
Abstract
This paper describes an autonomous deployment and restoration of a Wireless Sensor Network (WSN) using mobile robots. The authors have been developing an information-gathering system using mobile robots and WSNs in underground spaces in post-disaster environments. In our system, mobile robots carry wireless sensor nodes (SN) and deploy them into the environment while measuring Received Signal Strength Indication (RSSI) values to ensure communication, thereby enabling the WSN to be deployed and restored autonomously. If the WSN is disrupted, mobile robots restore the communication route by deploying additional or alternate SNs to suitable positions. Utilizing the proposed method, a mobile robot can deploy a WSN and gather environmental information via the WSN. Experimental results using a verification system equipped with a SN deployment and retrieval mechanism are presented.
Keywords
Introduction
In disasters such as large-scale earthquakes, it is important to undertake disaster-mitigation activities for reducing damage and for early post-disaster rehabilitation and reconstruction (Kawata, Y., 1995). During such activity, the extent of damage should be determined promptly and accurately by gathering information on the disaster area. In particular, there is an increased need for information-gathering systems to confirm the post-disaster status of underground spaces such as subway stations and underground malls, because such spaces, owing to their relative structural solidity, are expected to be used as evacuation shelters and for storing emergency supplies. Disaster information-gathering systems in the form of artificial satellites, UAV (Unmanned Aerial Vehicles), balloon flights, etc., are mainly used to gather disaster information over a wide area. However, it is difficult to use these in underground spaces, and useful alternative methods for gathering information in such spaces have not been proposed yet. Moreover, many cases have been reported in which problems have actually been caused by existing disaster-prevention equipment that failed to work during a disaster. At present, rescue workers such as fire crews and rescue teams enter post-disaster underground spaces to determine the extent of damage due to the disaster. However, in such uncertain situations, because the rescue activities are limited compared to that above the ground level, personal suffering of rescue workers is high.
Based on the above scenario, the authors have been developing a Multi-Robot Sensor Network System (MRSN), in which multiple mobile robots such as high-mobility rescue robots deploy a Wireless Sensor Network (WSN) to gather disaster information in post-disaster underground spaces (Fig. 1). A WSN, consisting of a large number of small devices called Sensor Nodes (SN) (each equipped with wireless communication functionality, various sensors, a processor, and a power source) is a network system that can communicate and use sensing data gathered mutually by each spatially distributed SN. An ad-hoc network connecting each SN, one by one, can be constructed only by deploying a large number of SNs, and such a network can be enhanced very easily compared with wired and fixed networks. WSNs can provide various services by collecting and processing the information acquired by the SNs. WSN technology is expected to be applicable in many fields such as the cooperative monitoring of environmental conditions over a large area, sites where the construction of communication infrastructure is difficult, and in disaster-relief support.

Conceptual sketch of MRSN for gathering disaster information in underground spaces
We assume the following scenario for deploying a WSN via mobile robots in post-disaster underground spaces:
Under Japanese Building Standards Law, direct safety stairs leading above ground level for escape during a disaster are installed so that the walking distance in an underground space is not above 30 m. In our system, mobile robots linearly deploy WSN between such gateways for confirmation of the approach path of rescue workers (Fig. 2); the robots and WSN then gather and transmit information on the disaster.
WSN deployment scenario using mobile robots in a MRSN The robots loaded with SNs enter the underground space. At first, the robots move while confirming the communication status based on an operator's terminal, and deploy a SN. The WSN is linearly deployed by the robots repeating this movement and deploying each SN one by one, confirming the communication status between the SNs to the next gateway in the same way. Environmental information gathered by the MRSN is continually transmitted to the operators above ground level, and the disaster status within the space is thus determined. The operators gather information adaptively in a disaster situation by teleoperating the robots via WSN when necessary. The robots deploy additional or alternate SNs to necessary sites to restore communication links because of network disconnection due to unforeseen causes and/or problems with the SNs themselves.

