
Abstract
Sensor networks for infrastructure monitoring systems require battery-operated sensing nodes with a lifetime of 10 years, a standardized technology, and low engineering costs. Receiver-initiated transmission and coordinated sampled listening are promising power-saving communication methods that can be used for infrastructure monitoring. First, we compared receiver-initiated transmission and coordinated sampled listening from the viewpoint of power consumption and communication success probability. The results of the comparison showed that if we can continue coordinated sampled listening synchronous communication mode, we can satisfy the low power consumption performance required for infrastructure monitoring. However, coordinated sampled listening synchronous communication cannot be maintained for a longer period owing to performance variations of the clock crystal oscillator (CXO). We solved this problem by developing energy efficient system-media access control protocol (NES MAC), a MAC protocol with the additional function of correcting the dispersion of CXO and maintaining synchronization for a long time. NES-MAC is fully compatible with coordinated sampled listening. Furthermore, NES-MAC also has a high power-saving effect when communicating with normal coordinated sampled listening. Therefore, it is possible to expand the network easily and economically without affecting the power-saving performance. In addition, we found that through actual equipment evaluation that sensor nodes that adopt NES-MAC can operate for more than 10 years with two CR123A-type batteries.
Introduction
This article is an extension of work originally presented at the 2016 International Conference on Internet of Things and Applications (IOTA, 2016). 1
Research and development of wireless sensor networks have been actively conducted since the late 1990s. For example, a study by Chong and Kumar 2 was titled “Wireless micro sensor network is recognized as one of the most important technologies in the 21st century.” Wireless sensor networks have been renamed as smart networks and the Internet of Things for practical applications. Recently, applications that use the original features of sensor networks, such as long-term battery-powered sensing, have been developed.
Since the collapse of the Sasago Tunnel in 2012, 3 research and development in the field of infrastructure surveillance have increased in Japan. For example, each ministry and agency is focusing on “monitoring social infrastructure.”
Infrastructure monitoring systems are often located in areas where it is difficult for people to enter. Therefore, infrastructure monitoring systems are difficult to install and maintain. Sensor networks can sense over a long period of time using batteries. Using this feature, sensor network systems require less time for maintaining the power supply. Therefore, sensor network systems are easier to install and maintain as compared to the conventional systems. From the aforementioned discussions, we observe that infrastructure monitoring systems are expected to be a potential application of sensor network technology. Sensor networks for infrastructure monitoring require functions, such as “standard compliance,”“low engineering cost,” and “continuous operation for approximately 10 years,” in addition to the original characteristics of the sensor network:
Standardized technology. When considering global development of a developed infrastructure monitoring system, it is necessary to use world standard technology as much as possible for the technology used by the system.
Low engineering cost. In some cases, it might be necessary to add nodes to the system in order to change or extend the monitoring range while the system is in operation. In such a case, adding a node must be easy to perform, even by a non-specialist technician.
Continuous operation for approximately 10 years. The communication frequency that is required to monitor infrastructure is not generally high; it is approximately once per hour. For example, in the pump failure monitoring system developed in the Research and Development of Lifeline Core Monitoring System, 4 it is assumed that measurement is conducted approximately 200 times per week in several scenarios. In addition, the monitoring frequency of the water pipe leakage detection system is observed to be once every 6 h. 5 Instead of having a low frequency of measurements, the system must be substantially maintenance free. Specifically, “continuous operation for 5–10 years without battery replacement” is required because the maintenance of the nodes installed in the infrastructure is very expensive.
Receiver-initiated transmission (RIT) is an asynchronous communication method. In RIT, the receiving side notifies the reception timing by transmitting a beacon. Coordinated sampled listening (CSL) is a communication method that uses both asynchronous and synchronous communication. In CSL, the sender uses wakeup frames to announce the transmission timing before transmitting the data frame. These are standardized 6 power-saving wireless communication methods that appear to be promising for infrastructure monitoring. Conventionally, CSL synchronous communication cannot be performed due to the clock variations. Therefore, it is used only in an asynchronous communication mode with high overhead. However, if asynchronous communication is used, continuous operation for more than 10 years is difficult with reasonable battery size. CSL synchronous communication with little communication overhead is considered promising as a means of achieving continuous operation for more than 10 years. Normally, a general crystal clock oscillator (CXO) is used for time synchronization to implement CSL synchronous communication.
To perform CSL synchronous communication, it is necessary to maintain synchronization. Low power communication cannot be performed unless CSL synchronous communication can be maintained. A CXO can vary from 20 to 30 ppm as a result of the individual differences and temperature fluctuations. Therefore, to maintain CSL synchronous communication, communication must be performed once every 10–20 min. While measuring the data approximately 200 times a week, the average communication interval is 0.84 h. This indicates that the system has to communicate regardless of the application. This is a problem from the viewpoint of power-saving performance and system construction. To cope with this problem, it is necessary to deal with the clock drift.
