
Abstract
In a localization system, time difference of arrival technique is widely used to estimate the location of a mobile station. To improve the performance of mobile station location estimation, a novel algorithm-based artificial neural network ensemble and time difference of arrival information is proposed in non-line-of-sight environments. Back propagation neural network is a classic artificial neural network and may be effectively used for mathematical modeling and prediction, and an artificial neural network ensemble has better generalization ability and stability than a single network. First, the parameters, such as the weights and biases of the single neural network are optimized by the ant lion optimization method which is novel and effective. Then four types of different information from the time difference of arrival measurements are respectively used to train the individual neural network. Finally, the weighted average method is improved to combine the outputs of the different individual neural network, where weights are determined by the training errors. The estimation accuracy of the locating system is evaluated through experimental measurements. The simulation results show that the proposed algorithm is efficient in improving the generalization ability and localization precision of the neural network ensemble model.
Introduction
With the rapid development of sensor technology, the demand for positioning is becoming more and more popular. The source localization technique has become the research hotspot in recent years, which can be used in localization of sound, radio frequency, and optical sensors.1,2 Localization algorithms for sensor networks can be generally classified into two categories: 3 range-free algorithms and range-based algorithms. But the localization accuracy of range-free algorithms are usually lower than that of range-based ones. 4 There are three main effective approaches of range-based localization, including angle of arrival (AOA), received signal strength (RSS), and time difference of arrival (TDOA).5,6 However, AOA method, using directive antennas, has an inaccuracy of some degrees about 5°, and RSS method can be highly influenced by noise, obstacles, and the type of antenna used. 6 TDOA method uses the time difference of reception of signals received by the various sensors and the network reference sensor, and this method has a significant advantage in the ease of implementation, being widely used in practice. Jiang et al. 7 deals with source localization with TDOA measurements in two-dimensional (2D) scenarios. The Taylor series method 8 and Chan’s method 9 are the basic TDOA localization methods. The Taylor series method linearizes the set of equations by Taylor series expansion, then uses an iterative method to solve the system of linear equations. 8 Chan’s method is a non-iterative solution to the hyperbolic position-estimation problem, which is capable of achieving optimum performance for arbitrarily placed sensors; when TDOA estimation errors are small, this method is an approximation to the maximum likelihood (ML) estimator. 9 Xiong et al. 10 presents a tag localization algorithm based on the TDOA of mobile tag signal for asynchronous wireless sensor network with N anchors and a large number of mobile tags. An expectation maximization (EM)-based method for TDOA localization is developed by Qiao et al., 11 which is much simpler to implement, since no matrix manipulation is required. However, the accuracy of mobile station (MS) location estimation highly depends on the propagation conditions of the channels. The non-line-of-sight (NLOS) problem is always the dominant factor that greatly affects the precision of MS location estimation. The accuracy of MS location can be seriously degraded in the absence of a line-of-sight (LOS) signal component based on the conventional TDOA methods. 12
To enable an improved accuracy of source localization, new methods based on machine-learning algorithms were presented for the localization in arbitrary complex systems. Neural networks (NNs) are known to be well suited for the purpose of functional approximation of such multidimensional non-linear problems. As it has been shown previously, the use of such NN–based approaches12,13 allows to compensate the effect of obstacles in the propagation path. When the MS is heard by only three base stations (BSs), Chen 12 utilizes the intersections of three time of arrival (TOA) circles (and the AOA line), based on various NNs, to estimate the MS location in NLOS environments. In order to solve the problem of poor performance of Chan’s location algorithm based on TDOA parameters in NLOS environment, an improved location algorithm–based radial basis function (RBF) NN is proposed by Wu et al., 13 in which the NN is used as a filter. Two improved RBF NN-based indoor positioning approach utilizing received signal strength parameter are presented by Guo et al. 14 The objective of Kalafat and Sause et al. 15 is to present an alternative localization method based on the use of NNs, using TDOA data as the training data, where the test sources are applied on the test object to yield input data for a NN. On the basis of the obtained TDOAs and accurate sound source positions, the performance of NN-based method was examined using a large number of samples in terms of different acoustic sensors setups, network configurations and training parameters. 16 The research by Alonso-González et al. 17 focus on to propose a fingerprinting indoor positioning estimation system based on NNs to predict the device position in a 3D environment, and the localization system is built using a data set of received signal strength coming from a grid of different points. These research work shows that NNs are effective classification and predictive methods.
Back propagation neural network (BPNN) is one of the most widely used and most effective NN models in the artificial NNs, which has powerful processing ability of nonlinear decision. Therefore, it can solve the problem of the accumulation error caused by the indoor positioning very well when the data contains noise and nonlinearity. 18 However, the BPNN also has some disadvantages such as slow convergence rate, the network easily becoming trapped at a local minimum, and lack of theory to determine the initial weights and threshold of network. In general, optimization methods can make up the deficiency of BPNN. 19 In addition, the NN ensemble is a technique which can significantly improve the generalization ability of the NNs through training a number of NNs and then combining them. In order to improve generalization performance, ensemble learning usually comprises two main phases: one is the generation of accurate individual learners with somewhat diversity and the other is the combination (fusion) of the individual learners. 18 The goal of the combination is not only to combine the selected individual learners’ results as a final result of the ensemble but also to optimally realize the complementariness of the participants from their diversity.18,19 Generally, the most common methods are simple averaging or weighted averaging 19 for regression problems and almost all the individuals are using the same input as the training data. 20
This article focuses on an indoor localization system based on an NN ensemble model. Ant lion optimization (ALO) method 21 is used to make up the deficiency of BPNN, the weights and biases are optimized. Four individual NNs are trained with different input in order to generate independent learner. Then a new weight design method based on training error is established for selecting individuals to construct an ensemble.
The article is organized as follows: section “Localization model using TDOA” summarizes the related work about conventional localization method using TDOA. Section “NN optimized by ALO method” explains the a novel NN optimized by ant-lion method. Next, in section “NN ensemble model for TDOA localization,” the TDOA location system based on NNs ensemble model is described. In section “Simulation results and analysis,” the results are discussed, and the performance are analyzed. Finally, in section “Conclusion” the conclusions are presented.
Localization model using TDOA
Assume that there is a MS in a sensor networks with unknown position coordinate (x, y). The distance from MS to the ith BS is

