
Abstract
Wireless sensor networks have made great progress in recent years in every aspect of our life. To extend their range of application and provide a further effective option for remote surveillance, unmanned aerial vehicles have been gradually introduced into sensor networks, due to their advantages of flexibility, mobility, and ease of realization. Despite the success of various applications and studies in this new field, unmanned aerial vehicle–wireless sensor network still faces many open challenges, such as the unmanned aerial vehicle capable system framework, land-wireless sensor network management, and unmanned aerial vehicle mission planning strategies. In the article, we propose a cooperative framework for unmanned aerial vehicle–wireless sensor network, which is composed of sensor nodes, fixed-group leaders, and a unmanned aerial vehicle-Sink, in which a three-layer hierarchical network is formed. A land-wireless sensor network k-means driven grouping approach is then presented, which considers the communication performance, the position, and other factors. Additionally, a simulated annealing algorithm is employed to detect the optimal flight trajectory according the ground wireless sensor network architecture. Finally, the proposed approach is compared to other related approaches, and the results have shown better performance of our proposal in terms of energy consumption, flying time, and other relevant evaluation criteria.
Introduction
With the increasing development of the fields of computation science, wireless communication, sensors, and other technologies, wireless sensor networks (WSNs) are increasingly being utilized to meet emerging needs.1–3 Compared to traditional senor networks (wired sensor networks), WSNs have many advantages in terms of deployment and maintenance. WSNs have permeated every corner of life and have become a main type of infrastructure in smart cities, industries, agriculture, and living.4–6 Due to their superiority and significance, WSNs have also been applied in different domains, due to advantages of being low-cost and flexible without requiring cables. In particular, WSNs are playing an increasing role in environmental monitoring to observe environmental parameters such as noise, pollution, temperature, forest fires, and many more.7–9 In recent decades, wireless sensor networks have undergone sufficient development, especially in terms of energy conservation and increasing the communication quality, data storage, and data processing capabilities. This has prompted progress of the Internet of Things, Cloud Computing, and Big Data.
However, WSNs still face many challenges such as the extensive deployment range required, limited storage, and energy requirements.10,11 In a typical WSN, the physical infrastructure consists of a large number of wireless nodes, which are equipped with a battery, storage, a microprocessor, and a Radio Frequency (RF) transceiver. In addition to the challenges described above for current WSNs, especially for monitoring applications, there are a further two aspects that need to be studied. First, a WSN only consists of position-fixed nodes. Although this framework has the advantage of being low-cost and energy economical, the overall system lacks mobility and agility. Furthermore, fixed-node WSNs have limited applicability and scalability. For large areas of environmental surveillance, there are contradictions between the limitation of monitoring scope of traditional WSNs and the increasing range of monitoring areas. Second, in WSN deployment environments, different obstacles may exist, such as buildings, trees, machines, walls, and even human bodies. In some more complicated environments, this causes deep fading and heavy reflections from objects or obstructions of wireless signals. Therefore, these obstacles can have a great impact on the wireless signal and the quality of communication during wireless propagation.
To address these two problems above, many studies have introduced land mobile vehicles or robots into WSNs, a mobile robot can serve as a sink node, a base station, and a relay node. In these mobile platforms, unmanned aerial vehicles (UAVs) are the most impressive12,13 and have been widely applied in environmental monitoring, agriculture, and aerial photography. The most significant advantages are flexibility, safety, and ease of realization. In many studies, researchers have used UAV to extend the monitoring range and improve the quality of the overall network, including the length of its working life and the number of live nodes. However, there is still an open problem in determining how the flight path should be planned while taking the performance of land networks into consideration. An urgent need has arisen to resolve this problem for UAV-WSNs. Efficient architectural design of WSNs for UAV data collection systems has gradually become a hot topic and is also the objective of our study. Therefore, UAV-WSNs still face these challenges and are summarized as follows: (1) How can an effective group-land WSN consider communication quality? (2) How should the UAV fly to optimally gather WSN data.
In this article, we propose a UAV data collection system, a weighted k-means cluster grouping WSN algorithm, and a new flight path method based on a simulated annealing (SA) algorithm for UAV-WSNs that addresses all of the aforementioned problems. In summary, the contributions of this article are listed as follows:
We developed a new architecture for UAV-WSNs, using a k-means clustering algorithm, based on position, communication quality with neighbors, received signal strength indication (RSSI) and other parameters of the group sensor nodes. The sensor nodes are divided into different groups according to identified correlations, enabling discovery of the centers (group leaders) of these groups.