In this article, we propose NES-MAC as a power-saving MAC stack with the characteristics required for infrastructure monitoring, and we design and implement it. The core idea of NES-MAC is to maintain synchronization by rectifying the clock drift based on the data obtained using CSL communication. NES-MAC has the following features:
Standards compliance. NES-MAC is fully compliant with IEEE 802.15.4g 7 and CSL. IEEE 802.15.4g is popularly used as a protocol for CSMA-based MAC. NES-MAC targets the infrastructure monitoring systems. However, NES-MAC is a standard compliant stack. Therefore, NES-MAC can demonstrate the expected performance regardless of the transmitted data. The contents of the communicated data may contain contents other than that obtained from infrastructure monitoring.
Low engineering cost. Nodes adopting NES-MAC demonstrate high power-saving performance as long as the destination node uses CSL. The destination node does not need to use NES-MAC. Since the system can be constructed by mixing NES-MAC and commercially available standard products, it is easy to procure and add nodes, and as a result, the engineering cost of the system can be kept low.
Continuous operation for approximately 10 years. NES-MAC has the correction function of CXO validation with software for synchronization at communication. If synchronization at communication is maintained, power-saving communication can be performed. Therefore, an application is required with low frequency of communication for which infrastructure monitoring can be maintained with power-saving communication using NES-MAC. While communication is occurring, NES-MAC can use the CSL synchronized communication mode, which has low overhead. With clock correction, NES-MAC is fully compliant with IEEE 802.15.4g and CSL, but it can remain functional for 5–10 years. Furthermore, in this article, we illustrate by performing an actual machine evaluation that it can be operated for more than 10 years using two CR123A-type batteries.
Related work and problems
Low power listening systems
Low power listening (LPL) is a technique that achieves long-term sensing with a battery. CSL is a kind of LPL. In LPL, the LPL receiver performs intermittently. The LPL sender performs power-saving communication by transmitting data according to the intermittent reception timing of the receiver.
The operation of CSL is depicted in Figure 1. The CSL sender contains two transmission modes: asynchronous and synchronous. When the sender does not know the intermittent receiving timing of the receiver, the sender transmits data in CSL asynchronous mode; however, when the timing is known, the data are transmitted in CSL synchronous mode. In either mode, the CSL sender sends wakeup frames before sending the data frame. However, if the CSL sender is in CSL asynchronous mode, the transmission period of the wakeup frames is longer than that observed in case of the CSL synchronous mode. In the wakeup frame, information regarding the data frame transmission timing (“how many seconds later the data frame is transmitted”) is included. When the wakeup frame is received during intermittent reception, the receiver calculates the data frame transmission timing from the information in the wakeup frame and waits to receive the data frame. Upon completing the reception of the data frame, the receiver transmits its own intermittent reception timing information. More specifically, this information is “Own discontinuous reception cycle” and “Data frame transmission timing information within the wakeup frame received at the time of intermittent reception.”
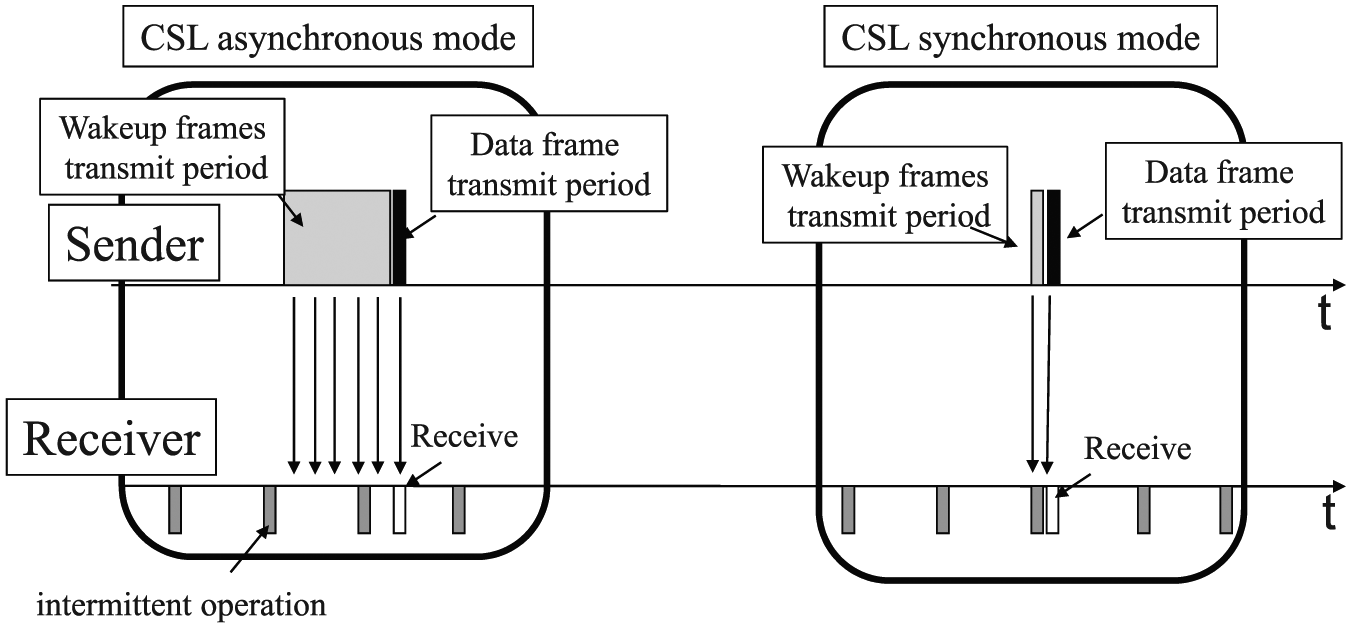
CSL operation: The wakeup frame’s transmitting duration is shortened by the receiver wakeup timing information.
Normally, the wakeup frame’s continuous transmission period during CSL asynchronous mode is set to at least the intermittent reception interval (approximately 1–3 s). This value is sufficiently larger than the period required for data frame transmission (usually 10 ms or less). Therefore, achieving “long-term battery-powered sensing” requires reducing the frequency of communication in CSL asynchronous mode as much as possible. When the transmitting side knows the receiving side’s intermittent receiving timing information, the communication is performed in CSL synchronous mode. Similar to CSL asynchronous mode, CSL synchronous mode also continuously transmits a wakeup frame before transmitting a data frame. However, the wakeup frame transmission period during CSL synchronous mode is shorter than that during CSL asynchronous mode. For example, in the implementation of NES-MAC, the wakeup frame transmission period during CSL synchronous mode is approximately 20 ms. Even when the CSL synchronous mode is completed, the receiving side transmits its own discontinuous reception timing to the transmitting side. When data frame transmission fails during CSL synchronous mode, the transmitting side erases the discontinuous reception timing information on the receiving side, and the next communication uses CSL asynchronous mode.
LPL method focused on CXO errors
If the accuracy of the time synchronization clock for transmission and reception is high and there is no error, once the transmitter and receiver in CSL asynchronous mode acquire the intermittent reception timing information, the CSL synchronous mode communication never fails. However, we typically use CXO with low precision (20–30 ppm) for the time synchronization clock of a node used in the sensor network. Therefore, when the communication interval becomes several tens of minutes or more, CSL synchronous mode communication fails. As a result, the communication mode shifts to the CSL asynchronous mode, which increases the communication overhead.
Research on the LPL protocol focusing on clock errors can be divided roughly into “Expected error correction” and “Actual measurement error correction.”“Expected error correction” performs clock correction based on the CXO specification. Meanwhile, “Actual measurement error correction” measures the error at the time of communication and performs clock correction.
WiseMAC
8
is widely known as an “anticipated error correction” method. WiseMAC calculates the transmission period (actually, the transmission period of the preamble) of the wakeup signal before transmitting the data frame by using the data transmission interval and the catalog specification regarding the clock drift. WiseMAC has a longer wakeup signal transmission period as the data transmission interval becomes longer. This is a problem in terms of system operation, since the overhead at frame transmission increases. According to WiseMAC,
8
the overhead can be depicted using equation (1).

