
Abstract
As theoretical proof has shown that a hexagonal topology can obtain maximal coverage with a fixed number of sensor nodes, node deployment for mobile sensor networks has the objective of forming a hexagonal network topology while consuming minimum energy. Using virtual-force algorithms to move initially randomly distributed nodes into a target topology is one of the widely studied methods for achieving this goal. In this work, a novel virtual-force algorithm based on physical laws in a dusty plasma system (i.e. VFA-DP) was applied within a mobile sensor network deployment scenario. The VFA-DP force has a central attracting force which can provide a screening effect via exponential decay. Here, to evaluate how perfect the final grids become from virtual-force algorithms, we introduce a performance metric based on the pair correlation function in a crystalline structure. Via simulation studies, we determined that the topology resulting from the VFA-DP is much closer to a hexagon. The analysis also indicated that the VFA-DP converges faster than another virtual-force algorithm based on the Lennard-Jones potential (VFA-LJ), resulting in lower communication-related energy costs in real deployment scenarios. The method developed in this article is derived from studies of crystalline structure from condensed matter physics and shows clear evidence of when the regular lattice is ready. It will provide some guidance for engineering by aiding deployment in complex geometric areas or those recovering from disaster.
Introduction
Mobile sensor networks (MSNs), owing to advanced capabilities in sensing and commutation, have enabled novel applications1,2 such as disaster management, factory automation, environment monitoring, and offshore exploration. For applications which require a massive number of sensor nodes, mobile sensors deployment methods should meet the performance requirements imposed by diverse applications 3 and provide maximal coverage. 4 Another requirement is that during the deployment process, the entry cost should be at a minimum. Energy cost can be divided into two categories, one for communication and the other for node movement. The static approach, deploying sensor nodes to a pre-determined destination, 5 lacks adaptivity to the environment and disaster recovery. Thus, people prefer to use self-organized relocation schemes 6 to guide sensor nodes, autonomously forming optimal coverage topology.
Recently, some properties of a physical system composed of a small number of particles have been reported.7,8 Via simulations, some experience or guidance for different virtual force methods, as well as different physical parameters within the same form of force regarding engineering, can be achieved. In this theory, when kinetic energy is dissipated, the system approaches a structure that has minimal potential energy, oscillates around the equilibrium point and falls into the potential well. The above idea is one type of naive method employed for understanding the phase transform process in particle systems. If the system has only one potential energy global minimum point, the system will then evolve into the structure associated with this potential energy minimum. However, there are some local minimum points for particular systems. For example, the lowest energy arrangement for an infinite number of atoms described by the Lennard-Jones potential is hexagonal close-packing. However, under pressure, the lowest energy structure switches between cubic and hexagonal close packing. 9 Based on the Lennard-Jones potential (i.e. VFA-LJ), such has been observed within existing virtual force methods for MSN deployment. In particular, in Garetto et al., 10 the network topology converged to a hexagonal structure. However, how physical parameters impact the final grids is also not clear although physicists have observed that. In general, pressure from the environment can accelerate crystal formation and improve the quantity of the grids. As a result, here, comparing the grid quantity and the convergence speed required for obtaining a perfect hexagon from different virtual force methods is the main focus of the simulation studies in our work.
Hexagonal topology provides maximum coverage with a minimum number of sensor nodes.11–13 As such, existing virtual-force algorithms10,14–17 have sought to push sensor nodes to formulate hexagonal deployment. Zou and Chakrabarty’s 16 publication is the first widely cited work for introducing virtual force algorithms into the MSN. Garetto et al.’s 10 work was the first to achieve hexagonal deployment for a relatively large number nodes, and also contained practical engineering discussions for a real MSN work. However, no systematic review of these form solutions has provided a fundamental understanding of the principles behind the method, and most of these ad hoc approaches have resulted in imperfect structures. Here, we provide a virtual-force algorithm for coverage-optimal node deployment in MSNs via the two-dimensional (2D) Yukawa crystal and propose some of the necessary components required for the model to make the sensors converge to a hexagonal structure.
In addition, previously investigated virtual force methods have all been based on a fully ad hoc approach where nodes generally have both a repulsive and an attractive force to one another.10,16 The method we propose here 18 has a central attracting force that acts like a pressure within normal physical systems. This pressure force helps the convergence speed and the grid quantity. Furthermore, we use a pair correlation function, which has been used to evaluate particle systems in statistical mechanics, 19 to evaluate the final grid quantity. It can also be used to effectively describe the convergence process of the whole network. Our hope is that this work can provide some guidance for engineering by aiding deployment in complex geometric areas or those recovering from disaster.
This article is organized as follows. In section “Sensor network model,” we present a network model for an MSN and formulate the coverage-optimal node deployment problem. In section “Virtual-force algorithms for node deployment,” a fundamental analysis of existing virtual-force algorithms is presented. In section “Virtual-force algorithm based on Yukawa potential,” we propose a novel virtual-force algorithm based on physical laws within a 2D dusty plasma system, as well as a novel performance metric based on the pair correlation function for the same physical system. In section “Simulation results,” we compare the proposed algorithm with existing virtual-force algorithms for two aspects, including the following: (1) the similarity between the resulting deployment topology and a perfect hexagon, and (2) the convergence rate toward a stable hexagonal structure. Section “Conclusion and future work” consists of concluding remarks.
Sensor network model
For the study, we assumed that all sensor nodes had identical capabilities in sensing, communication, computation, and mobility. The coverage field consists of a 2D plane, and sensors can move freely within the plane. Each sensor node has a sensing radius of

