
Abstract
Next generation wireless networks are expected to be greatly supported by unmanned aerial vehicles, which can act as aerial base stations and constitute a promising solution for the exorbitant rise in user demands. This is possible because of unmanned aerial vehicle characteristics such as mobility, flexibility, increased line-of-sight probability, and their ability to access unreachable locations. Extensive research is now widely performed on the deployment, performance analysis, resource management, trajectory optimization, and channel modeling in such networks. This survey article focuses on the different applications and the related algorithms for realizing aerial base stations by thoroughly reviewing each related research area. In a nutshell, this article provides key applications, challenges, and the technology used for the design and analysis of unmanned aerial vehicles as base stations.
Keywords
Introduction
Unmanned aerial vehicles (UAVs) are highly appreciated for their applications in fifth generation cellular networks (5G). Over the past few decades, the number of mobile users has increased rapidly, not only the user count but also the user demands changed. As we moved from 1G to 5G, the very purpose of cellular communication networks took a turn from mere calling to a substitute for desktops, laptops, and other processing gadgets. Network operators had to deploy large number of base stations (BSs) to serve user equipment (UE) with varying demands. To serve each user, channel has to be allocated and if the user density goes beyond the available channels, the users would not be properly served resulting in low quality of service (QoS). Consequently, to improve the service, the operators are forced to install more BSs. For the deployment of terrestrial BSs, land needs to be acquired so it is a costly affair. UAV BSs are generally termed as aerial base stations (ABs or AirBSs), which are cost efficient compared to the expense of maintaining a terrestrial base station. 1
AirBSs have role in both civil and military applications. Because of their inherent characteristics, namely, mobility, higher level of probability for line-of-sight (LOS) signals, flexibility, and the easiness in changing the altitude level (adaptive altitude), UAVs constitute an inevitable element for the developments in search and rescue operations, vehicle-to-vehicle communication, load balancing in cellular networks, and so on. AirBSs are battery powered; however, their performance varies based on the altitude at which UAVs are placed and on the type of UAV.
UAVs can operate as UEs, network relay nodes, and as BSs. Aerial UEs are also known as cellular-connected UAVs. Besides, the countless applications of AirBS in cellular networks (e.g. 5G, sixth generation era), Internet of things (IoT), and wireless networks, now UAVs have also started being used in maritime communication networks (MCNs) to provide on-demand services onboard.2–4 In medical scenarios, video photography, goods shipping and delivery, and geographical mapping applications, UAVs are modeled as flying UEs. Moreover, aerial UEs have applications in agriculture, weather forecasting, and disaster area photography to assist search and rescue operations. Cases of volcanic eruptions, border surveillance, disaster reporting, remote sensing, and forest fire monitoring are some of the usage scenarios where UAVs can act as network relay nodes.
Figure 1 shows a scenario where the AirBSs (marked as drones) are acting as a relay between the users (marked as UE) and terrestrial network. Terrestrial base station is notated as BS in Figure 1. The marked cell region contains mobile users that are in outage; hence, they are not served by the terrestrial BS. Such mobile users who are in remote areas (away from cell tower locations) can be served by AirBS or drones. Between drones the medium is air; hence, there exist air links for communication among the AirBS. Communication between the AirBSs can take place either in a centralized manner or in decentralized way. The AirBS gets the data from the terrestrial BSs. Upon the data reception from the already deployed terrestrial BS, these drones can pass on the data to the intended users, who were in outage initially. As a result, the geographical region without signal coverage gets good signal coverage. In such cases, the users are served by AirBSs, although they are out of the coverage radius of the primary terrestrial BS. Deployment of aerial drones not only provides good QoS but also a cost-efficient strategy. This method is highly recommended especially in case of natural calamities where the deployment of terrestrial network is dangerous. Aerial drones can easily fly to any location and can establish the necessary communication link for the signal deprived areas. UAVs are broadly classified based on altitude and type. Based on the altitude at which the AirBSs are deployed, they are classified as high-altitude platforms (HAPs) and low-altitude platforms (LAPs). Devices may experience wireless connectivity issues because of severe shadowing or as an after effect of natural disaster so in such situations UAVs can help in providing high-speed wireless connectivity due to their ability to reach any inaccessible location and high LOS probability. UAVs can be used as relays to link between two end elements in the communication system. 4 Terrestrial base station networks (BSNs) are compared with AirBS networks in Table 1.

AirBSs serving a remote area acting as relays between the users and terrestrial.
Comparison of aerial BSN with terrestrial BSN.

UAV: unmanned aerial vehicle.
HAPs can provide service to large geographical area, thereby this results in wider coverage and longer endurance. HAPs are deployed in the stratosphere region, in the order of 10 km above the ground surface. LAPs are operated from an altitude in the order of several kilometers and can be deployed more easily compared to HAPs. Based on the flight type, AirBSs are classified as rotary and fixed wing UAVs. Rotary wing–type UAVs can hover over a specific location in low speed, and usually the flight time is less than 1 h. Whereas fixed wing UAVs can fly for several hours, but to stay aloft, they must take forward movements. UAVs that are used in all these applications weigh less than 25 kg. 2 Figure 2 shows the classification of UAVs based on type and altitude. Based on the UAV technical characteristics and structure, the most common types of UAVs that are used in communication networks are single rotor, multi-rotor, fixed wing, and fixed wing hybrids. 5 The fixed wing–type makes use of normal wings as lifting force. The respective UAVs are high-speed with power efficient design as energy is used only for forward movement. Gas engines constitute an alternative for this type. These UAVs can have a flight time of around 16 h; as a result, they are useful for long-distance missions. However, fixed type UAVs cannot be used for hovering applications as they are not able to hover over a particular location.

Classification of UAVs based on altitude and wing type.
Similarly to fixed wing–type UAVs, single rotor UAVs can also be powered with gas engines, contributing to longer aerial time. Although they are efficient in design, they are complex, expensive, and larger in size. Fixed wing hybrid UAVs perfectly combine the hovering capability of the rotor design with the forward flight ability of the fixed wing type. Amazon’s prime air deliver drone is an example of the fixed wing hybrid type. These UAVs have fixed wings attached with rotors, enabling them to hover, take off, and land vertically. These are still in developing stage and have become an interesting area for design engineers to look forward. Multi-rotor UAVs make the cheapest option compared to other types. Aerial surveillance and photography are the most effective applications of multi-rotor UAVs, as they have greater control over position, framing, and they possess high degree of mobility. These drones can make side-to-side movements, can rotate on their own axis, can fly closely through structures or buildings, and can move up and down vertically along with the front-to-back motions. Multi-rotor UAVs are sub-classified based on the number of rotors included by design, namely, tricopters, quadcopters, hexacopters, and octocopters. Quadcopters consist of four rotors, and they are the most used multi-rotor UAVs. 5 Tricopters, hexacopters, and octocopters contain three, six, and eight rotors, respectively. An interesting use of multi-rotor drones is in the context of maritime applications. Table 2 shows the merits and demerits of various UAV types classified based on their structure and flight. Table 3 provides the classification of UAVs based on their size, whereas Table 4 presents another UAV classification based on range.
Classification of aerial drones based on structure.

Classification of aerial drones based on size.

