This article focuses on the evaluation of geometric dilution of precision for three-dimensional angle-of-arrival target localization in wireless sensor networks. We calculate a general analytical expression for the geometric dilution of precision for three-dimensional angle-of-arrival target localization. Unlike the existing works in the literature, in this article, no assumptions are made regarding the observation ranges, noise variances, or the number of sensors in the derivation of the geometric dilution of precision. Necessary and sufficient conditions regarding the existence of geometric dilution of precision are also derived, which can be readily used to evaluate the observability of three-dimensional angle-of-arrival target localization in wireless sensor networks. Moreover, a concise procedure is also presented to calculate the geometric dilution of precision when it exists. Finally, several examples are used to illustrate our results, and it is shown that the performance of the proposed regular deployment configurations of angle-of-arrival sensors is better than the one with random deployment patterns.
Target localization plays an important role for many applications in both military and civilian fields.1 A typical application is the global navigation satellite system (GNSS), which can provide autonomous geo-spatial positioning with global coverage and allow small electronic receivers to obtain their locations to high precision using time signals transmitted along a line-of-sight (LOS) by radio from satellites.2,3 Another emerging application is indoor target localization. To promote market adoption for indoor localization systems, the definition of benchmarking methodologies, common evaluation criteria, standardized methodologies useful to developers, testers, and end users was first proposed,4 and then an attempt to define what is next for indoor localization systems was also performed.5 For indoor and outdoor target localization, the most popular topics of target localization are all involved in the performance measure of accuracy and the corresponding localization algorithm. In this article, we are only interested in the performance measure for three-dimensional (3D) passive target localization using angle-of-arrival (AOA) sensors via a wireless sensor network (WSN).
The most used performance measures of target localization are the geometric dilution of precision (GDOP),6 the Cramér–Rao lower bound (CRLB),7 and the root mean squared (RMS) error.8,9 In many practical applications, the GDOP plays an important role for evaluating the accuracy of target localization for both two-dimensional (2D) and 3D scenarios. The concept of GDOP is first defined as the ratio of the RMS position error to the RMS ranging error,6 and subsequently, many researchers adopt RMS position error as GDOP directly.10–12 Actually, as pointed out by Zhong et al.,12 there are no essential differences between the above-mentioned two definitions. GDOP can be derived from CRLB (if it exists), while CRLB is the inverse of the Fisher information matrix (FIM) and also is the lower bound of any estimation error covariance matrix,9 which, however, can be attained by using any unbiased estimators.
In this article, we adopt the second definition of GDOP, i.e., it is defined as the trace of the CRLB. GDOP shows how the localization accuracy is affected by the sensor-target geometry and can be used to evaluate the final localization estimation.13 The specific style of GDOP for characterizing the performance measure of target localization depends primarily on the adoption of specific sensors. In WSNs, the most frequently used sensors for target localization include range-only sensors,14 AOA-based sensors,15–17 time-difference-of-arrival (TDOA)-based sensors, frequency-difference-of-arrival-based sensors,18 and so on. Since GDOP can be used to characterize the target estimate’s uncertainty, many researchers are dedicated to deriving the analytical formulas of GDOP for target localization with the above-mentioned sensors used in some specific application scenarios.19–27
Until now, most of the existing works have been concentrated on the derivation of analytical formulas of GDOP for 2D case.20–23,28,29 Indeed, there exist many application scenarios which are inherently involved in 3D space. For example, the following application scenarios, the determination of user’s location in the GNSS and the aerial target localization and tracking, are all involved in 3D. For 3D space, with the increase in the dimension of the FIM or CRLB, the derivation of GDOP for the arbitrary number of sensors becomes more challenging. To handle this problem, many works have been devoted to deriving the CRLB for the evaluation of 3D AOA target localization.16,17,27,30–32 Zhong et al.12 propose an analytical formula of GDOP for 3D bearings-only passive target localization. However, an additional assumption on the observation noise variances is needed. Huang et al.16 derive the CRLB for the AOA-assisted GNSS collaborative positioning in order to fuse information from GNSS satellites and terrestrial wireless systems. Shim et al.17 investigate the CRLB on AOA estimation of an RF lens–embedded antenna array and confirm that the CRLB of an RF lens–embedded antenna array may be better than the CRLB for a conventional uniform linear array in a certain desired range. Xu and Doğançay33 derive the formula of the FIM for 3D AOA target localization, then use it to solve the problem of optimal sensor–target geometries. The formula of CRLB for positioning with both range and AOA measurements in a 3D environment is derived by Yu,26 where the CRLB is used to evaluate positioning accuracy under realistic conditions. The theoretical limit of AOA for cooperative vehicle-to-vehicle scenario is considered in Youn et al.,27 where the theoretical limit is represented as CRLB. Noroozi and Sebt30 propose the algebraic solution for 3D TDOA/AOA localization in multiple-input-multiple-output passive radar, and the corresponding CRLB is also derived. Kazemi et al.31 and Li et al.32 are, respectively, devoted to finding the closed-form solution of estimators, and using the derived CRLB, the performance of the proposed algorithms can reach or converge to the CRLB. In Rui and Ho34 and Moreno-Salinas et al.,35 the minimization of the trace of the CRLB (i.e. GDOP) using time-of-arrival sensors and AOA sensors are considered, respectively, for 2D and/or 3D target localization. However, some restrictive assumptions are made which require that either the number of sensors is even or the observation ranges and/or noise variances are identical for the derivation of the CRLB or GDOP. Although many works have been performed on the derivation of CRLB for 3D AOA target localization, however, very few studies in the literature have considered the problem of deriving explicit expressions of GDOP for 3D AOA target localization in general application scenario.