The authors have developed a SN by relating it to use in post-disaster situations (Sato, H., et al., 2008; Sawai, K., et al., 2008) and to the teleoperation method for multi-robots via WSNs (Kimitsuka, Y., 2008). However, a number of problems arise because the environmental state of the disaster area is unpredictable when a WSN is set up by mobile robots in these situations.
It is difficult to ensure a communication route owing to a change in environmental factors such as obstacles, radio interference and radio wave conditions. The communication route may be disconnected because of battery drain, SN failure, etc.
Therefore, in such unforeseeable circumstances, a WSN should be deployed adaptively by mobile robots by ensuring communication connection between SNs. In addition, it is necessary to maintain the function of an information-gathering network by continually determining the state of the WSN and recovering the communication route if necessary. Thus, in order to solve the above-mentioned problems and achieve the scenario, this paper proposes an autonomous WSN deployment and restoration method using mobile robots, including the following strategies:
The adaptive deployment of a WSN with consideration of the communication status. The restoration of the communication route by deploying additional and alternate SNs when the network is disconnected.
Experiments verifying the proposed method by testing WSN deployment, restoration, and environmental information-gathering using the prototype MRSN system are also described.
The rest of the paper is organized as follows: Section 2 describes related research. Section 3 explains the autonomous deployment and restoration of WSNs by mobile robots. Section 4 details a prototype system for verification of the proposed method, and Section 5 evaluates system conditions and sensor properties via preliminary experiments, before applying the proposed method through the experiments described in Section 6. Section 6 shows the experimental setup and the results of autonomous WSN deployment and restoration using the MRSN prototype system. Concluding remarks are given in Section 7.
Studies of the manual deployment of SNs on building ceilings, streetlights, etc., for preemptive disaster-area information-gathering (Kurabayashi, D., et al., 2001) can be found in rescue research projects (Tadokoro, S., et al., 2003). Preemptively deployed fixed SNs can gather continuous information at any time before a disaster occurs. However, their functionality following a disaster cannot necessarily be guaranteed. Human resources are often insufficient to deploy the SNs. Moreover, humans could be hurt by secondary disasters during information-gathering activity.
An autonomous construction of WSNs has been previously discussed in conventional studies on SN deployment. The methods proposed in these studies consist mainly of randomly scattering many low-cost SNs, constructing WSNs with mobile SNs, etc. (McMickell, M., et al., 2003; Dantu, K., et al., 2005; Parker, L. E., et al., 2003). However, in the scattering deployment method, there is a possibility that the SNs may not necessarily be deployed to the desired locations. Although it may be possible to evade such a problem by scattering a massive number of SNs, the costs and increased communication traffic associated with the deployment of a large number of SNs may prove problematic. In WSNs composed of Mobile Sensor Nodes (MSNs), these can be deployed to any position desired. However, MSNs are generally expensive. Moreover, the SNs do not necessarily all need to move, depending on the environment. In general, system cost is a significant problem because a large number of SNs are needed to gather information over a large disaster area. Therefore, it is necessary to consider the costs of the SNs and thereby reduce the energy costs for the entire system.
Other methods for SN deployment have been proposed; these have been based on achieving maximum communication or sensing range using MSNs or mobile robots (Batalin, M., et al., 2002; Miyama, S., et al., 2003; Sugano, M., et al., 2006) and deployment by virtual interaction between SNs based on physical models (Howard, A., et al., 2002; Pac, M. R., et al., 2006). However, these studies assume that it would be difficult to ensure communication between SNs owing to environmental factors such as obstacles and radio interference that could block communication channels. Moreover, it is possible for communication between SNs in WSNs to be interrupted owing to SN battery drain or device failure. Therefore, it is essential that the status of WSNs is known at all times, in order to ensure communication between SNs and to maintain their collective functionality as an adaptive information communication network. In related research, the deployment and repair of the sensor network by UAV was proposed (Corke, P., 2004). However, it is difficult for an UAV to move in the rubble and in underground spaces.
Autonomous WSN Deployment and Restoration based on Received Signal Strength Indication (RSSI) value between SNs by Mobile Robots
In our approach, we assume that the SN cost problem is solved by using low-cost SNs that can perform the minimum functions necessary for environmental information-gathering. Moreover, the energy cost problem is expected to be solved by enabling high-mobility robots to deploy WSNs. Therefore, a WSN deployment method using mobile robots is essential.
The robots manipulate fixed SNs and adjust the spatial range of the WSN and network topology of the WSN adaptively according to the conditions of the post-disaster environment. In order to ensure communication between SNs, the RSSI value is monitored while the robot-deployed SNs are in transit to their designated locations. The robots confirm whether the SNs are able to communicate with one another, and deploy SNs while ensuring communication channels between them. This proposed method is expected to enable the deployment of WSNs adaptable to changes in signal conditions caused by environmental interference.
After this WSN is deployed, the circumstances under which it would be unable to continue functioning are estimated by assessing the amount of battery drain that would result in the failure of a SN. The robots can then specify the necessary details for a replacement SN by using positional information recorded when the original SN was deployed (odometric information, for instance). When a signal can be received from the SN, the accuracy of the detection of its location is improved using the RSSI value. Finally, the mobile robot moves to the location of the target SN, the additional or alternate SN is deployed, and the function of the WSN is maintained.
Figure 3 shows an algorithm for the deployment and restoration of a WSN by mobile robots based on the above proposal. Only the path of motion of the robots is given by the operator, and the robots then deploy the WSN, ensuring connection between SNs by measuring the RSSI value autonomously. They also detect any abnormalities in the SNs and resolve encountered problems by deploying additional or alternate SNs to suitable positions. The robots distinguish between the SNs by referring to their unique IDs.