where Xi and Yi are the known coordinates of BS i , and M is the number of BSs.
The distance difference between this MS to BS i and BS l is
where Rl is the distance between BS
l
and this MS,
This section analyzes the TDOA techniques with the basic positioning methods, such as Taylor-iteration method and Chan’s method in the sensor network.
Taylor-iteration method
The Taylor-iteration method uses an iterative method to sole the set of hyperbolic equations and estimate of the position of an MS.
8
The procedure is started with an initial guessed coordinate values (x0, y0) and determines the local linear least-square solution as the deviations at each of iteration. In every iteration, x0 and y0 are set to be

where
Chan’s method
Chan’s method is another non-iterative solution of achieving optimum performance for arbitrarily placed sensors.
9
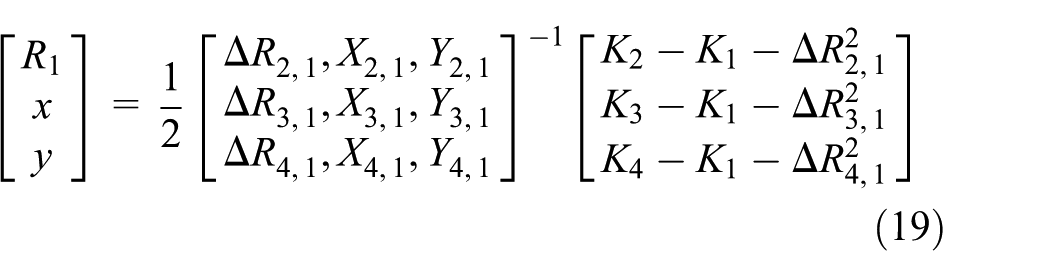
The solution is also in closed form. Let