For example, we assume that
“Measurement error correction” methods include rapid time synchronization (RATS), 9 predictive-wakeup MAC (PW-MAC), 10 and the method of Stanislowski et al., 11 which is used for OpenWSN. 12 RATS and PW-MAC are methods for correcting errors through beacon transmission. These methods require the frequent transmission of beacons. However, the frequent transmission of frames other than for application requirements is a problem from the viewpoint of power-saving performance and system construction. The method of David et al. involves correcting clock error in order to match the time slot of time-division multiple access.
High precision clock
Changing the hardware clock from low-precision CXO to highly accurate TCXO (CXO with a temperature correction circuit: accuracy ppm) or OCXO (CXO with a constant temperature chamber: 0.1 ppm or less) increases synchronization accuracy.
Table 1 summarizes the size and performance of common hardware clocks. Table 1 indicates that the operating current of TCXO or OCXO (mA order) is much larger than that of CXO (μA order). In infrastructure monitoring systems, we need to operate the node continuously for 10 years with batteries. In this case, the average operating current of the radio must be in the order of μA. Therefore, TCXO and OCXO cannot be used for infrastructure monitoring systems. WirelessHART 13 achieves high synchronization accuracy using low-precision CXO by measuring clock correction information items one by one at the time of node manufacture and writing it on the node. However, this method must acquire correction information for node manufacture, and this is a problem in terms of cost. In addition, from the viewpoint of system design, there is a problem of incompatibility with nodes of other methods.
Comparison of the hardware clock characteristics.

