
Abstract
Node localization is one of the key technologies in the wireless sensor network research field, which is crucial to the high-accuracy localization of mobile nodes, but the positioning error of traditional algorithms such as received signal strength indicator and angle of arrival is more than 4 m, which has almost no practical value. For example, the localization accuracy of the localization algorithm based on received signal strength indicator will be reduced sharply when affected by signal reflection, multipath propagation, and other interference factors. To solve the problem, a three-dimensional localization algorithm of mobile nodes was proposed in this article based on received signal strength indicator–angle of arrival and least-squares support-vector regression, which fused the ranging information of received signal strength indicator algorithm and the angle of arrival algorithm and optimized the estimated distance of unknown nodes. Next, the mobile node model and least-squares support-vector regression modeling mechanism were built according to the hop count of the shortest distance between nodes. Finally, the unknown mobile nodes were localized based on least-squares support-vector regression modeling. The experimental results showed that compared with the localization algorithms without optimized ranging information or least-squares support-vector regression modeling, the algorithm proposed in this study exhibited significantly improved stability, a reduced mean localization error by more than 50%, and increased localization accuracy.
Keywords
Introduction
Moving target localization is one of the hotspots in the wireless sensor network (WSN) research field, which has been widely applied in urban management, environmental monitoring, emergency rescue and disaster relief, military affairs and national defense, and other fields. 1 WSN node localization aims to acquire the target location information mainly by information perception, interaction, and processing between nodes, which can be divided into two types according to different modes of localization, namely, ranging-based algorithms 2 and non-ranging-based algorithms. 3 The ranging-based localization algorithms 4 are often selected in practical application since their accuracy is higher than that of the non-ranging-based localization algorithms. The traditional ranging-based localization algorithms mainly consist of the time of arrival (TOA) measurement, 5 time difference of arrival (TDOA) measurement, 6 received signal strength indicator (RSSI) measurement, 7 and angle of arrival (AOA) measurement. 8 However, the traditional ranging-based localization algorithms are vulnerable to the influences of environmental noise, multipath reflection, and other uncertainties, which can reduce the ranging accuracy, thus affecting the target localization accuracy. 9 As a result, how to improve the traditional ranging algorithm to increase the ranging accuracy is a key problem to be addressed in practical application.
To effectively improve the localization accuracy of ranging-based algorithms, many researchers in related fields have studied the fusion of ranging-based localization algorithms. For example, C Wang and R Yao 10 proposed a localization algorithm fusing AOA and RSSI of directional antennas to solve the low localization accuracy of multi-base stations. An unbalanced fusion of the two measurements, known as 1AOA/nRSSI, was proposed by AT Le et al. 11 to simplify the WSN. Besides, J Wang 12 completed the fusion localization by combining the Kalman filter with the AOA of direct path and RSSI information. The fusion of differential received signal strength indicator (DRSSI) and AOA for recursive localization of a radio frequency (RF) source with unknown transmitted power in none-line-of-sight (NLOS) condition was proposed by Dehghan et al. 13 Although the fusion ranging algorithm can effectively improve the ranging-based localization accuracy, it fails to solve the problems of low anti-noise capability and poor stability during localization.
Consequently, based on the ranging algorithm, different models can be used to localize the targets, such as the circumference-based localization model, hyperbolic localization model, and least-squares support-vector regression (LSSVR). 14 Among them, LSSVR can convert the complicated convex quadratic programming problem into a problem of solving linear equations, which greatly shortens the calculation process, improves the calculation efficiency, and possesses good anti-noise capability. 15 Therefore, the localization accuracy and anti-noise capability of the system can be improved effectively by introducing LSSVR into WSN node localization, and the fusion of LSSVR with WSN localization has been researched by researchers in related fields. For example, Y Zhong et al. 16 put forward the LSSVR localization algorithm based on Gaussian filter RSSI to solve the large errors of RSSI ranging-based localization. M Xia et al. 17 analyzed the ranging principles and factors affecting localization error and proposed the LSSVR location algorithm based on Gaussian filter RSSI.
Z Wang and X Zheng 18 proposed an LSSVR localization algorithm for multi-hop WSNs. Moreover, a modern and high-efficiency algorithm based on a new optimization technique for localization processes in an outdoor environment was presented by Gumaida and Luo 19 in the literature. Despite the wide application of LSSVR in node localization, it mainly supplements or improves a certain method, and there are a few studies on the improvement of RSSI ranging accuracy, rapid LSSVR modeling, and dynamic node prediction. Hence, the advantages of applying the improved ranging-based localization algorithm and the LSSVR to node localization were fully studied in this article. The main contributions of this study are shown as follows:
First, the final localization can be realized by fusing multiple methods, so as to improve the localization accuracy of the ranging algorithm. In view of the disadvantages of the traditional RSSI ranging algorithm in practical application, a localization algorithm based on RSSI-AOA was proposed in this study by fusing the ranging information of the RSSI and AOA algorithms, which improved the large ranging error of the RSSI algorithm due to external interference.
Second, the motion model of mobile nodes was built in this study using the hop count of the shortest distance between the anchor node and the unknown node. In addition, based on the mapping relationship between the original space and changing space of LSSVR, as well as the modeling principle of mobile nodes, the LSSVR mobile node modeling mechanism was established, so as to improve the anti-noise performance and generalization capability of the algorithm. Furthermore, the nodes involved in LSSVR modeling and responsible for data measurement were set as the modeling nodes.
Finally, in this article, LSSVR was used to train the sample set in order to give full play to its high calculation efficiency and good anti-noise performance. In addition to the fusion of the ranging information of RSSI and AOA, the LSSVR mobile node modeling mechanism was employed to predict and estimate the coordinates of the unknown mobile nodes, thereby improving the localization accuracy of unknown nodes, which was verified by means of simulation experiments.
This article was developed as follows. The fusion ranging algorithm based on RSSI and AOA was introduced in section “Fusion ranging algorithm based on RSSI and AOA.” The modeling and localization algorithm of mobile nodes based on LSSVR were discussed in section “Fusion ranging algorithm based on RSSI and AOA.” The simulation experiments were introduced and the results were analyzed in section “Simulation experiments and result analysis.” The conclusion and future prospects were described in section “Conclusion.”
Fusion ranging algorithm based on RSSI and AOA
RSSI ranging algorithm
The distance between the transmitter and the receiver is calculated by the RSSI ranging algorithm by virtue of the signal strength, transmission energy, and path loss during communication. When the power of transmit signals at the transmitting end is known, the distance between the transmitting end and the receiving end can be estimated by calculating the path loss via the power of signals received at the anchor nodes, and then the locations of unknown nodes can be estimated. 20 According to the definition of RSSI, P could be determined by RSSI through the received signal strength, which is shown in formula (1) after simplification