where
The final position estimate is then obtained from

Or

NN optimized by ALO method
The artificial NN has been introduced into source localization.12–16,22,23 The basic idea behind NNs is that through the connection of simple individual elements, a network is created that can capture or process complex information. The advantage of these networks is their capability to recognize patterns and symbolic contexts from examples without using explicit analytical functions to describe this context. 12 This is usually achieved through a modeling phase. BPNN is a classic artificial NN and may be used for mathematical modeling and prediction. However, the initial parameters, such as weights and neuron biases are randomly produced, it is not easy to obtain the best prediction results by only using BP network without optimization.
BPNN
BP algorithm, with a gradient-descending strategy, has been formulated as the multilayered perceptions. In the learning process of BP network, the training pattern’s input propagates forward from the output nodes to the inner nodes. BP network typically has a three-layer structure: input layer, hidden layer, and output layer. 24 It is well known that a single hidden layer is sufficient to approximate a continuous function 25 with arbitrary precision. To compute the net input to neuron, each input connected to the neuron is multiplied by its corresponding weight to form a weighted sum, which is added to the bias associated with neuron j. Given a unit j in a hidden or output layer, the net input netj to neuron j is given by

where
The initial weight matrix
ALO method
ALO method is first proposed by Mirjalili. 21 ALO algorithm mimics interaction between antlions and ants in the trap.
Creation of normalization of a random walk
Since ants move stochastically in nature when searching for food, a random walk is chosen for modeling ants’ movements as follows

where cumsum calculates the cumulative sum, n is the maximum number of iteration, t shows the step of random walk, and

where rand is a random number generated with uniform distribution in the interval of [0,1].
Random walks are all based on equation (9). Ants update their positions with random walk at every step of optimization. Since every search space has a boundary (range of variable), however, equation (8) cannot be directly used for updating position of ants. In order to keep the random walks inside the search space, they are normalized using the following equation (min–max normalization)

where
Trapping in antlion’s pits
As discussed above, random walks of ants are affected by antlions’ traps. The following equations are used in order to mathematically model this assumption


where
With the mechanisms proposed so far, antlions are able to build traps proportional to their fitness, and ants are required to move randomly.
Update of antlion position
Elitism is an important characteristic of evolutionary algorithms that allows them to maintain the best solution(s) obtained at any stage of optimization process. The best antlion obtained so far in each iteration is saved and considered as an elite. Since the elite is the fittest antlion, it should be able to affect the movements of all the ants during iterations. Therefore, it is assumed that every ant randomly walks around a selected antlion by the roulette wheel and the elite simultaneously as follows

where
Selection of the final optimization results
The final stage of hunt is when an ant reaches the bottom of the pit and is caught in the antlion’s jaw. After this stage, the antlion pulls the ant inside the sand and consumes its body. For mimicking this process, it is assumed that catching prey occur when ants becomes fitter (goes inside sand) than its corresponding antlion. An antlion is then required to update its position to the latest position of the hunted ant to enhance its chance of catching new prey. The following equation is used in this regard

where and f is the objective function,
Improvement of BPNN-based ALO method
In this study, the ALO algorithm is involved to support the NN training, which can be seen in Figure 1.

