
Abstract
Recently, coprime array has been a popular research field in the application of direction-of-arrival estimation. Compared with uniform linear array, coprime array can be used to expand array aperture with fewer sensors, and it also has a nice direction-of-arrival estimation performance. According to coprime property, the direction of arrival can be obtained by intersecting the candidate estimation sets from several subarrays. However, when the directions of multiple sources meet a particular relation, the unambiguous phase cannot be unwrapped through the coprime array. In this article, a multi-coprime array is proposed to address the problem, utilizing about half number of array elements and reducing hardware complexity compared with uniform linear array. Then, a low-complexity beamforming interferometry algorithm via multi-coprime array is proposed to reduce computational complexity. Numerical results, including simulation and actual data processing, are provided to indicate that the processing on multi-coprime array can successfully resolve phase ambiguity. Specially, when signal-to-noise ratio exceeds about −4 dB and the element number of subarray in multi-coprime array exceeds 15 for the array geometry in this article, the proposed method achieves close estimation performance with fewer sensors compared with uniform linear array.
Introduction
Sound navigation and ranging (Sonar) is a technique which uses sound to navigate,
1
communicate
2
with, or detect
3
objects on or under the surface of the water. Two types of techniques are used: passive sonar
4
is utilized to listen for signals and noise made by objects; active sonar
5
emits an acoustic signal and listens for echoes reflected by an obstacle or object. Bathymetric sonar
6
is a type of active sonar used to obtain depth information. The principle of bathymetry is shown in Figure 1. The range between two blue arrows denotes the cover section of transmission beam, and red arrows denote echoes of scatters in the seafloor. Generally, in real scenarios, two echoes in distinct directions impinge on the array at