WSN deployment and restoration algorithm using mobile robots
A mobile robot begins to move to the given target coordinates via the operator's instructions. The robot receives the SN status and sensor data via the WSN while moving, and confirms the status of the SN. If the status of the SN is normal, the robot obtains the RSSI value of the adjacent SN. The robot refers to the status and the RSSI value from the operator's terminal for the initially deployed SN. The robot stops in a location where the average of the measured RSSI values falls below a previously determined threshold, and the SN is then deployed. The robot stores the SN's ID and position coordinates obtained from odometric data. If information is not obtained or an abnormal state is received from the SNs, the robot retrieves location data corresponding to the IDs of the relevant SNs, and then moves to the position of the SN. The robot communicates with an SN evaluated as being abnormal. If a signal from the SN can be received and its status is normal, the robot determines that communication must have been disconnected by a change in the environment. The robot thus deploys additional SNs while measuring the RSSI values of nearby SNs to repair the connection. If a signal from the SN cannot be received or the SN cannot maintain its function because of battery draining, the robot deploys an alternate SN within the communication range of nearby SNs while measuring the RSSI values. When some abnormal SNs are detected simultaneously, the robot restores the communication route from the nearest SN.
A SN deployment and retrieval mechanism was developed to verify the proposed method, which was applied to a mobile robot. This section describes the SN, mobile robot system, and SN deployment and retrieval mechanism used as a verification platform system.
Sensor Node
In this system, a Mica2 MOTE with a MTS300 sensor board by Crossbow Technology, Inc. was used as the SN (Fig. 4 (d) and Table 1). The initial MOTE packet structure was “destination SN ID, data type, group ID, packet length data, and sensor data” of maximum 29 bytes. We restructured the packet as “source SN ID, destination SN ID, remaining battery level for SNs' status evaluation, and sensor data” by modifying the MOTE application. Therefore, the robots could confirm the status of SNs and their sensing data via the WSN. The robot could also obtain the RSSI value between SNs by using the MOTE application, deploying SNs as necessary by estimating the communication status using this value.

Configuration of SN deployment and retrieval system
Specifications of MICA2 MOTE

An omni-directional mobile robot (Asama et al., 1995) was used as the mobile robot platform (Fig. 4 (a)). The robot has a control PC, driving actuators, an omni-directional vision camera, infrared range sensors and batteries, and can move to the target coordinates while obtaining odometric information. A MOTE with serial interface board MIB510 was connected to the robot's PC to communicate with deployed the SNs.
Sensor Node Deployment and Retrieval Mechanism
A deployment and retrieval mechanism employing a screw and nut configuration was developed for carrying MOTE-sized SNs and deploying or retrieving them, which was then mounted on the robot (Fig. 4 (a)). This mechanism comprises of a “SN tray”, and a “guide and screw part” for handling the SN tray (Fig. 4 (b)).
The SN tray is a resin (MC nylon) molded regular octagonal product with a hollow that can store up to two MOTE-sized SNs and that corresponds to the nut of the lead screw mechanism. The center of the SN tray is tapped according to the screw, and the SN tray can be moved vertically according to the guide by installing the screw.
The lead screw is 20 mm in diameter, has a 10 mm pitch, and is 200 mm in length and rotates via a stepping motor (Motor 2 in Fig. 4 (b)). The SN tray moves up and down by 10 mm (one screw rotation) so that the orientation of the SN tray is maintained by the guide. The height of the SN tray is retained by stopping the screw. The number of SN trays that can be loaded is decided according to the length of the screw, and up to ten SN trays can be installed in the prototype. The point of the screw is designed so that it tapers and can be installed in the screw hole of the SN tray. A vertical motion of the screw and guide part can be adjusted by a translation actuator driven by another stepping motor (Motor 1 in Fig. 4 (b)). Figure 5 shows the sequence of SN deployment.

