
Abstract
In the 5G era, integration between different networks is required to realize a new world of Internet of things, the most typical model is Space–Air–Ground Internet of things. In the Space–Air–Ground Internet of things, unmanned aerial vehicle network is widely used as the representative of air-based networks. Therefore, a lot of unmanned aerial vehicle “black flying” incidents have occurred. UAVs are a kind of “low, slow and small” artificial targets, which face enormous challenges in detecting, identifying, and managing them. In order to identify the “black flying” unmanned aerial vehicle, combined with the advantages of 5G millimeter wave radar and machine learning methods, the following methods are adopted in this article. For a one-rotor unmanned aerial vehicle, the radar echo data are a single-component sinusoidal frequency modulation signal. The echo signal is conjugated first and then is subjected to a short-time Fourier transform, while the micro-Doppler has a double effect. For a multi-rotor unmanned aerial vehicle, the radar echo data are a multi-component sinusoidal frequency modulation signal, the k-order Bessel function base and the signal are used for integral projection processing, which better identifies the micro-Doppler characteristics such as the number of rotors or the rotational speed of each rotor. The noise interference is added to verify that the algorithm has better robustness. The micro-Doppler characteristics of rotor unmanned aerial vehicles are extracted by the above algorithm, and the data sets are built to train the model. Finally, the classification of unmanned aerial vehicle is realized, and the classification results are given. The research in this article provides an effective solution to solve the problem of detecting and identifying unmanned aerial vehicle by 5G millimeter wave radar in the Internet of Things, which has high practical application value.
Keywords
Introduction
In the 4G era, we realize the mobile Internet, but different networks are independent of each other. In the 5G era, integration between different networks is required to realize a new world of Internet of Things, 1 the most typical model is Space–Air–Ground Internet of things (IoT). Figure 1 shows the Space–Air–Ground IoT, and the air-based network plays a very important role as a bridge between the space-based network and the ground-based network. In the air-based network, the most widely used is the unmanned aerial vehicle (UAV) networks. UAV has a very wide application scenario due to its advantages of flexible deployment, low cost, and no casualties. In recent years, the number of UAVs has increased dramatically. There are plenty of UAVs in the sky over airports, stadiums, government, and more. In addition to normal communication functions, the use of UAVs for border smuggling, drug trafficking, and “black flying” has gradually increased, which has brought serious security risks. Therefore, our demands for detecting and identifying UAV are also growing.
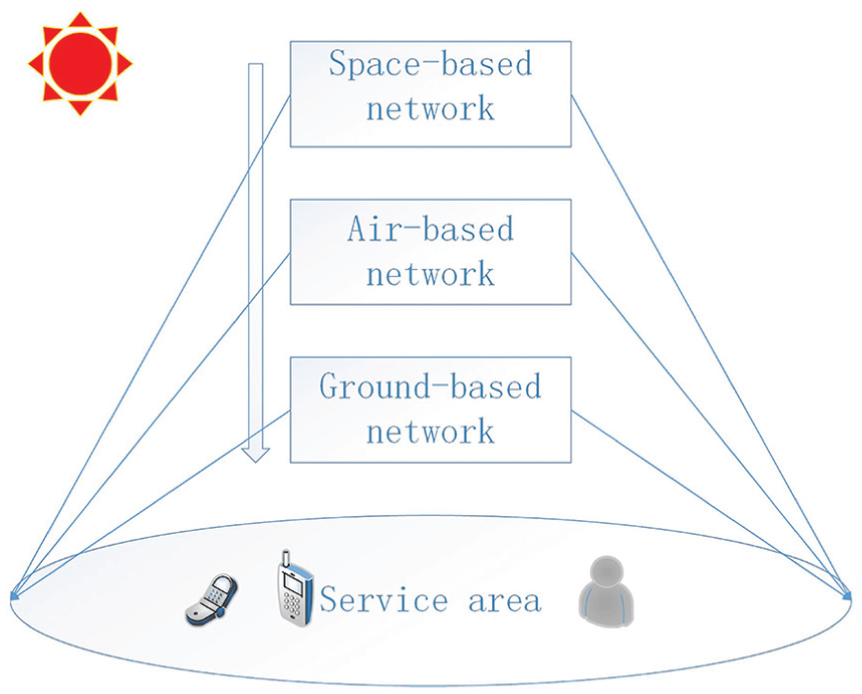
Space–Air–Ground IoT.