Then, the fixed-group cluster leader WSN is build and the fixed-group cluster leader is placed at the center of these groups to collect data and to manage the sub-network.
The performance of our proposal is evaluated via simulation. The results show that this algorithm achieves the mentioned objectives and outperforms current solutions, in terms of lifetime, flying time, and other measurement indexes.
The article is organized as follows: section “Related work” describes related work on UAV-WSNs, current challenges, and our contributions. In section “Outline of UAV-WSN,” an efficient architecture for data aggregation is presented, based on UAV and WSN. The problem description, mathematical model, and algorithm using k-means and SA are presented in section “WKMC-SA algorithm.” Section “Simulation results and implementation” discusses the simulation results by comparing our method with other approaches. Finally, we conclude our article in section “Conclusion.”
Related work
The framework for WSN has been studied for decades under different constraints. Depending on different applications and stages, the utilized objective and optimization methods were different. There are two classical network topologies for WSN: flat and hierarchical models. 14 At the start of WSN usage, a major proportion of applications used the flat model. In a flat network, all nodes have the same functions, status, and hardware. For this structure, various communication protocols and algorithms have been proposed. However, this is harmful to network management. In addition, near base-station nodes can easily consume more energy to relay communications to other nodes, resulting in an early dead node. It is obvious that this reduces network life of the whole system. In a hierarchical network, the nodes are divided into ordinary nodes, a group head, a sink node, and other nodes, according to function and each plays different roles for collecting and transmitting data. 15 As WSNs are researched in more depth, heterogeneous networks have evolved from hierarchical WSNs. Elhoseny et al. 16 proposed a method based on the genetic algorithm that optimizes heterogeneous sensor node clustering. Five state-of-the-art methods were then compared and the results showed that this approach greatly extends the network life. Barati et al. 17 presented an Energy Aware Clustering Hierarchy Protocol to reduce the communication overhead. A multi-level hierarchical structure was created to adequately route and collect data in WSNs. Finally, simulation results showed that the proposed protocol consumes less energy during use. However, these studies focus only on WSNs, without considering the performance of UAV. Moreover, for monitoring systems, these approaches do not consider the position, terrain, and quality of the wireless communication during the design, although the above factors must be regarded for UAV-WSNs. Sasikumar and Khara 18 implemented both centralized and distributed k-means clustering algorithms in the network. This is a good method for clustering WSN; however, the article only considered distance.
With increasing progress of UAV and WSNs, many studies exist for UAV-WSNs. The research can be broadly classified into applications and optimal algorithms. Within the first class, UAV-WSN has been applied in different domains, such as agriculture, 19 data collection of greenhouse gas, 20 animal monitoring, 21 and healthcare. 22 To obtain a high-quality overall system, Jawhar et al. 23 and Mianxiong et al. 24 studied specific applications and proposed a new architecture for UAV-WSN. However, they focus on specific WSN types and do not consider land network systems and UAVs. Within the second class, the work by Dutta et al. 25 , Maximilian et al. 26 , and Ho and Shigeru 27 still led to energy conservation of the overall system, adopting different methods to optimize the UAV-WSN in routing, MAC, and transporting protocols. From the view of UAV, path planning, flying control, and other problems were found in numerous studies.28–30 These studies have promoted the research and application of UAV-WSN. However, the approaches that we have mentioned only consider the condition or challenge from a single perspective (either WSN or UAV) and do not regard the land network and air robots as an overall system. This significantly restricts their application for many remote large-scale monitoring applications. In summary, most of these approaches cannot achieve all the design objectives of UAV-WSN for environmental monitoring. Although Ho et al. 31 use Particle Swarm Optimization (PSO) to reduce the energy consumption, Bit Error Rate (BER), and UAV travel time, the Land WSN has to be repeated to select the cluster head during a period or across multiple time slots. In addition, the UAV effort required re-computing of the flight path due to changes in network topology caused by changes of the cluster heads. This method is based on ideal assumptions, which are not realistic in practice, and more work needs to be completed before data can be collected in advance.
Outline of UAV-WSN
In this section, we present the architecture of UAV-WSN and outline our approach. First, a classical topology of hierarchical WSN is presented. Then, we provide an overview of our algorithm.
Hierarchical WSN
In this article, we focus on hierarchical UAV-WSNs. Figure 1 shows the topology of a hierarchical UAV-WSN. The overall monitoring system contains a UAV-Sink node, sensor nodes, and group leaders. Different colors of sensor node and group leader represent different clusters. Additionally, the group leaders are equipped with a solar charging system to cope with the large energy consumption of WSN group leaders.

