
Abstract
In wireless sensor networks, the accurate estimation of distances between sensor nodes is essential. In addition to the distance information available for immediate neighbors within a sensing range, the distance estimation of two-hop neighbors can be exploited in various wireless sensor network applications such as sensor localization, robust data transfer against hidden terminals, and geographic greedy routing. In this article, we propose a two-hop distance estimation method, which first obtains the region in which the two-hop neighbor nodes possibly exist and then takes the average of the distances to the points in that region. The improvement in the estimation accuracy achieved by the proposed method is analyzed in comparison with a simple summation method that adds two single-hop distances as an estimate of a two-hop distance. Numerical simulation results show that in comparison with other existing distance estimation methods, the proposed method significantly reduces the distance estimation error over a wide range of node densities.
Introduction
Wireless sensor networks (WSNs) have been widely researched and are now actively being applied to numerous areas, such as environmental sensing, health-care monitoring, industrial monitoring, and military networking. 1 Usually, WSNs are composed of a number of sensor nodes with limited sensing, computing, and communicating capabilities. Each sensor node collaborates with others in sensing, detecting, and tracking events of interests. For example, in military applications, such as battlefield surveillance, sensor nodes are capable of detecting military objects using various sensors (e.g. acoustic, vibration, and motion). If an event is triggered by a sensor in a sensor node, it reports the acquired data of the event to a sink node, usually stamped with the time and location information. Using the reported information from multiple sensor nodes, the position and speed of the target object can be inferred. In health-care monitoring applications, sensor nodes can be used for monitoring vital signs of patients in a hospital. As sensor nodes are attached to each individual patient, the position of the patient is directly obtained by the location of the sensor. If the sensor node provides accurate location information in an emergency, the patient can be found in a short time. Since the location information of sensor nodes is directly and indirectly exploited for the purposes of sensor network applications, how each sensor node obtains its accurate position is one of the most important research issues and many efforts have been made to improve the localization accuracy.
Localization algorithms for WSNs can be divided into two major types: range-free localization and range-based localization.2,3 Range-free localization algorithms usually do not require direct information about the distance or angle between the nodes. They only need to deploy a few anchor nodes in the network for obtaining information about the connectivity or distance between anchor nodes and a small number of sensor nodes. Many range-free localization algorithms, such as connectivity-based localization4,5 and centroid-based localization,6,7 have been studied. Even though the range-free localization algorithms are cost-effective, they usually provide less accuracy than the range-based localization algorithms. Range-based localization algorithms generally provide better accuracy, but additional hardware is required to implement ranging techniques such as time of arrival (ToA), received signal strength indication (RSSI), or chirp spread spectrum (CSS). Using the distance measured by a ranging technique, the location of nodes can be determined by exploiting the multilateration algorithm, 8 multidimensional scaling (MDS) scheme, 9 or semi-definite programming (SDP) algorithm. 10 To achieve high accuracy of localization, accurate distance estimation is essential in both kinds of localization algorithms, because the localization of sensor nodes is performed using the estimated distance information if the distance between nodes cannot be directly measured. For example, in range-free localization algorithms, connectivity-based localizations exploiting distance vector (DV)-hop or hop-count need to estimate the distances between a few anchor nodes in order to calculate the expected hop-progress or average hop-size. Range-based localization algorithms require more precise distance estimation because the estimated distances between nodes are directly utilized to calculate the location of the nodes. For instance, the multilateration algorithm in the work by Zhou et al. 8 necessarily requires accurate information about the distance from anchor nodes to the target sensor node to solve an optimization problem. In the work by Shang and Rum, 9 the MDS-based localization scheme combines single-hop and two-hop distance information into a distance matrix to build a map of the relative locations of nodes. While the single-hop distance can be easily measured in most cases with the help of advanced ranging techniques, the two-hop distance cannot be directly carried out by ranging techniques, and it is approximated by a simple summation of two single-hop distances. As a result, considerable error may be introduced, and consequently, the accuracy of localization is reduced.
