
Abstract
When one agent simultaneously measures multiple teammates in cooperative localization, how to share these relative measurements with low-cost communication is interesting. In this chapter, different communication requirements for sharing absolute measurement and relative measurement are analyzed under extended Kalman filtering, whereby we develop an algorithm to convert multiple relative measurements into one virtual absolute measurement. By this, less number of elements are required to be transmitted across the agents. The utilization of multi-relative measurements is changed to the mode of one round communication from conventional mode where the measurements are processed and broadcast one by one. Simulation results demonstrate that, using the virtual absolute measurement, the almost equal localization performance with real relative measurements is obtained.
Keywords
1. Introduction
Multi-agent cooperation has great potential on forest monitoring, disaster rescuing, and so on. Accurate localization is a premise for these tasks. As a novel localization strategy, cooperative localization (CL) provides higher positioning accuracy over independent localization (IL) where each agent solves its localization by itself. In some application scenes, where not all agents have accuracy localization due to the environment or hardware level, the advantages of CL are prominent [1–4].
In CL, an agent equipped with the wide-field exteroceptive sensor may simultaneously detect multiple agents moving in its vicinity, especially in mobile robot community. This case is regarded as the

Comparison of different communication strategies in the context of multi-relative measurements. (a) Example of multi-relative measurements where agent 4 detects agents 1, 2, 3 at the same time. (b) Sequential process and sequential dissemination. (c) One round communication.
In CL, the exteroceptive measurement (e.g., relative distance/bearing, GPS) occurring in single agent will help all agents to refine their position estimates. In order to share the exteroceptive measurement across the agents, they are usually converted into a locating message that contains the useful positioning elements for network flowing. In this paper, we pursue a new form of locating message that, (1) contains less elements; and, (2) has the approximate equal effect on CL as the SPSD.
Here, some special terms used throughout this paper are defined. The agent that implements exteroceptive measurements is called as the
1.1. Related works
Many effective algorithms for CL have been developed. These algorithms can be largely divided into two categories: the centralized CL (CCL) [5] and the distributed CL (DCL) [6, 7]. Considering computational cost, reliability and survivability (especially in war situation), the DCL is more attractive than the CCL. Corresponding to the CCL and the DCL, many estimation techniques have also been investigated, for example, filtering [8–13], parameter estimation [14] and optimization techniques [15].
When communication consumption is primarily considered, neither the parameter estimation nor the optimization technique is suitable due to the infinite iterations and communication [4, 14]; therefore, in this paper, the extended Kalman filtering (EKF) is employed, where the state estimate and its uncertainty are maintained together. We focus on pursuing a new form of locating message under the EKF.
Most recently, the communication constraint has been studied in some literatures [16–18]. Some typical algorithms such as IQKF (iteration quantized KF) [19], SoI-KF (sign of innovations KF) [20], have been designed to minimize communication bytes. These methods are designed originally for the multi-sensor community like target tracking problem (
In ref.[17], an optimal strategy is employed to minimize the exteroceptive measurement frequency; correspondingly, the communication frequency for the measurement sharing are also reduced. In ref.[22], the egocentric KF is proposed where the state error correlation 1 , measured by the covariance, is ignored. As a result, the element types for exchanging are reduced. However, due to ignoring the state error correlation, the state estimator will diverge. To address this drawback, the covariance intersection filter (CIF) technique as well as the improved split CIF is developed for CL [12, 13]. By this technique, the covariance is not necessary to be always maintained, and it can be conservatively calculated whenever it is needed.
Under the condition of full network connectivity (i.e., each agent can communicate freely), it has been proved that the covariance can be well maintained in the distributed manner [8]. By the continual decomposition and combination of covariance matrix, the covariance can be independently propagated by each agent and the centralized-equivalent localization performance is achieved.
In the above methods, the communication requirements are lowered in term of the communication quantization, the communication frequency, or the communicated element types; but few work is studied on the communication strategy. For the case of multi-relative measurements, the common strategy is the SPSD where many communication resources are required. This strategy can also be tracked in refs.[6, 12, 23].
1.2. Contributions
In this paper, the DCL proposed in ref.[8] is employed as the fundamental framework of our algorithm. Based on their efforts, pursuing a small-sized locating message form is our focus. In this process, three contributions are devoted as follows.
According to the relative measurements to different observed agents, a series of position estimates on the measuring agent are obtained. Regarding these estimates as the virtual observations on the measuring agent, a virtual observation equation group is constructed and the statistical characteristic of the virtual noise is derived.
Relative measurements (one or more) are converted into one set of ‘pseudo-absolute locating message’ for network sharing, whereby less data need to be transmitted. In the conversion, the measurement update model of EKF is re-derived to avoid the overconfident use of virtual absolute measurement.
Multi-relative measurements are processed as a whole and then broadcast at one stroke (no matter how many relative measurements). Consequently, the communication constraint is mitigated.
Compared with the common method where the locating message is directly produced from the real relative measurements, the new algorithm can reduce the number of elements in the locating message by 33% in the case of one relative measurement.
1.3. Outline
The rest is organized as follows. In Section 2, the related models are formulated. In Section 3, how to convert the relative measurements into the pseudo-absolute locating message is described. In Section 4, the simulation results are presented to demonstrate the application of the proposed algorithm. In Section 5, the conclusions are stated and an outlook on the future work is pointed out.
Notation: In this paper, k is used to denote the time index. δ is used to denote the time interval from time step k to
2. System Models
We will derive the equations with 3 agents constituting a group (the same steps describe the derivation for more agents). Each agent has onboard proprioceptive and exteroceptive sensors. The proprioceptive sensor measures the self-motion (linear/rotational velocity). The exteroceptive sensor measures the relative pose to the others or obtains the absolute measurement.
2.1. State model
Assume that all the agents move in 2-dimensions plane. In a local fixed reference frame, each agent's pose is denoted as