GPS: Global Positioning System.
UAV classification based on range. 6

UAV: unmanned aerial vehicle.
Payload is the weight a UAV can carry, like the weight of camera, package, sensors, or any load it must carry. UAV flight time is inversely related to the payload. As the payload increases, the UAV has to utilize more battery energy to lift it. Flight time of heavy payload UAVs is comparatively less to those UAVs carrying less weight. A bigger battery equipped UAV, however, can better handle heavy payloads.
Generally, a UAV system consists of a vehicle, tracking control system, ground control station, and a system to disseminate data. A UAV vehicle includes a payload, power supply, avionics equipment, propulsion source, and a data link equipment. 7 Flight direction, speed, and altitude are controlled by avionics equipment. UAVs can be battery powered or can operate on engine-generated power. Making use of solar energy to power the UAVs is an area that demands research attention. Smaller UAVs are used for real-time and near real-time data collection, as onboard processing is limited in such UAVs. Smaller drones travel at 15 m/s, where larger ones can attain 100 m/s. UAV vehicles include control data link and payload data link. The control data link handles vehicle telemetry data and signals for vehicle control. The payload data link handles data from UAV to user for data processing. 7
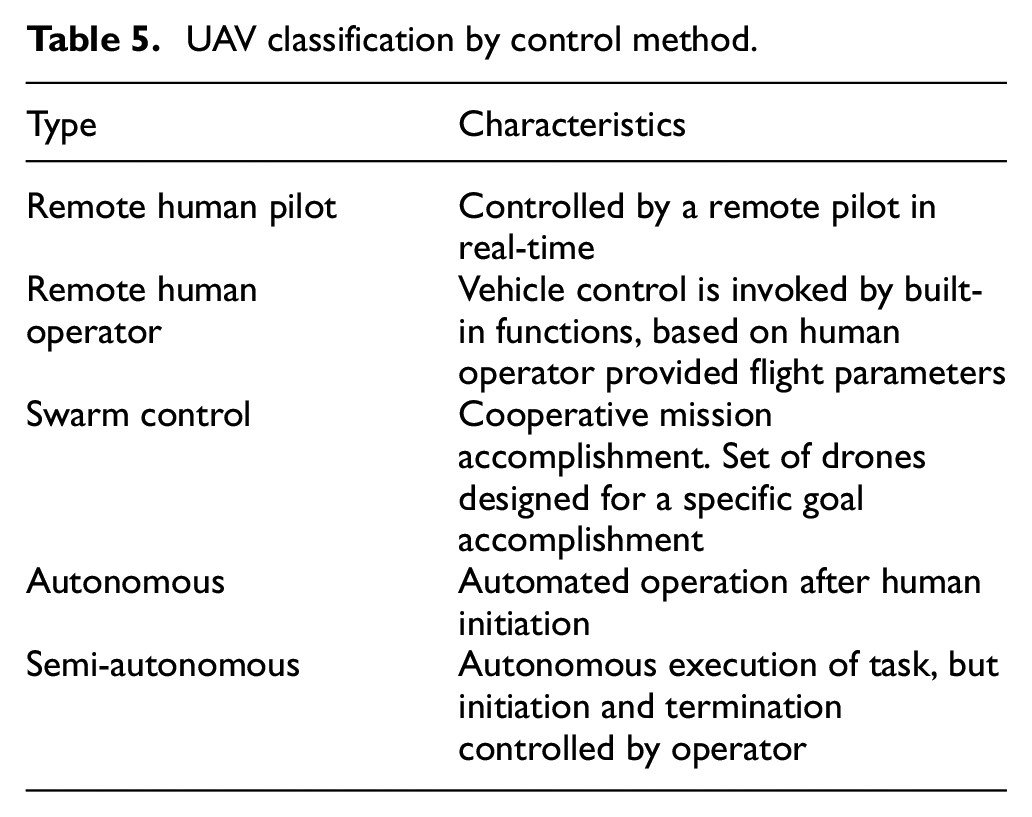
The main contribution of this article is to provide a rapid review on the applications of UAVs in the most demanding areas of the industry-like cellular wireless networks, integration with artificial intelligence (AI), marine sector, and so on. Integrating the UAV technology with AI has put forward an era of self-organizing drones. Self-organizing drones can adjust their altitude and direction according to the user distribution. Most of the previous works focused on the use cases of UAVs in 5G/6G wireless communication. Marine communication networks were completely ignored in the previous surveys, as they gave prime importance for terrestrial wireless networks. Around 80% of the goods are traded internationally through carrier vessels. Thus, improving the Internet connectivity over the sea will drastically affect the global economy. IoT deals with massive machine communication. With the advent of 5G/6G, nowadays, every device can act as a server and host. This article focuses on UAV deployment, network planning, channel modeling, resource allocation, improving coverage for the applications with IoT, AI, terrestrial network, marine communication, sea–land–air hybrid network, and cellular communication application with UAVs. The UAV control method in these applications can vary from human controlled, human initiated, autonomous, or semi-autonomous. Table 5 depicts the different control methods and the respective UAV types.
UAV classification by control method.
Research methodology that has been followed in this article started with a search on UAV applications on Google. The application use cases of UAVs are enormous, so we refined our search with latest papers from IEEE Xplore using the keywords “Aerial Base Stations,”“UAV applications on wireless communication,”“UAV deployment,”“Unmanned Aerial Vehicles,”“Energy efficient UAV,”“UAV Optimization,”“UAV in IoT,” and so on. A systematic review research methodology has been adopted in this article. The information needed is mostly sourced from digital platforms like IEEE Xplore Digital Library, Google Scholar, and Elseiver online. We have focused mostly on the research works published from 2015 onwards. Relevant research surveys done on UAV communication are listed in Table 6.
Relevant surveys on UAV communication.