The bathymetric concept.
Recently, Pal and Vaidyanathan14,15 proposed a sparse array called coprime array. For this array configuration, not only is the redundancy reduced but also the degrees of freedom (DOFs) are increased. Based on the configuration, Zhou et al. 16 proposed DECOM, a DOA estimation method by combining the multiple signal classification (MUSIC), to resolve phase ambiguity, and then two-phase adaptive spectrum search scheme is used to reduce computational complexity. Weng and Djurić 17 proposed a search-free DOA estimation algorithm, and Chinese remainder theorem is utilized to eliminate phase ambiguity. According to the linear relationship between the actual DOA and its ambiguous estimation, Sun et al. 18 proposed a partial spectral search (PSS) method to recover all candidate DOAs, and then the computational complexity is reduced greatly. Wu et al. 19 proposed a coprime planar array to address the two-dimensional (2D) direction estimation issue. Zhou et al. 20 proposed an adaptive beamforming algorithm via coprime array to reconstruct the interference-plus-noise covariance matrix, achieving a better output performance. The above-stated ambiguity elimination methods can be summarized as matching a pair of DOAs from candidate sets obtained by decomposed sparse uniform linear subarrays, where the coprime property is utilized. However, for multisource cases such as bathymetry, several “singular points” may destroy the matching property, and then the wrong DOAs may be obtained through conventional coprime array. For this study, one of the motivations is to remove these “singular points” for unambiguous DOA estimations.
In this article, a multi-coprime array (MCA) is proposed to address the above-stated problem and then the existence and uniqueness for accurate DOA estimation is proved. Considering the primary motivation of the article, MCA is used to reduce hardware complexity and eliminate phase ambiguity with the coprime property for bathymetric sonar. According to Zhou et al., 16 the ambiguity elimination algorithm can be summarized as two steps: first, estimate the DOAs through sparse uniform linear subarrays, and the candidate DOA sets are established; second, the candidate DOA sets from three subarrays are combined and overlaps are searched.
Recently, multibeam echosounder sonar (MBES) and PDBS have been the main sonars used for bathymetric survey. The beamforming method is used for MBES to obtain robust DOA estimations, but a dense angle grid leads to an extremely heavy computational complexity. The phase difference between different receiving elements is utilized for PDBS to acquire high-resolution DOA estimation, but a
For this study, a beamforming interferometry method via MCA is proposed. First, beamforming is utilized to preprocess the received signals, and rough DOAs can be obtained. It should be noted that the spatial angle grid is sparse in the first step since only rough DOAs are needed, and computational complexity is fairly low. Second, the phase difference between the actual DOA and the rough grid is utilized for off-grid estimation. Unlike the DECOM method by Zhou et al.,
16
the secondary spectrum search scheme is not required for the proposed method, and thus the computational complexity is greatly reduced. Besides, according to Proposition 5, within the rough grid, there is no
The motivations of the article can be categorized as two aspects: first, to reduce hardware complexity, coprime array is utilized; however, for multisource case, and especially at “singular points,” it is important to investigate a method to completely resolve the points. Second, since MUSIC-inherited methods usually increase the estimation accuracy using very small, fixed grid searching step at the expense of much more computational complexity, it is meaningful to develop a method to reduce computational complexity.
The main contributions of this article mainly contain the following three aspects:
First, this article proposes a new coprime array configuration to completely resolve phase ambiguity especially at “singular points,” and in the multisource case, the existence and uniqueness proofs for DOA estimation are provided. In addition, the proposed array geometry use about half number of array elements compared to ULA, reducing hardware complexity.
Second, a beamforming interferometry method is proposed for coherent DOA estimation via MCA, which inherits the capacities of multisource DOA estimation and off-grid estimation, and both magnitude and phase information are incorporated to estimate the DOA, reducing computational complexity.
Third, numerical experiments including simulation and sonar data processing verify the validity and superiority of the proposed method in terms of complexity and DOA estimation accuracy. Specially, for the array geometry in this article, when signal-to-noise ratio (SNR) exceeds about −4 dB and the element number of subarray in MCA exceeds 15, the proposed method achieves close performance compared with ULA.
The remainder of this article is organized as follows. In section “Complete ambiguity elimination using MCA,” we introduce the configuration of MCA and the principle of phase ambiguity elimination. In section “Low-complexity DOA estimation algorithm,” a novel beamforming interferometry method is proposed. Section “Simulation and data process” provides simulation and data processing to verify the effectiveness and superiority of the method. Section “Conclusion” provides the conclusion. Appendix provides some proofs for the propositions.
Problem formulation
Signal model
MCA is a special non-ULA configuration, which consists of three sparse uniform linear subarrays. The first subarray has M elements with an inter-element spacing of Pd, and the locations of sensors are given by the set
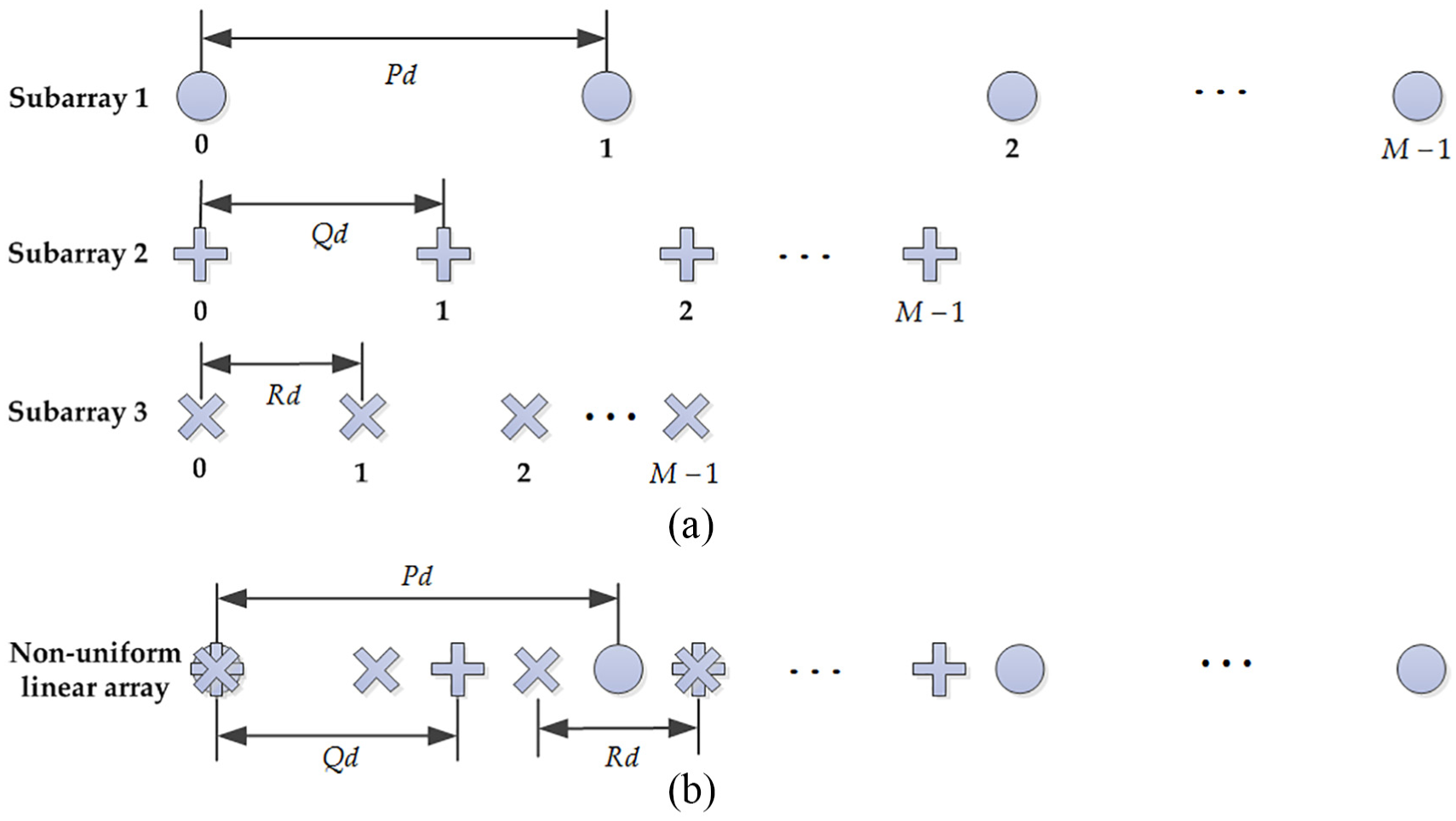
Multi-coprime array configuration: (a) decomposed—a triplet of sparse uniform linear subarrays; (b) aligned—a non-uniform linear array.
Considering bathymetric model in Figure 1, suppose that two coherent narrowband far-field echoes impinge on the array from distinct directions at a single snapshot. The signal vectors received by three subarrays in Figure 1 are given by