Along with the determination of the formula of the GDOP (CRLB), the existence conditions of GDOP (CRLB) for AOA target localization have also attracted the attention of researchers. For this case, the existence conditions of GDOP are equivalent to the observability conditions for AOA-based target localization. The observability conditions for bearing-only (angles-only) target localization/tracking have been widely studied.36–39 However, most of the existing works on the observability problem have primarily focused on the scenario where only one single observer (own-ship) is used for localization or to track the target. For multiple 3D AOA sensors case in WSNs, to the best of our knowledge, the observability conditions have been rarely studied.
Motivated by the above discussions, this article is devoted to determining the explicit expression of GDOP as well as the existence conditions of GDOP for 3D AOA target localization in more general application scenarios. First, we derive the FIM for 3D AOA sensors using the measurement likelihood function according to the observation equations of azimuth and elevation angles. Then, rearranging the FIM as a special form, the Cauchy–Binet formula is adopted to derive the analytical formula of GDOP. Finally, the conditions are derived regarding the existence of the GDOP. The main contributions of this article are threefold: (1) a general analytical formula of GDOP with closed form for 3D AOA target localization is proposed, where no restrictive assumptions are needed on the number of sensors, the observation ranges and noise variances; thus, the presented formula of GDOP can be used to evaluate the accuracy of 3D AOA target localization for most general scenarios; (2) some existing works on the GDOP for 2D/3D AOA target localization can be regarded as the special case of the proposed approach, which can be directly deduced from the proposed general analytical formula of GDOP; (3) a necessary and sufficient condition for the invertibility of the FIM for 3D AOA target localization is given, which can be used to judge the existence of GDOP. Moreover, a concise procedure of evaluating the GDOP for 3D AOA target localization is presented.
The remainder of this article is organized as follows. Section “Problem formulation” gives the problem formulation of 3D AOA target localization, and the derivation of the FIM is addressed in section “Derivation of the FIM for 3D AOA sensors.” Section “Derivation of the GDOP for 3D AOA sensors” is dedicated to characterizing the generalized GDOP using explicit expression for 3D AOA target localization. Some special cases of GDOP are studied in section “Special case studies,” and then in section “Illustrative examples” several examples are illustrated and section “Conclusion” concludes the article.
Notations and definitions
The two-norm for a vector of is defined as . denotes the inner product between two vectors and . or represents the determinant of the matrix . and indicate the trace and transpose of the matrix , respectively.
Problem formulation
Consider the target localization problem of AOA sensors in 3D space using angle-only observations in WSNs. The sensor-target geometry is shown in Figure 1, where and are the mutually distinct position vectors of the target and sensor i in the Cartesian coordinate system of Oxyz, respectively, . Define as the vector of LOS from sensor i to the target, then represents the distance (range) between the target and sensor i. is the angle of LOS between the sensors i and j, and . and are the azimuth and elevation angles of LOS of the ith sensor, respectively, defined by
where is the four-quadrant arctangent and is the arcsine.
Geometric configuration of the target and sensors.
Remark 1
Note that the use of elevation and azimuth angles in 3D AOA target localization inevitably introduces discontinuities and singularities.40 If , , then the azimuth is arbitrary and undefined for 0/0 due to and in equation (1). Conventionally, for these special cases, there are two mathematical treatments:41 one is that the azimuth is designated as a fixed constant such as zero to guarantee the uniqueness of coordinates, the other is to restrict the elevation of over the interval of to avoid the indetermination of . Since the inherent singularities of the use of azimuth/elevation angular representation, these special cases are usually not considered and directly ignored in the literature.12,33,35 In this article, we also use the convention of ruling out the singular points and adopt the second treatment, and then focus on the problem of evaluating the GDOP for 3D AOA target localization with .
In practice, the AOA observations of and can be obtained directly by equipping a directional antenna or antenna array on each sensor.42 Define as the observation vector of sensor i, where and are designated as the observation values of the true angles of and , respectively, then the observation equation can be written with the compact form
where is the observation function vector and is the observation noise vector. All sensor noises are assumed to be mutually independent and identically distributed Gaussian noise sequences with mean zero and covariance , that is, . Here, is given by
where and are the observation noise variances of and , respectively. The estimation error covariance matrix of is defined by
where is the estimate of the target position vector . It is well known that the inverse of the FIM (when it exists, called the CRLB) is the lower bound of the covariance matrix 9
where is the FIM. Then the GDOP is defined as
Now the problems are formally defined as below.
Problem 1. For AOA sensors for 3D target localization in Figure 1, determine the necessary and sufficient condition of the invertibility of the FIM.