Standardized power-saving wireless communication method
RIT is a standardized power-saving wireless communication method different from CSL that is defined in IEEE 802.15.4e. RIT is a communication method in which the receiving side transmits its own receiving timing to its surroundings using a beacon, and the transmitting side transmits the frame according to the timing. An outline of RIT operation is shown in Figure 2.

RIT operation.
CSL transmits the wakeup frame continuously before transmitting the data frame. In contrast, in RIT, the sending side waits for beacon reception before transmitting the data frame. After receiving the beacon of the transmission destination node, the transmission side transmits the data frame. According to Fujiwara and colleagues,14,15 RIT is superior to the CSL asynchronous mode in that it does not increase the radio wave occupation time even when the communication frequencies between terminals are high. In addition, RIT is not affected by variations in CXO, because RIT is an asynchronous communication method.
Because the infrastructure monitoring application has low frequency of communication, communication using CSL is in the CSL asynchronous mode. Fujiwara et al. compare the CSL asynchronous mode and RIT from the viewpoint of power consumption and the communication link establishment success rate. The comparison reveals that RIT is superior to the CSL asynchronous mode from the viewpoint of power consumption and communication link establishment success rate at the communication frequency (approximately once per hour) of the infrastructure monitoring application. However, Fujiwara et al. offer no comparison between the CSL synchronous mode and RIT. Consequently, we compare RIT, the CSL asynchronous mode, and the CSL synchronous mode by theoretical calculation in order to clarify which among CSL and RIT is better for infrastructure monitoring.
The operating conditions of RIT and CSL are shown in Figure 3 and Table 2. The results of comparing RIT and CSL asynchronous mode and CSL synchronous mode from the viewpoint of power consumption and communication link establishment success rate are shown in Figures 4 and 5.

RIT and CSL operation.
Parameters for the comparison calculation regarding RIT versus CSL.
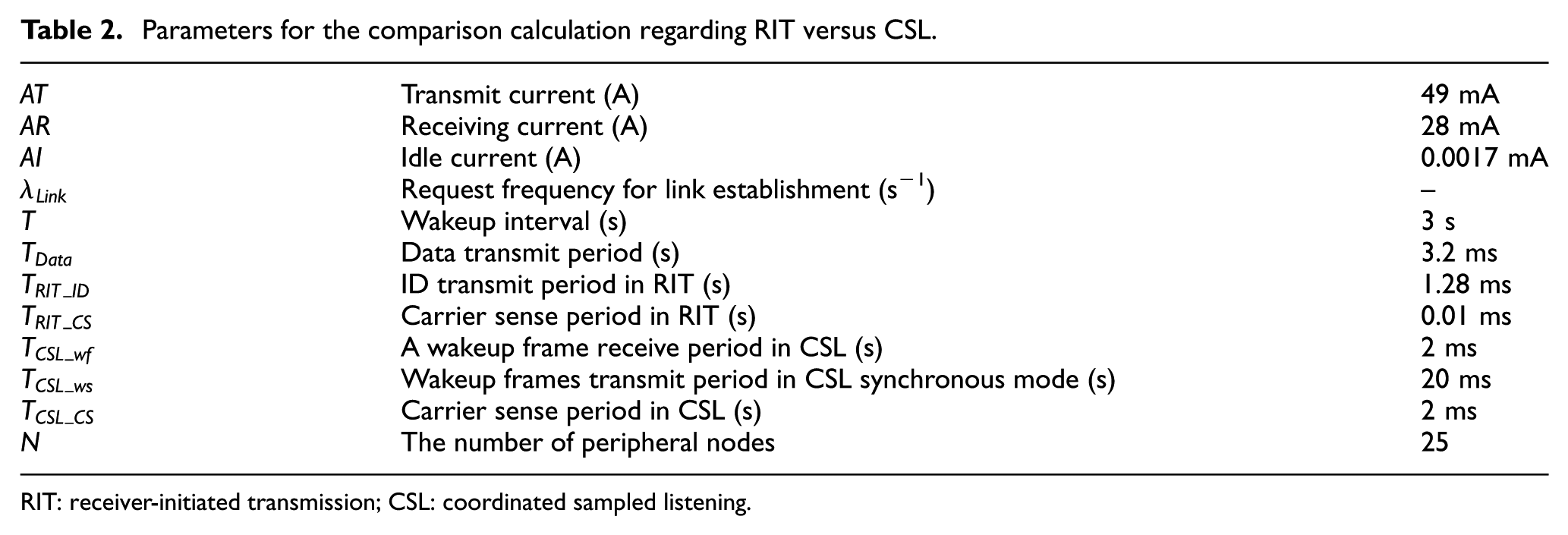
RIT: receiver-initiated transmission; CSL: coordinated sampled listening.

Plot of the number of communications per week versus the battery capacity for 10 years: Only the CSL synchronous mode can operate for 10 years with the target battery.

Comparison of the communication success rate: When the communication frequency is less than once every 15 s, the CSL sync mode provides the best communication success rate.
The calculation model for comparison used the method of Fujiwara and colleagues.14,15 In Tables 2 and 3, the parameters related to RIT are obtained from Fujiwara et al. The parameters related to CSL, the values at the time, and the current consumption are obtained from the implemented values of OKI MH-920-Node-232. 16 In addition, the number of peripheral nodes N used in the calculation of the communication link establishment success rate did not use the value 100 used in Fujiwara et al. Instead, it was calculated as 25 units in accordance with the system environment at the time of monitoring the infrastructure, as raised in the report of Samarasinghe et al. 17
Operations ratio regarding communications per unit time in each method.

