
Abstract
Passive localization of the wireless signal source attracts a considerable level of research interest for its wide applications in modern wireless communication systems. To accurately locate the signal source passively in the downtown area, sensors are carried on the unmanned aerial vehicles flying in the air, where the wireless sensor network can be established with an optimal geometry configuration conveniently. In this case, the influence of multipath fading can be avoided and the time difference of arrival measurement can be estimated precisely in Rician channel. By employing the operating center as a calibration source to refine the positions of the unmanned aerial vehicles, we present a simplified formulation of the time difference of arrival localization method according to the min-max criterion. To accurately estimate the position of the source, the nonlinear equations are relaxed using semidefinite programming to obtain an initial solution, which is utilized as the starting point of the iterative algorithm to refine the solution. In the simulation section, the validity and the robustness of the proposed methods are verified through the performance comparison with the Cramer–Rao lower bound.
Keywords
Introduction
With the rapid development of information technologies and wireless communications, passive localization of the signal source has been of considerable interest in several fields such as wireless communications,1–3 sensor networks,4–6 microphone arrays,7,8 sonar,9,10 and electronic warfare (EW).11–13 The passive localization technology only locates the position of the source through receiving the electromagnetic signals, which does not need the surveillance equipment transmitting a radio signal to the measured target. Because of the far operating distance and the good concealment advantage, passive localization becomes an important component of the electronic counter measure (ECM).14,15 Among various classical algorithms for the signal source passive localization, the method of time difference of arrival (TDOA) based on wireless sensor network (WSN) is popular and has extensive application. The TDOA-based localization method is usually accomplished based on a two-step approach, that is, the “association” step and the “information-fusion” step; certain parameters such as the TDOA measurement at the receivers are obtained from the target source emissions. In the “information-fusion” step, the position of the target source is estimated by solving a set of nonlinear equations. 16
Over the past decades, WSN as a significant technology has attracted considerable research interest.17,18 Due to small size, low cost, wireless network, and deployment in large numbers, WSN can provide unprecedented opportunities for information collection, monitoring, and device control.19,20 Although the passive localization method of TDOA based on WSN has an excellent accuracy and response time, the multipath transmission channel and shadow fading worsen the localization performance greatly in the downtown area, which is largely because the sensors are bedded on the ground. However, combining the WSN and unmanned aerial vehicle (UAV) technology, these drawbacks can be overcome for the perfect environment in the free space. That means the sensors are loaded on the UAV flying in the air to capture the signal and locate the signal source, which could ensure that the transmission channel is line of sight (LOS). In practice, this scenario is already conditional on the implementation of the UAV and the WSN for the modern technologies.
The technology of the signal source passive localization using a receiver loaded on UAVs has been studied extensively. Many previous works focused on the issue of passively localizing the radar source. Mallick et al. 21 utilize the unscented Kalman filter (UKF) and particle filter (PF) to accurately estimate the radar’s position with UAVs capturing the signals in the air. Okello and Musicki 22 proposed the method to accurately locate the pulse signal source such as the radar source, where the leading edge of the electromagnetic pulse is detected to estimate the time information in the “association” step using an EW support sensor loaded on a single UAV. To locate the radar source more precisely, we