UAV: unmanned aerial vehicle; MEC: mobile edge computing.
Motivating applications
Putting forward the flexibility, mobility, and adaptability in altitude, UAVs have many benefits and applications. UAV-based communication complements IoT, LOS communications, and on-demand communications, and it helps in enhancing coverage and capacity. A well-integrated architecture is required to maintain the coordination among different UAVs. UAV traffic management (UTM) is needed to get the drones to airspace. UAVs have found their footprint in military, maritime communication, IoT, 5G communication, and in next generation wireless networks. The research direction in aforementioned areas includes air-to-ground modeling, optimal deployment of UAVs as BSs, optimization of UAV trajectory, analyzing the performance of UAV-enabled wireless networks, cellular network planning with UAVs, drone UEs in wireless networks, resource management, interference mitigation, collision avoidance, and minimizing latency in the communication between user device and the UAV.
Maritime communication
UAVs are effectively used in maritime and offshore services, to gather data for inspection process, security and surveillance, maritime search and rescue, autonomous deliveries, and autonomous ships.6,7,21–23 Wang et al., 24 Campos et al., 25 Wei et al., 26 Zhou et al., 27 and Saarnisaari et al. 28 proposed different system models to achieve high-speed connectivity by incorporating UAVs with on-board BSs. Signal strength experienced by the devices on vessels is relatively weaker compared to offshore communication network. 5G, 6G, and even Long-Term Evolution (LTE) together enable high-speed Internet connectivity.29–36 Optimal placement of UAVs for coverage enhancement at sea satisfying the energy, backhaul, and interference constraints is discussed in Teixeira et al., 37 Li et al., 38 and Yang et al. 39 More details on how AirBSs help the maritime sector will be dealt in section “Maritime communication.” To extend the coverage, drones need to be deployed in regions with coverage holes. Deployment of drones is a three-dimensional (3D) problem that requires altitude adjustment. 39 Besides maritime sector, the impact of AirBSs is widespread from search and rescue operations, 40 to advanced technical applications to the society.41–46 Khawaja et al., 47 Wang et al., 48 and Xia et al. 49 developed air-to-ground channel models for broadband maritime communication.
Fifth generation cellular networks
5G has changed the entire realm of wireless communication by its low latency, high user handling capability, high reliability, and high-speed communication links for data transfer. Services of fifth generation networks are broadly classified into three sub-areas, namely, enhance mobile broadband (eMBB),50,51 massive IoT a.k.a., massive machine–type communications (mMTCs), 52 and mission critical communications. Mission critical communications represent ultra-reliable and low latency communications (URLLCs).53,54 UAV-based services in 5G are discussed in section “Fifth generation cellular networks.” Countless applications of aerial drones in wireless communications are explicitly studied by researchers. Tahat et al., 55 Mozaffari et al., 56 Wu et al., 57 Savkin and Huang, 58 and Sharafeddine and Islambouli 59 developed algorithms for the optimal placement of UAVs. When multiple UAVs are deployed, there must be cooperation among the drones for faster operation. 60 A typical AirBS requires a maximum transmit power of 5 W. AirBS deployment is not a single variable function, rather it depends on multiple factors as pointed in section “Fifth generation cellular networks.” Deployment can be done by maximizing coverage, 61 data rates,62–64 energy efficiency,65–70 along with optimal path planning.71–74 Most of the previous research works have proposed deployment strategies that could optimize a maximum of two factors.
IoT
IoT deals with the technology that transforms the physical objects to processing able units with the help of embedded sensors and software. They have created a strong foothold in civil, military, organizational, infrastructure, industrial, and consumer applications. Wired technologies, short-range, medium-range, and long-range wireless, and application layer frameworks are the few enabling technologies that pave the communication link between the IoT devices. UAVs can be employed to provide efficient uplink but also downlink IoT communications. Mostly, IoT devices are battery powered, and they transmit at low power. Because of the adaptive altitude nature of UAVs, they can provide a clear LOS communication link to the IoT devices. So, UAVs mainly serve as flying AirBSs in such IoT-related scenarios,52,75–80 which are further detailed in section “ IoT.”
Integration with AI
AI is incorporated into cellular networks to attain network intelligence in future cellular networks. Machine learning has already proved its footprint in most research areas, like image processing, autonomous vehicles, speech recognition, and even in wireless communication. Two new emerging areas where wireless communication uses AI are edge intelligence and AI-empowered wireless. Section “Optimization techniques” provides the review on integration of wireless communication with AI.81–93
Mathematical tools and techniques
For wireless communication, it is important to provide better coverage with enhanced capacity. However, the power efficiency must be improved by optimizing the network parameters. So, the research problem can be modeling of the channel, resource management, path planning, performance analysis, trajectory optimization, and so on. Similar research problems exist with IoT applications, cellular planning, under water communication, and so on. Depending upon the research problem, the researcher must make use of different tools. Ray-tracing techniques and machine learning are most appropriate for research problems dealing with channel modeling. For the deployment of AirBSs, in the presence of terrestrial networks, some of the useful mathematical tools are centralized optimization theory and facility location theory. Machine learning is useful for channel modeling, trajectory optimization, and cellular-connected UAV-UEs, whereas centralized optimization theory is useful for UAV deployment problems, cellular network planning with UAVs, resource management, energy efficiency problems, trajectory optimization, and in research area like cellular-connected UAV-UEs. Probability theory, stochastic geometry, and information theory are possible options for the research works in analyzing the performance of UAV-enabled wireless networks.
Communication applications need optimum outcome, so the parameters need to be optimized for 5G, 6G, or other applications. For optimized results, one may have to employ optimization techniques, namely, artificial bee colony (ABC) algorithm, genetic algorithm (GA), particle swarm optimization (PSO), greedy algorithm, and so on.94–107
UAV as aerial UE
The role of UAV as an aerial UE was a breathtaking discovery for the development of new technologies. Due to the widespread application of UAVs in photography, the companies have come forward with research opportunities as they have a notably large market for hobby and commercial drones. UAVs as UEs have contributed to logistics, the medical field, event capturing, and so on. Before the advent of UAVs, to capture the sports events or sky view of an area, helicopters or cranes were required. However, in applications of UAVs as UEs, the drone payload plays an important role. Especially, to carry packages, sensors, cameras, and other essentials, the UAV must be designed to lift that weight. Maritime industry has benefited from the UE service during critical rescue operations or other exigencies. UEs can be used by market teams like Amazon, Flipkart, and Walmart for the delivery of small packages in remote locations or even in urban or sub-urban regions. Such application has the potential to even reduce the road traffic as delivery agents are not needed, while it also enhances the delivery speed.
UAV-assisted emergency networks
The role of UAV as an AirBS was a life-saving discovery in search and rescue operations. Traditional wireless communication is dependent on a terrestrial BS. The BS antenna does the signaling operation and users get connectivity if they are under the signal coverage area of the concerned BS. However, due to natural calamities like flood, landslides, tsunami, earthquake, and forest fire, the terrestrial BS may get damaged, thereby putting a blow on communication network. 108 So, it is crucial to have a fast employable, reliable, and flexible emergency network for public safety. AirBSs are best suitable to establish a reliable communication at times of emergency. When terrestrial BS is damaged due to natural or man-made disaster, AirBS is sent to the exact location of damaged BS and provides the necessary communication link to the ground devices. Deployment of AirBSs is easy as they can fly and reach to the disaster-affected scenarios. Trajectory and UAV scheduling are jointly optimized to improve the link quality.
If one or more active BSs are available near the calamity affected area, then the newly deployed AirBS can cooperate with available surviving terrestrial BSs to provide the service to the users. If there are no terrestrial BSs are available, then a large UAV with high power capability can be sent to revive the situation. Device-to-device communication among the devices is an extra add-on in assisting emergency networks. With the support of multi-hop UAV relaying, rescue measures can be carried out even in hard-to-reach locations. Quadcopters, balloons, and gliders are some examples of UAV types used in delivering connectivity in public safety communication. 108 Development of low complex UAVs, reducing delay in message transmission, and study of UAVs in heterogeneous environment are open for research studies.
UAV with intelligent reflecting surface
Intelligent reflecting surface (IRS) improves the wireless data transmission between the source and destination by reflecting the impinging electromagnetic waves. The amplitude and phase shift of reflected waves are tunable, thereby resulting in tunable reflection coefficient. IRS has the ability to reconfigure the wireless channel environment by suitable combination of received signals and removing the interfering signals. 57 Terrestrial IRS is employed by deployment of IRS materials on the building walls, indoor walls, and ceiling, thereby improving the throughput and enhancing the signal. However, in a terrestrial IRS system, the signal has to undergo multiple reflections before reaching the destiny. 109 This can be overcome with aerial intelligent reflecting surface (AIRS), where IRS is equipped on UAVs. Incorporating the benefits of IRS in UAV-assisted communication will have the benefit of increased system throughput, improved signal-to-noise ratio (SNR), reduced interference levels, improved signal coverage, ensure secure transmission, and a better spectrum efficiency. 110 IRS aids in indoor communication, in terrestrial communication, and also in UAV-assisted communication. IRS can be easily installed on buildings or can be placed in aerial platforms. When IRS is carried in a aerial platform, the signal from the BS will be reflected by AIRS, thereby establishing an LOS link for the users. Even if there are any terrain or man-made blockage between the BS and user, because of the reflecting capability of the AIRS, the users receive quality signal and thereby enhancing the coverage area. Coverage enhancement is feasible if there exist an LOS between the BS and IRS platform, hence AIRS must be placed suitably ensuring LOS with BS and users in dead zone. In order to achieve enhanced coverage, joint optimization of trajectory and beam forming can also be incorporated. 110
Industrial relevance, standards, and projects
In industry, UAVs or drones were developed to use in defense systems, because of their ability to monitor hostile environments. Procurement of drone and drone technology has increased, as most of the countries started implementing drones in military support. The US military has been spending around US$9 billion annually since 2014. An introduction into the applications of UAVs in the maritime sector is explained in Duan and Zhang. 21 Apart from defense sector, drones are even used in hobbyist circuits. Manufacturing of UAVs has impacted the economy, as many start-ups popped up with technology and ideas to integrate with UAVs. Clearpath Robotics is one such start-up to manufacture UAVs and unmanned ground vehicles (UGVs) for the US Army and other defense-related departments like the US Navy and the US Department of Defense. Google’s Loon project is an example that used AirBSs for wireless connectivity. Network service operators like AT&T and Qualcomm had attempted to integrate UAVs with the 5G cellular networks.
Future use cases where drones can serve include firefighting, delivery of medical supplies, search and rescue, data collection and crop management in agricultural field, radiological sensing, environment and atmosphere sensing, humanitarian operations, natural resources conservation and management, weather forecasting, and in extending Internet connectivity in rural and remote areas.41–46 Drone program organized by the United Nations International Children’s Emergency Fund (UNICEF) depicts the practical depiction of UAVs in humanitarian acts, such as vaccine delivery, aerial imaging for improved preparation in emergency cases, and providing connectivity in hard-to-reach communities. 41
Relevant surveys and contributions
The opportunities and applications that have emerged with the development in the drone technology have been the topic of research interest in the current decade. Apart from the applications posed by UAVs, there are some challenges too. Optimal 3D placement, channel modeling, energy limitation, constraints in flight time, trajectory path planning, interference management, backhaul connectivity, and security and privacy issues are the most talked challenges in the UAV-enabled wireless networks. The works of Zhang et al., 4 Duan and Zhang, 21 Ribeiro et al., 22 Wang et al., 23 Campos et al., 25 Wei et al., 26 Zhou et al., 27 Saarnisaari et al., 28 Li et al., 29 Liu et al., 30 Wang et al., 31 Huo et al., 32 Wei et al., 33 Kim et al., 34 Jo and Shim, 35 Yau et al., 36 Teixeira et al., 37 Li et al., 38 and Yang et al. 39 focused on the incorporation of UAVs on the maritime sector, to improve the coverage and QoS. Wang et al. 24 introduced an optimal placement method to keep aerial wireless BSs, in regions where the terrestrial cellular network is malfunctioning.
This article comprises the application use cases of UAVs in areas of wireless communications including 5G, IoT, maritime communication as AirBSs, AI, optimization techniques, and related cyber-attacks toward UAV networks. Besides, the aforementioned areas, UAVs can enhance the performance of IoT-led applications, where they can take the role as UE and as AirBS. Literature review had given prime focus on deployment, channel modeling, performance analysis, resource management, resource allocation, and path planning. Previous surveys focus on cellular wireless, IoT, and vehicular technology use cases, whereas equal priority is given for maritime communication along with wireless, IoT, and 5G applications in this work. The latest usage of UAVs in socially relevant programs is already discussed in section “Industrial relevance, standards, and projects.”
To design the UAV models, UAV simulators are used. UAV simulators help in modeling of UAV aerodynamics, control systems, and their function aspects. ArduPilot and PX4 are open-source autopilot simulators. 3DR Solo is a commercial vehicle built with use of the ArduPilot simulator. ArduPilot is supported by many platforms and hardware, like Pixhawk, NAVIO, and Erle-Brain. XPlane-10 and RealFlight are AduPilot-based simulators that focus on motion control and navigation. FlyNetSim is one among the simplest simulators, which is developed by the combination of ArduPilot and Software-In-The-Loop. 111 Furthermore, UAV network research simulations can be carried out in wide range of platforms, namely, OMNET++, Python, ns-3, MATLAB, and so on.
Maritime communication
Maritime activities are moving toward a smart ocean era. Communication in the marine area is supported by MCN which manly comprises of onshore base stations and satellites. Limited transmission rate and narrow coverage are the challenges faced by MCN. This can be overcome by enhancing the coverage area with the deployment of UAVs to boost up the signal coverage and signal power. 23 To understand the effects of dynamic channel in the communication, it is necessary to develop a channel model. A novel channel model for the MCN is introduced in Liu et al. 3 UAVs act as the transmitters and the ships or vessels act as the receivers of the communication network related to offshore activities, as shown in Figure 3. Most of the research is focused on the development of hybrid Satellite–UAV–Terrestrial network, channel models, UAV-assisted mobile relay communication, and its applications. 21 Some of the prominent works on MCN is tabulated in Table 7. Multi-rotor UAVs constitute a UAV type used in the maritime sector, as these UAVs possess the capability to hover over a particular location. Different types of multi-rotors with their payload capacity and battery time are shown in Table 8. Devices onboard receive connectivity from satellites via ship-borne BSs. Ship-borne BSs can relay information to the vessels sailing nearby lanes. Some ships that are left alone are attended by the drones, thereby extending the signal coverage for the marines. AirBS can pass on information to the shore BS and can receive from shore BS.