Sequence of SN deployment
The SN tray is retrieved by the reverse procedure of Fig. 5. Accuracy of position and orientation control is required for such retrieval tasks in general. However, in this mechanism, the SN tray is pushed and positioned by the guide even if the robot experiences some movement errors. Therefore, the screw can be installed in the position of the screw hole, and the robot can execute a retrieval task smoothly.
Determining Threshold of RSSI taking into Account Communication Status Between SNs
In the WSN deployment and restoration method proposed in this paper, it is essential to decide on the threshold for the RSSI as a critical value with which the robot determines the deployment position necessary for stable communication between SNs in the environment. Therefore, typical communication between the SNs was investigated in the below-mentioned experimental environment. Here, the RSSI value between two SNs stored in the SN trays was measured. Figure 6 shows an experimental result. The typical RSSI value of MOTE was ascertained as −100 dBm at about 0.5 m when stored in the SN tray; packet loss was confirmed frequently at this distance or greater. It was concluded that the communication route could therefore be assured by setting the threshold over −100 dBm when the mobile robot deployed SNs. We decided on a threshold of −70 dBm, including a safety margin because the robot moves while measuring RSSI values and deploys SNs at various locations after this value is below the threshold. The MOTE communication distance was shortened by storage in the SN tray. This was due to deterioration in communication by having stored the MOTE antenna in the SN tray given that the robot must remain portable, and having placed the SN tray directly on the floor.

RSSI value between SNs
Therefore, it will be necessary to modify the tray configuration and deployment method to improve communication. However, the aim of this paper is to verify the method of WSN deployment and restoration by mobile robot, and improvements in the communication performance of the system will be attempted in future work.
Illuminance data was gathered by the WSN for use as sample data of the system. This is because fire fighting and prevention of fire spreading, which occurs after a disaster, are important, and rescue workers must record the fire incident in addition to undertaking rescue efforts in a post-disaster environment. Thus, illuminance is used as data for the detection of fire symptoms.
In this experiment, illuminance in the environment was measured by an onboard MOTE optical sensor, CdSe photocell. Moreover, illuminance was also measured for use as comparison data using a digital illuminometer (silicon photodiode mounted on LX-1332D of CUSTOM), which is able to measure up to 200,000 lx. A lamp was used as the light source.
The relative position of the light source and the onboard MOTE optical sensor was adjusted depending on the deployment orientation of the SN tray when the MOTE was stored in the SN tray. Thus, the relation between the value of the MOTE optical sensor when stored in the SN tray and the deployment orientation of the SN tray was examined in the experimental environment (described below) with the light fixture turned off.
Figure 7 shows the result of averaging 40 data sets of sensor output at various orientation angles. It was confirmed that the illuminance data could be used as environmental data because the data was attenuated in proportion to the distance between the SNs; however, a difference in data was observed according to the position of the SN tray over a short distance. Moreover, the typical distance between optical sensors for each position of the SN tray was determined.

SN optical sensor property
Autonomous Adaptive WSN Deployment and Restoration using Mobile Robots
The proposed method was installed on the above-mentioned robotic system, and the WSN deployment and restoration experiment was executed in an environment consisting of an indoor passage (height: about 2.24 m; width: about 1.77 m; total length: about 40 m) of a ferroconcrete building. The experiment was carried out at nighttime, assuming that the light fixture fails in a post-disaster environment. In this experiment, five SN trays each with a MOTE were used, and the communication routing path was decided statically when SN trays were deployed.
An underground space has earthquake resistance because of its structural solidity (Godard, J. P., 2004). Therefore, it is assumed that the extent of structural collapse is limited and that the environmental structure is maintained. The focus of the experiments was the WSN deployment method based on environmental conditions in terms of communication. Therefore, it was assumed that the environmental structure had not collapsed, and only lighting-equipment damage was assumed in the experiments.
Figure 8 shows an experimental scenario. Motion path of the robot is given by an operator. A robot deploys the initial SN (SN1 in Fig. 8) after receiving instructions regarding WSN deployment. Then, the robot moves along this path while measuring the RSSI value of SN1, and SN2 is deployed at a location at which the measured RSSI value is below the threshold of −70 dBm. The robot deploys the WSN, repeating the placement of SNs on the floor, one by one, based on the threshold, while measuring the RSSI value of the nearest SN. Furthermore, the functional decline of a deployed SN by battery drain is simulated in order to verify the restoration function by which communication is maintained. When the robot detects a disruption to the network or abnormality in an SN of the deployed WSN, the robot identifies the target SNs through their IDs and localizes them using odometric information recorded when they had been deployed. If a signal can be received from the target SN, the accuracy of the detection of its location is improved using the RSSI value. Then, the mobile robot moves to the location of the target SN and deploys an additional or alternate SN within the range of communication of nearby SNs while measuring RSSI values for maintenance of the WSN.