Problem 2. For AOA sensors for 3D target localization in Figure 1, if the FIM is invertible, determine the analytical explicit expression of GDOP defined in equation (7) with arbitrary observation ranges of and noise variances of and .
Derivation of the FIM for 3D AOA sensors
Define , the likelihood function with respect to is
It is readily observed that the FIM in equation (21) is a positive (semi-)definite matrix.
Derivation of the GDOP for 3D AOA sensors
Recall the definition of GDOP in equation (7). The inverse of FIM (CRLB) should be determined at first for the derivation of GDOP. If the FIM is positive definite or non-singular, then the inverse of exists, and the CRLB can be written as
where is the adjugate of , denoted as
By the definition of GDOP in equation (7), we have
The cofactor of can be determined by the minor of
where
and
Calculation of the determinant of the FIM
Recall the FIM in equation (21). Since is a symmetric matrix, represented by the product of , using the Cauchy–Binet formula,43 the determinant of can be calculated as
where
and
It is readily observed that the number of is , while the number of is . For , it follows immediately that the second term of in equation (29) does not exist.
Recall the definitions of and in equation (19). The vectors of and in equations (30) and (31) are just generated by replacing the indices i with j and k from , respectively. Similarly, the vectors of and can also be determined from the vector of . After some calculation, can be represented as
where
with . , and are generated from the definitions of and by exchanging the indices i and j, respectively, and vice versa, denoted as
In a similar fashion, is calculated as follows
where
with and . The corresponding transformations among the terms of are given by
Calculation of the cofactors of
Following the similar manner of determining the determinant of , the determinants of can also be determined by using the Cauchy–Binet formula.43 Thus, the cofactors of in equation (26) can be calculated as follows
where
Noting that the set of is defined in equation (32), the vectors of and are defined in equation (28), . and can be generated just by using j instead of i from the definitions of the vectors and , respectively.
Using equation (43) to calculate each cofactor of , then adding all of them, after some algebra, leads to
where
and
with the transformations given by
Evaluation of the GDOP
Recall the definition of GDOP in equation (7), which requires that the FIM is invertible, that is, . Now, we first give the necessary and sufficient condition of , then utilize the equivalence principle of a proposition and its contrapositive to obtain the corresponding condition of the invertibility of the FIM.
Theorem 1
For AOA sensors, if and only if the condition (i) holds; for AOA sensors, if and only if the condition (ii) holds.
i. .
ii..
where
and .
Proof
We will prove it by two steps.
(a) Sufficiency: For sensors, the term in equation (29) does not exist, . For all , if , then , resulting in ; submitting them into equation (34), it follows immediately that . In a similar fashion, if , the same result of can be achieved. Thus, , , we have , then .
For sensors, . For all , if , then , and we have . Note that exchanging the indices of i and j, or i and k, or j and k, the above two continued equalities still hold. Submitting into equation (34) and into equation (38), respectively, leads to and . Similarly, for the remaining cases, one can obtain the same results of and for each case. Thus, , , it follows immediately that and , which leads to and , and then . Therefore, the sufficient conditions (i) and (ii) are both true.
(b) Necessity: for sensors, is equivalent to the case of . According to equation (34), leads to . From , we have , which yields or for . Inserting and into by equation (35), resulting in and , respectively. Note that for and , the solutions of and are ruled out for , respectively. Similarly, by , yields and , which is equivalent to the case of . Denoting the sets of solutions to as and , and then the condition (i) is obtained.
For sensors, leads to and by equation (29). For the case of , following the procedure of sensors, the same results can be achieved as those of the condition (i). For all , yielding each term of in equation (38) equals to zero, that is
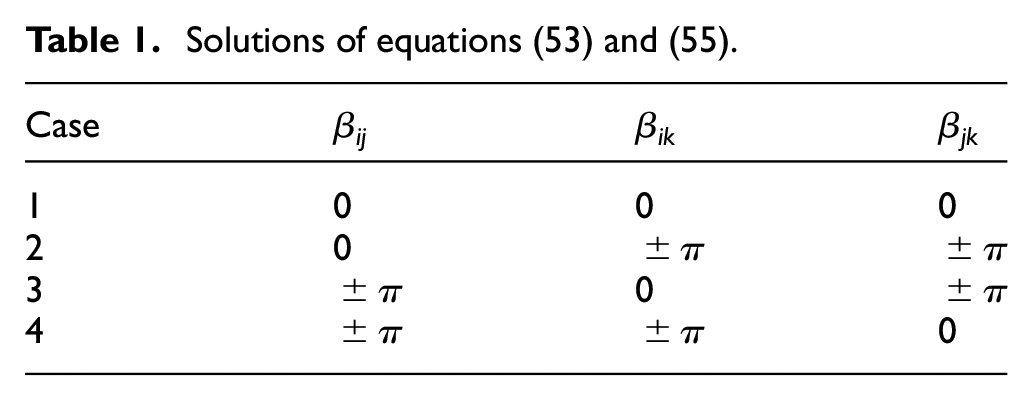
Using equations (39) and (42), noting that is equivalent to , the solutions to equations (53) and (55) are readily obtained from , that is, and . Note that any one term of and can be determined from the other two terms. Then all solutions of equations (53) and (55) are determined and listed in Table 1.