RIT: receiver-initiated transmission; CSL: coordinated sampled listening.
Comparison of power consumption by theoretical calculation
Equations (2)–(4) show the discharge capacity required to operate a node having the performance shown in Tables 2 and 3 for 1 h using RIT, the CSL asynchronous mode, and the CSL synchronous mode (they are



The operation ratios of each mode, including the transmission, reception, and idle modes for RIT or CSL, are shown in equations (5)–(12)









From equations (2)–(13), Figure 4 compares the battery capacity required to operate RIT, the CSL asynchronous mode, and the CSL synchronous mode for 10 years. The vertical axis represents the battery capacity required for continuous operation for 10 years, and the horizontal axis represents the number of communications per week.
The system requirement of the Utility Infrastructure Core Monitoring System (UCoMS) 4 is “frame communication once per hour.” For example, when this request is executed, approximately 200 frames are sent per week. The battery capacity required for continuous operation for 10 years when transmitting 200 frames per week can be calculated from equations (2) to (13) and Tables 2 and 3. The calculation reveals that the CSL asynchronous mode requires 6051 mAh, RIT requires 3015 mAh, and the CSL synchronous mode requires 1821 mAh. From this calculation result, we see that when RIT and the CSL asynchronous mode are used, we cannot operate continuously for 10 years with the battery capacity assumed by UCoMS (2800 mAh). However, if synchronization can be maintained and the CSL synchronized mode is possible, we can infer that it can operate continuously for 10 years with the assumed battery capacity.
Theoretical comparison of communication link establishment success rates
The probability that the communication of each method does not collide was derived based on the theoretical formula of the communication link establishment success rate when using the Pure Aloha method.
18
The derivation formulas are depicted using Table 4 and the following expressions. The communication link establishment request follows a Poisson distribution.



Experimental conditions.

CSL: coordinated sampled listening.
For
According to Figure 5, when the communication link establishment request
Proposed NES-MAC method
Operation of NES-MAC
When CSL node first transmits a frame to a communication partner, the communication mode is the CSL asynchronous mode. When synchronization with the partner is established, subsequent communication is performed in the CSL synchronous mode. If communication in the CSL synchronous mode fails, the source node judges that the synchronization is out and executes the subsequent communication in the CSL asynchronous mode (the upper portion of Figure 6).
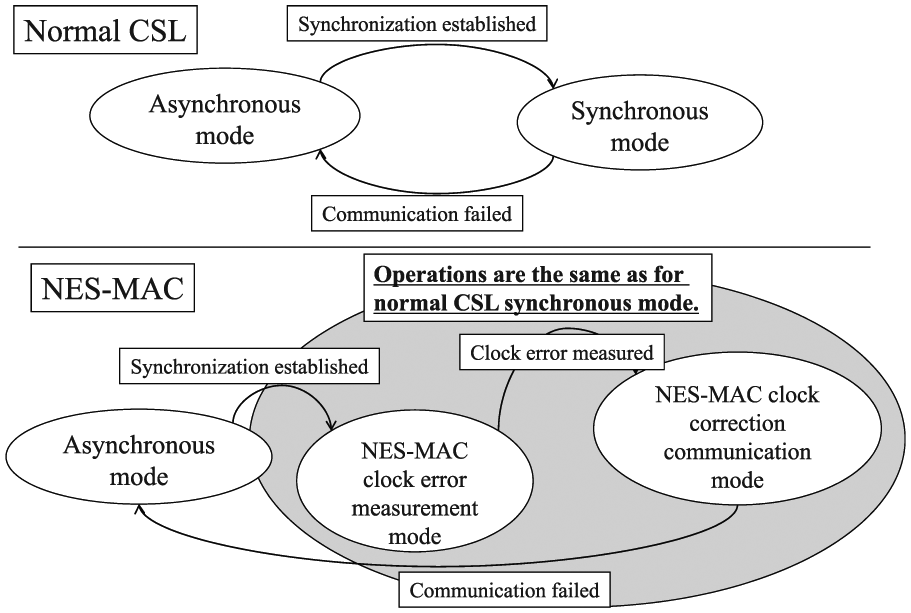
State transition diagrams of the normal CSL and NES-MAC.
When synchronization with the transmission destination is not established, the node using NES-MAC performs communication in the CSL asynchronous mode. When the communication fails, it returns to the CSL asynchronous mode. These points regarding NES-MAC are the same as that for CSL. When synchronization with the transmission destination is established, clock correction communication is performed. Specifically, the clock error is calculated from the synchronization information from the transmission destination node and the data transmission interval. Once the clock error is calculated, the communication is performed in the clock-corrected synchronous mode. The clock-corrected synchronous mode is the CSL synchronous mode that performs clock correction for each communication (the lower portion of Figure 6).
The clock correction method of NES-MAC is the “matching the source to the destination clock” method. Therefore, even if the communication destination is using conventional CSL rather than NES-MAC, there is still a power-saving effect.
Clock error calculation method
NES-MAC calculates clock errors during clock correction mode. A calculation method of the clock error will be described with reference to Figures 7 and 8. Figure 7 shows the communication sequence in clock correction mode. Figure 8 depicts the pseudocode for NES-MAC.

