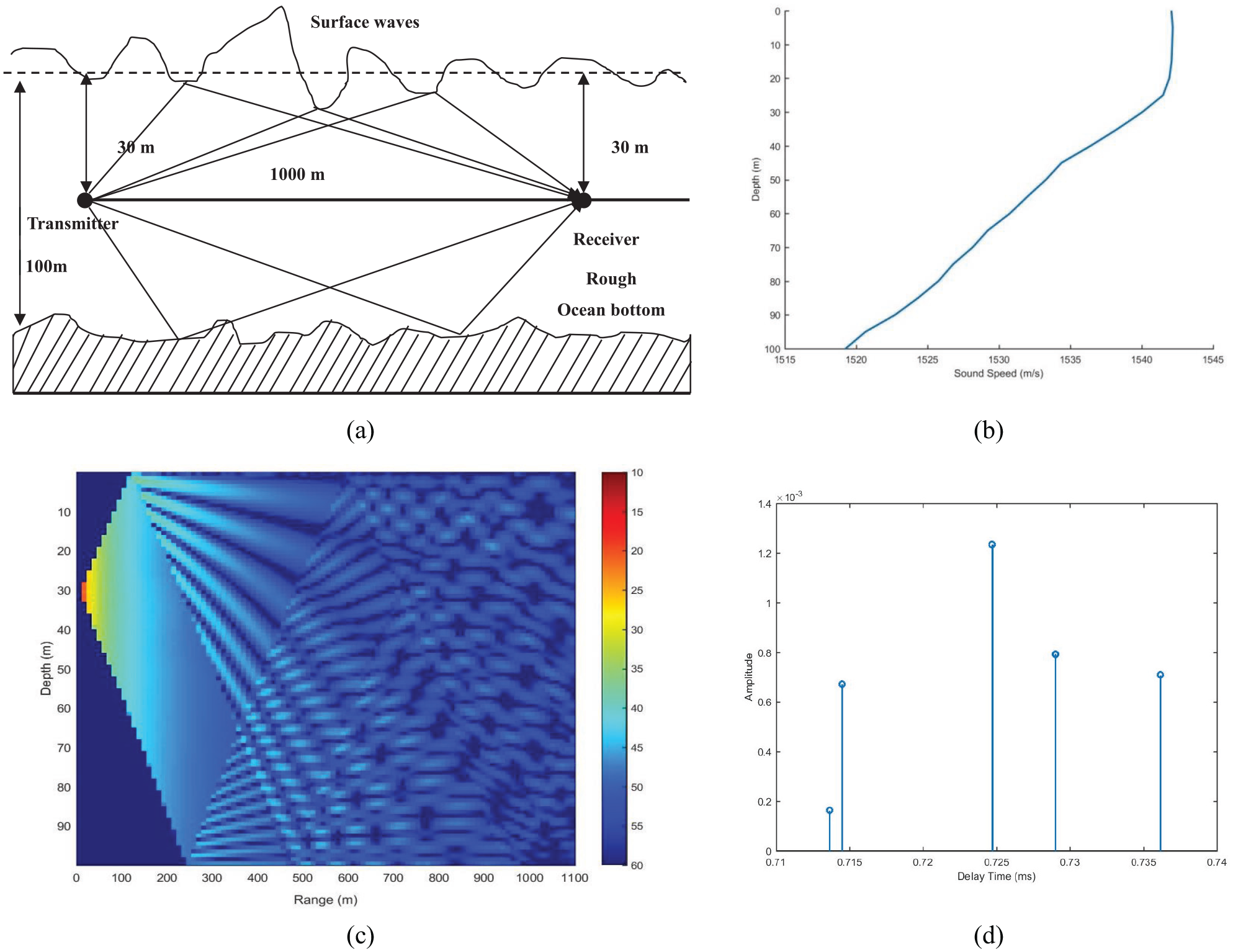
BELLHOP ray model of a UWA multi-path channel. (a) Schematic diagram of ray propagation. (b) Measured SSP values versus the depths. (c) Predicted transmission loss versus the depths and ranges with the source at a depth of 30 m. (d) Deterministic CIR for a multi-path sparse channel.
Assume that the subcarrier in the OFDM symbol is