Both the sensing and communication ranges were assumed to be a disk, with radii of
Mathematically, the problem of covering a square with a minimum number of disks has been intensely investigated. Placing disks on the vertices of a triangular lattice (or, equivalently, at the center of regular hexagons) is known to be optimal in terms of the number of disks needed to achieve a full coverage plane. This asymptotic optimality was initially demonstrated rigorously in the Kershner 11 and was recently rediscovered in the Zhang and Hou. 20
For MSNs, a similar problem has also been addressed in Pompili et al.
2
and Bai et al.
4
Specifically, if
With an optimal deployment topology (i.e. hexagons), the minimum number of sensor nodes required to fully cover a target square area can be derived as follows

where
In Figure 2, we plot the minimum number of sensor nodes required to cover a square region as a function of the sensing radius. The optimum number of sensor nodes decreases quadratically as the sensing radius increases.

The minimum number of sensor nodes, each with a sensing radius,
Virtual-force algorithms for node deployment
Two types of equations describe particle motion. The first equation type is a first-order differential equation, given by the following

or

where
The second type of equation is a second-order differential equation, generally of the following form

where the term on the left-hand side corresponds to particle acceleration, the second term on the right-hand side corresponds to a frictional damping force, and
Various inter-particle forces can be categorized into two types. In the first type, the force between particles is always a repulsive force. In general, these types of systems use a confinement force to limit the particles. The confinement force can be the centralized attracting force as for a dusty plasma system18,25 or a force added from the boundary, as in Howard et al. 14 In the second type, particles can have both a repulsive and an attractive force within each other (i.e. the Lennard-Jones force). 26 For such a case, when the distance between two particles is less than a particular threshold, a repulsive force occurs between them. When the distance is larger than the threshold, an attractive force occurs between them. When the distance is equal to the threshold, there is no force between them. In this physical system, interactions between the particles comprise a potential well for trapping particles at the threshold point. One popular approximation for the Lennard-Jones potential is given by the following

where
A system for virtual-force algorithm classification. Type I uses repulsive force only, while type II uses both a repulsive and an attractive force.

In equation (4), the damping term
We observed that among VF approaches of nodes deployment,10,14–17 only Garetto et al. 10 achieved a regular lattice (i.e. hexagon) for mass nodes. Thus, we only compared our simulation results with those reported in Garetto et al. 10
Virtual-force algorithm based on Yukawa potential
Dusty plasma particles18,25 interact in the classical physics regime, and particles inside this system are relatively easy to control and observe. Thus, this system has been extensively studied for basic phase transforms or kinetic theory.
28
In a dusty plasma system, the nonlinear equation of motion
18
for a dust particle

where the electrostatic potential

Here,
In the physical world, it has been observed that under this system, the resulting plasma, in a 2D setting, forms a hexagonal structure. 25 Inspired by this physical observation, we adopted the physical system for a dusty plasma as a basis for a novel virtual-force algorithm for node deployment. The resulting network topology is expected to be a hexagonal structure.
A molecular simulation was performed to emulate how sensor nodes move from an initial random deployment into a structured hexagon. A second-order leapfrog scheme was utilized for the time discretization in equation (6), as follows


where
For completeness, the pseudocode of the leapfrog schema solution for VFA-DP within the MSN is shown in Algorithm 1. To prevent the description from becoming cumbersome, we omitted details that could either be inferred or implemented using standard techniques.