Sequence of clock error measurement and correction.

Pseudocode of NES-MAC.
The sequence of clock error measurements and the correction method of NES-MAC will be described with reference to Figures 7 and 8. As depicted in “Low power listening systems,” the LPL (CSL and NES-MAC) can detect the wakeup reception timing of the receiving side during the transmission of the data frame.
After transmitting data in CSL asynchronous mode (Figure 8(1)), NES-MAC alters the state to NES-MAC clock error measurement mode. The NES-MAC always calculates the wakeup duration of the receiving side based on the wakeup reception timing and the wakeup interval measured in Figure 8(1) and (2). When there is a request from the upper layer to the NES-MAC, the NES-MAC communicates in a CSL synchronous mode at the calculated wakeup timing of the receiving side. The NES-MAC calculates the difference between the wakeup timings that were acquired as a result of the CSL synchronous communication and its self-calculated wakeup timing (Figure 8(3)). The NES-MAC calculates the clock error between transmission and reception (Figure 8(4)) based on the timing difference that was calculated in Figure 8(3). Furthermore, the NES-MAC transitions to the NES-MAC clock correction communication mode. When there is a request from the upper layer, the NES-MAC calculates the wakeup timing. Furthermore, the NES-MAC rectifies the wakeup timing (Figure 8(5)) using the clock error calculated in Figure 8(4). Finally, data transmission is conducted (Figure 8(6)).
In normal CSL, as the data transmission interval becomes longer, the synchronization deviation due to the clock error becomes longer than the wakeup frame communication period, and the communication fails. As a result, the CSL synchronization mode cannot be continued if the data transmission interval becomes longer in normal CSL. However, in NES-MAC, as described above, the frame transmission start time is corrected. Therefore, even when the data transmission interval becomes long, NES-MAC succeeds in data communication and can continue in the CSL synchronous mode.
Evaluation
Comparison with conventional technology
WiseMAC and NES-MAC have following similar characteristics. They are CSMA-based MAC, have LPL-based power-saving function, and consider the clock error. Therefore, WiseMAC and NES-MAC are compared from the viewpoint of power consumption.
The result of the comparison of WiseMAC and NES-MAC from the viewpoint of the overhead of frame transmission is illustrated in Figure 9. The vertical axis depicts the length of the overhead per frame, whereas the horizontal axis is the data communication interval. In case of WiseMAC, the overhead is the preamble transmission period. The overhead can be calculated using equation (1). In case of NES-MAC, the overhead is the wakeup frames’ transmission period in the CSL synchronous mode. In Figure 9, the wakeup interval is 3 s, and the wakeup frames’ transmission period in the CSL synchronous mode is 20 ms. These values are presented in Table 2. The clock error of CXO is 30 ppm.

The comparison of the overheads of WiseMAC and NES-MAC. The overhead of NES-MAC remains constant. However, the overhead of WiseMAC increases as the communication interval increases.
From Figure 9, it can be observed that, in NES-MAC, even if the data communication interval expands, the overhead does not change. However, in WiseMAC, if the data communication interval expands, the overhead becomes large. In our UCoMS application, we assume that there are approximately 200 communications per week. In this case, the average communication interval is approximately 0.84 h, and the overhead of the Wise MAC is 360 ms.
Using the values that are obtained from equations (4) and (8)–(10) and Table 2, the battery capacity was calculated when the communication interval was 0.84 h. While using NES-MAC, the battery capacity that was required for continuous operation for a period of upto 10 years is 1821 mAh. However, the capacity required for WiseMAC is 2330 mAh. The capacity for WiseMAC is more than that of NES-MAC by 30%, which is a significant difference.
In addition, WiseMAC does not work unless the clock drift information of the destination hardware clock is known in advance. If the receiver’s clock drift is worse than expected, the synchronization fails and no power-saving effect is achieved. Conversely, NES-MAC measures the clock drift during communication. Therefore, even if there is no clock drift information on the receiving side, synchronization can be maintained and a power-saving effect can be achieved. Therefore, NES-MAC provides better performance than that of WiseMAC.
Evaluation by implementation
Experimental environment
We implemented and evaluated the proposed method on OKI MH-920-Node-232. 16 MH-920-Node-232 is a sensor node supporting IEEE 802.15.4g equipped with Coretex-M3, a 32-bit microcomputer. For software development, FreeRTOS 19 was adopted as the embedded OS, and C was adopted as the development language. Other experimental conditions are shown in Table 4.
The number of program steps to obtain normal CSL was approximately 900. To implement NES-MAC, a program of approximately 30 steps was added. The difference between these programs is observed to be approximately 3%. Therefore, from the viewpoint of program complexity, there is no significant difference between normal CSL and NES-MAC.
In IEEE802.15.4, the sender inserts a random delay before data transmission. Furthermore, it requires carrier sense for a certain period of time in order to transmit data. The random delay before the data transmission is called “IEEE802.15.4 random backoff.”
The purpose of IEEE 802.15.4 random backoff is to reduce the collision probability of the flooding. This is different from the purpose of IEEE 802.11 random backoff.
Flooding is rarely used in the infrastructure monitoring application because of its high power consumption. Therefore, we set the random backoff to 0 s in the experiment. Because of this setting, the sender only takes carrier sense just before transmitting data. This setting makes it easy to calculate the accuracy of synchronization.
Experimental results
The experiment was conducted by operating two sensor nodes via the serial port. A photograph taken at the time of the experiment is shown in Figure 10. In the measurement of transmission and reception timing, general-purpose input/output signals were extracted from each node and observed through an oscilloscope. 1 Figure 10 shows the results when communicating by setting the data transmission interval to be sufficiently longer than the application request (request for UCoMS 4 is 1 h) using normal CSL and NES-MAC. The upper portion of Figure 10 shows logs of normal CSL, and the lower portion shows logs of NES-MAC. According to these logs, if the communication interval is longer than 40 min in normal CSL, communication fails. However, in NES-MAC, the communication can be continued even if the communication interval is open for 24 h.