UAVs are “low, slow, and small” (low flying altitude, slow flying speed, and small radar cross-section (RCS)) artificial flight targets. Ordinary methods of detecting them are highly limited. Radar can detect and locate targets all day long, which is not affected by light and weather, and has the advantage of long range. Therefore, the application of detecting UAV by radar has become one of the key research topics in the field of target detection.
Micro-motion is a movement of a particular structure of a target which is under a specific force and is usually a “unique” motion state of the target, belonging to the fine features. Since micro-motion is a small movement, its controllability is low, and its imitation is very difficult. Therefore, using radar to detect targets with micro-motion characteristics has great development potential. One of the most obvious micro-motion characteristics of UAV is the micro-Doppler effect caused by the rotation of its rotor. In more recent years, there are many methods to extract the target micro-Doppler characteristics in various radar systems.2–7 The micro-Doppler information can be analyzed in time–frequency domain to detect and classify UAVs.
Target recognition by radar must rely on effective target feature classification techniques, which is pattern recognition techniques. Machine learning and deep learning are better applied to pattern recognition and provide a feasible research direction for identifying UAVs by radar. Using the pattern recognition method to model the complex sample space, these models also describe various important variations of the sample space. Compared with traditional statistical recognition, this method has the advantage of high information utilization. Automatic identification of UAVs by machine learning is an important research direction based on the micro-Doppler effect of radar targets. It has obtained preliminary application in some security weapon systems. In order to identify and classify targets by radar, the target feature data need to be acquired first, which constitutes the feature data sets. The target feature data in this article are obtained by computer simulation data.
The research goal of this article is to extract the micro-Doppler characteristics of the UAV through the micro-Doppler effect under the radar and then use the machine learning method to realize the accurate identification and classification of UAV and unknown UAV. Organization structure is as follows: Section “Related works” introduces three existing techniques for detecting and identifying UAVs, and highlights the innovations and contributions of this article. Next section briefly introduces the block diagram of Space–Air–Ground IoT network and UAV networks. Third, the key technologies of 5G and the frequency points used in this article are discussed. Then, the micro-Doppler effect of the rotating blades under 5G millimeter wave is analyzed, and an improved short-time Fourier transform (STFT) method is proposed. The simulation results show that the method improves the recognition effect of one-rotor UAV. After that, the projection principle of sinusoidal frequency modulation (SFM) signal and Bessel function base is analyzed, and its accuracy and robustness are verified by simulation, which solves the problem of multi-rotor UAV recognition. Based on training the feature vectors collected by the simulation results, the radar target classification is achieved. Finally, the conclusion is given. The system model is shown in Figure 2.