The RSSI ranging model could be obtained by substituting formula (1) into the logarithmic distance loss model, as shown in formula (2)

wherein, RSSI(d) indicates the RSSI value received by the receiving node when the transmitting distance is d (unit: dBm). RSSI(d0) means the power reference value of signals received by the receiving nodes when the transmitting distance is d0.
Since the RSSI ranging accuracy may be reduced by the inherent characteristics of nodes and such uncertainties as the air humidity, atmospheric pressure, and temperature in outdoor environments, the fusion of the RSSI algorithm was fused with other ranging algorithms in this study, so as to improve the ranging accuracy of the algorithm.
AOA ranging algorithm
In the AOA ranging algorithm, the ranging must be performed by the ultrasonic sensor or array antenna mounted on the nodes. The obtained angle relationship between the anchor node and the unknown node is subjected to geometric calculation, and then the location of the unknown node can be estimated. 21 The ranging principle of the AOA algorithm is shown in Figure 1.
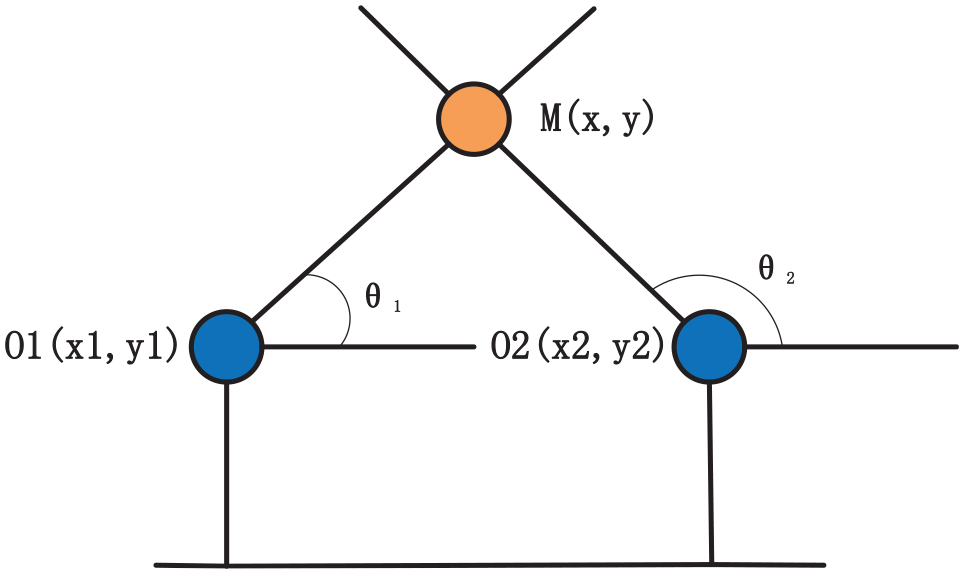
The ranging principle of the AOA algorithm.
In Figure 1, the location coordinates of the fixed nodes O1 and O2 are