It can be rewritten compactly as:

where

where, taking into consideration the measurement noise, the proprioceptive measurements



By linearizing (3), the linearized error-state propagation equation is expressed as:

where

2.2. Measurement model
Two kinds of exteroceptive measurements are considered:


where

By linearizing (7), and (8), the measurement error models are derived as follows:


where the measurement matrix
otherwise,

where

2.3. Cl model based on ekf
For the DCL, each agent carries out two operations alternately: self–estimation and exteroceptive measurement update.
2.3.1. Self–estimation
During no exteroceptive measurement occurring in any agent, at each time step k, the state of each agent can be independently propagated using its proprioceptive measurements as (1). Initially, assume that the whole error covariance matrix is

It can be found that
In CL, the exteroceptive measurement frequency is less than the proprioceptive measurement frequency due to different sensing capacity; therefore, each agent propagates its position by the self–estimation in most of the time. Once an exteroceptive measurement occurs, the predictive estimate will be refined.
2.3.2. Exteroceptive measurement update
When one agent obtains the absolute measurement or the relative measurement, all the states and covariances in the group will be updated as follows [6]:
Update caused by the absolute measurement
Assume that only agent 1 obtains an absolute measurement at a certain time. In the EKF framework, the state of each agent is updated as follows:

The covariance term is updated as:

with


where p denotes the state dimension.
Update caused by the relative measurement
Assume that only one measurement pair (agents 1 and 2) occurs at a certain time. Similar to case (1), the state of each agent is updated as follows:

The covariance term is updated as

with


where
Comparing
Comparison of two locating messages in size

In this paper, the strategy proposed in ref.[8], especially in the covariance maintaining, is employed for the DCL; however, what is communicated across the agents and in what form are our distinctions. Firstly, a general communication round for the DCL is given as follows. Three communication stages are divided according to the communication contexts. (1)
3. Similarity Conversion for Locating Message
In order to generate the small-sized locating message, two stages of the similarity conversion are studied: the relative measurement converting into one virtual absolute measurement and, the virtual absolute measurement converting into the pseudo-absolute locating message.
3.1. Partner estimate on measuring agent
For any measurement pair, the true states of them are constrained by 2 :