For each case in Table 1, submitting the values of and into equation (54), leads to , , and , respectively. Thus, for all , the solutions to consist of four different sets, given by
i. ;
ii. ;
iii. ;
iv. .
Recall the solutions of , that is, and , which are inherently included in the solutions of . Thus, the condition (ii) in Theorem 1 can be achieved. In combination with the analyses of (a) and (b), the proof of Theorem 1 is completed.
As previously stated, for simplicity, we use the notations of and in equation (52), and so on. From the condition (i), for sensors, it follows immediately that two sensors are collinear with the target of . For , two sensors are located at the same side with respect to the target on the line, while for , two sensors are separately located at the two sides of the line against the target. Similarly, investigating the condition (ii) for sensors, it is also shown that all sensors are collinear with the target . For each , there are two cases of sensor–target geometries: one is that three sensors are all located at the same side of the line against the target if , and the second is that two sensors are located at the same side and the remainder is located at the opposite side against the target when . Hence, we have the following corollary.
Corollary 1
The conditions of (i) and (ii) in Theorem 1 are equivalent to the single condition that all AOA sensors of are collinear with the target with .
Therefore, the alternative form of Theorem 1 can be represented as follows.
Theorem 2
For , if and only if all AOA sensors of are collinear with the target .
Proof
Using Theorem 1 and Corollary 1, the result can be readily obtained and then this completes the proof.
Since the condition in Theorem 2 is necessary and sufficient, using the equivalence principle of propositions, the contrapositive and inverse of Theorem 2 are both true, which can be represented by the following corollary.
Corollary 2
For , the FIM of is invertible, that is, , if and only if there exists at least a pair of sensors that are non-collinear with the target .
If the sensors i and j are non-collinear with the target , then and , note that is the angle of LOS between sensors i and j; thus, we have another form of Corollary 2, given as follows.
Corollary 3
For , the FIM of is invertible, that is, , if and only if there exists at least a pair of sensors such that or .
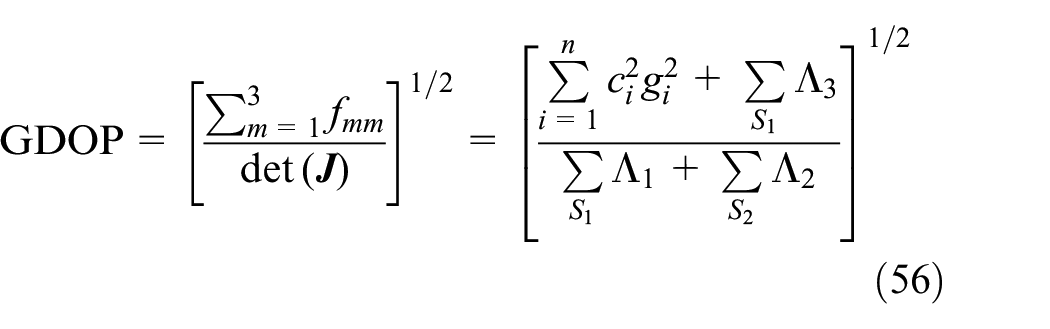
According to Corollary 2, if , the corresponding sensors i and j are non-collinear with the target , and then , and the GDOP exists for sensors in 3D AOA target localization. In this case, putting equations (29) and (46) into equation (25), then the complete closed form of the GDOP for 3D AOA sensors target localization can be obtained, given by
As noted before, for AOA sensors, the term of in equation (56) does not exist. Note that any additional assumptions are not made on the number of sensors, the observation ranges, and noise variances for the derivation of GDOP. The derived GDOP in equation (56) is a more general closed form with explicit expression.
For AOA sensors, the sets of data for calculating the GDOP are collected as below
GDOP: geometric dilution of precision; AOA: angle-of-arrival.
Special case studies
Now, in this section, we will show that, for some special cases, the formulas of GDOP for AOA target localization in some existing works can be directly deduced from the proposed formula of equation (56).
Special case:
For the case in Zhong et al.,12 the assumption is made on the observation noise variances of and for the derivation of GDOP, that is, . It is readily observed that the singular points of are ruled out for . In this case, the terms of and in equation (20) become
where is the angle of LOS between sensor i and sensor j. Using equation (58), the term in equation (34) is given by
Correspondingly, in equation (38) can be determined as
where the angles of and can be determined by the unit vectors of LOS of sensors , given by
Using the inner products among the vectors of and , one obtains
Therefore, the same results as those of Zhong et al.12 with the assumption of can be achieved.
Special case: 2D AOA target localization
Following the similar fashion of deriving the FIM for 3D case, the FIM for 2D case is given by
where
and
Using the Cauchy–Binet formula again,43 the determinant of is calculated as
Noting that , if is invertible, then we have
Thus, the GDOP for 2D AOA target localization is determined by
Actually, the GDOP for 2D AOA target localization can be directly determined from the formula of equation (56) just by removing the term of and setting , then the GDOP for 2D case becomes
Similarly, following Corollary 2 and considering equations (67) and (69), noting that there are no singularities in 2D AOA target localization for the target and sensors with distinct locations, the necessary and sufficient condition for the invertibility of the FIM (or the existence of GDOP) for 2D AOA target localization can be readily obtained, given by the following corollaries.