introduced the concept of passive synthetic aperture antenna array (PSAAA) to passively localize the hostile radar’s position based on a single small-sized aircraft in Hao et al. 23 Taking full advantage of the aircraft movement and the radar antenna circular rotation, an effective method is proposed to estimate the virtual time difference of arrival (VTDOA), while the PSAAA technology is unsuitable to passively localize the radio frequency (RF) signal source. It should be pointed out that the three methods mentioned above are exploited only about the radar source, which is unavailable for the continuous signal source. In Liang and Samn, 24 block phase estimation (BPE) method is exploited to estimate the wireless channel based on two parallel antennas equipped on a small flying UAV, then the parameters of time delay are obtained based on the channel comparison. Obviously, the localization accuracy is determined by the distance between the parallel antennas and the wavelength of the RF signal. Kim et al. 25 presented a regional localization scheme using UAV for the battlefield environment in the situation where the global navigation satellite system (GNSS) is locally unavailable. It is challenging to provide the exact positions of the nodes in such a scenario. For the excellent performance of the extensions of the Kalman filter algorithms, in the “information-fusion” step, Fletcher et al. 26 obtained the position of the moving emitter using the extended Kalman filter (EKF) and a UKF, Plett et al. 27 propose a sensor-fusion methodology based on sigma-point Kalman filtering (SPKF) techniques to localize a mobile target. Although these two methods are based on the UAV platform, the optimal geometry configuration and the positional errors of the involved sensors are out of consideration, which could generate an inevitable error in the final localization result.
To passively and accurately locate the RF signal source, a group of UAVs are utilized flying in the air to estimate the position of the source in this study. The sensors loaded on the UAV form a micro WSN in the air, and taking full advantage of the controllable UAV, we present a more precise estimation method to locate the signal source in the downtown area. The main contributions of this article are as follows:
Optimal geometry distribution of the UAVs in the air. The flight paths of the UAVs in the air are controlled under the instruction from the operating center, which means that the optimal geometry distribution of the sensors on the UAV can be satisfied easily under manual control. We present the optimal geometry distribution of the UAV during passive localization of the signal source, and its more accurate performance is verified in the simulation.
Calibration of the positional errors of the UAVs. Due to the movement of the UAV flying, the positions of the UAVs contain certain offset, which introduce a considerable estimation error in the final localization result. In this study, we utilize the operating center of the UAVs as a calibration source to refine the positions of the UAVs.
More accurate localization algorithm. In the “information-fusion” step, the semidefinite relaxation technique is exploited to resolve the quadratic optimization problems and obtain the initial position of the source, which is utilized as the starting point of the numerical iteration algorithm to refine the obtained position of the signal source.
The rest of the article is organized as follows: Section “System model” presents the system model of the signal source passive localization based on the optimal geometry distribution of the UAVs, which can form a WSN in the air. In section “Source localization based on TDOA,” the positional errors of the UAVs are refined and the TDOA measurement is estimated first, then the relaxation technique of semidefinite programming (SDP) and the iteration method of the Powell minimum search algorithm are given. Section “Simulations and performance analysis” illustrates the simulation results and performance comparison. The conclusions are drawn in section “Conclusion.”
System model
In three-dimensional (3D) space, at least four sensors are needed for the TDOA-based localization system to locate the signal source. Suppose the stationary signal source is fixed at