Exploiting onshore satellites to extend the maritime coverage. 26
Related works on MCN.

UAV: unmanned aerial vehicle; MCN: maritime communication network; DF: decode-and-forward.
Multi-rotor models with battery time. 112

UAV: unmanned aerial vehicle.
Hybrid satellite–UAV–terrestrial network
Hybrid model blends the advantages of terrestrial onshore BSs, onboard BSs, and AirBSs along with the support of satellites. Global coverage is achieved with the help of satellites, along with onshore BSs. Also, there will be BSs deployed in ships/vessels, that will support other services. In practice, there will be regions where the signal coverage is zero, such regions are called blind spots. Coverage can be extended to blind spots by sending UAVs designed to act as BSs. Communication links exist between BSs in the vessels (V), shore (S), and UAVs (U). Communications between these three entities are represented as shore-to-vessel (S2V), shore-to-UAV (S2U), vessel-to-UAV (V2U), UAV-to-UAV (U2U), UAV-to-vessel (U2V), and vessel-to-vessel (V2V) links.23–26 This is shown in Figure 4, which illustrates a basic hybrid network functioning.

Illustration of a maritime hybrid network with S2V, S2U, V2U, U2U, U2V, and V2V links. 23
An MCN is widespread through shore-based MCN, satellite-based MCN, island-based MCN, vessel-based MCN, and air-based MCN. Signal transmission is susceptible to sea state and weather conditions, and coverage is restricted by the geographical location BSs. The challenges being faced in the implementation of an MCN are among else related to temperature, humidity, wind speed, scattering, specular reflection, wind movement including tides and turbulence, and atmospheric scattering, which constitute the prime factors that deteriorate the quality of transmit–receive link. Due to atmospheric refraction, signal traverse will happen in different paths, and based on the level of refraction, signal paths are named as sub-refraction, standard refraction, super refraction, and evaporated duct propagation. 26
Low energy efficiency that results from long-distance transmission can be combated with Internet of vessels concept. Effect of sea and weather conditions affecting the communication system can be reduced by improving the transmission efficiency. Transmission efficiency can be improved by proper selection channel models, by reducing transmission loss, and by optimizing the resource management and allocation.
In a hybrid satellite–UAV network, the most challenging part is joint link scheduling and rate adaptation as there are many data links between the different participating entities. 23 This can be considered as a non-deterministic polynomial-time (NP)-hard mixed integer non-linear programming problem. The vessels can receive signal from a BS in the shore or from the aerial drones carrying BSs. In case, where the vessels are too far to receive signal from onshore BSs, the UAVs will act as relays and transmit signal to the vessels and the user devices onboard are served with good QoS. These ships must follow a particular sailing path, and it is fixed based on the contract they have applied with the shipping authorities. So, the travel path is deterministic and not random in nature, as the case of user devices in the terrestrial cellular network. Some vessels would be out of coverage from the shore BS and UAVs, those can be helped by other vessels acting as relays. Communication happens with orthogonal sub-carriers, where each sub-carrier is divided again into time slots.
The link quality is measured by computing the gain between the transmitter and receiver for a particular time slot and selecting the best link. Gain can be evaluated as given in Al-Hourani et al. 40 Wang et al. 23 developed a hybrid model with min–max transformation for joint link scheduling and rate adaptation. The work showed that the data volume received by the vessels has increased to 160 Mbits from 60 Mbits, by optimization. QoS can touch newer height by optimizing the trajectory and online dynamic adjustment.
Channel modeling
Channel modeling in the maritime network is tedious when compared with land-based channel models. Marine network comprises a land-sea-air-space model as the communication channel is spread over sea, land, air, and space. 3 Factors from all these four domains have an impact on the link quality, so it is essential to develop new channel models for high-speed, reliable communications. The works in Khawaja et al., 47 Wang et al. 48 and Xia et al. 49 focus on channel models. Duct propagation greatly influence the ray paths between the ships and BSs. Authors in Khawaja et al. 47 developed a ray-tracing model, whereas the Wang et al. 48 was a modified version of ray-tracing model incorporating channel scattering function. The sea surface communication between the drones and the ships can be modeled with finite difference time domain (FDTD). Single cluster model, birth death process, twin cluster model along with wave equations were used to model the channel in Xia et al., 49 thereby considering the effects of small-scale fading, wind directions, scatterings, and multi-mobility.
Atmospheric refractions result in waveguide effect in maritime scenario, and this modeled with twin cluster model. Surface, elevated, and evaporated ducts are the examples. Elevated ducts happen around 600–3000 m, and greatly influence the communication to the ships over sea. Evaporated ducts are seen below 40 m from sea surface. For accurate modeling of the maritime channel, waveguide models must be studied and incorporated to the design. 50 A mesh network model is provided in Zhou et al. 27 for low-cost high-speed communication with UAVs.
Fifth generation cellular networks
The technology has faced a sharp lift, by the collaboration of fifth generation wireless networks with AirBSs or as cellular-connected UEs. Fifth generation networks play an important role in enabling enhanced mobile broadband, URLLC, and mMTCs. Application and use cases of 5G networks are available in Qualcomm. 106 An extensive survey on the role of UAVs in 5G networks is done in Mozaffari et al. 56 and Wu et al. 57 UAVs are used in public safety scenario, to enhance the coverage and capacity, with 3D beamforming, as ad hoc networks and with IoT communication. In places where the terrestrial networks are damaged by some natural disaster can create hurdles in rescue operations. In such cases, trying to resolve the terrestrial communication system is tedious, where UAVs as AirBSs can reach any hard-to-reach location irrespective of its geography and terrain can help in the rescue and pave the way for emergency communication. UAVs along with 3D beamforming can create separate radiation beams for different user devices. 56