Corollary 4
For 2D AOA target localization, the FIM of is invertible (or the GDOP exists), if and only if there exists at least a pair of sensors that are non-collinear with the target.
Corollary 5
For 2D AOA target localization, the FIM of is invertible (or the GDOP exists), if and only if there exists at least a pair of sensors such that .
Illustrative examples
In this section, we propose some examples to illustrate the evaluation of GDOP for 3D AOA target localization with different sensor–target geometries. In addition, in practice, circular error probable (CEP) is also often used as a measure of a localization/navigation system (e.g. GPS/GNSS) precision. Here, we also use CEP to show the target localization accuracy for the following simulations.
In the considered AOA target localization scenario, the RMS of target location estimation error can attain the CRLB with any unbiased estimator. Therefore, the CEP can be approximated by the following formula44
In the following simulations, the GDOP and the approximate CEP are all calculated and provided.
It is worthwhile to point out first that, our derived results can handle the general case for sensors with different z coordinates, since the results in our work are strictly derived for the general scenario in AOA target localization, where sensors can be deployed in 3D space with different altitudes. For intuitive representation of our results, in Examples 2 and 3, all the sensors are set to be with identical z coordinates.
Example 1
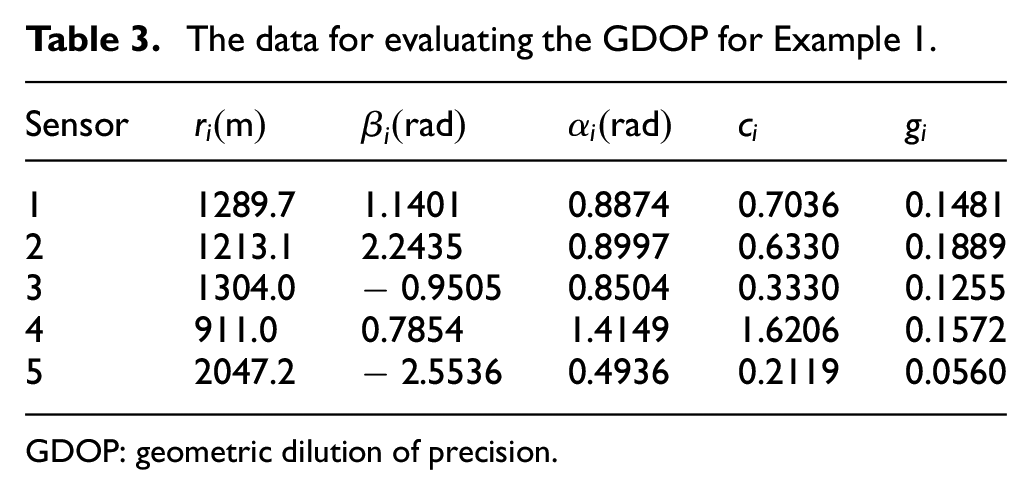
Consider AOA sensors used for 3D target localization. The location of the target is set to be , and the other simulation parameters with respect to the sensors are listed in Table 2. Note that the sensor noise variances of and can be different or identical from each other, and no restrictive assumption on the noise variances is made for the evaluation of GDOP. The sets of and including for the evaluation of GDOP are collected and listed in Table 3. The sensor–target geometry is shown in Figure 2, where the solid black squares indicate the AOA sensors, and the solid red triangles denote the target. From Table 3 and Figure 2, it is readily observed that sensors 1 and 2 are non-collinear with the target of , by Corollary 2, the FIM for this case is invertible and the GDOP exists. Using the procedure of Algorithm 1, the GDOP is readily calculated as 5.7674 m (and the approximate CEP is 4.7869 m).
The simulation parameters for Example 1.
Sensor
1
160
60
0
0.1
0.3
2
970
210
50
0.1
0.3
3
0
1500
20
0.2
0.3
4
400
700
100
0.3
0.4
5
2000
1800
30
0.1
0.5
The data for evaluating the GDOP for Example 1.
Sensor
1
1289.7
1.1401
0.8874
0.7036
0.1481
2
1213.1
2.2435
0.8997
0.6330
0.1889
3
1304.0
−0.9505
0.8504
0.3330
0.1255
4
911.0
0.7854
1.4149
1.6206
0.1572
5
2047.2
−2.5536
0.4936
0.2119
0.0560
GDOP: geometric dilution of precision.
The sensor–target geometry of Example 1 with AOA sensors.