where

The system model of the signal source passive localization in the downtown environment based on the WSN loaded on the UAV group is shown in Figure 1. Four homogeneous sensors

System model of signal source localization in the downtown environment. (The procedure of localization: source → UAVs which measure source wave → operating center which executes the localization algorithm.)
Obviously, when the sensors are loaded on the UAVs in the air, the transmission channel between the signal source and the sensors is Rician channel, which means that the received noise is distance dependent. Employing the D-optimality algorithm to maximize the determinant of the FIM, Huang et al. 28 claimed that the localization system has a better accuracy when the four sensors are distributed at the vertices of any regular tetrahedron. In other words, the optimal geometry configuration of the UAVs is a regular tetrahedral distribution, which can be achieved through the instructions emitted from the operating center of the UAVs. In the following sections, we assume all the four UAVs flying parallel and keep the regular tetrahedral distribution in the air under the control of the operating center. Meanwhile, the UAVs are hovering in the same place when they receive the signal emitted from the target source.
As depicted in Figure 1, when the uncooperative signal source radiates the wireless signal into the space, the synchronized sensors loaded on the UAVs capture it immediately, and then all the received signals are sent to the operating center, where the localization algorithm is executed and the position of the signal source can be obtained. The sensors connect with each other forming a WSN in the air, which is useful to maintain synchronized time and transmit data to the operating center cooperatively. Besides execution of the localization algorithm, the operating center also sends the instructions and the calibrating signal to all the sensors continuously. Generally speaking, when we want to localize an unknown signal source in the downtown environment, it is usually an emergency circumstances, such as quickly prohibiting the harmfully illegal radio or the city anti-terrorism, where the higher the localization accuracy (e.g., less than 10 m or even), the better. The positional errors of the involved sensors and the method to accurately resolve the nonlinear equation are the major sources of the localization error, which would be mainly settled in the following section.
As for the system model depicted in Figure 1, there are some notes that should be mentioned before the signal source passive localization.
Even though the UAVs are assumed hovering in the air during signal collection, their positions are imprecise for the limited condition and the atmospheric fluctuation. Fortunately, we can refine the uncertain positions using the operating center as a calibration source.
Due to the WSN loaded on the UAV group flying over the urban area, the transmission channel between the signal source and the sensors is Rician fading. In the following sections, we do not consider the influence of multipath transmission.
Because the UAVs are flying with an unchanged geometrical configuration in the sky, the effect caused by the frequency difference of arrival (FDOA) is too small and can be neglected.
Just as indicated by Yang et al.,
29
although selecting an arbitrary sensor as the reference note does not change the Cramer–Rao lower bound (CRLB), localization algorithms are often biased and the accuracy of a specific localization method may change with different reference sensors. In this article, the sensor
Source localization based on TDOA
In this section, the positions of the UAVs are refined based on the traditional time of arrival (TOA) method first, where the operating center of the UAVs is taken as the calibration source. Based on the TDOA measurement, the TDOA localization function is established as a nonconvex problem. Finally, the position of the signal source is refined using the Powell minimum search algorithm, where the initial solution is obtained by the SDP method in advance.
Refining the positions of the UAVs
Generally, UAV has many advantages, such as light weight and small size. However, many necessary devices are needed to be loaded on the UAV, such as signal receiver, control system, needful data processing unit, power supply unit, and self-positioning system. Therefore, limited by the power supply and the carrying capacity of the UAVs, the obtained UAVs’ positions are uncertain. Meanwhile, the atmospheric motion also has an influence on the self-localization of the UAVs while it is receiving the signal. It is well known that uncertain sensor positions have a significant impact on the TDOA localization result.
To accurately locate the signal source, the obtained positions of the UAVs should be refined before post-processing. Here, the operating center of the UAVs is taken as a calibration source to refine the UAVs’ positions. The operating center transmits a calibration signal and its position
With the synchronized clock between the sensors on the UAVs and the operating center, the TOA of the calibration signal arrival at the sensor

where

Obviously, the maximum likelihood estimate (MLE) of the position error parameter

Then the UAVs’ positions can be refined based on the obtained
TDOA estimation of source localization
Time delay estimation (TDE) is a basic technique for the TDOA-based signal source passive localization. Many techniques exist for TDE, but the most popular and useful algorithms in practice are based on the generalized cross-correlation (GCC) algorithm. The delay estimate between two sensors is obtained as the time lag that maximizes the cross-correlation between the filtered versions of the received signals. This method is well studied and performs fairly well in moderately noisy and nonreverberant environments. However, if the TDE is estimated directly using the GCC algorithm, it will produce large errors in the result. To reduce the influence of noise and interference, we estimate the TDE with the inverse Fourier transform of the product of the cross-spectral density and the phase transforming in this article.
As shown in Figure 1, the signal emitted from the source
Consequently, the GCC of

Maximizing equation (6) provides an accurate estimation of the TDOA

Particularly, due to the special geometry configuration of the UAV group, it is probable to have an interesting phenomenon that all of the obtained TDOA values are
Establishing the TDOA localization function
Utilizing the exact positions of the sensors

where
Modifying the problem formulation by rewriting equation (6) as

we obtain

As for
To obtain a globally convergent solution, the min-max criterion will be adopted to find a simplified formulation