where
DOA estimation for sparse ULA
The beamforming method is a fast, robust algorithm to retrieve amplitude and direction information for each snapshot, and it is widely used for bathymetric sonar. According to the beamforming method by Pantzartzis et al., 9 beamforming is implemented by complex multiplication and addition from spanned spatial grids, as follows



and the steering matrices are given by



where



where
Incomplete ambiguity elimination using coprime array
In this section, the phase ambiguity problem for a sparse ULA is explained, and then a general principle of ambiguity elimination is illustrated. In addition, the reason why multisource cases may be invalid is demonstrated.
A coprime array can be formed by selecting any two subarrays from MCA, for example, subarray 1 and subarray 2. In Figure 1, assuming that there are two scatterers located at




where
By combining equations (5a)–(5d), the candidate DOA sets of the subarrays are given by


where
However, because the method cannot guarantee the accurate solution, it is incomplete to resolve phase ambiguity in “singular points” (see Appendix 1).
Complete ambiguity elimination using MCA
In Figure 1, assuming that there are two narrowband sources located at


where

For MCA, we have the following proposition to completely resolve phase ambiguity.
Proposition 4
Assuming that there exist two echoes reflected by scatterers located at distinct directions, then there exists accurate DOAs obtained by the closest matching operation from candidate sets
Proof
See Appendix 3.
According to Proposition 4, by searching for the most approximate angles from the candidate sets, we can obtain the DOA estimations of echoes. To clearly explain the principle of the method, an example can be illustrated as follows.
There exist two echoes from distinct directions
For subarray 1 consisting of M sensors with inter-element spacing
For subarray 2 consisting of M sensors with inter-element spacing
For subarray 3 consisting of M sensors with inter-element spacing
For coprime array consisting of subarray 1 and subarray 2, except for actual DOAs in the black boxes, two “singular points” can be obtained by searching for the pair of DOAs from different subarrays in green box. As shown, these points are obtained by matching candidate sets corresponding to different sources. It should be emphatically pointed out that the locations of the scatterers are arbitrary in space. For other coprime array consisting of any two subarrays, there always exist the situations as (13a) or (13b), which may lead to wrong matching. And thus a coprime array consisting of two subarrays, for example, subarray 1 and subarray 2, cannot completely resolve phase ambiguity.
As we seen in Figure 3, two actual DOAs