Scenario of actual experiment
Based on the above scenario, experiments on WSN deployment and restoration by mobile robot were carried out. Figure 9 shows an experimental example. The pictures from (a) to (d) in Fig. 9 show the robot deploys SN1 to SN4 for WSN deployment while moving along the route instructed by the operator (straight line trajectory). In this example, simulated data regarding battery drain was transmitted from SN1. Figure 9 (e) shows the robot detects an abnormality in SN1 by communication via WSN, before then moving to a nearby location using odometric information recorded when SN1 was deployed. The robot then deploys an alternate SN, SN5, within the communication range based on RSSI value of SN2 to restore the WSN ((f) in Fig. 9). The trajectory of the motion path for WSN restoration is given by the operator. However, each SN's location and the location of alternate SNs to be deployed are recorded and executed by the robot autonomously.
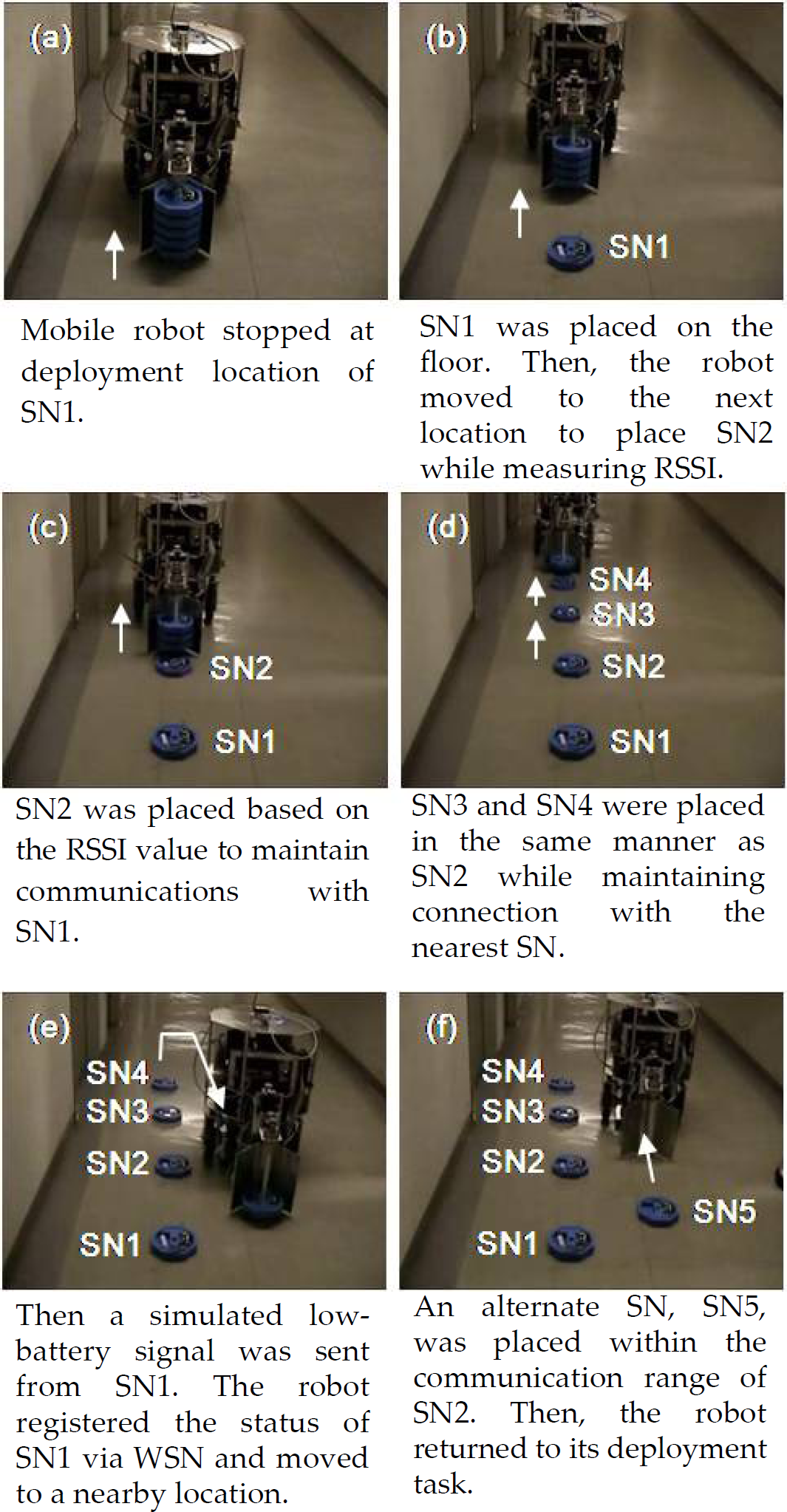
Actual experimental example of autonomous adaptive WSN deployment and restoration using prototype MRSN system
Figure 10 shows the distance between deployed the SNs. A difference of up to 0.1 m (about 20% of the average deployment distance between the SNs) was observed between each SN. The distance between the SNs differed in each experiment. It is believed that the deployment position of the SNs was adaptively decided by the robot according to environmental factors, the individual characteristics of the SNs, etc. Moreover, the WSN restoration function was confirmed by detecting the status of the SNs via the WSN and by deploying alternate SNs when abnormal states occurred in a part of the WSN after deployment. Thus, the effectiveness of the proposed WSN deployment and restoration method that takes into account the communication status using mobile robots was verified.