Example 2
In this case, sensors are randomly distributed in the 3D Cartesian coordinate system of Oxyz, ranging from −2000 to 2000 m along the x-axis, −2000 to 2000 m along the y-axis and 0–500 m along the z-axis. The GDOP is evaluated on the region of for targets with a constant m height in the 3D space. The contour plot of GDOP is presented in Figure 3, and the contour map of CEP is depicted in Figure 4, where the solid white squares denote the AOA sensors. It can be readily observed that the values of GDOP are with obvious differences in different sensor–target geometries. The regions close to the center of the sensors are with a good localization accuracy of m, but the other regions with a little farther away from the center of the sensors are with relatively high values of GDOP, especially the lower left one in Figure 3, where the values of GDOP increase rapidly.
The simulation parameters for Example 2.
Sensor
1
−462
1931
409
0.2
0.3
2
332
921
130
0.1
0.3
3
−993
−624
297
0.2
0.1
4
−838
336
11
0.3
0.3
5
468
−1569
213
0.3
0.3
6
−939
1625
156
0.2
0.5
7
1298
1519
81
0.1
0.2
The contours of GDOP for Example 2.
The contours of CEP for Example 2.
Example 3
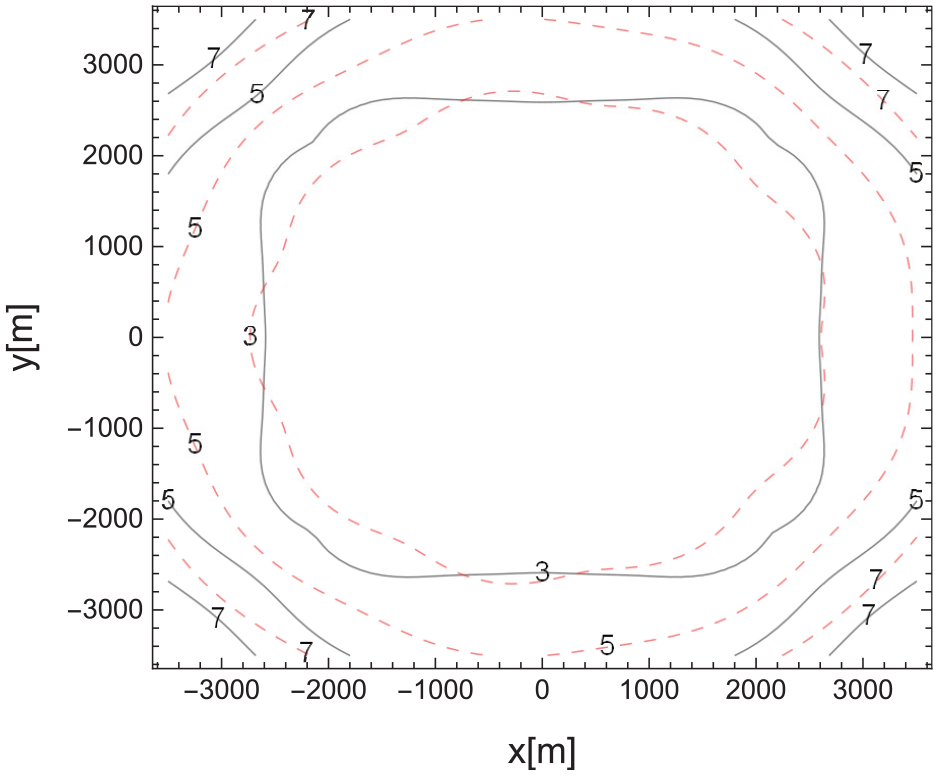
In this case, we consider two regular configurations for the deployment of AOA sensors. The first is that the AOA sensors are evenly spaced in a rectangular region from −2000 to 2000 m along the x-axis and −2000 to 2000 m along the y-axis, while the second is that the AOA sensors are deployed at the circumference by equiangular separations with a radius of 2000 m centered at the origin. All sensors in the above two regular configurations are with the same heights of m, and the standard deviations of and are all set to be . The region of the evaluation of GDOP for targets is the same as that of Example 2.
The contours of GDOP and CEP for the two regular configurations are depicted in Figures 5 and 6, and Figures 7 and 8, respectively. With the comparison of Figures 5 and 7, it is observed that the rectangular configuration of sensors in Figure 5 is comparable with or even better than the circular configuration in Figure 7, since it is clearly shown that in Figure 9, the region with the same level of GDOP in Figure 5 is generally larger than the one in Figure 7 when the values of GDOP contour levels are greater than 3 m. Indeed, the two proposed regular configurations of AOA sensors are all better than the one with random deployment of AOA sensors of Example 2. Moreover, in 2D AOA target localization, sensors deployed around the target by equiangular separations with identical observation ranges and noise variances are an optimal sensor–target geometry.45 However, noting that the contours of GDOP in Figure 7, the center (origin) of the AOA sensors with equiangular separations is not the point with the smallest GDOP value for 3D case.
The contours of GDOP for rectangular configuration of Example 3.
The contours of CEP for rectangular configuration of Example 3.
The contours of GDOP for circular configuration of Example 3.
The contours of CEP for circular configuration of Example 3.
The contours of GDOP for rectangular and circular configurations of Example 3.