Example of ambiguity elimination using MCA.
Until now, actual DOA estimations could be picked up from candidate sets. However, when there exist more sources, such as three (
Low-complexity DOA estimation algorithm
Beamforming is a robust and low-complexity algorithm widely used for DOA estimation in MBES. Similar to other DOA estimation methods based on prespecified discrete spatial grid, for example, MUSIC, its estimation performance relies on grid density to a certain degree. A dense and fixed grid is always utilized to improve the accuracy of estimation to a certain extent, which leads to a heavy computational complexity. For phase difference bathymetric sonars, the interferometry method is widely used for DOA estimation and there exists a phase ambiguity problem in the processing of unwrapping phase difference of two subarrays. In addition, the Vernier method7,11,20 is always used to efficiently resolve phase ambiguity. However, the Vernier method is similar to coprime array, and Chinese reminder theory, 17 which uses coprime property to match the most approximate estimations from the candidate DOA sets. However, according to Proposition 3, the method may be invalid for multisource cases. In this article, a beamforming interferometry estimation method via MCA is utilized, which addresses the above-stated problem. First, according to previous part, we can resolve phase ambiguity with beamforming method via MCA. In Figure 4, blue lines denote spatial grids and blue solid lines represent on-grid DOAs estimated with beamforming method. Second, an interferometry method is utilized for off-grid DOA estimation based on rough estimation. In Figure 4, red lines denote the actual directions that can be estimated by the proposed method. A detailed description of the second step is provided below.

Beamforming interferometry method.
In Figure 4, assuming that there exist two echoes with distinct directions
According to the spanned grid, the uncertain degree
According to equations (4a)–(4c), the phases of beamforming output can be expressed as follows



According to equations (9a)–(9c), the phases of beamforming contain the information of actual DOAs, which were utilized to estimate the DOAs in phase difference bathymetric sonars. It is important that phase
Proposition 5
A sparse ULA has M sensors with an inter-element spacing Pd, where d is the unit inter-element spacing which is set as half a wavelength
Proof
See Appendix 4.
According to Proposition 5, when there exist



At this point, the beamforming peak position and phase of beamforming output are combined, and all candidate DOA estimations for each subarray can be obtained. Then, the actual DOA can be picked up from the candidate sets through coprime property. The proposed beamforming interferometry method is summarized in Table 1.
Process scheme of the proposed algorithm.

Simulation and data process
Simulation
Three experiments were conducted to evaluate the performance of the proposed method. In them, several typical scenarios that the bathymetric sonar works in the “singular point” are considered.
In our simulation, we used MCA consisting of three subarrays, as shown in Figure 2: the first one with an inter-element spacing of
To obtain the off-grid estimation for fair comparison, several Root-MUSIC 22 based algorithms were used for comparison with the proposed method. Since the echoes were coherent, forward spatial smoothing–based Root-MUSIC (FSS-RM), 23 forward and backward spatial smoothing–based Root-MUSIC (FBSS-RM), 24 and Toeplitz reconstruction–based Root-MUSIC (TR-RM)25,26 were utilized for comparison. In addition, based on coprime array and MCA, all the above methods were used for comparison to illustrate validity of resolving phase ambiguity.
To illustrate results of the example in Figure 3, the first experiment can be described as follows: in the simulation, the first incident angle was set as

DOA estimation results for several methods.
To further evaluate the estimation performance, we computed the root-mean-square error (RMSE) of the methods using 2000 independent trials. The RMSE of the DOA estimations can be expressed as follows

where
In the second experiment, we considered an approximate flat terrain scenario, where the DOAs of two echoes were approximately symmetric, that is,
In the third experiment, we considered a slope terrain scenario, where the DOAs of two echoes were asymmetrical. The first incident angle was set as
Figures 6 and 8 present the RMSE performance versus SNR in the flat terrain scenario and the slope terrain scenario, respectively. Figures 7 and 9 represent the RMSE performance versus the number of subarray elements in the flat terrain scenario and the slope terrain scenario, respectively.