System model.
Related works
There are currently three common techniques for detecting and identifying UAVs: computer vision, STFT, and capture remote-control signals.
Jiang et al. 8 use computer vision to identify UAV. The camera is deployed as that, multiple camera arrays form one node, and multiple node groups form a visual sensing network. The entire visual sensor network is then used to capture the images and information of the UAV. The feature information corresponding to the UAV is extracted from the captured computer image and then introduced into the deep learning neural network. The UAV is identified and classified through the learning and training of a large number of data sets. However, this method is greatly affected by nighttime and extreme weather and can only be identified with high visibility.
Jian et al. 3 use the STFT method to detect UAVs. The radar transmits a signal to the target, and the micro-motion of the target causes the frequency modulation on the carrier frequency signal. For targets that rotate at a certain frequency or have other micro-motions, in addition to the Doppler shift of the main part, it also occurs near the center band of the carrier frequency. The radar signal is processed by STFT, the micro-Doppler effect is analyzed, and the features are extracted to better identify the one-rotor UAV. However, for the multi-rotor micro-Doppler effect, aliasing of multi-component time–frequency domain signals will occur, which makes this method limited to identify multi-rotor UAVs.
Both the patent 9 and Zhang 10 detect and interfere with the UAV by capturing the remote-control signals. As a highly integrated frequency equipment, UAV communicates with remote control by electromagnetic waves. Therefore, it is easily interrupted by communication data links caused by electromagnetic wave pulse bombs, high-power microwaves, and other directional weapons. So, this method can successfully interfere with the UAV. But when the UAV takes a silent flight, this method will fail.
The main innovation of this article is to propose an improved UAV identification method to solve the problem of poor robustness using common methods. For the one-rotor UAV, the self-conjugate processing of the millimeter-wave SFM, the m-D is doubled, which improves the identification effect of the one-rotor UAV. For the multi-rotor UAV, by integrating the echo signal with the introduced k-order Bessel function base, the rotational speed and length of each rotor are better recognized. The effectiveness and good robustness of the algorithm are verified by simulation. Machine learning training is performed on the extracted features, which greatly improves the recognition efficiency. It can detect and identify UAVs around the clock, supplementing the shortcomings of previous literature. The contribution of the method proposed in this article is to effectively avoid the use of UAVs for border smuggling, drug trafficking, and “black flying” and to better maintain the safety of airports, stadiums, government, and other places.
Space–Air–Ground IoT network and UAV network
Figure 1 is the block diagram of Space–Air–Ground IoT network. It comprises three main segments: space-based network, air-based network, and ground-based network. Among them, the space-based network is the satellite network, the air-based network is mainly the UAV network, and the ground-based network is cellular network. 11 In Space–Air–Ground IoT, the air-based network plays a very important role as the bridge between the space-based network and the ground-based network. In the air-based network, the most widely used is the UAV network. UAV formation flight becomes the key technology of the UAV network. In the collaborative control of UAVs, the “Leader-Follower” model is widely used. In this model, the leader UAV plays the most important role in formation. For example, the leader UAV communicates with the BSs, and it contains the fusion center, formation leader, and the network gateway. Other UAVs fly according to the instructions of the leader UAV.
In the UAV network, a lot of IoT devices can be carried on the UAV. For example, if the UAV carries a sensor, such as a camera, it can be used to collect information. Based on the energy requirements, the collected data can be processed locally on the UAV or offloaded to the server on the ground. 12 If the UAV carries a wireless access point device such as WiFi, then it can be used as a temporary base station to provide emergency services to designated areas. This kind of scene is very common in stadiums. From above, we can conclude that UAV has a very broad application prospect.
Detecting UAV based on 5G technology
In existing 3G and 4G networks, operators are gradually adopting network function virtualization (NFV) and software-defined network (SDN)13,14 technologies to implement information and communications technology (ICT) network device virtualization, but these network slicing channels do not have artificial flying targets such as UAVs, and they also have large network delays. However, the commercial 5G era is coming, and the US Federal Communications Commission (FCC) has also auctioned commercial millimeter-wave bands—the 24, 28, 37, and 39 GHz bands for 5G commercial use. The future 5G high-frequency networking, with its high bandwidth and good beamforming (BF), can cope with massive device connections and emerging new business scenarios in the future, identifying and supervising UAVs for example. In addition, 5G network architecture will also deploy communication channels for artificial air targets, 15 that is, network slice channels for detecting, identifying, and managing UAVs.
There are two main frequencies for UAV and remote communication: 2.4 and 5.8 GHz. The communication signal between the remote controller and the UAV is captured by the spectrum analyzer, and its amplitude–frequency characteristic is shown in Figure 3.