Many researchers have developed two-hop distance estimation methods in various ways to improve accuracy. Most of them attempted to characterize the relationship between the hop-count and the geographic distance among nodes (i.e. per-hop distance). Note that the two-hop distance is obtained by two times per-hop distance. In the work by Quanrui et al., 11 the incongruity of the assumption in typical DV-hop-based distance estimation methods is highlighted, which presume that the hop-size is always the same regardless of hop-count. The authors analyzed the relationship between hop-size and hop-count and proposed a new hop-size estimation method, which works much better in dense networks. In the work by Choi and Ma, 12 a two-hop distance estimation algorithm, which considers both range-based and connectivity-based information, has been proposed. However, the drawback of this approach is that both types of information are not exploited concurrently, but one of them is selectively used depending on the network condition. Song and Tam 13 proposed to take the average of hop-sizes obtained for all anchor nodes as a hop-size of unknown node instead of that obtained for the anchor node that is the closest one to the unknown node. However, this approach may give a poor estimate of per-hop distance in anisotropic sensor networks if an appropriate refinement postprocessing is not performed. Zhipeng et al. 14 have proposed twice weighted DV-hop (TWDV-hop) algorithm to balance the global and local topological characteristics in estimation of per-hop distance. Each anchor node first computes the average per-hop distance to all the other anchor nodes locally and then the global per-hop distance is calculated by a weighted sum of the local per-hop distances. The per-hop distance between nodes is estimated using a weighted sum of the local and global per-hop distances with different weights depending on network topology conditions.
In addition, density-aware hop-progress estimation schemes have also been studied.15–17 Wang et al. 15 have proposed the localization algorithm using expected hop progress (LEAP) with respect to the node density of the network, in which nodes are randomly distributed by the Poisson point process. In this approach, the multihop distance is simply calculated as the product of the expected hop-progress and hop-counts. To apply the distance estimation in an environment similar to the real network more appropriately, a multihop distance estimation algorithm using the local expected hop length (LEHL) has been considered by Myint et al. 16 In contrast with LAEP, which uses the average node density of the network, LEHL exploits the local node density to improve the distance estimation accuracy even for a nonuniformly deployed topology. Ma et al. 17 have proposed a source-to-sink distance estimation scheme that exploits the correlation between the source-to-sink distance and the hop-counts of source node’s neighbors to the sink. They formulated the source-to-sink distance estimation as a constrained optimization that minimizes the discrepancy between the actual number and the expected number of source node’s neighbors for different hop-counts to the sink when the node density is given.
In this article, we consider an estimation of the two-hop distance in WSNs where every single-hop distance between neighbor nodes is assumed to be easily obtained by any kind of ranging technique. We propose a two-hop distance estimation method, which first obtains the region in which the two-hop neighbor nodes possibly exist and then takes the average of the distances to the points in that region in order to reduce the average estimation error of the two-hop distance. To examine the extent of improvement in the estimation accuracy achievable by the proposed method, a mathematical analysis is performed to compare the estimation accuracy of the proposed method with that of a simple-sum method that adds two single-hop distances as an estimate of a two-hop distance. Through numerical simulations, we verify that the two-hop distance estimated by the proposed method significantly improves accuracy over a wide range of node densities compared to the distances obtained by other existing distance estimation methods.
The remainder of this article is organized as follows. In section “Two-hop distance calculation model,” we first describe a calculation model for two-hop distance estimation. We then propose a two-hop distance estimation method in section “Proposed two-hop distance estimation method.” The performance evaluation is carried out in section “Performance evaluation,” and section “Conclusion” concludes this article.
Two-hop distance calculation model
We consider an estimation of the two-hop distance in WSNs, in which each node is assumed to be capable of measuring the distance to its single-hop neighbor node using a ranging technique. Figure 1 shows an example in which the nodes i and j are two-hop neighbors, and the nodes k and l are the relay nodes between the nodes i and j. Each node i, j, k, and l have the radio range of