Although 5G-UAV networks have countless applications, the challenges to attain the merits come in the areas of UAV deployment, network planning, resource allocation, flight time constraints, path planning, channel modeling, and trajectory optimization. Works related to UAV-enabled 5G networks are tabulated in Table 9. Each of these challenges can be considered for exhaustive research. Let it be any application, the very first step is related to the optimal placement of the UAV as an AirBS. Although the energy efficiency is improved, the clustering radius was not optimum, and it resulted in large number of clusters.
Works related to UAV-enabled 5G networks.
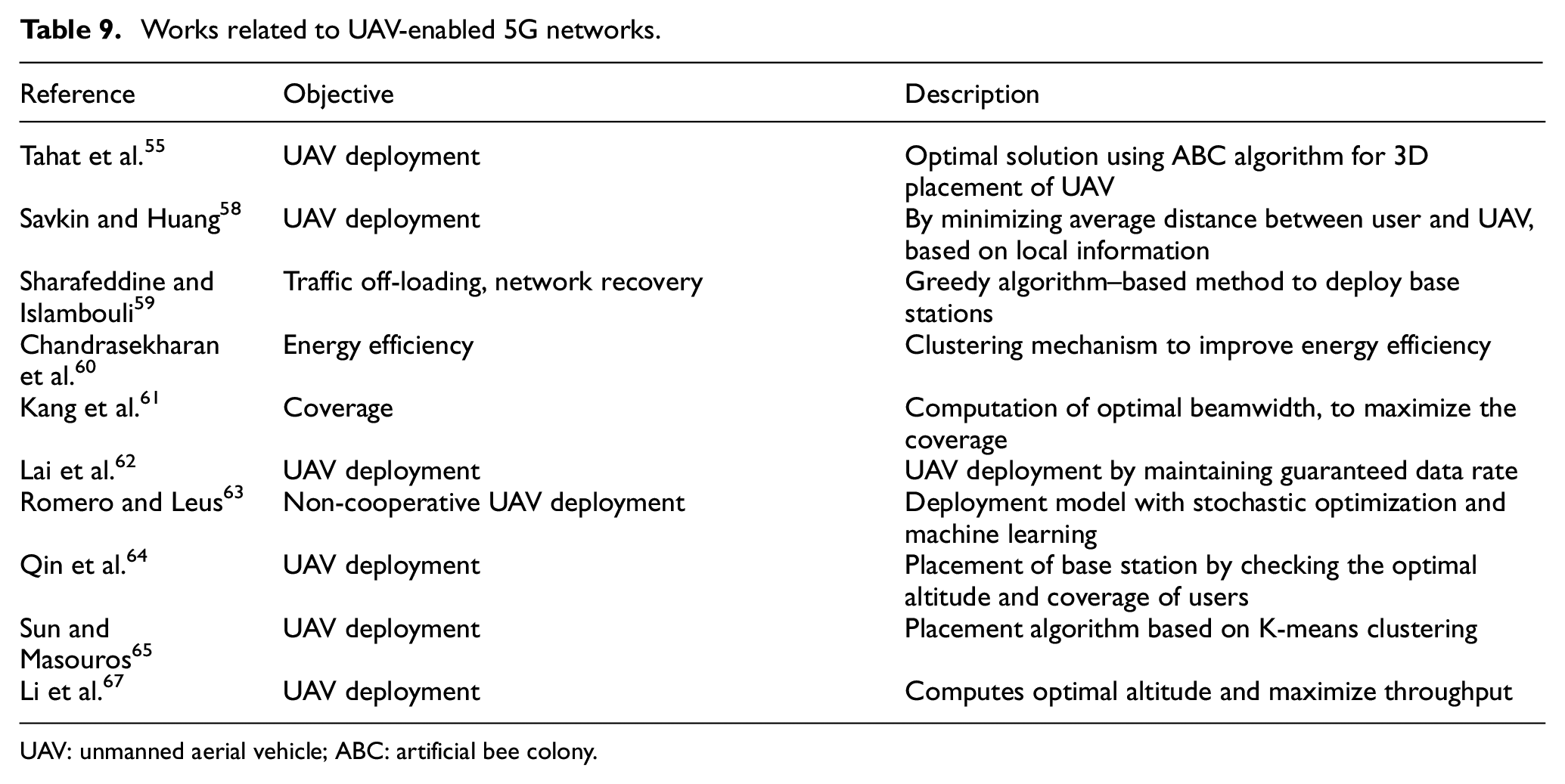
UAV: unmanned aerial vehicle; ABC: artificial bee colony.
UAV deployment
Proper placing of the UAV BSs affects the outcome of the communication system. Deployment of UAVs is a function of three coordinates resulting it as a 3D problem. Tahat et al., 55 Savkin and Huang, 58 Sharafeddine and Islambouli, 59 Chandrasekharan et al., 60 Kang et al., 61 Lai et al., 62 Romero and Leus, 63 Qin et al., 64 Sun and Masouros, 65 Zhai et al., 66 and Li et al. 67 have looked deeply into strategizing the deployment of AirBSs for the cellular network. An optimal placement algorithm based on ABC algorithm is discussed in Tahat et al. 55 and considered it as a non-convex problem. During occasional events like sports, presidential ceremony, or festive events, there would be a large spike in the user density and the existing terrestrial network will get exhausted because of its bandwidth constraints. Deployment of UAVs is very beneficial in such cases. The work of Savkin and Huang 58 deals with the performance analysis of UAVs when deployed to serve the high user density during events. In this work, the BSs are placed such the maximum number of users are served, and the results were based on real-time data set from Momo app and Voronoi cells.
When the user count surge beyond a limit, the cellular network services will get affected negatively and may result in a network breakdown. Sharafeddine and Islambouli 59 have proposed a Force3D algorithm for traffic off-loading and network recovery. Force3D algorithm check for the outage probability, and if it is beyond the limit, then extra UAVs are launched to avoid network congestion. Initially, the number of UAVs to be deployed is decided based on the ratio of total number of users to the number of users served by one BS. If outage is within the limits, the best possible height is computed by comparing the average rate of the users. 59 Some related work on deployment of BSs is given in Table 10.
Existing works on UAV deployment.
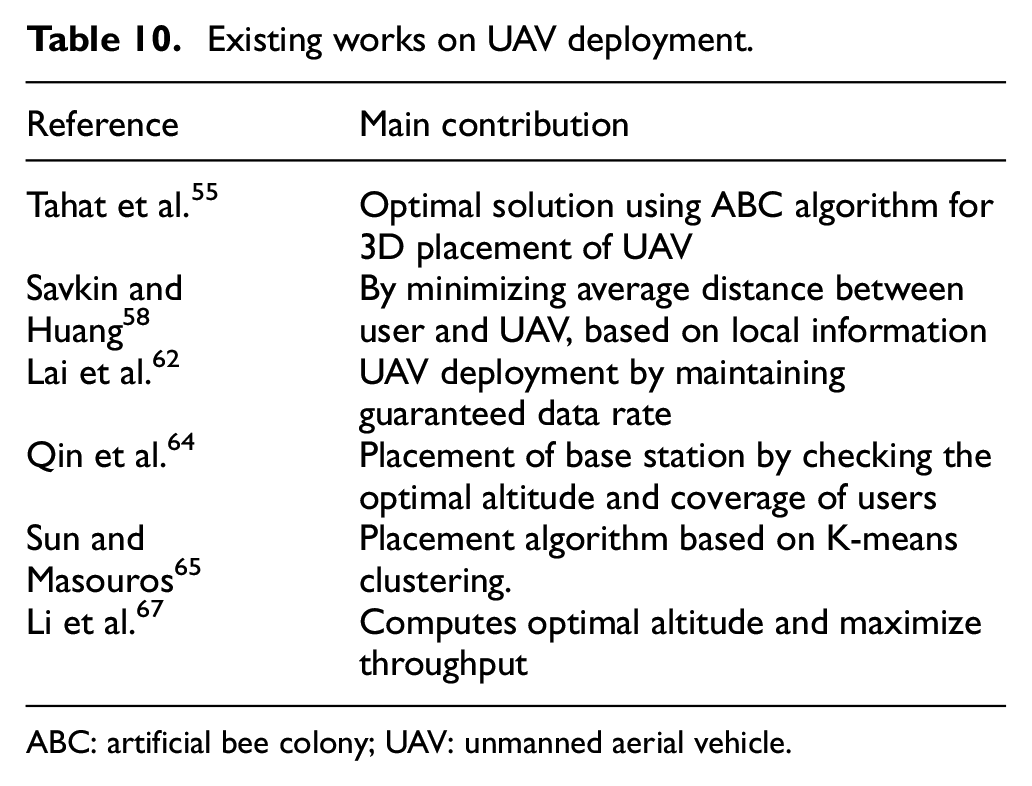
ABC: artificial bee colony; UAV: unmanned aerial vehicle.
To improve the energy efficiency of the UAV-assisted communication, clustering techniques are used. Clustering approach in Chandrasekharan et al. 60 attains a higher energy efficiency compared to non-clustering algorithm and hybrid energy efficient distributed (HEED) algorithm. Performance can be even improved by utilizing the directional properties of the antenna. If UAV antenna has a beamwidth of 18 degrees, the work of Kang et al. 61 shows it results in maximum coverage for an altitude 230 m. Although most of the previous works focused to maximize the coverage, maintain the data rate for the users lacked much research. Lai et al. 62 proposed a density aware algorithm that will result QoS by attaining a minimum data rate for all users based on their service demands. The proposed method is based on GA and considered the placement of BSs as a knapsack-like problem. For the efficient operation, the transmission from each UAV needs to be coordinated. A non-cooperative method in a decentralized manner is studied in Romero and Leus. 63 Stochastic optimization techniques along with machine learning are used to obtain the optimal locations for antenna placements. To maximize the coverage and to minimize the number of AirBSs, the work of Qin et al. 64 made use of an edge-prior placement algorithm.
Performance of UAV-based wireless networks is closely related to deployment of AirBSs. Deployment of UAVs can be optimized based on different network utility factors, and its performance can be studied with respect to various parameters related to geography and network connectivity as listed as follows: (1) altitude, (2) traffic pattern, (3) complexity of placement algorithm, (4) coverage, (5) bit error rate, (6) interference, (7) energy efficiency, (8) capacity, (9) latency, and (10) transit time.
Practically, it is complex to find an optimal location for antenna deployment by considering all the above-mentioned 10 parameters. One may have to apply joint optimization methods to optimize more than parameter. Mathematically, it is quite tedious, and as a result, most of the research works focused any few of these parameters.
Optimum altitude
Determining the optimum altitude at which the AirBSs to be deployed is gaining much attraction in the recent research works. Figure 5 shows the optimum altitude level for an aerial drone. Optimum height refers to the altitude level at which the AirBS is deployed with respect to the ground level. Deployment problem of AirBSs is a 3D problem, hence along with determining the optimum (x,y) coordinates, it is necessary to determine optimum altitude. Depending on the altitude, the received signal strength will vary. Drones placed at low altitudes are easy to install, but they face severe shadowing effects. On the other hand, although shadowing effects are avoided when deploying the AirBS at high altitude, path loss effects rise. Hence, it is important to find an optimum altitude for the installation of AirBS. The work of Chandrasekharan et al. 60 shows that an altitude of 230 m gives optimum results if the system makes use of directional antennas. Nakagami fading with parameter m = 3 was assumed for the analysis. Rather than keeping all the AirBSs at a fixed altitude, varying altitudes can be considered as future scope for the research in these areas. Flying the AirBSs requires special permit from the concerned authorities. Many countries have specified the maximum height; the UAVs can float without special permit are provided in Fotouhi et al. 68 Computing an optimum height that will give maximum coverage to users is a sought-after topic.