Amplitude–frequency characteristics of remote-control signals.
It can be clearly seen from Figure 3 that there are many other low-frequency clutters besides the main frequency of communication, so these low-frequency clutters must be avoided when collecting target data and high-frequency millimeter wave radar (MMW) radar must be adopted. Therefore, the radar used to detect the UAV in this article works in the K-band with a frequency of 28 GHz. Through the above analysis, it can be known that with the determination of commercial millimeter-wave band in the 5G network and the full deployment of the infrastructure, capturing UAV data through a 5G network 16 and applying subsequent algorithms make it possible to detect and identify UAVs.
Micro-Doppler effect of rotating rotor blades at 5G millimeter waves
Studying the mathematical principles of traditional methods by referring to existing books and literatures, the micro-Doppler effect of rotating targets in radars has similarities and differences with different radar systems. Landon Garry and Smith 17 studied the similarities and differences of micro-Doppler effect between rotating targets and rotors under common radar systems (narrowband radar, broadband radar (linear frequency modulated (LFM) signal system radar, LFM stepping signal system radar, and LFM continuous wave signal system radar), and double base radar), this article will analyze a suitable theory of rotational mathematics based on the actual situation of my laboratory.
Micro-motion is not only the unique motion state of the object but also a fine feature. One of the most obvious micro-motion characteristics of the UAV is the radar micro-Doppler effect generated by the rotor rotation. Recently, many works7,18,19 have analyzed its micro-Doppler characteristics to identify and classify UAVs, but they have not solved the problem of multi-rotor UAV recognition.
The m-D frequency shift is a time-varying frequency shift which could be extracted from the complex output signal of orthogonal phase detectors used in conventional Doppler processing. The m-D effect is sensitive to the signal frequency band. For radar systems operating in the microwave frequency band, if the product of target oscillation rate and vibration displacement is sufficiently large and the sampling rate satisfies the Nyquist sampling law, the micro-Doppler effect can be observed. The echo signal of the UAV is a multi-component SFM signal. To analyze its time-varying frequency characteristics, the Fourier transform is not applicable because time-dependent frequency information cannot be provided. Instantaneous frequency analysis and joint time–frequency analysis are the common methods to describe signals in both time domain and frequency domain. The instantaneous frequency obtained by the time-derivative operation only produces the value of the frequency at a given moment, which means that it is only suitable for single-component signals and not for multi-component signals. The joint time–frequency distribution has been used to analyze time-varying spectrum for decades. It is designed to locate the energy distribution of a given signal in a two-dimensional time–frequency domain. It can analyze both single-component signals and multi-component signals.
MMW radar backscatter of rotating rotor blades
The geometric relationship between UAV rotor blades and radar is shown in Figure 4. In the spatially fixed coordinate system
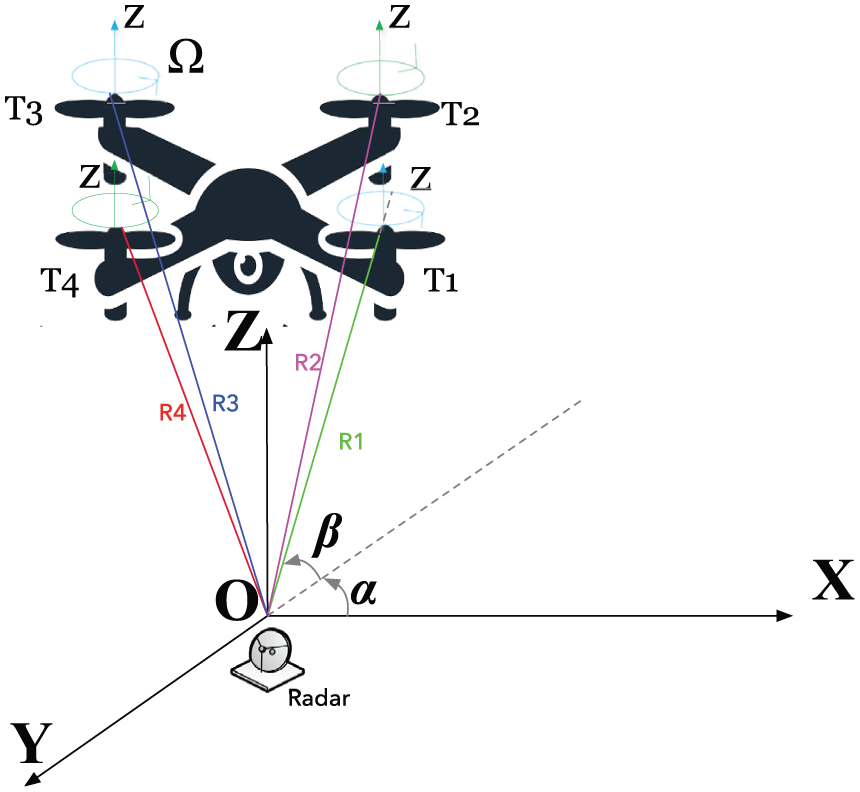
The geometric relationship between UAV rotor blades and radar.
From the point of view of electromagnetic scattering, it is composed of many scattering centers for each blade of the rotor. Each scattering center is considered to be a point with a certain reflectivity. Let
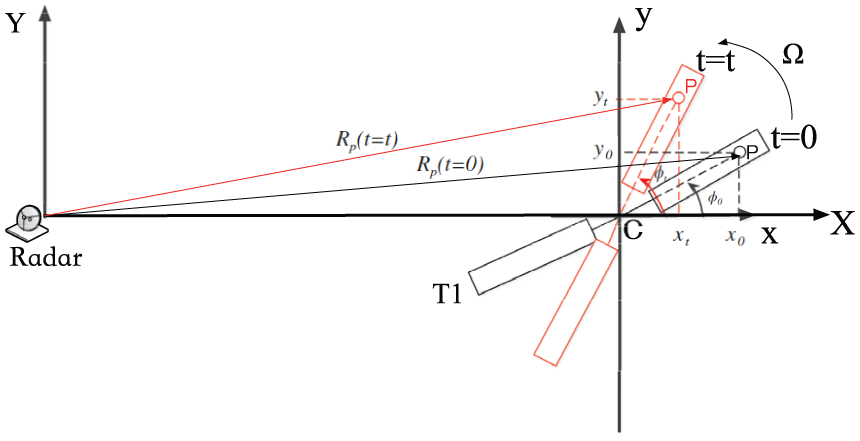
Mathematical model of radar and a certain rotor of multi-rotor two-blade UAV.
From the above, the distance from the radar to the scattering point P is