where

Illustration of two-hop distance estimation.
In many cases, a simple-sum method is used to estimate the two-hop distances because of its simplicity. The simple-sum method chooses the shortest path among all possible paths between two-hop neighbor nodes and then the two-hop distance is approximately given by the summation of single-hop distances on that path. For example, in Figure 1, the two-hop distance between nodes i and j estimated by applying the simple-sum method is given by

Note that the two-hop distance obtained by the simple-sum method provides the maximum bound of two-hop distance for a given set of two single-hop distances, that is,
Proposed two-hop distance estimation method
In this section, we propose a two-hop distance estimation method, which first computes an arc that the two-hop neighbor nodes possibly exist on and then takes the average distance to the circumference of the arc in order to reduce the estimation error of two-hop distance on average.
First, we consider a region in which the two-hop neighbor nodes of a reference node are expected to exist. Figure 2 shows a situation in which the node i (reference node) and node j are two-hop neighbors, and node k is the relay node between the nodes i and j. Here, since nodes i and k are single-hop neighbors and nodes k and j are single-hop neighbors, the distances

because any point on the arc cannot be included in the circle centered at the node i with radius

Proposed two-hop distance estimation method using an arc in which the two-hop neighbor nodes possibly exist.
To estimate the two-hop distance, we propose to take the average of all possible expected distances between nodes i and j as the final two-hop distance, which is given by

Because of its symmetry, we can simply consider only the top part of the arc. Finally, the two-hop distance estimated using the proposed method is given by

In summary, for given two single-hop distances,
To intuitively see the extent of improvement in the accuracy of the two-hop distance estimation brought about by the proposed method, we compare the range of the arc that achieves higher accuracy using the proposed method with the range of the arc that achieves higher accuracy using the simple-sum method. In Figure 2,

The proposed two-hop distance estimation method gives higher accuracy if node j exists on the blue-colored segment in Figure 2. However, if node j exists on the segment indicated by a green diagonal pattern, the simple-sum method gives a more accurate estimate of the two-hop distance.
Now, the accuracy of the proposed two-hop distance estimation method is evaluated by comparing the lengths of the two segments of the arc. If the blue-colored segment of the arc is longer than the segment with a green diagonal pattern, the proposed method provides more accurate estimation results on average. Since the length of an arc is proportional to its corresponding central angle, the relation between

Illustration of the relation between
Under the assumption,

where

Then,

It can be numerically shown that
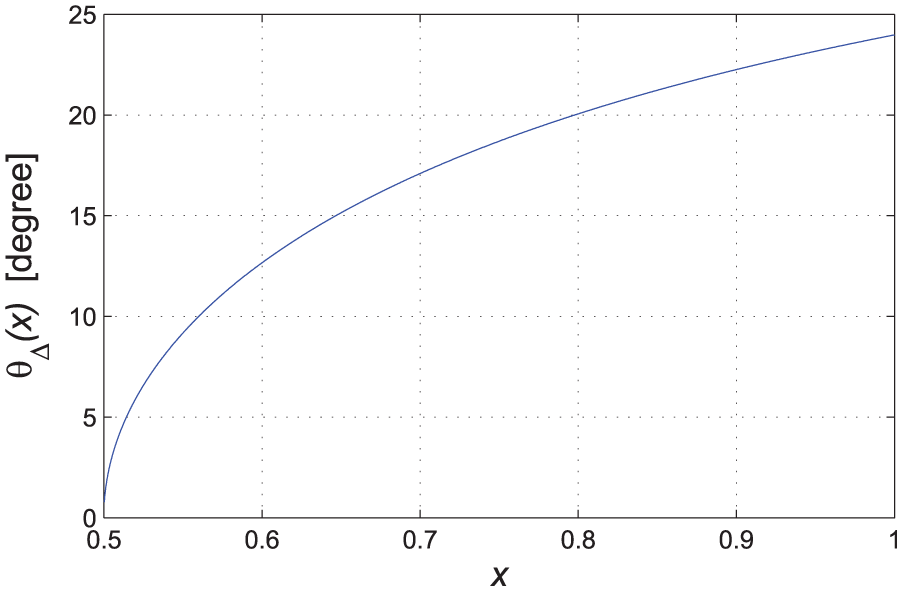
Plot of
To examine whether the proposed method outperforms the simple-sum method in more realistic scenarios, we compute the ratio of