The location coordinate of the unknown node M can be obtained by solving formula (3) simultaneously (formula (4))

In the AOA ranging algorithm, only the angles of incidence from two or more unknown nodes to the fixed node are required to complete the localization of the unknown nodes, so the hardware cost needed for this algorithm in ranging process is relatively low. Nevertheless, the localization accuracy of the AOA algorithm decreases with the increase in the distance between the base station and the terminal, and the localization accuracy is low when it is not improved, so this algorithm is generally not used alone.
RSSI-AOA ranging algorithm
In actual localization process, signal reflection, multipath propagation, and other factors can increase the error of RSSI ranging, but the introduction of angle information (AOA) is capable of reducing the influence of these factors on RSSI ranging. Accordingly, the ranging algorithm fusing RSSI and AOA can improve the localization accuracy of unknown nodes prominently, which is of certain study significance.
The localization principle based on the ranging algorithm is shown in Figure 2, where one unknown target node

The localization principle based on the ranging algorithm: (a) RSSI ranging, (b) AOA ranging, and (c) RSSI-AOA fusion ranging.
First, the RSSI model was replaced with the logarithmic distance path loss model in the path loss model (formula (5))

wherein,
Therefore,

wherein, L0 indicates the path loss when the reference distance between nodes is d0. β refers to the path loss coefficient, and
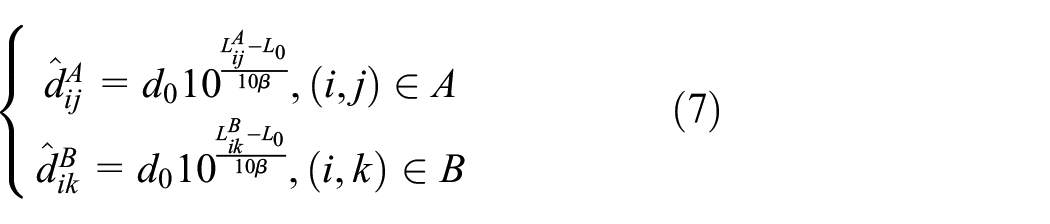
The maximum likelihood estimate of distance between every two nodes can be obtained from the RSSI model, as shown in formula (7)
In addition, receiving antennas should be placed in the anchor nodes to obtain the azimuth angle and elevation angle measured by AOA (Figure 3).
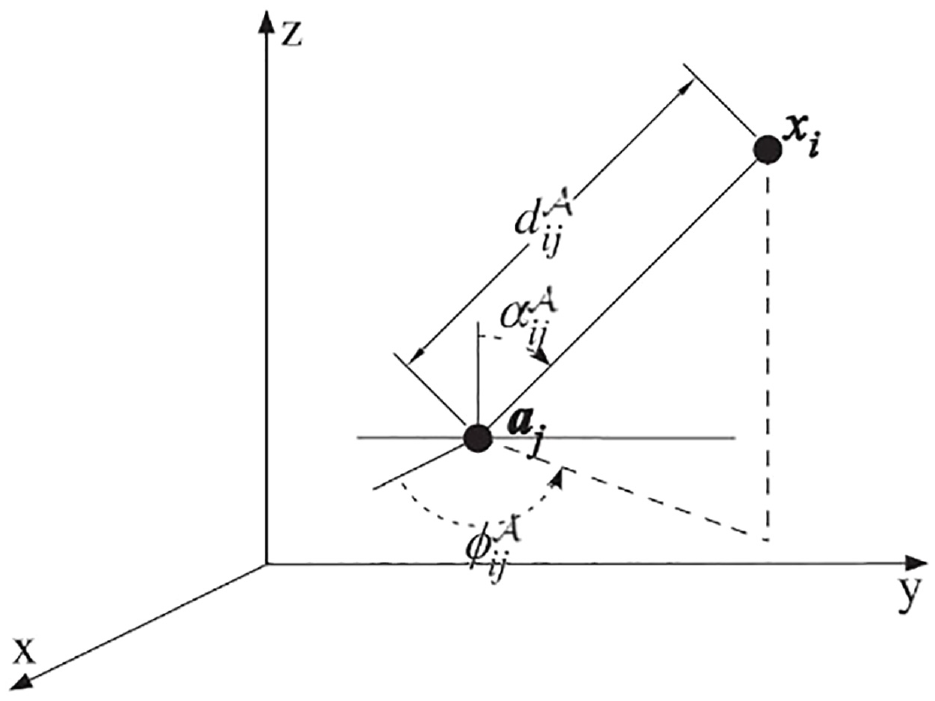
The azimuth angle and elevation angle measured by AOA.
According to the geometrical relationship in Figure 3, the relationship shown in formula (8) could be obtained by measuring and modeling the angle information