Log for comparing the communication result in the case of a long communication interval.
To clarify the performance improvement brought about by the use of NES-MAC, we randomly selected 10 pairs (A–J) of nodes from approximately 100 nodes and measured the synchronous maintenance performance. Figure 11 shows the results. The measurement was conducted in a room with almost no temperature change (approximately 28 ± 1°C). In the case of normal CSL, the data communication interval during which the synchronous mode can be maintained varies from approximately 20 min to approximately 3 h, depending on the combination of nodes. In contrast, in the case of NES-MAC, it can be confirmed that the synchronous mode can be maintained even when the data communication interval is 3 h or more in all combinations.

Comparison regarding the ability to maintain synchronization of CSL and NES-MAC: NES-MAC nodes can be synchronized even if the communication interval is 3 h.
The clock characteristics of CXO change with temperature. A communication experiment with a large temperature change was conducted to clarify the tolerance of NES-MAC to temperature changes. The results are shown in Figure 12. In Figure 12, the horizontal axis represents the number of instances of communication, and the vertical axis represents the temperature during communication. The experimental system was installed on a window with a large temperature change, and communication was performed for 60 h every other hour using NES-MAC. The communication interval of 1 h was set from the required specification of UCoMS. 4 In this experiment, we used a combination of nodes that cannot maintain the CSL synchronous mode when the data transmission interval becomes 20 min or longer using normal CSL. The temperature during communication was measured using the temperature measurement function of the microcomputer.
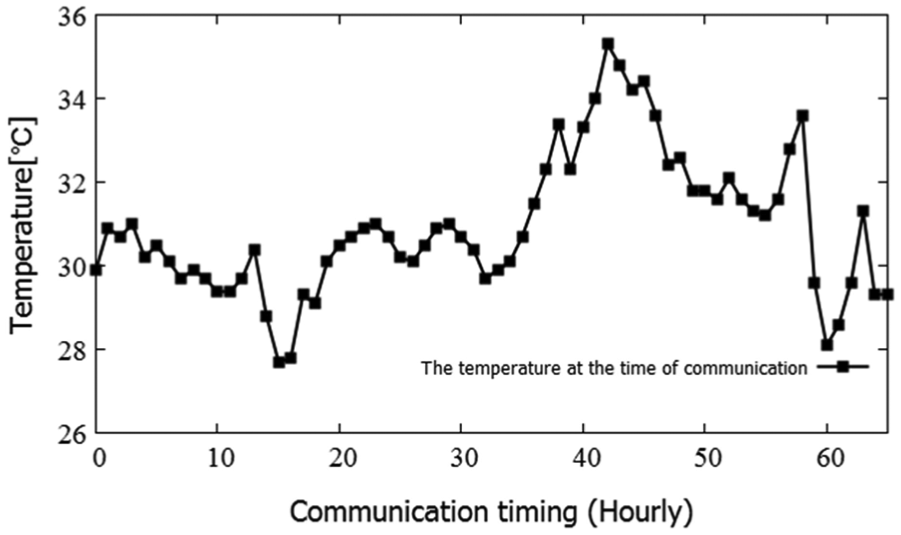
Communication performance of the NES-MAC outdoors: Because NES-MAC is used, the communication is successful every time. Synchronization can be maintained even if the temperature changes by up to 4°C per hour.
In the experiment, CSL synchronous communication was performed once every hour, and synchronization was maintained in all communications. During the measurement period, there was a maximum temperature change of 4° per hour, but the CSL synchronization mode was maintained without problems.
Consideration of experiment result
The result of the demonstration experiment showed that the hypothesis posed in section “Comparison of power consumption by theoretical calculation” is realistic. With NES-MAC, CSL synchronous communication can be maintained even if the communication interval is opened, enabling continuous operation to be performed for a long time using batteries of the same capacity. Depending on the application, the data communication interval might not be constant. Using NES-MAC, the CSL synchronous mode can be maintained even if the frame transmission interval temporarily becomes 10 min or more.
As shown in Figure 4, when the CSL asynchronous mode or RIT is used, as the number of communications increases, the battery capacity required for 10 years of operation increases greatly. However, if the CSL synchronous mode can be used with NES-MAC, even if the communication frequency is approximately 600 times/week, the battery capacity necessary for 10 years of operation will be at most 1900 mAh. When NES-MAC is used, the necessary battery capacity does not change much, even if the number of communications increases, because the power consumption required when frame transmission using the CSL synchronous mode is performed at the assumed frequency is sufficiently low compared with other power consumption (intermittent reception, sleep). For example, communicating approximately 600 times per week with the CSL synchronous mode requires a battery capacity of 99 mAh for frame transmission for 10 years. This is approximately 5% of the 1895 mAh battery capacity required to operate for 10 years.
Consequently, we can say that the communication frequency change of several orders of magnitude brought about by using NES-MAC is sufficient to be acceptable from the viewpoint of battery capacity.
Higher tolerance for change in communication frequency can reduce engineering cost because it facilitates system design and construction.
The experiment of Figure 11 reveals that NES-MAC can maintain the CSL synchronous mode even if the data communication interval is 3 h (the number of communications per week: 56) in the indoor environment with almost no temperature change (temperature change per hour is less than ±1°). This does not depend on the combination of nodes. The results show that NES-MAC operates effectively in an indoor-oriented infrastructure monitoring system such as UCoMS. 4
The experiment of Figure 12 reveals that NES-MAC can maintain the CSL synchronous mode even if the data communication interval is 1 h in the outdoors with a large temperature change (approximately ±4° at the maximum). In the current implementation of NES-MAC, the transmission period of the wakeup frame during CSL synchronous communication is 20 ms. Therefore, when the clock error change of 1 h becomes 10 ms, synchronization is out. In other words, if the clock error per hour changes by 10 ms/1 h= approximately 2.8 ppm, NES-MAC will not maintain the CSL synchronous mode.
The CXO is built into the node. The clock drift of the CXO varies with temperature. The amount of change in the clock drift varies with temperature. In addition, the tendency of the clock drift is different for individual CXOs. Figure 13 depicts the relation between the maximum clock drift change of an individual CXO and the temperature. This figure was calculated from the data sheet of CXO (RiverEletech TFX-03) used by MH-920-Node-232.