RMSE performance versus SNR: (a) first scatterer is located at
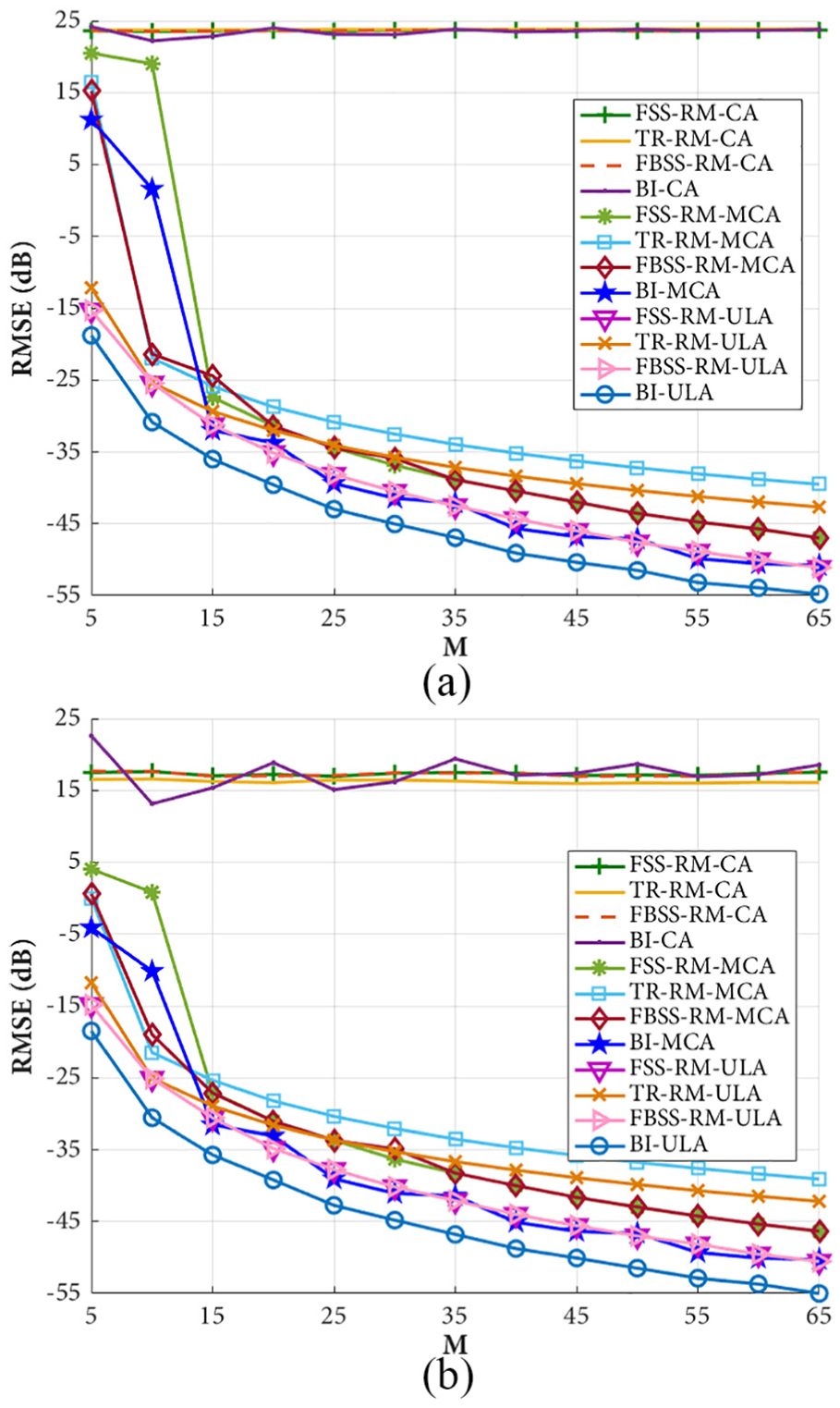
RMSE performance versus the number of subarray elements: (a) first scatterer is located at