where

where
Based on the relative measurement and the observed agent's state, there exist an opinion (state estimate) on the measuring agent. For instance, assuming that agent 1 and agent 2 constitute a measurement pair and agent 1 is the measuring agent, then on the conditions of the known relative measurement

where the superscript {2} denotes that the state estimate is from the view of agent 2. Instead, this kind of estimate is called as the

where
Regarding the estimate set
3.2. Generation of virtual absolute measurement
It is known that the predictive estimate can be represented as:

where
Regarding the partner estimate set as a class of observation on the measuring agent, according to (22), a general expression of the observation model is proposed as follows:

where

Through the Taylor expansion of

where

For the simplification, define that


where
Arraying the vector entities in the partner estimate set

It can be compactly rewritten as

where

According to the available specific

where
3.3. Virtual absolute measurement to pseudo-absolute locating message
Based on the fact that
Regarding the solution process of (33) as a virtual measurement on the measuring agent 1, the measurement model can be proposed as:

where

With the virtual measurement model (37) and (24), the predictive measurement error can be represented as follows:

Its covariance matrix is that:

Compared with the usual measurement update model, the third and fourth terms are added to remove the effect from the correlation between the predictive estimate and the virtual absolute measurement.
The covariance of each predictive estimate error

Let

where
Regarding the available
The new algorithm can be summarized from the perspectives of sender and receiver.
3.4. Analysis of similarity conversion loss
In order to evaluate the valuable information from the real measurement and the virtual measurement respectively, the determinant of Fisher information matrix(FIM) is employed as scalar measures. The case of one relative measurement

For the real relative measurements, the determinant of FIM from the relative measurement

and

It means that there exists information loss in the similarity conversion, and it is the uncertainty of the state estimate that determines the loss of the similarity conversion. When the self–estimation runs in most of the time, the uncertainty of the state estimate is mainly determined by the proprioceptive sensor.
Additionally, in the centralized EKF (gold-standard benchmark) or some centralized-equivalent DCL, the linear measurement model is obtained by Taylor expansion at the predictive estimates of the measuring and the observed agent; so the proprioceptive sensors of both affect the accuracy and the algorithm convergence. While in our algorithm, the linear measurement model is not necessary; however, as (27), the taylor expansion is required to linearize the partner observation model at the predictive estimate of the observed agent and the relative measurement value; therefore, the similarity conversion is sensitive to the observed agent's state and the relative measurement noise.
4. Simulation and Analysis
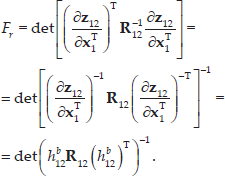
The performance of the proposed algorithm is evaluated with MATLAB simulations. Assume that three agents are approaching to the same object ‘T’, and each agent adjusts its orient dynamically by an ideal controller,
3
. Seeing Figure 2, the black lines denote the ground-truth trajectories. The homogeneous sensors are mounted on each agent. The basic simulation parameters are listed in Table 1. Simulation lasts for 180s. Agent 1 measures its relative poses to agents 2 and, 3 in a fixed interval. At the beginning of the simulation (

Relative layout of three agents and trajectory comparison with different locating messages. The initial positions are marked by ‘⋅’. The encircled object is marked by ‘
Firstly, different communication rounds under different strategies are compared in Figure 3. The effects from different relative measurements do not act on the state update in a linear addition manner. Figure 3(a) shows that generating the current locating message depends on the updated results from the last locating message. Hence, (1) its generation and broadcast are triggered only when the last one being utilized by all agents is confirmed. (2) Each relative measurement requires a round of covariance information exchanging across the group. In the setting scene, two rounds of communication are required. While in the proposed algorithm, as Figure 3(b), all relative measurements are processed as a whole and one round communication is enough for sharing the locating message. In what follows, what and how many elements are transmitted in the locating message sharing communication are contrasted firstly.