Temperature dependence of the maximum clock drift value between CXOs built in two different nodes: The clock error while changing the temperature by 5°C depends on the temperature at that time. Clock error varies by 13 ppm at around 5°C, but it changes only by 5 ppm at around 25°C.
The maximum error due to temperature change between CXOs depends on the temperature. For example, in the vicinity of 25°C, the maximum error is approximately 5 ppm even if the temperature changes by 5°C. In contrast, in the vicinity of 5°C, the maximum error reaches 13 ppm when the temperature changes by 5°. Current NES-MAC is implemented assuming indoor use. 4 When using NES-MAC outdoors, we must increase the wakeup frame transmission period in CSL synchronous mode to cope with the temperature change of the usage environment. For example, if the temperature change in the usage environment of NES-MAC is 0°C–40°C, and the amount of change in temperature per hour is 5° at the maximum, we can say that the amount of change in the clock error is 13 ppm from Figure 13. Thus, if there is a temperature change of 5° after time synchronization, it can be calculated that the clock error change per hour becomes a maximum of 46.8 ms. In this case, if the wakeup transmission period in the CSL synchronous mode of NES-MAC is set to 46.8 × 2 = 93.6 ms, it is considered that synchronization will not be lost. Therefore, NES-MAC can also be used outdoors for monitoring infrastructure through appropriate setting changes.
Conclusion
In this article, we proposed and implemented NES-MAC, a CSL compliant MAC protocol for an infrastructure monitoring system requiring continuous operation over a long term, and we verified its effectiveness. First, we clarified the requirements for infrastructure monitoring systems. Next, CSL and RIT, standardized power-saving wireless communication methods, were discussed from the viewpoint of power consumption and communication link success probability derived from the required specifications. The result revealed that if the CSL synchronous mode can be maintained even when the data communication interval exceeds 1 h, it satisfies the required specifications. To maintain CSL synchronous mode, we developed NES-MAC with a clock correction function. We confirmed that NES-MAC can maintain synchronization even if the data communication intervals are three times longer than the frame transmission interval (approximately hour) required for indoor infrastructure monitoring. Moreover, we showed that extending the wakeup frame transmission period of the CSL synchronous mode to about five times enables NES-MAC to be used for outdoor infrastructure monitoring applications where the temperature change is intense. These experimental results revealed that when NES-MAC is used, continuous operation for approximately 10 years is possible with two CR123A-type batteries. From the above, it can be concluded that the synchronous CSL method implemented with NES-MAC is the most promising method, satisfying the three requirements of infrastructure monitoring.
Footnotes
Acknowledgements
This work has been conducted as one of the research items under the New Energy and Industrial Technology Development Organization (NEDO) project “Development of Utility Infrastructure Core Monitoring Systems (UCoMS).”
Handling Editor: Giovanni Pau
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.