Ratio of
Performance evaluation
To evaluate the performance of the proposed two-hop distance estimation method, we consider a WSN in which the nodes are distributed according to the Poisson point process with a node density
with respect to
First, we examine the probability that the proposed two-hop distance estimation method provides a more accurate estimate of two-hop distance than the simple-sum method. Let
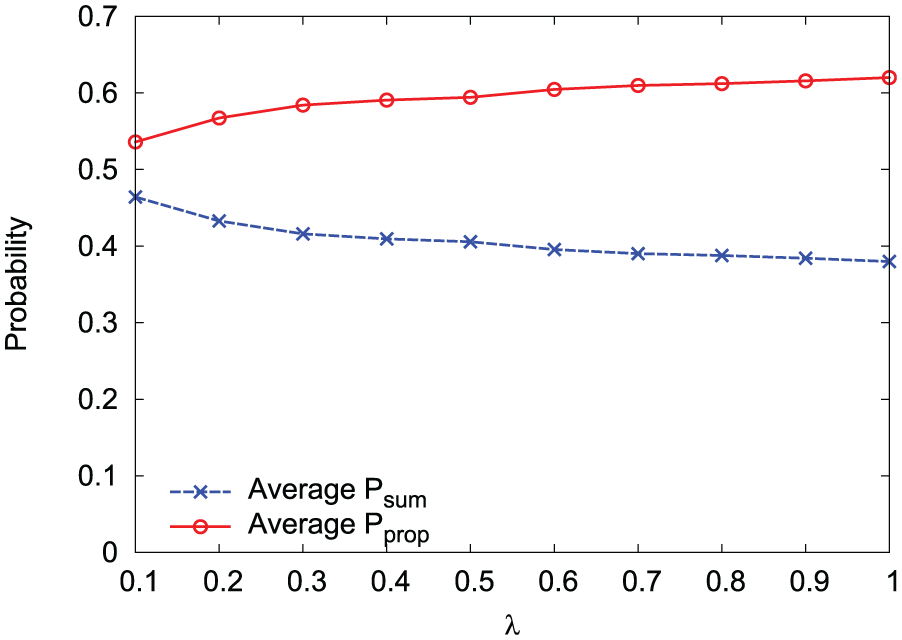
Simulation results of
Distance estimation error with respect to
and R
We perform the Monte Carlo simulations to compute two-hop distance estimation error of the proposed method and compare it with those of the following methods:
Simple-sum method given by equation (2) in section “Two-hop distance calculation model.”
Two-hop distance estimation method by Choi and Ma: 12 It calculates two upper bounds of the angle at a relay node using ranging and connectivity information. Two-hop distance is obtained using the minimum one of two bounds.
TWDV-hop-based method by Zhipeng et al.: 14 It computes the global and local per-hop distances, and the distance between nodes is obtained using the weighted summation of two per-hop distances.
LEHL-based distance estimation by Myint et al.: 16 When the expected hop length is calculated, LEHL exploits the local information about node density and node connectivity, whereas LAEP utilizes only the average node density and average node connectivity of the whole network. In the LEHL-based method, the two-hop distance is estimated from the sum of two expected local hop lengths, which may be different from each other in terms of the local node density or local connectivity.
The reported values of the simulation results represent the average of 10,000 runs. In the figures, the vertical line indicates the 95% confidence interval of each experiment.
We first examine the average two-hop distance estimation error with respect to

Two-hop distance estimation error with respect to node density
Next, we perform the simulations for the scenario where each node has a different radio range. The radio range is determined by a uniform distribution in [10, 50] m. In Figure 8, it is seen that the confidence intervals are much wider than those in Figure 7. This is due to the randomness in the radio ranges of the nodes. The proposed method provides the smallest distance error among the five methods, while the simple-sum method gives the largest error. Among the three methods, LEHL-based method provides the best performance. It implies that LEHL can achieve more robust estimation performance than the other two methods in the situation in which each node has a different radio range.