Topology of a hierarchical UAV-WSN.
A hierarchical WSN consists of many groups. In each group, the group leader and the sensor nodes comprise a subsystem. In a classical WSN, the group leader is periodically elected, according to a probability algorithm, remaining energy, communication quality, or other factors. To reduce the process of group leader election and the corresponding energy consumption, our method adopts a fixed-group leader with more energy (a large capacity battery) or a charging unit (solar or wind). The fixed-group leaders are then placed in the WSN monitoring domain based on a set of rules. The sensor nodes transmit their sensing data to the leaders. Finally, either the UAV acts as a sink node or a base station flies over these leaders to complete data collection.
Outline of k-means clustered UAV-WSN
The operation of our approach can mainly be divided into three phases, as shown in Figure 2. The following steps can describe the working process of this approach: broadcasting, clustering, placing group leaders, planning the flight trajectory, and collecting WSN data. Our proposal is aimed at light traffic WSNs such as environmental monitoring, agricultural application, and greenhouse reports. In these applications, temporal–spatial correlation and other data fusion techniques can be employed to eliminate and to compress the aggregated information in group leaders.

Overview of our proposed algorithm.
In the first phase (initialization), the sensor nodes transmit their tentative wireless signals (TS) by broadcasting multiple times to all neighbors. Furthermore, the sensor nodes listen to the TS of their neighbors to obtain communication quality measures (such as RSSI, packet loss rate (PLR), and others). Then, the sensor nodes are divided into multiple correlation groups by weighted k-means clustering according to their link qualities, neighbors, and positions. The details of this process can be found in section “WKMC-SA algorithm.” After grouping, each group leader is placed into these groups by computing the best position such as the centroid.
In the second phase, the server or land station computes the flying trajectory for the UAV-Sink, using an intelligent algorithm after obtaining the position of group leaders and their geographical coordinates. For this computation, multiple factors must be considered, including the flying time and distance. This computation process is shown in section “WKMC-SA algorithm.” When a group leader collects all sensor data from the group members, the UAV-Sink takes off and flies according to planned trajectories to collect the complete set of sensor data. Finally, the UAV-Sink returns and transmits the data to a land station for the next cycle.
WKMC-SA algorithm
In this section, we present the problem statement of our approach, using a mathematical model. First, the specificity of the presented framework of the land-WSN and UAV-Sink node and energy consumption is analyzed. Then, the mathematical model is given based on the weighted k-means group algorithm. Finally, to reduce the flight time of the UAV, a SA algorithm is used for flight planning.
Energy of the land-WSN and UAV flight
It is known that the limited energy is a bottleneck of WSN and UAV, especially for energy that relies on a battery. Therefore, in this section, we provide a mathematical model for energy consumption. The working setup and a functional radio model are adopted to describe the overall UAV-WSN energy status for every sensor node during each working period. The consumed energy Es of a sensor node consists of acquiring sensor data

It is obvious that the sensor node could reduce energy consumption by electing a group leader during every working cycle, similar to traditional WSN frameworks such as LEACH, HEER, and others. For fixed-group leaders, we also use the working function and setup radio model to analyze the energy consumption Eg, which can be computed as follows


Let a group WSN have ng sensor nodes and a fixed-group leader, where
For the UAV-Sink, most energy is used for flying, with a small portion used to collect data from group leaders. There are k group sub-WSNs and the UAV flying time is Tu seconds. The energy consumption of an UAV is the integration of the energy used to fly (f (e, t)) from 0 to Tu and the summation of communication with every group leader