Optimum altitude for base station deployment.
Resource allocation trajectory optimization
Even though the UAVs support the cellular network, UAV-based communication also suffers from restricted bandwidth availability. Hence, optimization techniques can be applied for resource management. For maximizing the available resources, optimization in resource allocation must be applied, and thus resulting in energy efficient network models.
Resource allocation for mobile edge computing (MEC) is provided in Cai et al., 69 where the optimization problem corresponds to non-convex fractional programming, and the Dinkelbach algorithm and the successive convex approximation (SCA) technique are adopted to solve it. MEC makes use of the resources available at the edge devices. Resource and trajectory optimization for the downlink is the main study in Li et al. 70 Signal link from the ground device/user to the UAV is called the uplink, and the link from UAV to the device/user in the ground region is called the downlink. Joint optimization of resource and trajectory is a non-convex optimization problem.113,114
Path planning
UAVs are energy limited devices, and hence, the flight time is dependent on the energy available with UAVs. A wise planning on the path the UAV has to fly will greatly reduce the unwanted energy wastage. 71 Path length refers to the distance between source and destination. Jun and D’Andrea, 72 Cabreira et al., 73 and Torres et al. 74 studied the path planning of UAVs. Planning must be performed in such manner, so that the path length is minimized. As the travel distance is minimized, the energy consumption also reduces and the drone can fly for a longer time for the task, it is supposed to be done. Ant colony optimization (ACO) techniques can be used to find the optimum path for multiple UAVs. 115 Path planning is crucial in UAV communication system to identify the optimal path with the shortest distance, it must also ensure collision free movement of UAVs. 116 Path planning must be performed with shortest time as possible; as a result, fast deployment of UAVs makes possible. Autonomy in UAVs refers to the state of giving UAV the capability to take decisions on itself regarding path planning, task allocation, trajectory planning, and task scheduling. Ten levels are there in developing and modeling an autonomous system. Autonomous control levels as described in Sholes 116 from level 0 to level 10 are remotely piloted vehicle, execute pre-planned mission, changeable mission, robust response to real-time events, event adaptive vehicle, real-time multi-vehicle coordination, multi-vehicle cooperation, battlespace knowledge, battlespace single cognizance, battlespace swarm cognizance, and fully autonomous, respectively.
Path planning algorithms 117 must be economical, reduced collisions, less planning time, energy efficient, and robust. Designers will choose the path planning algorithm that is robust, energy efficient, time efficient, cost efficient, minimum path length, and collision avoidance capability. Path planning algorithms can be optimal, sub-optimal, and non-optimal. 117 Communication protocol used in UAV system are medium access control (MAC) layer, physical layer, network layer, and application layer. An adaptive MAC protocol is suitable for UAV data sharing that can support bidirectional communication and UAVs altitude. UAV path planning includes representation of UAV in 3D environment and map creation based on the environment configuration.
Representation techniques can be sampling-based or AI-based, coordinated, and non-coordinated techniques. Sampling-based techniques are based on c-space that includes Voronoi diagram, cell decomposition, potential fields, and roadmaps. Probabilistic roadmaps, rapidly exploring random trees (RRT), and A* algorithms are sub-classifications of roadmaps. RRT method is the fastest method, while probabilistic roadmap method is cost efficient. 118 Voronoi diagram is also a type of roadmaps. Heuristic search techniques, local search techniques, brute force search techniques, and artificial neural networks enable AI-based path planning. 117 Machine learning model is an example of AI-based planning, which can be categorized into supervised learning, unsupervised learning, and reinforcement learning.
Linear programming, probabilistic methods, control theory, metaheuristic method, bio-inspired evolutionary techniques, machine learning models and multiple objective optimization methods like convex optimization, and two echelon optimizations are examples for coordinated-type path planning techniques. Topological graph, the Floyd algorithm, ACO, and circular digraph which are graph search techniques are some common non-coordinated methods in path planning. 117
Channel modeling network planning
Every mode of communication involves a transmitter, receiver, and channel. Based on the channel quality, the recipient will get different signal power level, whereas if the channel is noisome, the receiver may take longer amount of time to decode the signal properly. When the channel is ideal, decoding process of received signal is simple (e.g. hard thresholding). Planning the network includes assigning the cell, allocating frequency bands, interference mitigation, signaling, positioning of BS, and traffic estimation. Network planning is the backbone for efficient and reliable wireless communication network. 56 Network planning is widespread research area ranging from user association till rate achievement. Sharma et al. 119 proposed a channel enhancement model for heterogeneous cellular network with UAVs. Optimal deployment always focused to reduce the transmit power. Mozaffari et al. 120 developed a model that did cell association by reducing the transmit power. A delay optimal planning is done in Mozaffari et al., 121 whereas Lagum et al. 122 proposed a model for the scenarios where there are multiple UAVs in the network for the communication. Backhaul connectivity is implemented with well-known technologies like LTE and millimeter wave technology. 123
In cellular-related UAV-to-ground modeling, the environment may vary, for example, urban, sub-urban, rural, and dense urban. The number of buildings per kilometer is known as the building density. Different channel models are used to study the effect of environment on communication links. The Rayleigh channel model, the Rician channel, path loss model, the Hata model, the Okumura model, empirical models, air-to-ground models, and space–air–ground–sea models are some of the examples. In the air-to-ground channel model, an LOS signal and a non-line-of-sight (NLOS) signal are typically considered. The LOS probability between UAV and the ground user depends on the environment, the building density, and the relative heights.
IoT
With the development of technology, IoT is a booming word. IoT refers to the environment where the devices are connected to Internet and can be controlled by Internet. When 5G wireless cellular system utilized the UAV as an AirBS, the counter UAV as UE is more welcoming in IoT applications. Device-to-device communication, vehicle-to-vehicle communication, smart cities, smart homes, are few to be named as the developments emerged by IoT. 121 The mMTCs constitute a subset of the IoT integration with aerial vehicles. UAVs have immense use cases with IoT collaboration. This section deals with applications that have emerged with the collaborative development of IoT and UAVs. Table 11 shows the different applications where UAVs operate as UEs beyond the standard wireless network applications.
Applications and domains.