RMSE performance versus SNR: (a) first scatterer is located at

RMSE performance versus the number of subarray elements: (a) first scatterer is located at
For the second experiment, according to the simulation results depicted in Figure 6, the coprime array–based methods suffered from performance degradation since the “singular points” always exist, which is in agreement with the results of experiment 1 in Figure 5. In contrast, the performance of the methods via MCA kept increasing with the increase in the SNR, as expected. The estimation performance of the proposed method via MCA with less array elements and the Root-MUSIC-based methods via ULA were approximate when the SNR was larger than −4 dB as shown in Figure 6. In comparison with three Root-MUSIC-based methods with same array structure, the accuracy of the proposed method was better. As shown in Figure 7, as there is an increase in the subarray element number, the performance of different methods via MCA became enhanced. While the number of subarray elements was more than 15, the performance of the proposed method was better than the Root-MUSIC-based methods. The reasons for the superiority can be categorized into three aspects. First, benefiting from the coprime property of the MCA, both magnitude and phase information are used to improve the performance. Second, the Root-MUSIC-based methods rely on the estimation of the covariance matrix. In general, the standard sample covariance matrix cannot exactly represent the true covariance of an ensemble mean, but it comes close enough for reasonable snapshots. Therefore, the performance would be degraded in the single snapshot scene. Third, when the number of snapshots is small, or alternatively, when the SNR is small, the performance of the high-resolution algorithms, such as Root-MUSIC, declines.27,28