Comparison of the whole communication rounds with different strategies. (a) The procedure of the proposed strategy. (b) The procedure of the conventional strategy. The dotted frame denotes the non-communication part.
Simulation Parameters Setting
4.1. Elements comparison in different locating message
In the simulation, only one agent can obtain multiple relative measurements. Here, assume that agent 1 measures agents 2 and 3 simultaneously every 1.5 seconds. In order to share the benefits from the measurements, in the common methods, two sets of locating message, i.e.,
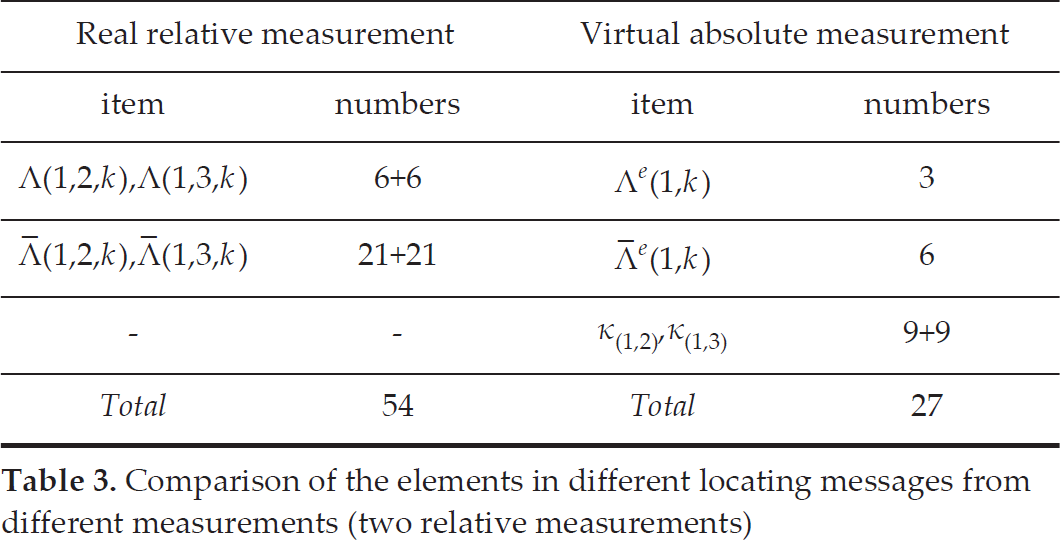
The communicated element items as well as their corresponding sizes are listed in Table 3 (the covariance is maintained as in [8] and the requirement for it is not contrasted). Figure 4 presents a contrast in term of the communicated elements with different numbers of relative measurements. It can be found that, compared with the real locating message, the number of elements in the pseudo-absolute locating message are cut down about 33% (from 27 to 18 numbers) for one relative measurement. This benefit will be more striking when more relative measurements occur.