Furthermore, for evaluating different virtual-force algorithms, it is important to have an objective measurement of system performance in two aspects, including the network topology and the convergence rate. Here, we introduce a novel performance metric based on the pair correlation function within the crystalline structure in order to evaluate the proximity from any network topology to a perfect hexagon and to compare the convergence rate of virtual-force algorithms.
The pair correlation function, denoted as

where
We define the distance measurement between any network topologies and a perfect hexagon, as follows
where
Pair correlation diversion provides an objective metric for evaluating virtual-force algorithms. The smaller the distance metric, the closer the network topology is to a perfect hexagon. Moreover, it can also be used to characterize the convergence rate of any virtual-force algorithm. Beginning from an initial node distribution, the pair correlation diversion decreases as the algorithm progresses. When the algorithm converges to a stable structure, the value remains within a stable level (due to the randomness of the simulation it may actually fluctuate a little over a small range). The slope of the pair correlation function curve, as a function of the simulation steps, indicates how fast the virtual-force algorithm converges.
Simulation results
In this section, we present our simulation results using the proposed VFA-DP as compared to the previous VFA-LJ. 10 In simulations for both algorithms, the coverage area is a square and is, initially, randomly covered by a number of sensor nodes. Initial node deployment is assumed to be uniformly distributed and is the same for both algorithms. Because each virtual-force algorithm corresponds to a different physical system, we adopted a normalized approach for time scale in order to obtain a fair comparison.
We first visualized the similarity between the resulting network topologies and a perfect hexagon. In Figure 3, the resulting network topologies, with the Voronoi region for each sensor node, for both the VFA-DP (cf. Figure 3(c)) and VFA-LJ (cf. Figure 3(b)) are compared along with initial node deployment (cf. Figure 3(a)). In Figure 3(b), notice that there are a few imperfect Voronoi regions located near the right-lower corner of the target area. As a comparison, there is no obvious non-perfect Voronoi region in Figure 3(c). Therefore, network topology resulting from our proposed VFA-DP was closer to a perfect hexagon than that from the previous VFA-LJ.