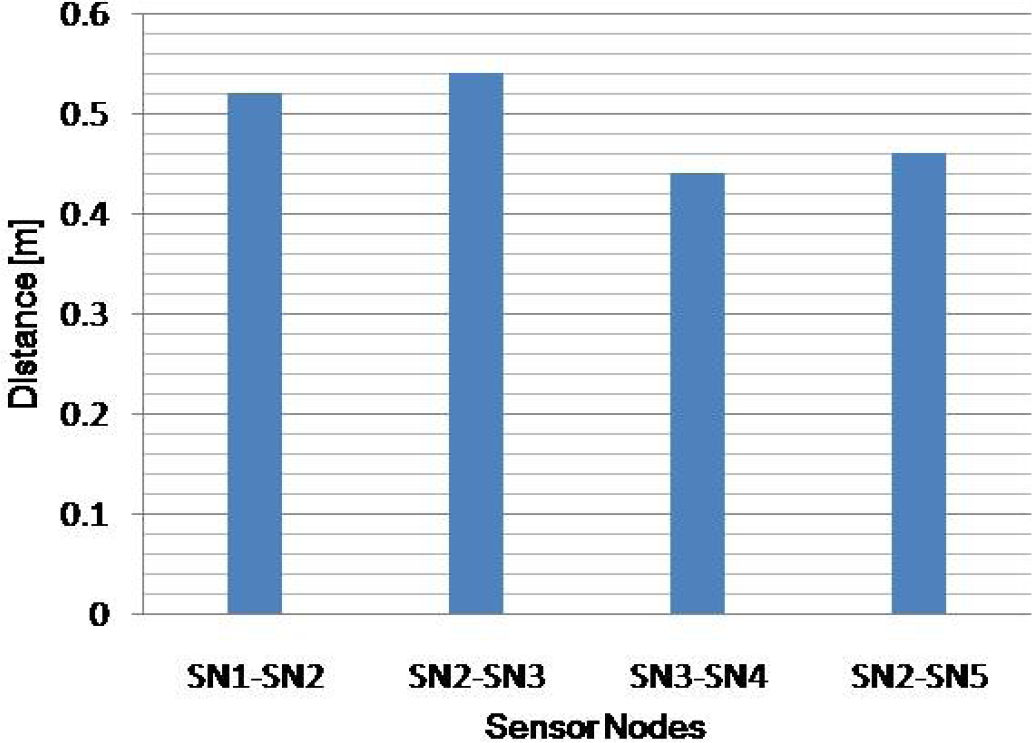
Example of distance between SNs deployed by mobile robot
In this experiment, the average speed of the robot when moving was 0.52 cm/sec, the average deployment time was 4.8 min, and the average time until restoration (by deploying SN5) was 7.5 min, because the robot had to stop for RSSI value measurement. Therefore, it is necessary to improve the motion speed of the robot using a sampling period of RSSI measurements based on the communication property of the SN in order to enable the WSN to be deployed over a long section more quickly.
Illuminance data for use as environmental information was detected and gathered by applying the WSN deployed and restored by the mobile robot. Figure 11 shows the experimental situation. The experiments were carried out in both the deployed WSN ((a) in Fig. 11) and the restored WSN ((b) in Fig. 11) for verifying the effectiveness of the WSN deployment and restoration. The light source (lamp) was placed 0.2 m from SN1 in each WSN. When an illuminance data was gathered by WSN, the light fixture in the passage and the lamp were turned off at first. WSN then started to detect and gather illuminance data. The lamp was lit in 30 sec after the start of detection, and light was held for 30 sec. The lamp was turned off for another 30 sec. Therefore, an illuminance data was measured for 90 sec in total in each WSN. Data from each SN was transmitted to the robot via the WSN.