Comparison of the number of elements in different locating messages under different relative measurements
Comparison of the elements in different locating messages from different measurements (two relative measurements)
4.2. Localization performance comparison
Although the size of locating message is reduced, Figure 2 shows that, using the pseudo-absolute locating message, the position performance drops relative to that of the real locating message. Hence, the low communication cost is achieved at the expense of CL accuracy. As the statements in Section 3.4, it is caused by the similarity conversion loss.
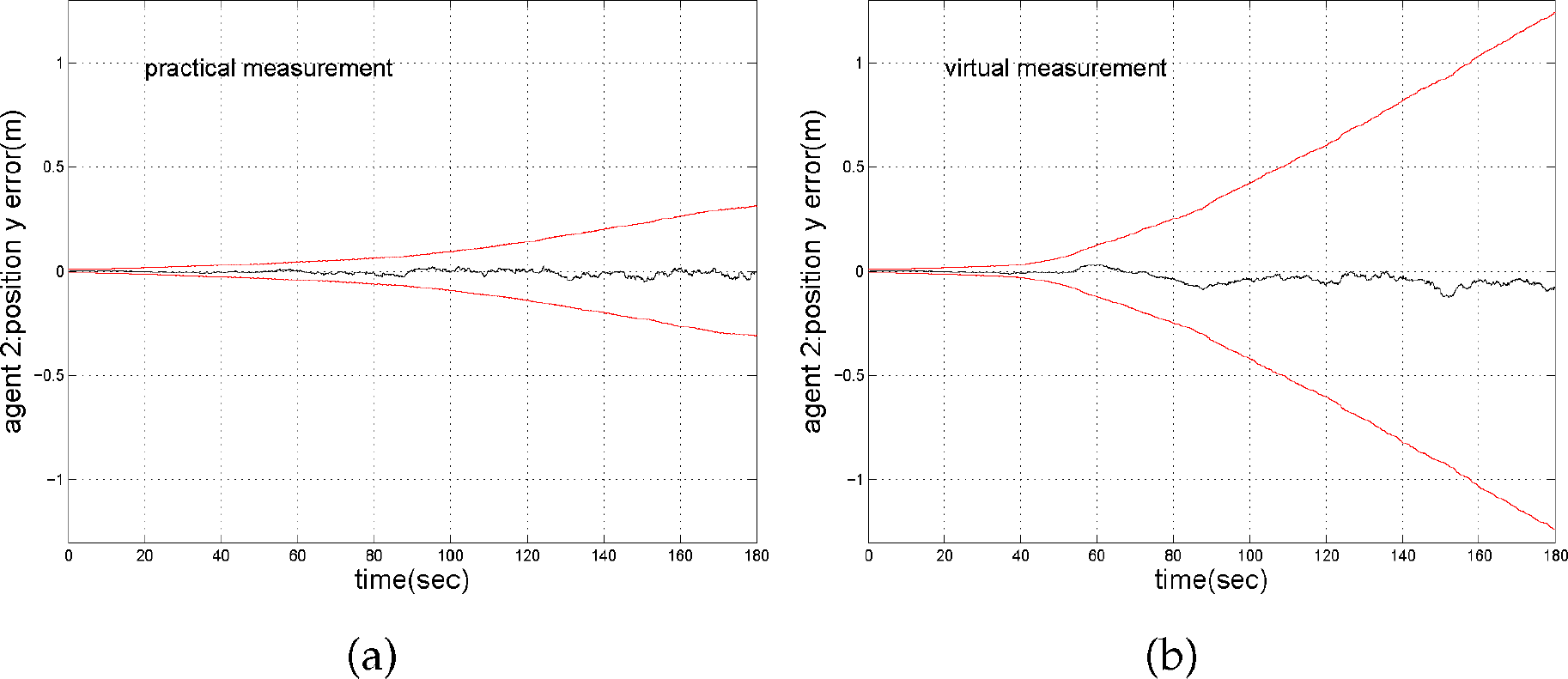
For the measuring agent and the observed agent, Figures 5, and 6 respectively, present the position y errors between the true trajectory and the trajectory from the virtual absolute measurement. The bounding lines denote the

Position y error for the measuring agent 1. (a) In the case of the real measurement. (b) In the case of the virtual absolute measurement. The two bounding lines determine the 3σ region of confidence for the position y error, and they are calculated based on the covariance of the position y estimate.
Position y error for the observed agent 2 under the two different measurements. Agent 2 always is the observed agent.
With respect to the measuring agent 1, all the relative measurements are converted into a virtual observation on it and then intensively acted on its state estimate. Consequently, in spite of the similarity conversion loss, the bound uncertainties from the real measurement and the virtual absolute measurement are in the same order as Figure 5. While, for the observed agent, the position uncertainty from the virtual measurement is almost one order of magnitude larger compared with the case of the real measurement; see Figure 6. It means the similarity conversion loss is burden by the observed agent. With the same three agents, if we assume that each agent takes turns at measuring the relative pose to the others (each agent can become the measuring agent in turn), then the similarity conversion loss is averagely burden over a period of time. As a result, for any agent, the localization uncertainty is reduced, and the localization uncertainties from the real measurement and the virtual measurement are in the same order as Figure 7.