Node deployment for the virtual-force algorithms: (a) the initial node distribution, (b) the final node distribution for VFA-LJ, and (c) the final node distribution for VFA-DP. The network topology resulting from VFA-LJ has some defects, while the topology resulting from VFA-DP resembles a perfect hexagon.
As illustrated in Figure 4, the comparison can be made objectively using the pair correlation function
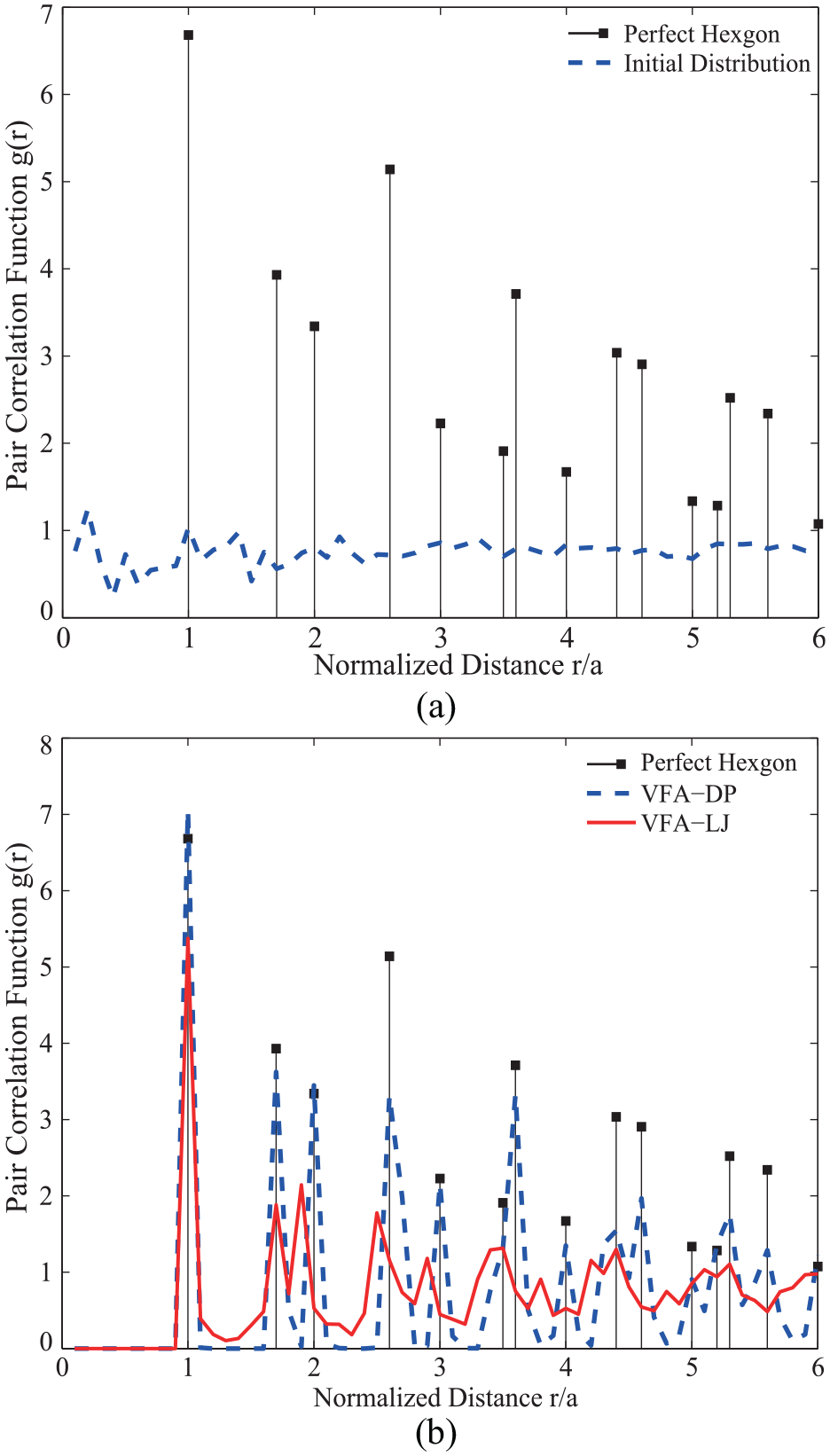
The pair correlation function: (a) for initial node deployment and (b) for the final node distributions (VFA-DP and VFA-LJ). The pair correlation function resulting from the VFA-LJ is misaligned with that for a perfect hexagon.
In addition, to evaluate the convergence rate of virtual-force algorithms, here, we leverage our proposed pair correlation diversion. The reader should note that energy consumption is proportional to the number of convergence steps. Thus, the faster the convergence rate, the less communication energy consumed. Users can adjust the calculation range of the VFA-DP to reduce the computational complexity and stop the VFA-DP based on the environment scenario and application requirements.
In order to compare the converge speeds of the VFA-DP and the VFA-LJ, in Figure 5, the calculation range of the VFA-DP was chosen to be slightly greater than one equilibrium distance
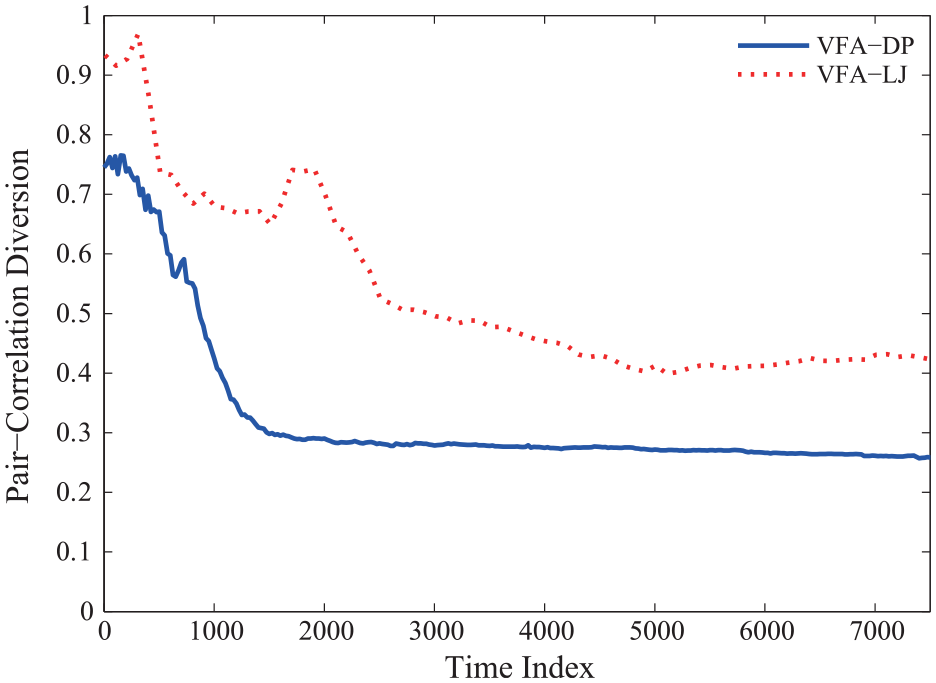
The pair correlation diversion decreases as the simulation steps increase. When the value is stabilized at a fixed value, the algorithm converges and the resulting network topology is stable.
As shown in Figure 5, our proposed VFA-DP converged much faster than the VFA-LJ and the converged diversion value of the VFA-DP was smaller than that of the VFA-LJ. For the same initial node deployment, the VFA-DP converged in approximately 1500 steps while the VFA-LJ converged in approximately 5000 steps, almost three times slower. The converged diversion value for the VFA-DP was approximately 0.2, while the diversion value for the VFA-LJ was around 0.4, indicating that the VFA-DP generated a better network topology. The difference may be caused by the fact that a dusty plasma system has a central confinement force, which can help the system fix defects in the initial distribution.
The dusty plasma system has a global attractive force that is related to pressure in the actual physical world. This pressure can help matter transform into a liquid or a solid crystal. As a result, it is no wonder that dusty plasma results in a better lattice and converges quicker. Systems using a Type II force (Table 1) can also utilize the attractive force to accelerate convergence and to achieve a better lattice. The central attractive force makes the method proposed in this article different from other virtual-force deployment methods due to partially centralized algorithms. Such are likely another example where centralized algorithms yield benefits to the engineering community. 29 In engineering, sensors should generally receive orders from center commanders and send collected information outward. As a result, it may not be an extra task for an engineering system to have a central attractive force.
For the Lennard-Jones potential in Garetto et al.,
10
the final node distance is also the equilibrium point of the potential field. For a dusty plasma field, it is not easy to predict the final node distance in the resulting network topology, which may not be good for engineers. However, in our proposed VFA-DP, the node distance can be adjusted by carefully choosing the spring constant