Experimental setup for measuring illuminance
Figure 12 shows the result obtained by data detected using the deployed WSN. This result shows that the change in illuminance and relative position between the light source and SNs can be detected by taking into account the typical distance between optical sensors; however, a detection delay and error margin of a few seconds were found in SN2. Figure 13 shows the result obtained from data detected using the restored WSN. The communication and sensing function of SN1 was supplemented by the alternate SN, SN5; however, in contrast to Figure 12, a measurement error was found at the position at which SN5 was deployed. Thus, the effectiveness of the WSN restoration was confirmed.

Result of gathering illuminance information by deployed WSN (Fig. 11 (a))

Result of gathering illuminance information by repaired WSN (Fig. 11 (b))
This paper has focused on a WSN deployment and restoration method based on communication conditions. In this paper, the key result is that autonomous WSN deployment, restoration, and information-gathering can be achieved adaptively according to the communication conditions regardless of the communication distance of the SNs. However, it is difficult to apply this prototype system to actual post-disaster situations. Therefore, we are now developing new spherical SNs and crawler robots for WSN deployment and gathering information in post-disaster situations based on the findings obtained from the experimental results (Sato, H., et al., 2008; Sawai, K., et al., 2008) (Fig. 14). A passive pendulum mechanism for maintaining the position of sensors and an impact-resistance capability achieved via a soft outer shell are installed in the SNs to be employed in the disaster areas. This SN can communicate over a distance of 10–30 m in indoor spaces by using EEE802.11b. Moreover, the amount of information gathered is increased by installing an omni-directional fish-eye camera sensor. The crawler robot can move over a rough terrain by using its crawler and flippers, and its speed when moving is about 12 m/min. In the assumed environment shown in Fig. 1, taking into account the range of mounted sensors, we estimate that this robot can connect between stairs 30 m by deploying about five SNs. It is believed that the time required for the deployment is about five minutes. The proposed method in this paper will be applied to new robots and SNs. These component technologies are integrated, and the performance of the MRSN must be further developed and improved to enable it to be applied practically to gather information on the effects of disasters in underground spaces.

(a) Crawler robot, (b) SN with passive pendulum mechanism, (c) Soft outer shell for impact-resistance capability
This paper has proposed an autonomous deployment and restoration method for WSNs, deployed by MRSNs, acting as post-disaster information-gathering systems in underground spaces. A SN deployment and retrieval mechanism was developed and mounted on a mobile robot for verifying the proposed method. In this method, the robot deploys the SNs based on the RSSI values between the SNs. Therefore, it is possible to deploy a WSN that adapts to communication conditions in the environment. Moreover, the robot restores the communication route by deploying additional or alternate SNs to suitable positions when the WSN is disconnected for any reason. It was experimentally confirmed that the robot could deploy and restore the WSN and gather environmental information using the proposed method.
It will be necessary in future work to discuss appropriate operational methods for the MRSNs that consider the characteristics of multi-robot systems and WSNs, for example, reductions in network traffic, routing approaches, sensor data processing, multi-robot cooperation, etc.
Footnotes
9.
This work was partially supported by the Research Institute for Science and Technology of Tokyo Denki University, Grant Number Zb06-01 / Japan.
We are grateful Takayuki Tsubonuma who was an undergraduate student of Tokyo Denki University in 2005. He developed the prototype of the Sensor Node Deployment and Retrieval Mechanism.