It is challenging to resolve a nonconvex problem like equation (11). We introduce a simple relaxation approach to translate the issue into a convex optimization problem. To further refine the localization accuracy, the estimation will be taken as the initial starting point of the iterative algorithm.
SDP relaxation formulation of TDOA
The direct solution of the TDOA localization function in equation (11) is a nonconvex optimization problem. In Yang et al., 29 a novel relaxed convex algorithm was proposed, in which all the TDOA measurements are involved. However, its reliance on independent TDOA noise assumption makes it more sensitive to the TDOA model in which the noises are correlated. In addition, the complexity can be quite high by including all the TDOA measurements.
To develop a simpler TDOA algorithm, we can designate a single sensor node as the reference node
Three new auxiliary variables are introduced into the TDOA problem, which are the inner product

Obviously, the two auxiliary variables

Afterwards, the variable

The optimization problem explained in equation (14) contains both linear equality and inequality constraints, which could be resolved using the classic convex optimization methods such as the interior point.
31
Because without loss of information, no additional post-processing is necessary for the relaxation method presented above, which could directly yield the estimated position of the source
Refining the approximation solution
Generally, an approximation solution can be obtained by the SDP algorithm, which is close to the optimal solution. To further refine the obtained position
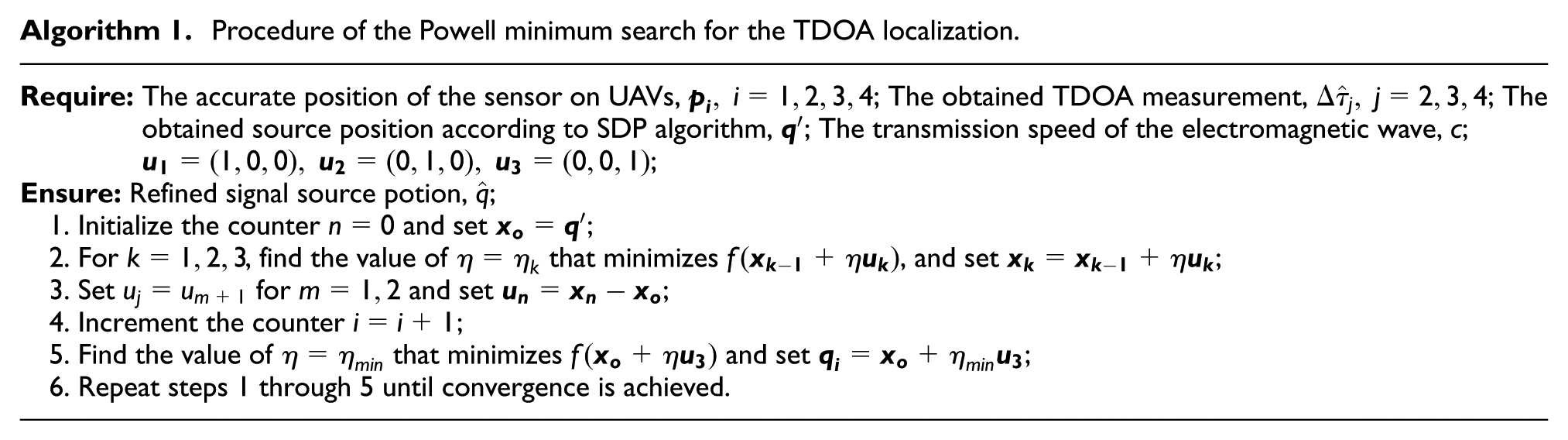
The Powell minimum search algorithm is a strictly conjugate direction algorithm, which does not need the objective function differentiable and no derivatives. The method could minimize the objective function by a bidirectional search along each search vector, in turn. Then the new solution is expressed as a linear combination of the search vectors. The new displacement vector becomes a new search vector and is added to the end of the search vector list. The Powell minimum search algorithm is useful to calculate the local minimum of a continuous but complex objective function.
Because the mentioned algorithm is a classical mathematical iteration method, we present only its procedure here. For simplicity, equation (11) is replaced with
Procedure of the Powell minimum search for the TDOA localization.
Simulations and performance analysis
In this section, simulations are carried out to evaluate the localization performance of the proposed method. The positional errors of the UAVs, the topological structure of the sensors and the source, and some state-of-the-art schemes and the CRLB are considered in the performance comparison. The localization accuracy of the signal source