wherein,
With a given observation vector

where

Formula (9) is a function of the PDF (Probability Density Function) model, and formula (9) can be used to deduce the relationship shown in formula (10)


The maximum likelihood estimate method was finally adopted. The distance information of multiple neighbor nodes can be used to minimize the difference between the measured distance and the estimated distance in node localization. 22 In the RSSI-AOA ranging algorithm, the maximum likelihood estimate method could be used to calculate the coordinates of target nodes, as shown in formula (11)

Modeling and localization algorithm of mobile nodes based on LSSVR
Localization of mobile nodes based on LSSVR
Modeling of mobile nodes
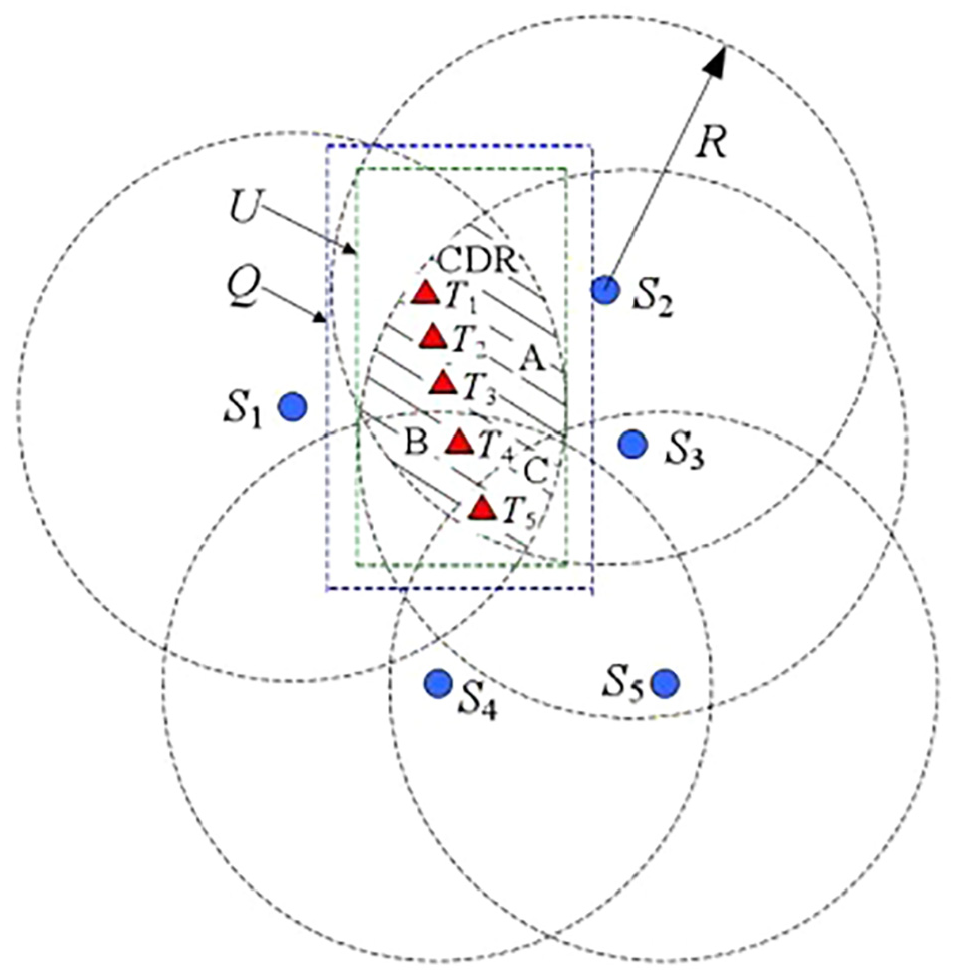
In this study, the selected mobile node model was static for anchor nodes and mobile for unknown nodes. During node modeling, the mapping relation among the unknown mobile nodes in the three-dimensional (3D) space is shown in Figure 4. In the input space