For the third experiment, we observed similar performances as in experiment 2. The performance of the small angle direction was better than that of the large angle in Figures 8 and 9. In contrast to the second experiment, as shown in Figures 6 and 7, the performances of the two directions in the second experiment were approximate. The reason for this is that as there is an increase in the incident angle, as expected, the estimation performance is degraded. 29 The above comparisons demonstrate that the proposed method can provide a lower RMSE than the other methods for same array when the number of subarray elements is enough.
Complexity analysis
First, we compared the complexity of the Root-MUSIC method and the proposed method. According to Marple,
30
the approximate relative computational complexity of an eigenanalysis-based method, such as MUSIC and Root-MUSIC, is
Second, to demonstrate the efficiency of the proposed method via MCA, we compared the computational complexity with the beamforming algorithm via ULA. For a fair comparison, according to Figure 2, a ULA with half a wavelength spacing was considered with the proposed method, whose element number was
Sonar data processing
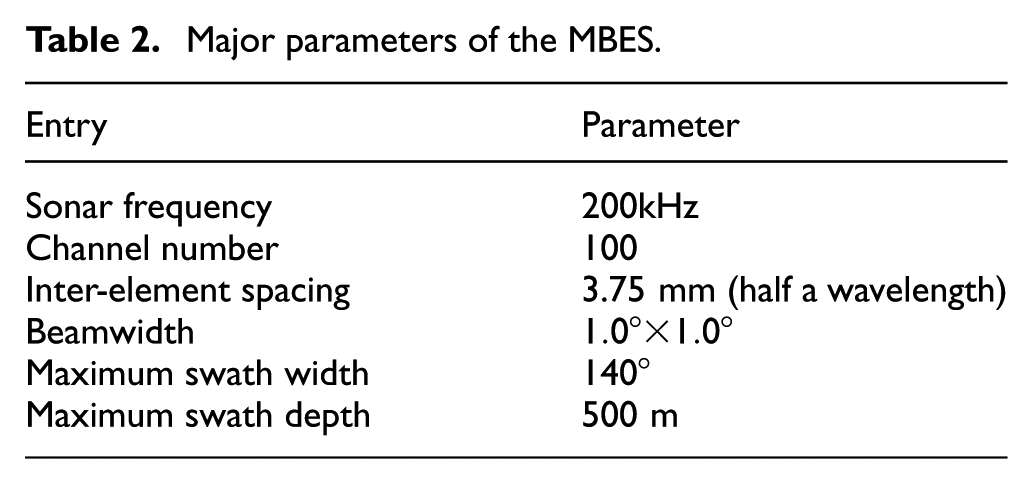
To verify the performance of the proposed method, raw data recorded in a lake by an MBES were utilized. The major parameters of the sonar are shown in Table 2. The sonar system is shown in Figure 10(a), and it was deployed in the side of ship (see Figure 10(b)).
Major parameters of the MBES.
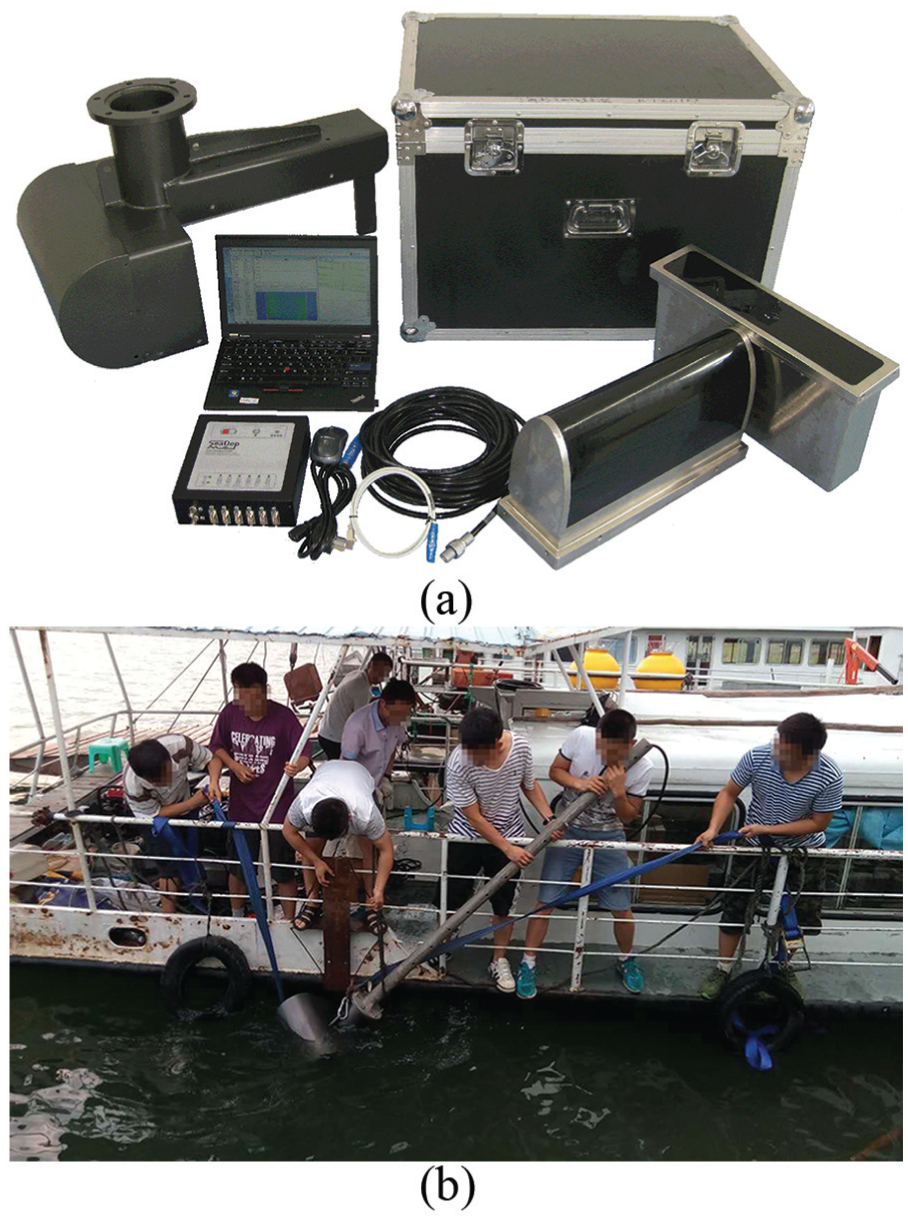
Multibeam echosounder sonar system: (a) system compositions of the sonar; (b) deployment of the sonar.
For a fair comparison, a ULA with half a wavelength spacing was also considered with the proposed method, whose element number was
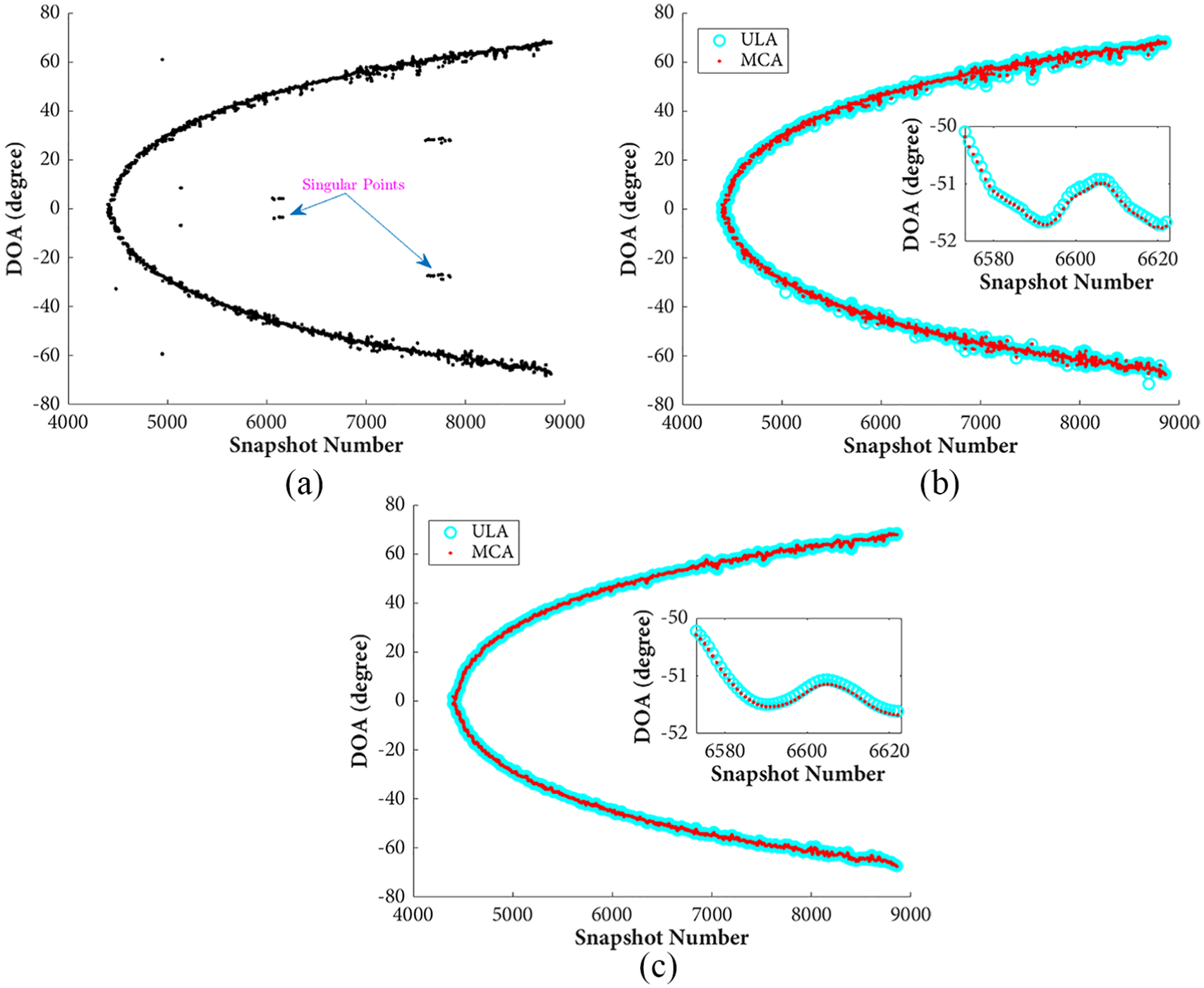
Comparison with different methods: (a) raw results via coprime array (CA), (b) raw results via ULA and MCA, and (c) filtered results via ULA and MCA.