In practice, it is usually expected that the sensors are deployed with a good sensor–target geometry. Some performance measures concerning the accuracy of target localization including the determinant of the FIM and its inverse of the CRLB are adopted and optimized directly or indirectly to realize optimal sensor–target geometries. Based on different performance measures and methodologies, the optimal sensor configurations for 2D and/or 3D target localization using AOA and/or range-only sensors are, respectively, achieved by Xu and Doğançay33 and Zhao et al.46 These approaches can be extensively used to realize some optimal sensor–target geometries for single static target in 2D and/or 3D . For multiple targets localization, especially for the situation that multiple AOA passive sensors are required to be pre-deployed at a specific region where the targets may unexpectedly penetrate into such defense space, the aforementioned methods on the optimal sensor placement might not be competent for such case. As shown in Figures 5 and 7, the proposed analytical formula of GDOP in equation (56) can be used in advance to assess the sensor–target geometry for the surveillant region, then the results can be further used to determine preferred sensor–target geometries. For the results of Figures 5 and 7, one would prefer the rectangular configuration of Figure 5, where any target within the rectangular region from −2000 to 2000 m along the x-axis and −2000 to 2000 m along the y-axis, the values of GDOP are all less than 3 m. Indeed, the proposed analytical formula of GDOP can be used as a general objective function to be minimized for the optimal deployment of AOA sensors in 3D target localization.
Conclusion
In this article, we proposed a more general analytical formula of GDOP for 3D target localization using AOA sensors. Unlike the existing works in the literature, for the derivation of GDOP, the observation noise variances of AOA sensors are assumed to strictly satisfy a continued equality constraint, or the observation ranges and noise variances are assumed to be identical. In our method, no restrictive assumptions are made on the number of sensors, the observation ranges, and noise variances. The analytical formula of GDOP is obtained by using the Cauchy–Binet formula on the derived FIM. Moreover, a necessary and sufficient condition of the invertibility of the FIM is given, which can be used to judge the existence of GDOP. A concise procedure of evaluating the GDOP is also proposed, and then some examples are used to demonstrate the effectiveness of the presented approach.
As pointed out by Schmitt and Fichter,40 under the frame of spherical coordinates, the use of elevation and azimuth angles inevitably introduces singularities in 3D AOA target localization when . It is worthwhile to develop some new descriptions of the observation model of 3D AOA target localization for avoiding the aforementioned singularities. A unit vector observation model adopted in Zhao et al.46 may be suitable to overcome the problem of singularities. In future work, we will try to develop some new observation models including the unit vector model and attitude quaternion model for 3D AOA target localization. Then we will use these new observation models to investigate the performance measure as well as the optimal deployment for 3D AOA target localization.
Footnotes
Handling Editor: Paolo Barsocchi
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
ORCID iD
Jianfeng Lu
References
1.
YounisMAkkayaK. Strategies and techniques for node placement in wireless sensor networks: a survey. Ad Hoc Netw2008; 6: 621–655.
Hofmann-WellenhofBLichteneggerHWasleE. GNSS–global navigation satellite systems: GPS, GLONASS, Galileo, and more. New York: Springer Science+Business Media, 2007.
4.
PotortiFCrivelloABarsocchiP, et al. Evaluation of indoor localisation systems: comments on the ISO/IEC 18305 standard. In: Proceedings of the 2018 9th international conference on indoor positioning and indoor navigation (IPIN), Nantes, 24–27 September 2018, pp.1–7. New York: IEEE.
5.
FurfariFCrivelloABarsocchiP, et al. What is next for indoor localisation? Taxonomy, protocols, and patterns for advanced location based services. In: Proceedings of the 2019 international conference on indoor positioning and indoor navigation (IPIN), Pisa, 30 September–3 October 2019, pp.1–8. New York: IEEE.
6.
TorrieriDJ. Statistical theory of passive location systems. IEEE Trans Aerosp Electron Syst1984; 20: 183–198.
7.
Van TreesHBellKLTianZ. Detection, estimation, and modulation theory, part I: detection, estimation, and filtering theory. 2nd ed.New York: John Wiley & Sons, 2013.
8.
BrownGCMcClellanJHHolderE. Performance bound analysis of a hybrid array. IEEE Trans Signal Process1996; 44: 74–82.
9.
Bar-ShalomYLiXRKirubarajanT. Estimation with applications to tracking and navigation: theory, algorithms and software. New York: John Wiley & Sons, 2004.
LvXLiuKHuP. Geometry influence on GDOP in TOA and AOA positioning systems. In: Proceedings of the 2010 second international conference on networks security, wireless communications and trusted computing (NSWCTC), Wuhan, China, 24–25 April 2010, vol. 2, pp.58–61. New York: IEEE.
12.
ZhongYWuXYHuangSC. Geometric dilution of precision for bearing-only passive location in three-dimensional space. Electron Lett2015; 51: 518–519.
13.
MengWXieLXiaoW. Communication aware optimal sensor motion coordination for source localization. IEEE Trans Instrum Meas2016; 65: 2505–2514.
14.
MartínezSBulloF. Optimal sensor placement and motion coordination for target tracking. Automatica2006; 42: 661–668.
15.
LinCLinZZhengR, et al. Distributed source localization of multi-agent systems with bearing angle measurements. IEEE Trans Autom Control2016; 61: 1105–1110.