In formula (1),

In formula (2),
In practice, the height

Therefore, the echo signal received by the radar at the scattering point P is

The above equation (4), where

For the equation (5), first, the entire length of the blade is L; then, it is integrated over L, and it can be concluded that the baseband signal of the entire blade is

For a rotor with N blades, each with a different initial rotation angles, then the initial rotation angle of each blade is

From equations (6) and (7), for a rotor with N blades, its receiving baseband signal

In the above equation, the phase function is

In order to calculate the electromagnetic scattering of the rotating rotor blade and easily simulate its model, the UAV rotor blade in Figure 4 can be viewed as a uniform, rigid, and linear rectangular plate, and the rectangular blade is represented by a small rectangular eyelet array, as shown in Figure 6(a). For a fully conductive eyelet plate, the geometric relationship between the plate and the radar is shown in Figure 6(b)

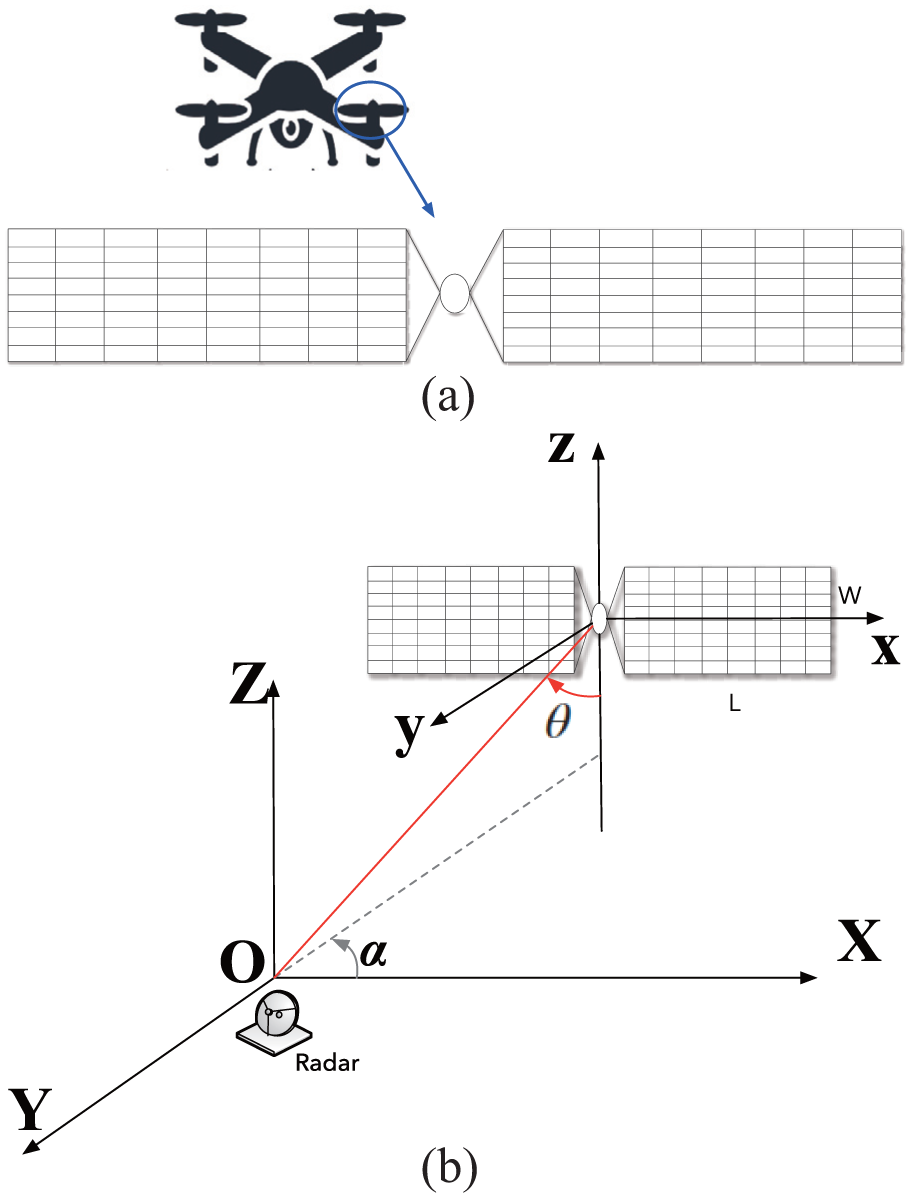
Geometric relationship between radar and rectangular rotor blades: (a) rectangular rotor blade represented by a rectangular eyelet array and (b) geometric relationship between the plate and the radar.
In the above equation,
Suppose the coherent radar emits a cluster of narrow rectangular pulse waves with a repetition period of

In formula (10),
The m-D of rotating one-rotor with double blades
For the one-rotor double-blade UAV, the echo baseband signal is a single-component SFM signal. Derived from the formula in the previous section, the micro-Doppler characteristics are verified by simulation. According to the characteristics of 5G network, we set the radar parameters as follows: the radar works in the K-band, the incident frequency is 28 GHz, the test time is 1 s, the blade length is 0.12 m (the tip is 0.17 m away from the center of rotation, and the distance between the tip of the leaf and the center of rotation is 0.05 m), and the width is 0.05 m. According to the analysis of UAV motor parameters, the actual speed of the one rotor is approximately 33.33 r/s and the rotation center is at