(a) Comparison of pilot searching algorithms (N = 256). (b) Comparison of pilot searching algorithms (N = 512).
The underwater MIMO with N = 256 subcarriers is simulated to verify the cross-correlation sum of various pilot allocation methods, as shown in Figure 4(b). As with the simulation of N = 512 subcarriers, the cross-correlation sum of N = 256 in the PDACS algorithm is better than that of other algorithms. The reason is as mentioned above.
To verify the performance of the proposed optimized pilot time-domain correlation channel estimation, this article compares the four pilot schemes, including the LS, GA, SSS and PDACS algorithm, using the channel estimation MSE and BER. In the simulation, the sparse channel is randomly generated, the non-zero tap position of the channel is uniformly distributed, and the non-zero fading coefficient is normally distributed as

The simulation sets the number of time-domain correlation channels as 2, each SNR is simulated 600 times, and zero forcing equalization detection is adopted. The BERs are as shown in the figure, where Figure 5(a) is the BER with 256 subcarriers, and Figure 5(b) is the BER of 512 subcarriers. The simulations show that the BER of the proposed PDACS algorithm outperforms the LS, GA, and SSS with a lower BER when the maximum SNR is reached. SSS follows the PDACS, and GA is inferior to SSS but superior to LS. The pilot design method in this article has a smaller channel estimation error rate, and as the SNR increases, the performance advantage of the PDACS in this article is increasingly more obvious. When the SNR is 30 dB, the SNR is reduced by approximately 2.3 dB, and when the same 0.03 error rate is achieved, the SNR is approximately 7 dB lower. This is because the sampling matrix obtained by the proposed PDACS in this article has a smaller cross-correlation. The distance of the different sparse signals in measurement space is ensured, and the sparse channel can be estimated more accurately. The simulation shows that the traditional LS channel estimation method cannot accurately get the channel because of the small number of pilots. Compared with the SSS and GA, the proposed PDACS algorithm uses a method with a fixed pilot position and tree search, and so it has less cross-correlation and achieves a low channel estimation error rate. When the number of pilot subcarriers is 256, the proposed PDACS algorithm has the lowest BER, as shown in Figure 5(a).

(a) Mean squared error versus SNR (N = 256, NP = 14, and L = 60). (b) Mean squared error versus SNR (N = 512, NP = 14, and L = 60).
As shown in Figure 6(a) and (b), respectively, as the number of subcarriers changes from 256 to 512, the maximum MSE gain of the proposed PDACS algorithm in this article is 18 dB.

(a) Bit error rate versus SNR (N = 256, NP = 14, and L = 60). (b) Bit error rate versus SNR (N = 512, NP = 14, and L = 60).
Considering the pilot cost, the proposed PDACS algorithm in this article has a smaller channel estimation BER and MSE. Therefore, under the condition of requiring the same channel estimation performance, compared with the LS, GA and SSS, the method proposed in this article can further reduce the pilot cost and reduce the complexity, energy loss and hardware cost of the receiver and transmitter design.
Conclusion
In this article, time-domain correlation channel estimation based on CS in an underwater MIMO system is studied. To solve the problem of poor sparse signal reconstruction performance caused by the random distribution of pilots, an optimized fixed pilot distribution and pilot design are proposed. Based on the CS theory, a common sparse channel sampling matrix is constructed, To minimize the cross-correlation sum, a tree structure sequential replacement search algorithm is proposed to solve the pilot position. The simulation results show that compared with the LS algorithm, the proposed PDACS algorithm can obtain an 18-dB channel MSE gain at most. Compared with the LS, GA, and SSS algorithms, when the SNR is 30 dB, the SNR is reduced by approximately 2.3 dB, and when the BER is 0.03, the SNR is reduced by approximately 7 dB.
Footnotes
Handling Editor: Lyudmila Mihaylova
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported, in part, by the following projects: the National Natural Science Foundation of China through the grants 61861014, the Guangxi Nature Science Fund (2015GXNSF AA139298 and 2016GXNSFAA380226), the Guangxi University high-level innovation team and outstanding scholar program, the Guangxi Science and Technology Project (AC16380094, AA17204086, and 1598008-29), the Guangxi Nature Science Fund Key Project (2016 GXNSFDA380031), and the Guangxi University Science Research Project (ZD 2014146).