For simplification, we assumed that the UAV is flying at a constant speed V (m/s) and covering a specific distance Df. Following the above analysis, we obtained the simplified equation (5). Using equation (5) to decrease the energy used by a UAV-Sink for a constant number of sensor nodes and communication loads, the best choice is to reduce the flight time (namely, reduce the flying distance). This is the focus of attention of our study.
Grouping for land-WSN
We used a weighted k-means cluster algorithm (WKMC) to group the land-WSNs. There are n sensor nodes in the land-WSN, which can communicate with other nearby sensors through a wireless transceiver. For a set of sensor nodes S, each senor node Si∈S periodically reads and reports its measurement. Furthermore, given a set of group leaders G = {g1, g2, g3, &, gk}, every group leader gj∈G is a responder to collect the member readings and manage the subsystem. It is easy to obtain that the set of all nodes in the WSN N = S∪G. We define vector Xi = {xi1, xi2, xi3, &, xin} as a parameter of the element node∈N, such as coordinates, sensor type, communication qualities, and other indexes of wireless networks. We randomly chose a group leader with its parameter vector

where


We assumed that the size of the sensor node forwarding data is the same, and the constraint ng is an integer with a value above zero. The value range of ng can be obtained using PLR (Average Packet lost rate, PLR) as the QoS index, namely,
where Ni and m are the neighboring set of sensor node I and the number of neighbors belonging to cluster gj, respectively. The formula (9) aims to compute the weight

where Cj is the centroid of the group leader, namely,

SA for flight planning
In section “Grouping for land-WSN,” we have provided a novel approach for grouping land-WSNs based on WKMC. However, one problem of the flight path planning for the UAV that minimizes the energy consumption, which is significant for battery-powered UAVs, still needs to be solved. In this section, a simulation annealing algorithm is introduced as part of our approach.
From section “Grouping for land-WSN,” we obtain the WSN group leader parameter vector

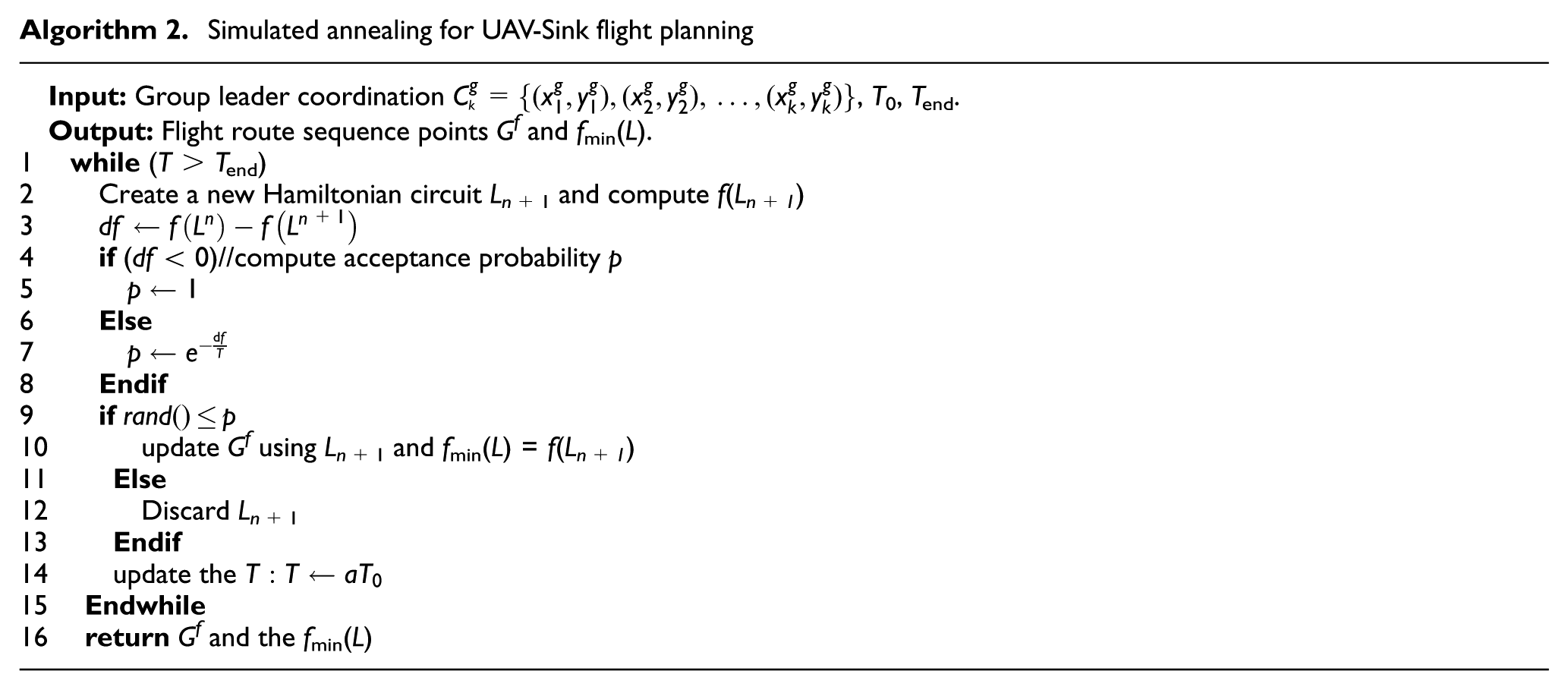
SA is one effective method for low-scale TSPs. In SA, we used the Metropolis rule (12) to compute the acceptance probability p, using the following equation