BPNN optimization process using ALO.
During the BP–ALO combination, while the NN handles the non-linearity, ALO is used to optimize the NN parameters for an accurate fit. ALO optimizes a problem by utilizing individual ant lion which moves around in the search-space according to a simple mathematical model. An ant lion position represents one of the solutions for determining weights and biases for a BPNN. The length of the ant lion position equals the dimensionality of the weights and biases.
The root-mean-square error (RMSE) is used as the objective function. Thus, the ALO has been engaged to minimize the RMSE during the training phase of the NN. It is calculated as the difference between the values anticipated by the prediction of NN and the values actually discovered from the surroundings of the localization system. The RMSE of the prediction with respect to the computed variable vck is determined as the square root of the mean-squared error and is given by

where
The objective of the ALO is to find a weight and bias vector that can meet the requirement of RMSE, which is written by

where
In Figure 1, the convergence condition is to judge whether to meet the termination conditions of ALO algorithm (
NN ensemble model for TDOA localization
An artificial NN ensemble is a composite model of multiple NNs, with better generalization ability and stability than a single network. NN ensembles are effective only when the individual nets make independent errors. Here, we propose an NN ensemble localizer that deploys a variety of individual networks to achieve more accurate localization accuracy. The ensemble model is shown in Figure 2.
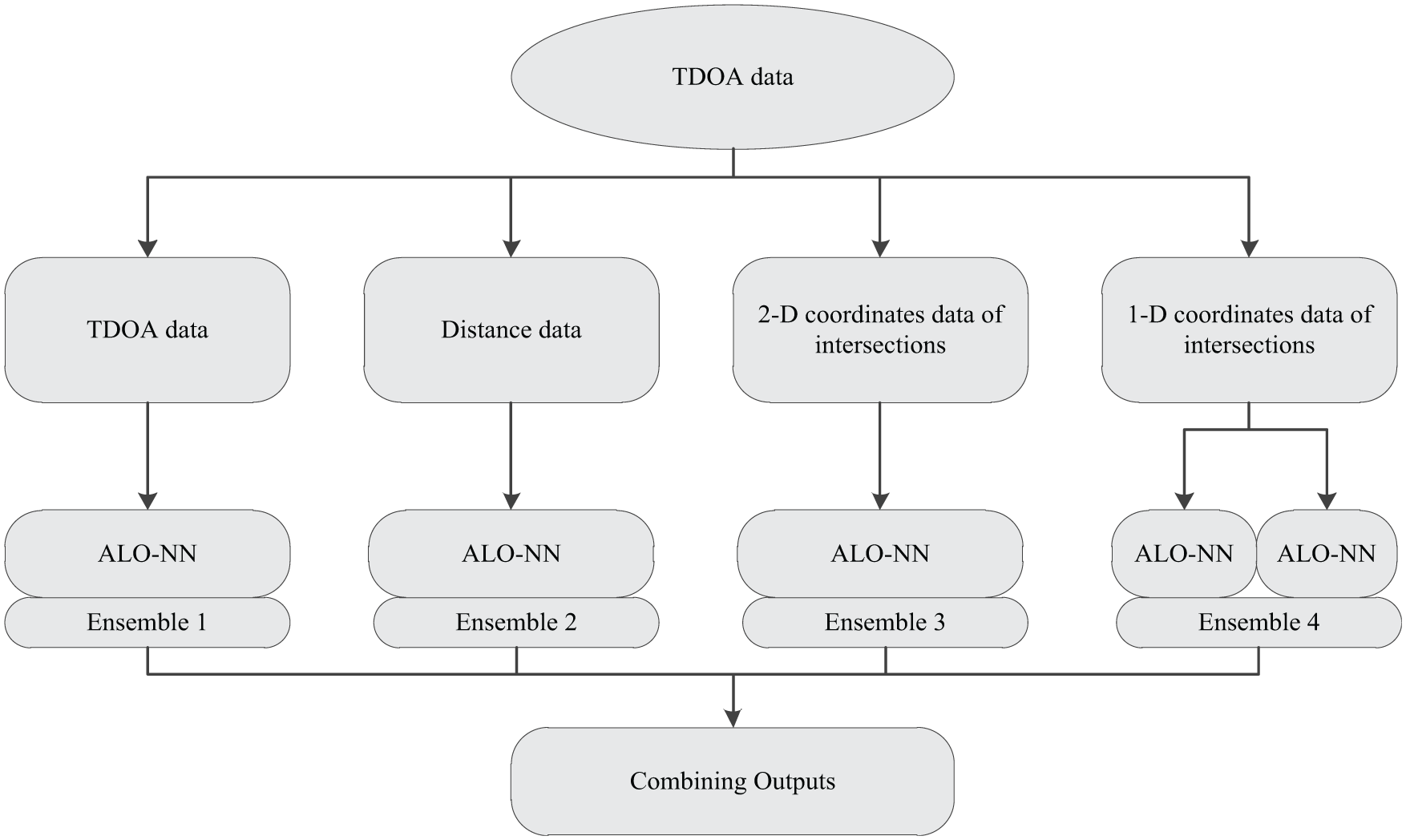
Ensemble model–based TDOA information.
In our NN ensemble, each network individual with different input is initially trained using the different training sample. When developing the ALO-BP ensemble model, the training data sets are generated by re-sampling for training of the individual NNs. To enhance differences between the individual NNs, the recurrent connection weights and biases of the individual network are optimized with different training data set. A variety of inputs have been developed to train network ensembles to achieve better generalization capability, which include TDOA data of every BS, distance data from MS to all the BSs, 2D coordinates and one-dimensional (1D) coordinate of the circle intersections between the BSs.
During the modeling phase for every NN, the weights and biases are optimized according to the input and output parameters of the data set, based on the ALO method. The original TDOA information data are divided into four groups for the four NNs.
1. NN 1–based TDOA data.
TDOA information data are given as input to the NN models, and coordinates x and y of the nodes are taken as the outputs. The input and output are represented as follows