The mapping relation among the unknown mobile nodes in the three-dimensional (3D) space.
It was assumed that M sensor nodes

Assuming that the coordinate of the unknown node i is

LSSVR modeling principle
LSSVR, based on the statistical learning theory, transforms the training samples in low-dimensional spaces into feature vectors in high-dimensional spaces, then constructs a segmentation hyperplane in high-dimensional spaces, and finally fits the samples with the least square error.
23
The principle of the LSSVR learning machine is shown in Figure 5. In Figure 5,

The principle of the LSSVR learning machine.
It was assumed that M sensor nodes
With the training sample set assumed as

wherein,
Since the solution of the optimal problems shown in formula (14) was complicated, the Lagrange multiplier method was applied to simplify the solution steps greatly. The optimal problems were transformed into dual problems by introducing the non-negative coefficient

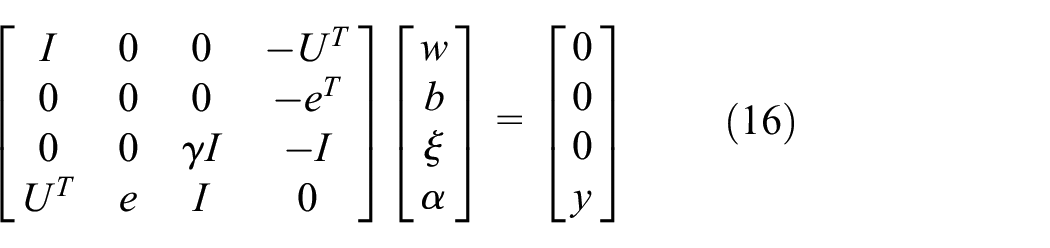
wherein,
Then, formula (16) was optimized, the kernel function

wherein,
Another form of decision function representing the LSSVR segmentation hyperplane was obtained by solving the unknown parameters

The input vector
Localization of mobile nodes based on LSSVR
Assuming that there were nodes
Localization principle of mobile nodes based on LSSVR.
At the time of

The location of the target nodes could be calculated by inputting
After the introduction of LSSVR, the problem of complex convex quadratic programming is transformed into the problem of solving linear equations, which greatly reduces the calculation amount of the algorithm and improves the calculation efficiency.
3D localization algorithm of mobile nodes based on RSSI-AOA and LSSVR
The 3D localization algorithm of mobile nodes based on RSSI-AOA and LSSVR proposed in this study was carried out as per the following steps:
Step 1: M sensor nodes
Step 2: the information was propagated among the neighbor nodes, so each node could obtain the hop count of the shortest distance of each anchor node. Then, at an interval of
Step 3: when the rendezvous node received the data from each anchor node, the RSSI-AOA localization algorithm was used to calculate the results

Step 4: LSSVR was used to train the sample set mentioned above, and the optimal problems shown in formula (21) were solved in combination with the radial basis function

wherein,
Step 5: the parameters obtained from Step 4 were substituted into the radial basis function, as shown in formula (22)
Step 6: the kernel function parameters and regularization parameter obtained from Step 5 were used to obtain the Lagrange multiplier, thus simplifying the problem, as shown in formula (23)

Step 7: the decision function was obtained. The localization model finally obtained is shown in formula (24)

And


The flow chart of RSSI-AOA-LSSVR algorithm.
Simulation experiments and result analysis
To evaluate the superiority and effectiveness of the algorithm proposed in this study, simulation experiments were carried out in Matrix Laboratory (MATLAB)-R2017b for verification. Assuming that the target mobile nodes moved at a constant speed in the
The setting of experiment parameters.