The m-D of rotating one-rotor with double blades.
From Figure 7, the estimated rotation period of the simulated rotor is
The m-D of rotating four-rotor with double blades
As to the four-rotor double-blade UAV, its echo baseband signal is a superposition of multi-component SFM signals, and the micro-Doppler characteristics are verified by simulation. Setting parameters: The parameter settings of radar and blades are the same as those in section B, but the rotation speeds of four rotors are at

The m-D of rotating four-rotor with double blades.
As can be seen from Figure 8, when the baseband signal is a multi-component SFM signal, its micro-Doppler effect will be aliased in the time–frequency domain, and its micro-Doppler characteristics will not be extracted. That is to say, in the joint time–frequency domain, if a simple STFT algorithm is used to process a multi-component SFM signal, then the analysis and extraction of its micro-Doppler characteristics will fail.
Detection algorithm for rotor UAV
The m-D of rotating blades after conjugate processing
By analyzing radar echo signals of the rotor, it is found that not only the phase of the signal contains the rotation rate information of the rotor but also its amplitude. 20 By multiplying the signal and its own conjugate signal, the transformed signal is

It can be obtained from formula (11) that the phase term of the original signal will be canceled, and the square of the amplitude information can double the value of the micro-Doppler effect. At this time, when the sampling rate satisfies the Nyquist law, the micro-Doppler effect is doubled using STFT.
For the radar echo signal data of sections “The m-D of rotating one-rotor with double blades” and “The m-D of rotating four-rotor with double blades,” the m-D characteristics of one-rotor and four-rotor double-blade UAVs are doubled after conjugate processing shown in Figures 9 and 10, respectively.
The m-D in section “The m-D of rotating one-rotor with double blades” doubles after conjugate processing.