The TDOA data and the true MS location are used to train the network until it establishes the desired relationship.
2. NN 2–based distance data.
First, the distance of each BS from the MS is calculated using TDOA data.
According to the TDOAs, the distances can be computed through equations (16)–(18)


where
For example, we can get three equations when N = 4 and j = 1. Then
Using the same methods,
These distances are given as input values and coordinates of x and y values of MS are given as a target values to the NN models for training. The input and output are represented as follows


3. NN 3–based 2D coordinates data of intersections.
According to the viewpoint of geometric approach, distance measured from each BS can form a circle centered at the BS. Then the MS position is estimated by the intersection of circles from multiple TOA measurements. Each of the following three equations describes a circle for TOA



If there is no NLOS error and measurement error, the three circles will intersect at the same point, which is the true MS location. However, NLOS propagation may occur in most environments and cause M circles to intersect at some points. Because NLOS error is always positive due to the excess path length, the TOA measurements always appear as a positive bias, greater than the true values.
12
In our algorithm,


4. NN 4–based 1D coordinates data of intersections.
During training, NN repeats and adjusts the weights of the connections in the network, and it is effective to reduce the input to minimize the difference between the actual MS location and the desired MS location. This article presents two NNs, which are used to predict MS coordinate of X and Y direction, respectively. Therefore, the input and output are represented as follows




The final prediction result
5. Ensemble output.
Then the outputs of the individual networks are weighted to form the overall output

where
In this algorithm, ai is designed according to training error ei of every NN