where
In the 3D coordinate system, the position of the UAVs’ operation center is taken as the origin of the coordinates. Four distributed sensors make up a small WSN in the sky, which are loaded on the UAVs, thus forming a regular tetrahedron. The average flight height of the UAVs is about 200 m and the distance between any pair of the sensors is 50 m. Two signal sources are fixed near the ground, which are the targets of the passive localization. The precise positions of the sensors and two sources are shown in Table 1, and their relative positions are intuitively shown in Figure 2. Because the sensors are carried in the sky, the transmission from the sources to the sensors occurs through LOS channels, even though the source is settled in a complex environment. However, the positions of the sensors contain small positional errors due to the flying of the UAVs. In the following simulations, the sensor
Positions of the sensors and sources (m).


Precise positions of the sensors and the sources.
Performance comparison when the sensors’ positions contain errors
Both the distribution of the UAVs and the sensors’ positional errors are considered in this simulation to verify the availability and robustness of the proposed method. For the signal source

Performance comparison of the sensor’s distribution and positional errors.
As shown in Figure 3, the localization accuracy of the certain distributed sensors is better than that of the randomly distributed sensors, which is consistent with the conclusion of Okello and Musicki.
22
For example, when the standard deviation of the noise varies
Performance comparison with the classical method
In this simulation, we compare the performance of the proposed algorithm with other algorithms. Recall that the state-of-the-art schemes achieve location estimation through solving a set of linear equations. By adding a redundant parameter to the solution of the classic linear algorithm, the TWLS algorithm
30
improves the TDOA localization performance. The squared range-difference measurement (SRD-LS) algorithm
32
also adds a correction parameter to the LS inverse matrix. Our numerical simulation results are compared against these two algorithms. Moreover, we compare the results against the CRLB in Chan and Ho.
30
To be more fair, the sensor

Performance comparison with the state-of-the-art schemes.
From Figure 4, when the distribution of the sensors has a regular tetrahedral distribution in the sky, the localization errors of the three mentioned methods are similar to each other (within 3 m), while the differences are existent. The TWLS method has a better localization performance than the SRD-LS method, and obviously the performance of the proposed method is better than the other two and closer to that of CRLB. It is mainly because the proposed method combines the excellent performance of the SDP algorithm and the iterative algorithm to resolve the nonlinear localization function.
Performance comparison for two different signal sources
In this simulation, the TWLS localization method is adopted for the performance comparison to locate the two signal sources

Performance comparison for the two different signal sources.
As shown in Figure 5, for the near-field localization condition, the proposed method has an obvious performance advantage than the TWLS localization method, which is because the proposed method combines the SDP technology and the classical iterative method to resolve the nonlinear localization equations, thus obtaining more accurate performance while increasing the computational complexity. Furthermore, for the relatively far-field localization condition, the performance of the proposed method is worse than that of the TWLS method when
Conclusion
In this article, we propose an effective method to passively locate the signal source in the downtown area. By loading the sensors on the UAVs to establish the WSN in the air, the challenge of the source passive localization caused by multipath fading can be overcome. Meanwhile, the operating center is taken as a calibration source to refine the positions of the UAVs, and then the accurate position of the signal source is obtained according to the classical iterative algorithm, where the starting point is generated by the SDP technology. The simulation results demonstrate the effective performance of the proposed method. In the future work, we will analyze how the distance between the sensors will affect the localization accuracy under the optimal geometry configuration.
Footnotes
Handling Editor: Katsuya Suto
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (Grant Nos 61401323, 61631015, and 61471395) and the Fundamental Research Funds for the Central Universities (Grant Nos 7215433803 and XJS16063).