where T is the current temperature, df = f(Ln) − f(Ln+1), and f(Ln) is the nth iteration path length. The objective of SA is to find the shortest flight path fmin(L) and the corresponding set Gf for the flight sequence points. Algorithm 2 provides the SA pseudocode for flight planning, where T0 and Tend are the initial and end temperatures, respectively. For every iteration, T gradually decreases toward T = aT0, where a is the decay factor of the temperature.
Simulation results and implementation
Simulation studies were performed to evaluate the performance and accuracy of the proposed algorithm. After analyzing the simulation results, the properties of the proposed approach are shown in comparison to related studies, in terms of energy consumption, number of living nodes, and the data collection integrity of the WSN. Then, the methods are implemented in a real UAV-WSN application, which uses UAV-WSN and the proposed approach to collect environmental parameters such as temperature, moisture, and solar energy density. The simulation parameters, setup, and results are then presented in this section.
Simulation setup
To measure the performance of our approach, a simulated UAV-WSN is configured in an area of 1000 m by 1000 m with 1000 sensors randomly placed in the field and a data packet size of 400 bits. All sensor nodes are assigned 1 J of initial energy, and in our method the group leaders are equipped with a charging system. Initially, the sensor nodes randomly generate PLR between each sensor and its neighbors to represent communication quality. The UAV-Sink flying height is 100 m, and its velocity is 5 m/s. The parameters of the networks are shown in Table 1.
UAV and WSN parameters.

UAV: unmanned aerial vehicles; WSN: wireless sensor networks.
Figure 3 shows the simulation bench of UAV-WSN using the WKMC approach and the UAV flight path, using algorithm 2. There are 20 group leaders in this simulation setup. In Figure 3(a), we use different colors to represent the different group sensors, with the mark “⋄” denoting the group leaders. The blue line demonstrates the flight path. In the next section, WKMC will be compared with related studies.