Two-hop distance estimation error with respect to node density
We evaluate the average two-hop distance estimation error with respect to the radio range. Note that the radio range of nodes may change depending on path loss characteristics in real network environments. In this simulation, the radio range varies from 20 to 50 m because of different path loss exponents, and it also follows a Gaussian random distribution with the standard deviation
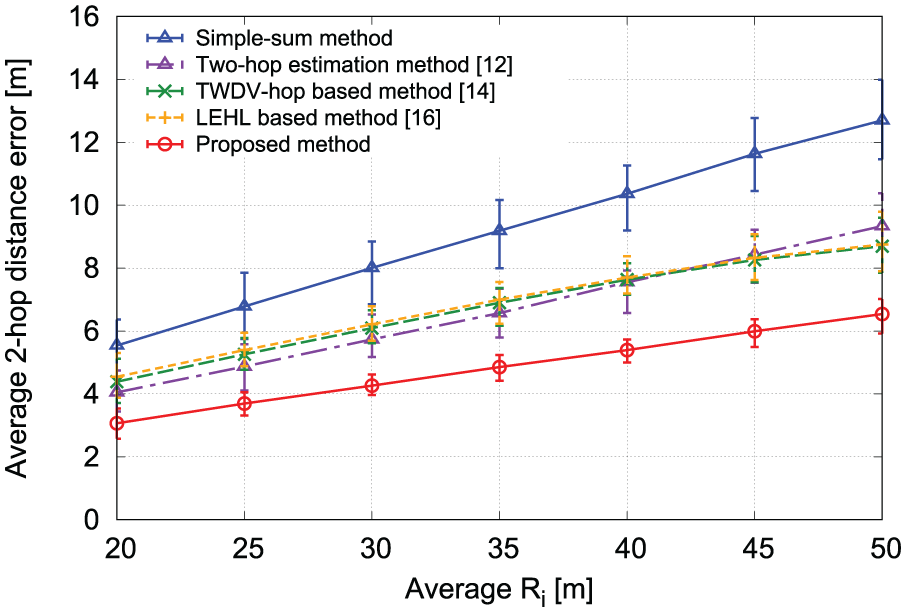
Two-hop distance estimation error with respect to
Energy cost issue
We consider the energy efficiency of two-hop distance estimation. For a given distance R, the proposed method estimates the distances to other nodes within two-hop distance
To examine how much transmit power is saved by two-hop distance estimation, we compute the transmit powers to increase the radio distance from R to
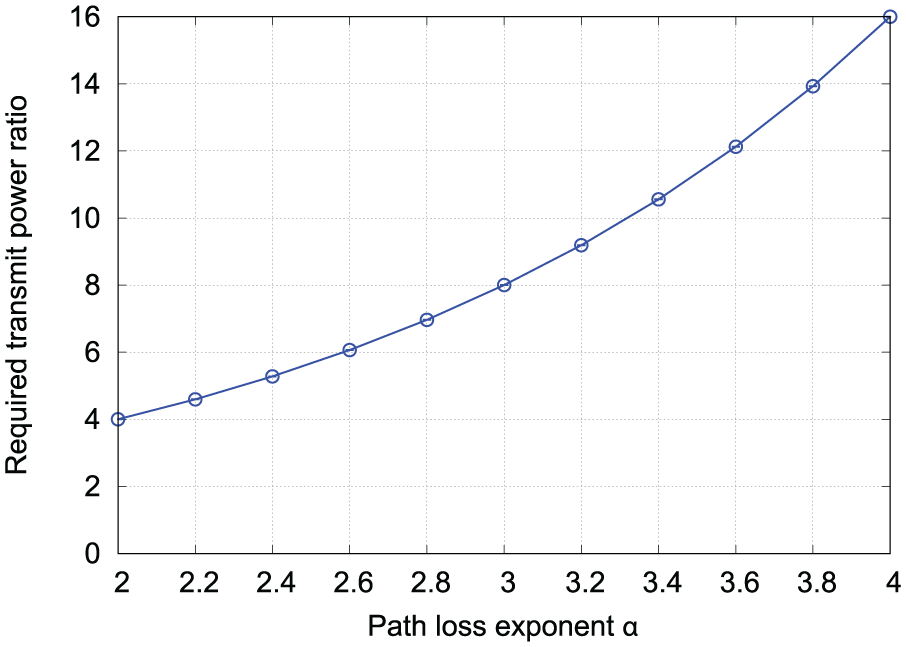
Ratio of transmit power for
Conclusion
In this article, we considered a method for the estimation of the distance between two-hop neighbor nodes in WSNs. Under the assumption that the single-hop distance information of every pair of nodes is available in the network, we proposed a method that estimates two-hop distances by taking the average of all possible expected two-hop distances as the final estimated distance. A mathematical analysis of the comparison between the proposed method and the simple-sum-based estimation provided a reasonable expectation of the significant improvement in accuracy achieved by the proposed two-hop distance estimation method. Results of the numerical simulations confirmed that the accuracy of two-hop distance estimated using the proposed method is significantly increased over a wide range of node densities in a network.
Footnotes
Academic Editor: Christos Anagnostopoulos
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the “Location-based Tactical MANET Communication and Control S/W for Unmanned Ground Systems” project of the Agency for Defense Development (ADD), Republic of Korea.