The m-D in section “The m-D of rotating four-rotor with double blades” doubles after conjugate processing.
Application of Bessel function to decompose multi-component SFM signals to extract m-D of multi-rotor UAV
It can be known from the analysis in the previous section that the improved STFT is applied to the radar echo of the rotor, which will double the micro-Doppler characteristics, and the one-rotor UAV can be better identified. Due to the randomness of the initial phase of the multi-rotor UAV, its micro-Doppler effect appears to be aliased. Therefore, it will be more difficult to identify it only based on the micro-Doppler characteristics of the UAV rotor. We know that the radar echo signals of multi-rotor UAVs are multi-component SFM signals, so the engineering problem of identifying multi-rotor UAVs can be transformed into a mathematical problem of decomposing multi-component SFM signals. Using the Fourier–Bessel transform (FBT) to project the multi-component SFM signal onto the Bessel function, the signal is better decomposed on the Bessel function domain. Therefore, based on the above considerations, for a multi-rotor UAV, this section will apply the Bessel function base method to accurately extract its micro-Doppler features.
First, the k-order resolution Bessel function base and the multi-component SFM signal integral projection are deduced, and then, each component is decomposed from the projection. Finally, according to the decomposed function base has one-to-one corresponding relations with the micro-motion frequency in the echo result, the frequency of each rotor can be roughly estimated. By introducing k-order Bessel function for SFM signal processing, a micro-motion multi-object feature extraction method based on multi-component SFM signal decomposition is proposed. Suppose there is a continuous SFM signal

In equation (12),

Developed by the Taylor formula, to get rid of the modulation index

Since the signal frequency component corresponding to the Bessel function cannot be subdivided, the parameter k is added to enhance the signal frequency resolution.
21
In the case of satisfying the Nyquist theorem, the definite integral projection of the k-resolution Bessel function

According to the definite integral property 22

In formula (16),

where

Therefore, the longer the radar exposure is, the larger
Based on the above equations, this article uses the multi-component SFM discrete signal with time

Signal projection with Bessel function base, from equations (14) and (15)

where
The parameters in equation (21) are the same as equation (16). Similarly,

In the above equation,
Bessel function simulation
For the example of the four-rotor double-blade UAV in section “The m-D of rotating four-rotor with double blades,” a simulation experiment was carried out to analyze the multi-rotor radar echo signals. In order to verify the accuracy and robustness of the Bessel function extracting the characteristics of multi-component SFM signals, different k-order resolutions
Decomposition projection of multi-component SFM signal with different k-order resolutions and SNRs: (a) k = 5, SNR = 0 dB; (b) k = 5, SNR = 4 dB; (c) k = 5, SNR = 8 dB; (d) k = 10, SNR = 0 dB; (e) k = 10, SNR = 4 dB; (f) k = 10, SNR = 8 dB; (g) k = 15, SNR = 0 dB; (h) k = 15, SNR = 4 dB; (i) k = 15, SNR = 8 dB; (j) k = 20, SNR = 0 dB; (k) k = 20, SNR = 4 dB; and (l) k = 20, SNR = 8 dB.
It can be seen from Figure 11 that four harmonic peaks appear after four main projection peaks, and the peaks are large. The reason for the above situation is that the odd multiple of the phase is also projected; its amplitude is larger (larger than the former) because different rotors lead to different RCSs of eyelet. If
Whatever the SNR value is, peaks are acquired at the same four places under different k-order resolutions. The number of rotors and the accuracy of rotation rate are not greatly affected. And, the estimated rotational speed of each rotor
Four-rotor micro-motion speed extraction results.