where
Simulation results and analysis
To verify the effectiveness of the proposed approach, computer simulations using MATLAB software and its NN package, are conducted for the comparisons with other methods. As it is shown in Figure 3, the coordinates of the BSs are, respectively, set to BS1:(0, 0) cm, BS2:(0, 60) cm, BS3:(60, 0) cm, BS4:(60, 60) cm, the MS location is chosen randomly in accordance with a uniform distribution within the region formed by the BSs. Then 200 TDOA data from four BSs are obtained. In the experiments, the data set is randomly split into two parts: training set and testing set, consisting of 80% and 20% of the samples, respectively. Training set is used to train the individuals in the ensemble model, and ensemble’s generalization ability is tested on the testing set. The individual one is BPNN under the optimization of ALO method. The hidden neuron numbers of all the NN are designed to be four, and sigmoid logistic transfer function is selected as the activation function of the hidden and output layers. The testing error is defined as a mean absolute difference between actual and estimated positions of testing points. In order to validate the experimental results and to ensure statistical independence, all experiments have been repeated 50 times. The population is set to 100 for all the optimization method, and the maximum number of iterations is set to 200. Regarding the NLOS effects in the simulations, the uniformly distributed noise model is applied in the simulation, in which the TOA measurement error is assumed to be uniformly distributed over (0, U), where U is the upper bound of the error.

Positions of the MSs and BSs.
Comparison with the classical source localization methods
To start with the comparison of the localization methods, the results of the classical source localization method as described previously are presented in Figures 4 and 5, which show the experimental results obtained by sample points and signal-to-noise ratio (SNR), respectively. In order to show Figures 4(a) and 5(a) in detail, Figures 4(b) and 5(b) present the localization error with the unit of decibel.

Performance of classical source localization methods with different testing points.