UAV: unmanned aerial vehicle; UNICEF: United Nations International Children’s Emergency Fund.
MMTC
Industrial IoT consists of heterogeneous devices and Internet connectivity needs to be provided for the devices in the network. 52 mMTCs deal with the study of enabling the connectivity to all these connected millions of devices. Wireless fidelity (Wi-Fi), Bluetooth, and Zigbee are the examples for the technologies that allow the massive number of devices to get access into the wireless network connectivity. Comparison of the three common technologies is provided in Table 12. Reliability, connectivity, efficiency, and latency are the key parameters to be investigated while implementing the machine-type communication.
Comparison of Wi-Fi, Bluetooth, and Zigbee.

Crowd surveillance 75 with UAVs is possible. For crowd surveillance, the drones are equipped with IoT devices. UAVs are equipped with cameras, Wi-Fi, 4G/5G, radio-frequency identification (RFID), sensors, Global Positioning System (GPS), or any sort of data measuring devices for the data collection UAVs are an inevitable element in data collection, where the humans find difficult to reach. Data collection for the research based on the Amazon forest can be done with drones. For IoT applications, high-speed connectivity is must. Combining the UAV technology with emerging non-orthogonal multiple access (NOMA) seems to provide high-capacity uplink connections. 76
Most IoT devices are power limited; thus, it is important to reduce the power consumption, so that the UAVs carrying these IoT device can fly more. Efficiency can be improved by reducing the transmit power. Transmit power technologies helps in increasing efficiency and in turn the UAVs can collect more data as they can hover for longer time. Power allocation is done by calculating the SNR. Resource allocation and optimization methods for UAVs for high-speed uplink data transmission are studied in Duan et al., 76 Li et al., 77 Tran et al., 78 and Khalili et al. 79 As the number of devices in the networks increases, intruder threats may also arise. Sun et al. 80 have developed a model for secure communication.
As the number of UAVs deployed are multitude in number, it is important to investigate green UAV communications to reduce the energy consumption and resources wastage. Green UAV communication can be achieved by utilizing mobility, improved energy consumption models to accurate measure the power utilization, directional transmission, making use of renewable energy, new technology or methods to prolong UAVs lifespan, and use of intelligent reconfigurable surfaces. 124 Research in green UAV communication will lead to sustainable development in technology.
Integration with AI
Integrating AI with UAVs helps in fast deployment of AirBSs compared to the traditional cellular planning techniques. Edge intelligence and AI-empowered wireless communication81–83 are the two emerging areas by the collaboration of wireless networks with AI. AI in wireless communication is incorporated by infusing machine learning techniques into the design paradigms. The research works of Bayerlein et al., 84 Huang et al., 85 Bayerlein et al., 86 Liu et al.,87,88 Wang et al., 89 Mahmud et al., 90 Luong et al., 91 Mou et al., 92 and Yan et al. 93 had focused on reinforcement learning with next generation wireless communication.
UAV networks are more vulnerable to jamming attacks than vehicle ad hoc and mobile ad hoc networks. Wang et al. 89 have proposed a reinforcement model to tackle the jammers in the networks. The model consists of UAV source, UAV as relay, and UAV receiver. The relay UAV will send some fake signals to confuse the intruder (jammer) in the network. Here, the energy efficiency is improved by controlling the transmit power of UAVs. Reinforcement learning for UAV-NOMA network is studied in Mahmud et al. 90 Sum-rate and bit error rate were analyzed for the framework. Resource allocation in UAV networks needs to be done carefully. A reinforcement learning method for resource allocation is investigated by Luong et al. 91 Mou et al. 92 studied an RL-based method for improving coverage, whereas the collision avoidance of UAVs was the topic of study in Yan et al. 93
To improve the capacity, power efficiency, coverage, and for the efficient utilization of the available spectrum, optimization of the constraints is must. As reflected in Table 13, the more devices participate in a network, such as in the case of mMTC, the higher the security concerns. Security of data can be improved by implementing steganography, cryptography, or even by jamming the intruders with the help of a jammer. Section “Optimization techniques” deals with the techniques that can be implemented to optimize the performance parameters. Combining the merits of cloud-edge-device network with UAVs is one promising future to delve into.
Unmanned aerial vehicle opportunities challenges.