The proposed algorithm has good robustness after adding Gaussian white noise with SNR ≥ 0 dB, and can estimate the number and frequency of multi-rotor better. Simulation experiments verify the effectiveness of the algorithm. From the above, although the algorithm has an effect on the harmonic frequency after radar signal processing, it approximately has no effect on the feature reading of UAV classification, and the absolute error is also within the frequency resolution. Therefore, the above results verify the accuracy and correctness of the Bessel function base for extracting multi-component SFM signal features from the simulation point of view.
Support vector machine–based radar target classification
The effectiveness and accuracy of extracting UAV features using improved STFT and joint algorithm based on k-order Bessel function are verified by simulations from sections “Detection algorithm for rotor UAV” and “Bessel function simulation,” which provide accurate and effective micro-Doppler feature data sets for classification model training in this section. This article will use support vector machine (SVM) to extract the micro-Doppler features, establish a model, then train and test, and finally, give the corresponding recognition rate.
SVM is a common two-class model. The core idea is to find a separate hyperplane which can correctly divide the training data set and maximize the geometric interval between it and the data set. The equation corresponding to the separation hyperplane is

For a given hyperplane

For hyperplane

The basic type of SVM is as follows

The original input features are transformed by the kernel function
Data collection and implementation
The micro-Doppler feature data sets of one-rotor and multi-rotor UAVs are extracted from the simulation point using the improved STFT and the joint algorithm based on the k-order Bessel function. The test classification targets are one-rotor UAV and quad-rotor UAV. The specific micro-Doppler characteristics are the rotational speed of the rotor, the number of rotors, the length of each rotor, and the speed of the rotor tip. The data set is randomly divided into training data and testing data according to the ratio of six to four, so that the sample learning is performed; finally, the pattern recognition gets the classified output. Figure 12 shows the implementation flowchart of UAV target recognition.

Implementation flowchart of UAV target recognition.
It is necessary to construct a suitable multi-class classifier when dealing with multiple types of targets. Commonly used multi-class classifiers are both direct and indirect methods.
23
In this article, the indirect method will be adopted. The simple design is to design an SVM among any two samples, so that
Classification results
For the classification of UAV types, we will use the method of machine learning. All available micro-Doppler features are divided into training sets and testing sets with no overlap. The number of correctly classified segments determines the ratio of the probability of correct classification to the total number of segments in the testing sets. A cross-validation technique of
Test performance of different kernel functions.

It can be seen from Table 2 that under different kernel functions, the classification accuracy of UAV is very high, and the classification accuracy is the highest when the linear kernel function is used. The reason is that the four features extracted are strong and can well characterize the characteristics of each UAV. This proves that the data sets based on the micro-Doppler features extracted by the joint algorithm proposed in this article can better identify a rotor UAV and the algorithm is robust.
Conclusion
In Space–Air–Ground IoT, UAV network is a representative of the air-based network and is widely used. 5G network architecture deploys a communication channel for UAV network. The high bandwidth and BF features make it possible to detect UAVs with 5G millimeter waves, and the application of high-band 5G MMW to detect UAVs is better. For the method of detecting and identifying UAV proposed in this article, it can be seen from the simulation results that applying the proposed joint algorithm, namely, the improved STFT and the integral projection of k-order Bessel function and SFM signal, can better extract the micro-Doppler characteristics of one-rotor and multi-rotor UAVs. For these characteristics, the corresponding training and testing data sets are established. Through training data sets, the SVM classification recognition model is obtained. Finally, the corresponding classification recognition rate is given, and the following conclusions are drawn: (1) conjugate processing of radar signal data can double the micro-Doppler effect and enhance the recognition effect of one-rotor UAV. (2) The phase frequency identification accuracy of multi-component SFM signals is enhanced by introducing k-order resolution in Bessel function base, and the algorithm is proved to be robust with different SNRs. (3) The micro-Doppler features of the rotor UAVs are extracted by the above joint algorithm, and the data sets are constructed. Finally, the classification model obtained by training gives a good classification result. This article provides a better method to detect and identify single-channel UAV with 5G MMW, which has important engineering significance.
Footnotes
Handling Editor: Feng Ye
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.