Simulation field and UAV flight path. (a) Sensor field with group leaders and (b) UAV flight path.
Result analysis
Network life
We define network life as more than 30% sensor nodes being alive. The network life of our method is compared with three classical methods, PUSN, 31 GLRM, 32 HEER, 33 and TSEP, 34 in terms of network lifetime performance. The number of live nodes at each different round is reported. Our method, denoted by WKMC, exhibits the longest average network life. Figure 4 depicts the number of live nodes throughout the life of the network and presents a progressive view. The solid line with star symbol shows the results of WKMC. The average improvement using this method relative to PUSN and GLRM in terms of lifespan is greater than 10%. There are two reasons why our proposed model is superior to other grouping strategies. First, our framework adopts fixed nodes as group leaders, which reduces the energy consumption by the requirements for electing group leaders. Second, while grouping leaders use k-means, the communication quality of nodes is considered, which could reduce retransmission due to packet loss. Therefore, as Figure 4 shows, our proposed method provides an advantage in network life.
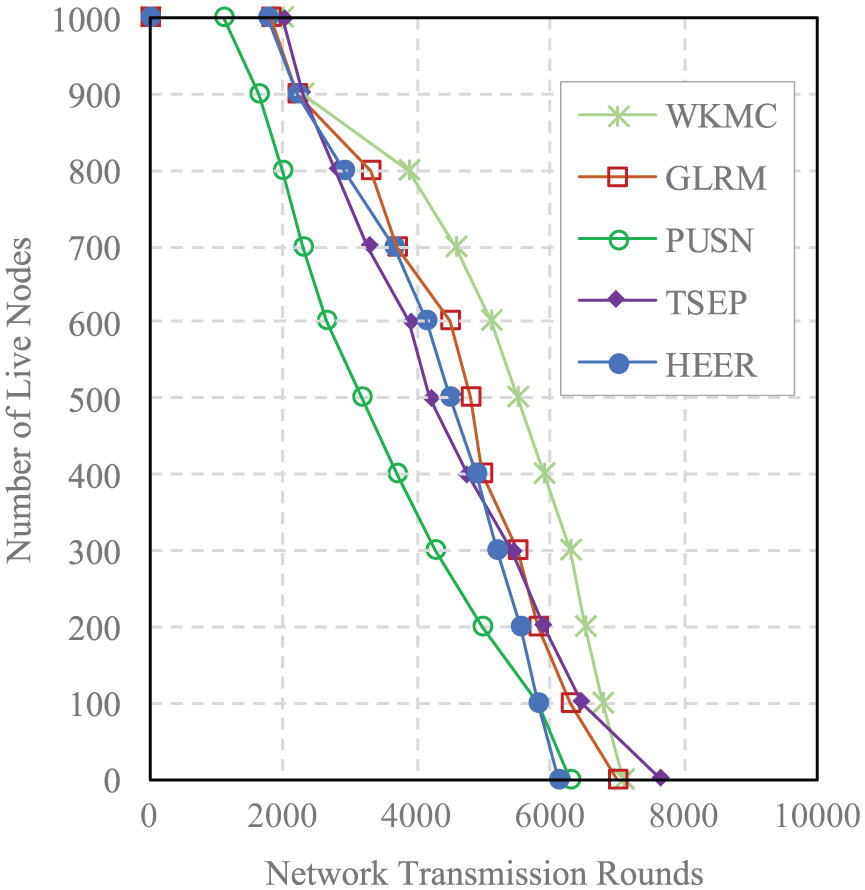
Live nodes throughout the network lifetime.
Flying time
To show the performance of the flight time and the UAV-Sink distance, Figure 5 depicts the assessment criteria in detail. Three different flying methods are compared: (1) our approach WKMC-SA; (2) the Cluster-Random method, which groups WSN without optimizing the flight path; and (3) the Random method, which has no grouping or flight path planning. It is obvious that our approach outperforms the two other strategies. In terms of flight distance and flight time, our proposed method offers reductions of 57% and 86%, respectively. In other words, WKMC-SA for UAV-WSN can save more energy while flying.
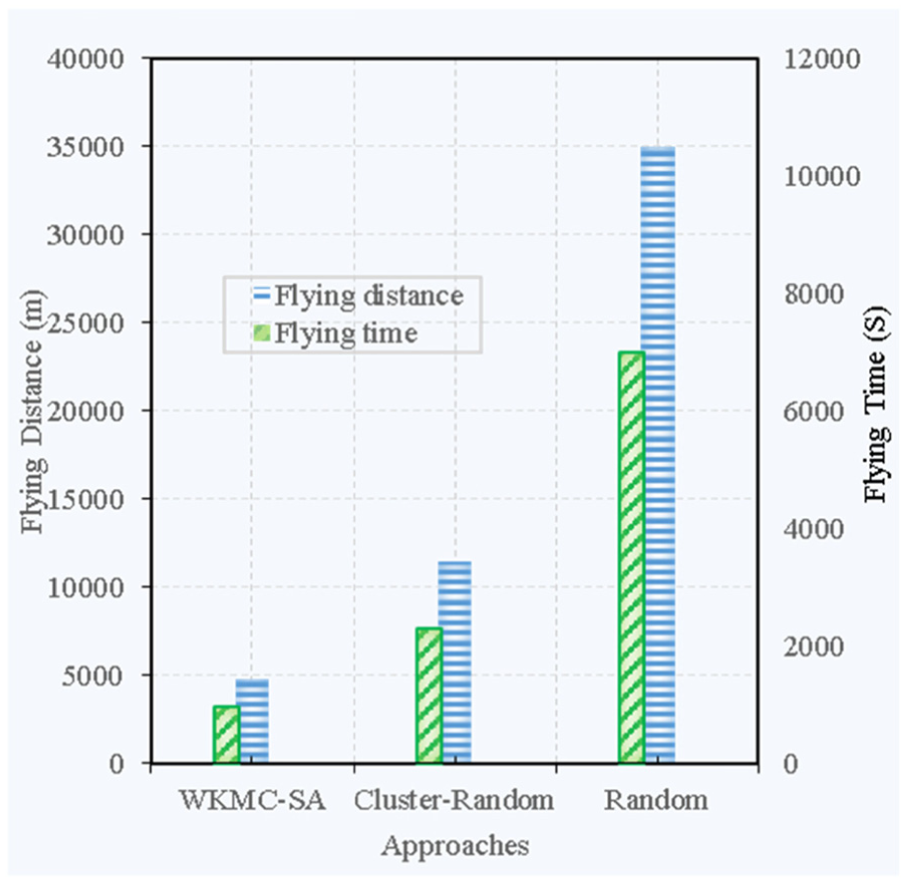
Comparison of flight distance and time for UAV-Sink.
Data reception success rate
The Data Reception Success Rate (DRSR) is the ratio between the received data quantity and the total amount of data within the network. DRSR plays a significant role in WSN and is one of the most important parameters that can be used as an evaluation indicator for UAV-WSN. The PUSN, 31 HEER, and ULSN 23 strategies are used for comparison with WKMC-SA. Figure 6 provides more information about the DRSR simulation results. Obviously, our proposal has a high DRSR value since our approach considers the scale of every group and its communication quality. WKMC-SA can adjust the number of group leaders to satisfy the constraint condition. HEER and PUSN 31 do not take these factors into account; consequently, they perform poorly with respect to this index. Since the number of nodes is increased, methods without a group scheme have a decreasing DRSR trend since the UAV-Sink cannot receive all sensor data within the short coverage time.