As shown in Figure 11(a), numerous “singular points” can be observed. The unambiguous DOAs can be obtained, as shown in Figure 11(b). In addition, a smooth filter 13 was utilized to improve the performance to a certain extent in Figure 11(c). By constructing with a conventional ULA structure, the performance of the proposed method based on MCA was close. In all, an analysis of the performance and results validate that the proposed method is effective and feasible.
Conclusion
In this article, MCA was proposed for completely resolving phase ambiguity. In addition, a low-complexity beamforming interferometry method was proposed via MCA. The proposed method not only inherits multisource estimation capacity from the beamforming method but also significantly reduces the complexity for off-grid DOA estimation with the interferometry method. Moreover, extensive experimental results demonstrated that the proposed method is feasible for multisource estimation and achieves a better performance than the other Root-MUSIC-based methods in terms of computational complexity and estimation performance. Finally, sonar data processing demonstrated that the performance of the proposed method with fewer array elements was approximate to the conventional method.
Footnotes
Appendix 1
Appendix 2
Appendix 3
Appendix 4
Acknowledgements
The authors specially thank the associate editor and the anonymous reviewers for providing constructive feedback to help improve the quality and presentation of this manuscript.
Handling Editor: Jaime Lloret
Author contribution
The idea was proposed by J.S.; J.Z. and W.Z. simulated the algorithm; T.Z. and D.P. analyzed the data; and J.S. designed the experiments and polished the English.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: Research in this paper was supported by the National Natural Science Foundation of China (grant nos U1709203 and 41376103), the Fundamental Research Funds for the Central Universities (no. HEUCFD1502) and the Fund of Acoustics Science and Technology Laboratory.