The normalized distance between sensor nodes for VFA-DP. The
Conclusion and future work
In this article, we investigated virtual-force algorithms for node deployment in MSNs, with an objective of formulating the hexagonal network topology for maximal coverage at a minimal cost (in terms of the number of sensor nodes required).
We proposed a novel virtual-force algorithm (VFA-DP) inspired by physical laws in a 2D dusty plasma system. As suggested by observations in dusty plasma, it would always formulate a hexagonal network topology. For evaluating the performance of virtual-force algorithms, we proposed a new metric based on the pair correlation function that characterizes the node distance distribution in a crystalline structure in order to objectively measure how close the resulting network topology is to a perfect hexagon and how fast the virtual-force algorithm converges. Numerical simulations indicated that our proposed VFA-DP outperforms the VFA-LJ for both criteria. Since our algorithm can converge with fewer simulation steps, the deployment method using the VFA-DP can make the nodes converge with fewer communication and movement steps, and consumes less energy for these functions.
However, the force field we proposed has two components. One is the repulsive force and the other is the confinement force. The balance of these two components makes the system converge into a regular lattice. While the Lennard-Jones type of interaction force just drives the system to the point that most of the neighboring particles distance is a zero-force distance, the Lennard-Jones system is fully distributed and can converge without a central force. However, we believe that it is this central force that makes our proposed VFA-DP have better performance than the VFA-LJ.
In addition, based on the theory and the equations, it is better to calculate the Yukawa potential and the corresponding velocity/acceleration for a given sensor node from enough nodes (in the calculation range) which need to be considered in the algorithm. It is more like a global calculation. One obstacle may affect the balance of the Yukawa potential calculation. In such a case, the proposed VFA-DP probably has more twisted structures than the VFA-LJ when we apply them in coverage areas with obstacles. The obstacle avoidance in these two algorithms is definitely an interesting topic which we want to study in the following project.
For future work, we will also focus on characterizing the communication and movement energy cost of the virtual force method, because minimizing energy consumption is a critical design challenge in sensor networks. Understanding the influence of the various physical parameters within the deployment process is also an interesting physical problem, as well as an engineering problem, which will provide guidance for engineering by aiding deployment in complex environment.
Footnotes
Acknowledgements
The authors thank Mr Yanhua Liu at University of New Hampshire for his support on VFA-LJ simulation and Professor Amitava Bhattacharjee at University of New Hampshire for sharing his insights in the dusty plasma.
Handling Editor: Luca Reggiani
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: R.T. was supported by the National Science Foundation of China (NSFC) grants 41674144 and 41974195, and the Open Projects Funding of Lunar and Planetary Science Laboratory from MUST (grant no. 119/2017/A3).