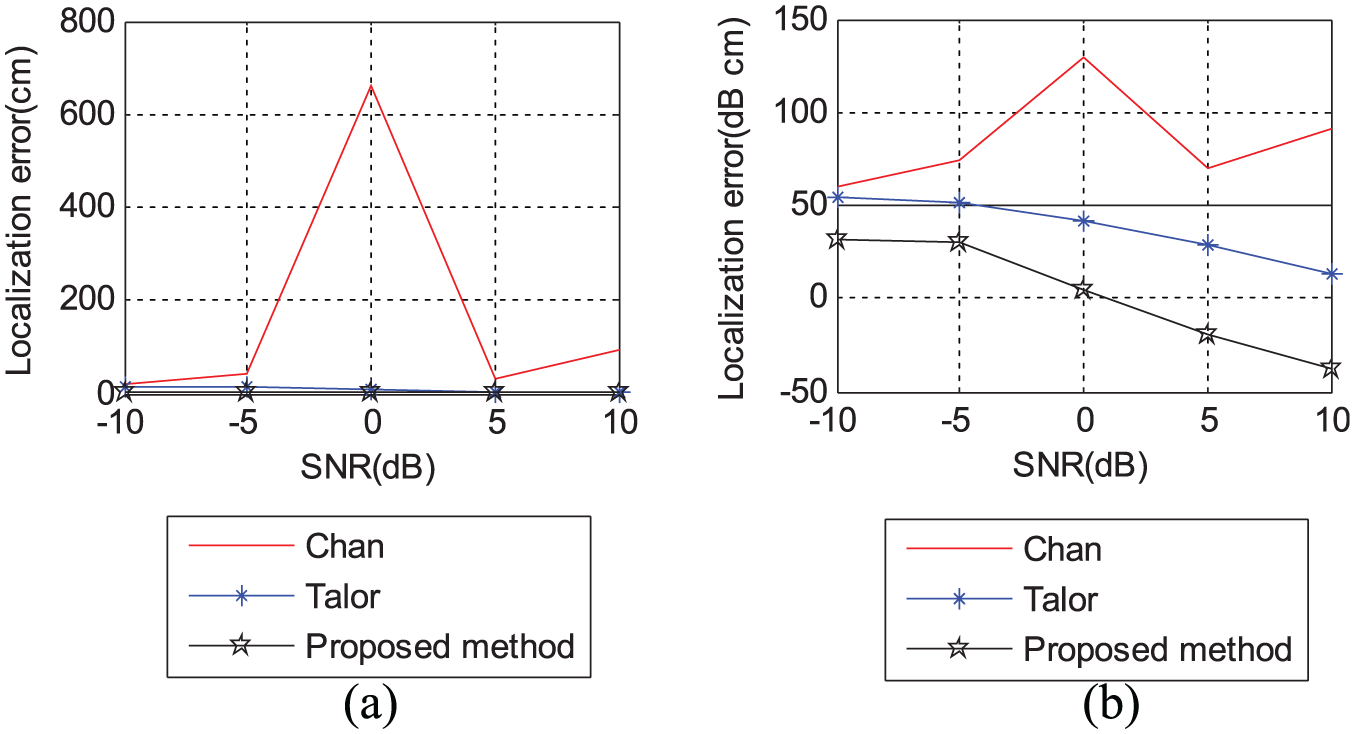
Performance of classical source localization methods with different SNRs.
Based on Taylor-iteration method and Chan’s method, it can be observed that there is a systematically stronger deviation close to the sensor positions in the NLOS environment. This is because Taylor-iteration method and Chan’s method respectively use the iterative and non-iterative solution to achieve optimum performance, which are greatly affected by the heavy noise due to NLOS fact. When the propagation channels between MS and BSs are in LOS conditions where direct paths are available in their instantaneous power delay profiles, localization accuracies of Taylor-iteration method and Chan’s method are high. However, once one of the channels is in an NLOS condition where the propagation delay time is positively biased, they are severely lowered. 12 But, it can be observed that the proposed algorithm can reduce the localization errors effectively.
Comparison with the NN-based source localization method
In order to prove the generalization ability of the proposed NN ensemble model, the source localization results are now presented for the NN-based methods, including neural network using radius data (NN-R), 5 neural network using 2D coordinates data of intersections (NN-Coordinate), 12 Chan’s method after neural network filtering (NN-Chan), 13 neural network using time difference (NN-TD), 15 and the proposed neural network using 1D coordinates data of intersections (NN-XY-Coordinate) in this work. All the NN-based methods use the same input data and configurations as discussed for the classical source localization procedure. As can be appreciated in Figure 6, the results obtained in this work outperform other research works, being able to achieve a low localization error. As it is shown in Wu et al., 13 NN-Chan uses the NN to amend TDOA measurements and then uses the Chan’s method to estimate the MS locations. However, the NN cannot perform very well as a filter in NLOS environment. Through the experiment, it is proved that other NN-based localization methods using different information from TDOA measurements can improve the precision of MS positioning.