Position y error for agent 2 under the two different measurements. Each agent can become the measuring agent in turn.
4.3. Sensor performance effect on similarity conversion
The effect of the sensor performance on the proposed algorithm is depicted in Figure 8. It can be found that, with the performance of the relative measurement decreasing, the distance error between the true trajectory and the trajectory from the pseudo-absolute locating message grows. It means that the similarity conversion is sensitive to the performance of exteroceptive sensor. If the low precision exteroceptive sensor is adopted, the convergence of the proposed algorithm cannot be assured; of course, under this circumstance, the measurement information is not also significant for other CL algorithm. The effect of the proprioceptive sensor performance is also given in Figure 8(b). With the proprioceptive sensor performance decreasing, the localization performance is degenerating.

Distance error between the trajectories from the pseudo-absolute locating message and the true trajectories of the observed agent 2. (a) Different exteroceptive sensor. (b) Different proprioceptive sensor. σb is a diagonal matrix of the measurement variance of relative distance/bearing/orientation in Table 2. σc is a diagonal matrix of the measurement variance of linear/rotational velocity.
The usefulness of our algorithm is also tested by the truth datasets from the Autonomous Space Robotics Lab (ASRL) of University of Toronto. The datasets are intended for studying the problems of cooperative localization. 5 iRobot Create robots move in a 15m × 8m indoor area randomly. The proprioceptive and relative measurement data, accurate landmark and groundtruth position data from a motion capture system are collected. More details can be found through http://asrl.utias.utoronto.ca/datasets/index.html.
A total of nine datasets are provided by the ASRL. The second dataset is employed in our test. Here, only part data in dataset 2 are employed for our test 5 . Different from our simulation scene, there exist the real absolute measurements in the second dataset. Using our algorithm, the results are shown as Figure 9. Compared with the unbounded drift trajectory (no cooperation), it can be found that the trajectories estimated by our algorithm are much close to the groundtruth trajectories. It manifests the usefulness of our algorithm.

The trajectories of five agents by the proposed algorithm. ‘⋅’ denotes the initial position. □ denotes the landmark.
5. Conclusions
In order to reduce the communication requirement of CL, when one or more relative measurements occur in a group, they are converted into the pseudo-absolute locating message by the similarity conversion. In this way, the locating message form for CL are unified and the small-sized locating message is supplied for network flowing. Even so, the basic function of CL, i.e., the local measurement refines all the position estimates, can still be realized. In the context of multiple relative measurements, benefiting from the similarity conversion, one-pass communication mode is naturally employed, and it outperforms the sequential dissemination mode in term of the communication requirement.
In the similarity conversion, firstly, based on the relative measurement to each observed agent, a series of partner estimates on the same measuring agent are obtained. Secondly, all the partner estimates are used to construct a virtual observation equation where the measuring agent's state is an unknown variable, and its solution is regarded as a virtual absolute measurement on the measuring agent. Thirdly, the virtual absolute measurement is used for the EKF measurement update. In the conversion, two issues are addressed. One is that the various partner estimates on the same measuring agent are correlated. The other is that the virtual absolute measurement correlates with the predictive estimate of each observed agent. For the former, a close-form expression is given to characterize the error correlation among the partner estimates. For the latter, the EKF measurement update is re-modeled, and the extra elements corresponding to this correlation are added to the pseudo-absolute locating message packet; even so, the number of elements in the pseudo-absolute locating message still are smaller than that from the real relative measurement. With more relative measurements, the advantages in reducing communication requirement are more prominent.
In the proposed algorithm, the utilization of the real measurements is relatively conservative. The influence factors on the similarity conversion loss are analyzed and verified in the simulation. The proposed algorithm has a good effect when high performance exteroceptive sensors are employed. The proposed algorithm is not sensitive to the performance of proprioceptive sensor on the measuring agent.
The conclusions are obtained on the assumption of only one measuring agent in the group at a time step. In the next work, it should be extended to the case of multiple measuring agents at a time step.
Footnotes
1
In the EKF CL, the estimated states of all agents are interdependent and the correlation is quantified by covariance.
2
In the following representations, the time index k is omitted to simplify notation.
3
Assume that the ideal controller can eliminate the positioning errors from the controller or actuator. Based on this assumption, all the positioning errors are from the sensors and algorithm.
4
5
If the whole dataset is employed, much longer trajectories will be depicted in the same figure. Then they are chaotic and the local characters won't be obvious.