The moving track of the unknown nodes in the 3D space.
Influence of anchor node density on localization error
The anchor node density is one of the important indexes of WSN localization, which is inversely proportional to the mean localization error and directly proportional to the hardware cost and system power consumption. As a result, it is of great importance to select the appropriate anchor node density for the control over the localization accuracy and hardware cost in practical application. The influence of the anchor node density on the mean localization error of the system is shown in Figure 9. It was revealed that the localization error of the AOA-LSSVR algorithm was large and the most unstable, with a fluctuation range of 0.5–4 m. The localization errors of the remaining five algorithms were relatively small and stable, and the RSSI-AOA-LSSVR localization algorithm had the smallest mean localization error, with a fluctuation range of 0.24–0.38 m, indicating that the algorithm proposed in this article can ensure high localization accuracy in the case of small anchor node density. In practical application, the anchor node density can be adjusted to reduce the hardware cost and power consumption of the system.

The influence of the anchor node density on the mean localization error.
Influence of connectivity on localization error
In WSN localization, the connectivity of anchor nodes had a direct influence on the mean localization error of the system, which is generally inversely proportional to the localization error of the system. In MATLAB simulation experiments, the density of anchor nodes was first set as 20%, and the variation range of the wireless range was 25–60 m. According to the simulation results of the connectivity and localization error (Figure 10), the AOA-LSSVR localization algorithm presented the largest variation and localization error (error range = 0.47–4.65 m). The mean localization errors of the remaining five algorithms were small when the wireless range of the anchor nodes was small, and the variation of the curve decreased gradually with the gradual increase in the wireless range. Among the algorithms, the curve of the RSSI-AOA-LSSVR localization algorithm was the flattest, indicating that this algorithm is basically not influenced by the connectivity. Moreover, its mean localization error was kept at about 0.17 m, which was reduced by 50%–96%, showing high localization accuracy and strong stability.

The simulation results of the connectivity and localization error.
Influence of mobility of unknown nodes on localization error
The mobility of unknown nodes is an uncontrollable factor during actual localization, which has a certain influence on the localization accuracy. The simulation results of the mobility and mean localization error of unknown nodes are shown in Figure 11. It was manifested that the localization error of each algorithm increased as the moving speed of unknown nodes was increased. The localization error ranges of the AOA localization algorithm, RSSI localization algorithm, and RSSI-AOA localization algorithm were 3.6–7.4 m, 4.8–5.5 m, and 1.8–2.54 m, respectively, and all the three algorithms presented large error and curve fluctuations. The remaining three localization algorithms showed very stable error curves and relatively small mean localization errors. Specifically, the localization errors of both AOA-LSSVR and RSSI-AOA-LSSVR localization algorithms were within 0.7 m, while the mean localization error of the RSSI-AOA-LSSVR algorithm was maintained at the lowest level, with the mean localization accuracy of about 0.4 m, showing good overall performance.