ShimJNParkHChaeCB, et al. Cramer-Rao lower bound on AoA estimation using an RF lens-embedded antenna array. IEEE Anten Wirel Propag Lett2018; 17: 2359–2363.
18.
KimYHKimDGHanJW, et al. Analysis of sensor-emitter geometry for emitter localisation using TDOA and FDOA measurements. IET Radar Sonar Nav2016; 11: 341–349.
19.
LeeHB. A novel procedure for assessing the accuracy of hyperbolic multilateration systems. IEEE Trans Aerosp Electron Syst1975; 11: 2–15.
YangCBlaschEKadarI. Geometric factors in target positioning and tracking. In: Proceedings of the 2009 12th international conference on information fusion, Seattle, WA, 6–9 July 2009, pp.85–92. New York: IEEE.
23.
SharpIYuKGuoYJ. GDOP analysis for positioning system design. IEEE Trans Veh Technol2009; 58: 3371–3382.
24.
LiXZhouYLiangG, et al. Analytical solutions for passive source positioning and geometric dilution of precision. In: Proceedings of the 2015 IEEE international conference on information and automation, Lijiang, China, 8–10 August 2015, pp.2450–2453. New York: IEEE
25.
DoongSH. A closed-form formula for GPS GDOP computation. GPS Solut2009; 13: 183–190.
26.
YuK. 3-D localization error analysis in wireless networks. IEEE Trans Wirel Commun2007; 6: 3473–3481.
27.
YounJJoJKimDK. Study on Cramer-Rao lower bound of angle-of-arrival position estimation for cooperative vehicle-to-vehicle (V2V) communication. In: Proceedings of the 2018 9th international conference on information and communication technology convergence (ICTC), Jeju, South Korea, 17–19 October 2018, pp.1514–1517. New York: IEEE.
28.
DempsterA. Dilution of precision in angle-of-arrival positioning systems. Electron Lett2006; 42: 291–292.
29.
LiYYQiGQShengAD. Performance metric on the best achievable accuracy for hybrid TOA/AOA target localization. IEEE Commun Lett2018; 22: 1474–1477.
30.
NorooziASebtMA. Algebraic solution for three-dimensional TDOA/AOA localisation in multiple-input–multiple-output passive radar. IET Radar Sonar Nav2018; 12: 21–29.
31.
KazemiSARAmiriRBehniaF. Efficient convex solution for 3-D localization in MIMO radars using delay and angle measurements. IEEE Commun Lett2019; 23: 2219–2223.
32.
LiWWangLXiaoM, et al. Closed form solution for 3D localization based on joint RSS and AOA measurements for mobile communications. IEEE Access2020; 8: 12632–12643.
33.
XuSDoğançayK. Optimal sensor placement for 3D angle-of-arrival target localization. IEEE Trans Aerosp Electron Syst2017; 53: 1196–1211.
34.
RuiLHoK. Elliptic localization: performance study and optimum receiver placement. IEEE Trans Signal Process2014; 62: 4673–4688.
35.
Moreno-SalinasDPascoalAArandaJ. Sensor networks for optimal target localization with bearings-only measurements in constrained three-dimensional scenarios. Sensors2013; 13: 10386–10417.
36.
PayneAN. Observability conditions for angles-only tracking. In: Proceedings of the 1988 22nd Asilomar conference on signals, systems & computers, Pacific Grove, CA, 31 October–2 November 1988, pp.451–457. York, PA: Maple Press.
37.
FerdowsiM. Observability conditions for target states with bearing-only measurements in three-dimensional case. In: Proceedings of the 2006 IEEE international conference on control applications, Munich, 4–6 October 2006, pp.1444–1449. New York: IEEE.
38.
WoffindenDCGellerDK. Observability criteria for angles-only navigation. IEEE Trans Aerosp Electron Syst2009; 45: 1194–1208.
39.
SeoMGTahkMJ. Observability analysis and enhancement of radome aberration estimation with line-of-sight angle-only measurement. IEEE Trans Aerosp Electron Syst2015; 51: 3321–3331.
40.
SchmittLFichterW. Continuous singularity free approach to the three-dimensional bearings-only tracking problem. J Guid Control Dynam2016; 39: 2673–2682.
41.
PolyaninADManzhirovAV. Handbook of mathematics for engineers and scientists. Boca Raton, FL: CRC Press, 2006.
42.
ShaoHJZhangXPWangZ. Efficient closed-form algorithms for AOA based self-localization of sensor nodes using auxiliary variables. IEEE Trans Signal Process2014; 62: 2580–2594.
43.
ShafarevichIRRemizovAO. Linear algebra and geometry. New York: Springer Science+Business Media, 2012.
44.
Van DiggelenF. GNSS accuracy: lies, damn lies, and statistics. GPS World2007; 18: 26–32.
45.
DoğançayKHmamH. Optimal angular sensor separation for AOA localization. Signal Process2008; 88: 1248–1260.
46.
ZhaoSChenBMLeeTH. Optimal sensor placement for target localisation and tracking in 2D and 3D. Int J Control2013; 86: 1687–1704.