Data Reception Success Rates for different approaches.
Conclusion
In this article, we have presented a novel cooperative strategy and WKMC-SA algorithm, introducing an effective method for grouping WSNs and adaptively scheduling missions for UAVs in order to collect sensor data. Compared to current approaches that periodically elect group leaders and perform UAV flight planning without considering the current network structure, our approach adopts a fixed-group leader via k-means clustering according to their communication qualities, position, and other factors. This grouping method can reduce the energy consumption and the process of election. Furthermore, WKMC-SA can decrease the complexity of the data collection. A classical method is then used to solve the flight planning. The performance of WKMC-SA is then evaluated with a simulation system. The results demonstrate that WKMC-SA outperforms current methods in terms of energy consumption, flight times, and DSSR of UAV-WSN.
Footnotes
Acknowledgements
H.-R.C. conducted the study and drafted the initial version of the manuscript. Z.Y. coordinated and supervised the development of the work and provided useful advice. X.Y. finished the experiment and practical implementation. All authors discussed the results and commented on the manuscripts at all stages of the research.
Academic Editor: Christos Anagnostopoulos
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Water Resource Science and Technology Innovation Program of Guangdong Province with NO. 2016-18 and the Youth Innovation Project of Important Program for college of Guangdong province with No. 2015KQNCX228. Furthermore, this work was partly supported by the colleagues in the Department of Electronic Communication & Software Engineering Nanfang College of Sun Yat-sen University.