The simulation results of the mobility and mean localization error of unknown nodes.
Mean localization errors of mobile nodes
Figure 12 illustrates the comparison of the mean localization errors among the six algorithms for the localization of the unknown nodes. The AOA-LSSVR, AOA, and RSSI localization algorithms showed great curve fluctuation ranges and localization errors, while the RSSI-AOA, RSSI-LSSVR, and RSSI-AOA-LSSVR localization algorithms exhibited small curve fluctuation ranges and localization errors on the whole. At the same time, the RSSI-AOA-LSSVR localization algorithm had the smallest localization error, which was above 50% smaller than that of the remaining five algorithms, and it had the smallest curve fluctuation range as well, presenting better stability and higher localization accuracy.
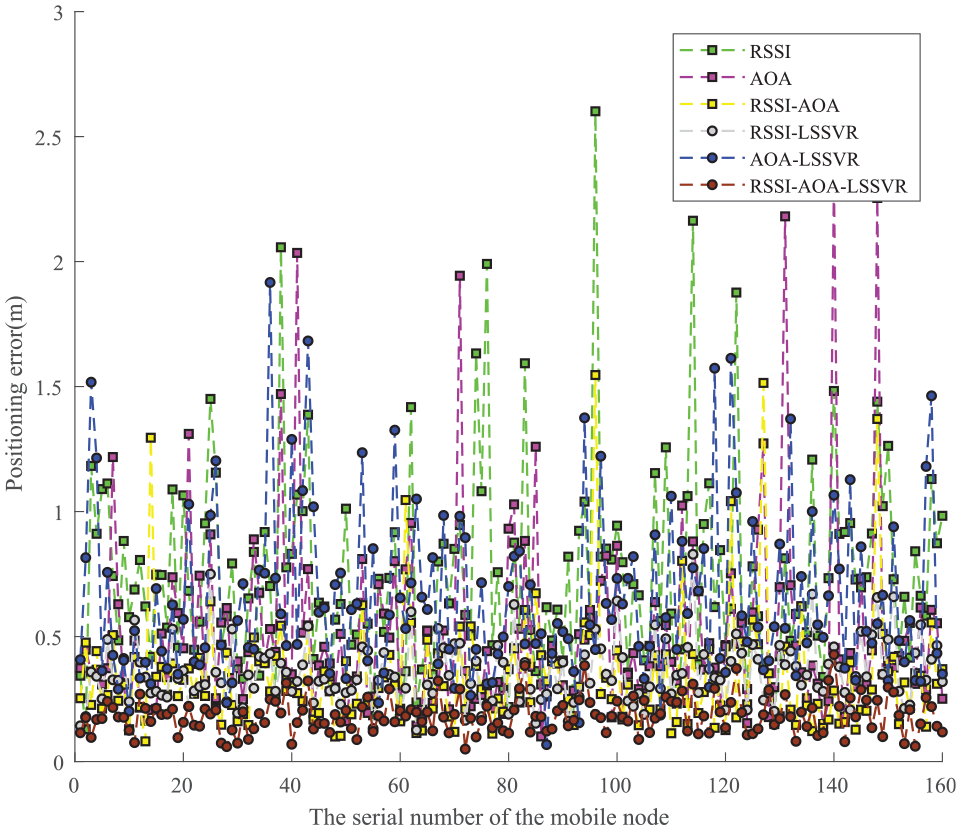
The mean localization errors for the localization of the unknown nodes.
Conclusion
In this study, a 3D localization algorithm of mobile nodes based on RSSI-AOA and LSSVR was proposed to cope with the low localization accuracy and poor anti-interference capability of the RSSI localization algorithm in WSN during the localization of mobile nodes, which not only optimized the parameters of LSSVR but also studied the ranging and LSSVR modeling. To reduce the ranging error, the ranging information of the RSSI and AOA algorithms was fused. Moreover, the LSSVR modeling mechanism was established based on the hop count of the shortest distance between nodes, and it was used to predict the locations of the target nodes, so as to improve the anti-noise capability and stability of the system. The following conclusions can be drawn according to the theoretical study and simulation experiments in this article:
In this study, the ranging information of the RSSI and AOA algorithms was fused to localize the targets, and the results showed that compared with the RSSI or AOA ranging-based localization algorithm alone, the RSSI-AOA localization algorithm displayed an obviously smaller localization error but still poor stability. Consequently, the LSSVR modeling algorithm was added for predicted localization according to the mapping relationship between the anchor nodes and the unknown nodes. The results of the MATLAB simulation experiments revealed that the localization error fluctuation range of the RSSI-AOA-LSSVR localization algorithm was 0.24–0.38 m under the influence of the anchor node density, showing the best and relatively stable performance on the whole. The localization error curve was the flattest when affected by the connectivity of the anchor nodes, with a mean localization error of 0.17 m, which was reduced by 50%–96% compared with other localization algorithms. In general, the RSSI-AOA-LSSVR localization algorithm had higher localization accuracy, better anti-interference capability, and higher stability.
Although the effectiveness of the 3D localization algorithm of mobile nodes based on RSSI-AOA and LSSVR proposed in this study was verified by theoretical analysis and simulation experiments, the localization in this study only targeted at the unknown nodes moving at a constant speed, while the unknown nodes in actual localization are often moving at variable and irregular speed. As a result, how to realize high-accuracy 3D localization of unknown nodes moving irregularly at non-uniform speed is the main content of future study.
Footnotes
Handling Editor: Lyudmila Mihaylova
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (no. 61741303), the Key Laboratory of Spatial Information and Geomatics (Guilin University of Technology) (no. 19-185-10-08), and the Scientific Research Basic Ability Improvement Project of Young and Middle-aged Teachers in Colleges and Universities in Guangxi (no. 2021KY0260.
Data availability
Data sharing is not applicable to this article as no data sets were generated or analyzed during this study.