Performance of localization methods–based neural network.
Optimization performance for source localization
Before the NN is used to estimate MS location, the parameters of the network should be set first. To avoid constructing worse network models, the parameters, such as the weights and biases have been optimized in this work. As it is shown by Mirjalili, 21 compared with the ALO, other optimization methods have lower precision and convergence speed. Therefore, this study uses the ALO to determine the initial weights and threshold for BPNN.
Based on the previous proposed model of NN 3 and NN 4, the experiments are carried out using and without ALO method, in order to demonstrate the advantage of ALO method. The final results of localization are presented in Figures 7 and 8.

ALO performance for localization-based neural network 3.

ALO performance for localization-based neural network 4.
The red lines are the results of estimation without optimal parameters. The result of localization using optimized NN is presented with black line. We can see that the BPNN optimized by ALO has better performance.
The proposed ensemble method–based ALO is also compared with the one using genetic algorithm (GA-Ensemble NN), which is shown in Figure 9. The experiments prove the effectiveness of the ALO in solving NN optimization and localization problems under the uncertainties of MS positions and obtained TDOAs.
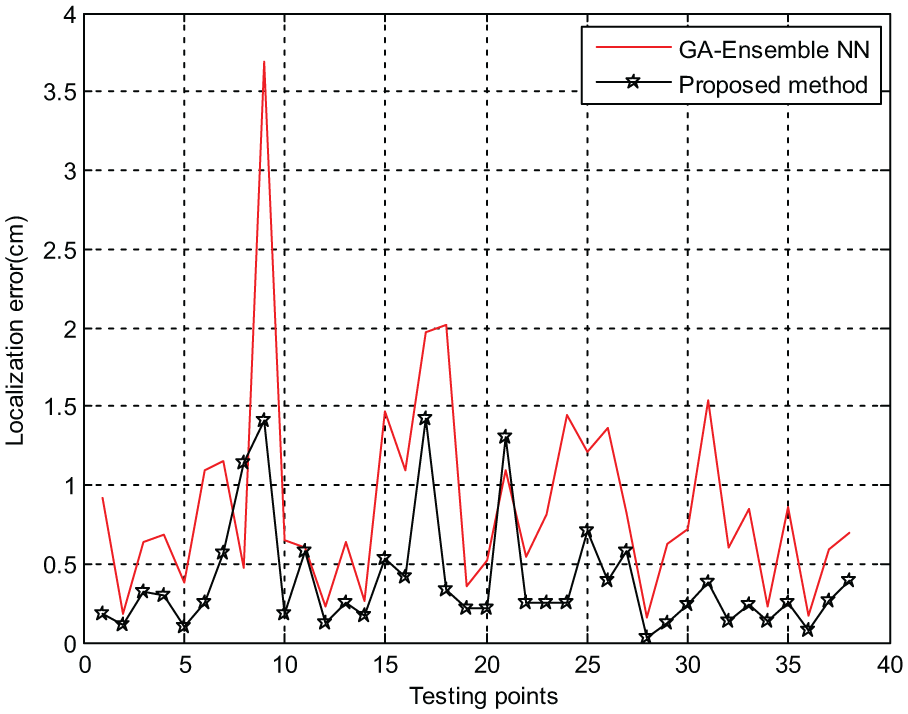
ALO performance for localization-based neural network ensemble.
Localization performance for ensemble model
We also tested the performance of the proposed model with different SNR. Figures 10 and 11 show the experimental results obtained by varying the SNR. In order to show Figures 10(a) and 11(a) in detail, Figures 10(b) and 11(b) present the localization error with the unit of decibel. It is established that NN-Chan had the worst performance compared to the other methods. Meanwhile, NN 4 proposed in this article achieves better performance than the other individual NN-based methods. Figures 10 and 11 also establish that the proposed ensemble model outperforms all the individual NN. In this work, we attempt to use the differences information of the TDOA measurements to improve the positioning performance. In addition, four separate NNs are trained by time difference of arrival, radius data, 2D coordinates data of intersections, and 1D coordinates data of intersections, respectively.

Localization performance comparison 1–based neural network ensemble.

Localization performance comparison 2–based neural network ensemble.
An artificial NN ensemble has better generalization ability and stability than a single network. Here, we combined BP networks with ALO, yielding an optimized BP network ensemble model. In this study, the NN supported by ALO proved its efficiency to predict the MS position. Employing ALO to enhance the performance of BPNN to the required prediction adds an innovation to this study. The improved weighted average is used to combine the outputs of the different individual networks and the weights are determined by the training error of the individual NN. This ensemble strategy is effective to improve the generalization ability and effectiveness of the model.
Conclusion
This article presents a novel localization algorithm based on NN ensemble model to estimate MS position in NLOS environments. In order to build an excellent NN model, the parameters, such as the weights and biases of the single BPNN are optimized by the novel ALO method. During the training period, four NNs are trained to establish the nonlinear relationship between different TDOA information and MS position. After combining the outputs of all the individual NN, the proposed algorithm can improve MS position estimate accuracy. The simulation results show that the proposed algorithm can obtain more precise location accuracy.
Footnotes
Acknowledgements
The authors would like to thank the anonymous reviewers for their insightful comments and suggestions that have contributed to improve this paper.
Handling Editor: Li-Minn Ang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Fund (grant nos. 61871203 and 61671239) in China, the China Postdoctoral Science Foundation (grant no.: 2016M592334), and the Qing Lan Project of Jiangsu Province.