LOS: line of sight; V2V: vessel-to-vessel; NOMA: non-orthogonal multiple access; MIMO: multi-input multi-output.
Networked UAVs and cyber-attacks
Integration of UAVs with AI, IoT, and wireless networks has increased their vulnerability to cyber-attacks.89,125–129 Possible cyber-attacks to be tackled by a UAV communication network are message forgery, path variation, data modification, GPS spoofing, UAV spoofing, UAV hijack, virus and malware attack, DDoS attacks, jamming, and routing attacks. 125 Countermeasures are taken through the deployment of intrusion detection systems (IDSs). Data security can be attained by introducing encryption/decryption techniques. Jamming techniques can also make a UAV resilient to cyber-attacks, by jamming the intruder systems. Spoofing refers to input data manipulation for malicious purposes. A cyber-physical system that satisfies linear temporal logic in the presence of adversaries tested via UAV simulation is developed in McCoy and Rawat. 127
Node configuration restoration can mitigate UAV spoofing attacks. Such an algorithm can protect the network controller from saturation and cache misses attacks. It helps the system to handle spoofing attacks efficiently, under the condition that the attack definition must be known. A GPS position finder algorithm can reduce the network congestion by load balancing on UAV nodes, thereby mitigating GPS spoofing attack. The affected network is restored back within the shortest time span by identifying the accurate position of actively deployed devices, hence, improving communication performance. Network management protocols and network parameter analysis area also effective against jamming attacks. A network parameter analysis method can efficiently mitigate jamming attacks. Although this model provides fault free services, it does not exhibit protocol flexibility. Its main downside is that this model only works well with known attack types, whereas network management protocols can impose network resiliency. On the positive side, network energy resources utilization is enhanced with the adoption of this protocol model. In overall, end-to-end outage rate in wireless communication networks can be reduced with the help of management protocols. 128
IDSs can be placed on a UAV or can be executed from the ground control station. Security levels are measured based on message integrity, confidentiality, authenticity, and device availability. Different mechanisms are employed in UAV IDSs as tabulated in Table 14. Intrusions can be detected on-site or off-site. On-site detection, also known as dynamic detection, occurs when the intrusion is detected through the real-time data collected from on-site UAVs. Static or off-site detection is conducted based on the data received from all the information sources available to the IDS and the detection output is released after data analysis. Information is gathered from payload (such as sensor data), communication links, the ground control station, and from UAV components.
Intrusion detection system.

UAV: unmanned aerial vehicle.
UAV swarms are sets of drones designed to execute a specific task in an unattended or hostile environment. UAV swarms are susceptible to damages, thereby degrading performance and connectivity. Lykou et al. 129 and Abdelkader et al. 130 introduce an ad hoc model to recover the UAV swarms from attacks. A swarm intelligence damage resilient (SIDR) model restores a swarm network back to unified form in three phases, namely, the well-work phases, damage identification phase, and network aggregation phase. The storage capability of the swarm is utilized in the first phase, where each node memorizes the network paths, structure, and configuration. It is noted that swarm nodes travel in a unified direction and speed. The damage identification phase is leaded by the master node that is in control of the swarm network. The master node analyzes and supervises the network to identify any damage or attack. If damage is identified, network recovery is initiated. The flying behavior of subnets is controlled by the corresponding subnet master nodes. Once the network aggregation phase is over, the network re-enters the well-work phase. 129 Counter-drone technologies are also developed to protect the airports from intentional aerial attacks to disrupt the socio-economic situation. Abdelkader et al. 130 conducted an exhaustive survey on cyber-attacks and counter-drone technologies to re-coupe from such attacks.
Optimization techniques
Although performance parameters vary from one domain to another, the main objective of researchers in the domain of wireless communication is to improve the existing hardware or software models. As discussed in section “Fifth generation cellular networks,” there are many key factors that can be investigated. As one parameter is improved, if the other key factors are affected, then the efficacy of the entire system will be affected. So, it is essential to find a solution, such that most of the key parameter values are balanced resulting in efficient system output. Optimization techniques are needed to achieve this. Optimization problem deals with minimizing or maximizing a function based on design constraints. The complexity of the solution computation depends on the optimization problems. Optimization problems like least square, convex optimization, and linear programming problems are the easiest types of problems. 131 This section explains few of the optimization algorithms that can be used to obtain optimized results in UAV applications. Research problems such as small-scale fading, air-to-ground path loss, and air-to-air channel modeling can be evaluated with ray-tracing techniques and machine learning. Coverage enhancement and maximization by optimum deployment of UAVs can be achieved by ABC algorithm, GA, PSO, and stochastic optimization. Machine learning optimization techniques can be applied to optimize the resource allocation, UAV deployment, resource management, and energy efficiency. Greedy algorithm technique is best suited for drone association, positioning, and deployment problems.
Classification types
Optimization algorithms are broadly classified into two: deterministic and stochastic. Stochastic optimization techniques are used in UAV deployment research problems, performance analysis under mobility consideration, and URLLC and control. Linear programming, non-linear programming, gradient-based, and gradient-free are examples for deterministic optimization algorithms. Simplex method in linear programming is deterministic. When gradient information is utilized in deterministic optimization, they are termed as gradient-based. The Newton–Raphson method is an example for gradient-based. Optimization algorithms can be based on conventional approaches and machine learning-based. Conventional optimization algorithms can be broadly classified in heuristic and metaheuristic. Heuristic and metaheuristic algorithms are a class of stochastic algorithms. Metaheuristic optimization algorithms are sub-classified as algorithms based on swarm intelligence, trajectory-based, and evolutionary-based. Heuristic algorithms make use of a trial-and-error–based learning and adaptation technique. Although heuristic algorithms cannot find the best solution, they aim to reach at an optimum solution as possible. Successive convex approximation, circle parking theory, block coordinate descent, and dinkelbacks methods are examples for heuristic optimization algorithms. 131 Whereas metaheuristics-based algorithms perform well even for tough optimization problems. Both these algorithms are inspired by the evolutionary behavior of nature. 131 Mostly used metaheuristic algorithms are PSO, ACO, firefly algorithm, ABC algorithm, GA, and simulated annealing and variable neighborhood search algorithm. Variable neighborhood search algorithm and simulated annealing are examples for trajectory-based metaheuristic optimization algorithm. All the above-mentioned optimization techniques are used in UAV applications.
Optimization algorithms are formed in a way that it can solve the problem within a stipulated time. However, for complex optimization problems, heuristic algorithms time requirement may increase exponentially with respect to the problem size. 131 Optimization techniques performance can vary from one application scenario to another. Figure 6 depicts the main mathematical schemes available for UAV deployment, analysis, and optimum design of UAV-enabled communication systems. Optimization techniques are not at all limited to the algorithms in Figure 6. Many other algorithms are also available, but we have considered only the commonly used optimization techniques in UAV deployment. Most of the algorithms marked in Figure 6 are metaheuristic algorithms. 132

Commonly used optimization techniques for AirBS deployment.
Optimization problems also vary in nature from one another. Optimization problems can be classified based on objective, constraints, landscape, function form, determinacy, and based on variables/responses. 132 Objectives of an optimization problem can be single objective or multi-objective. Multi-objective is also termed as multi-criteria optimization. Based on constraints, optimization problems can be constrained or unconstrained. Based on shape, the optimization problem can be unimodal or multi-modal. The optimization problem is said to be unimodal, when there is only a single valley or peak with a unique global optimum. Convex optimization is a class of unimodal optimization. The design variables can be discrete, continuous, and mixed. If the optimization problem consists of both discrete and continuous, such problems come under the category of mixed variable. Discrete optimization refers to optimization technique where the values of all design variables are discrete. If the design variables hold integer value, it is referred as integer programming problem. 132 Objective functions can be either linear or non-linear. When the objective functions and constraints are linear in nature, it represents a linear programming optimization problem. Non-linear optimization deals with optimization problems where the constraints and functions are non-linear.
Discrete optimization aka combinatorial optimization is the most popular optimization type. Knapsack problem, traveling salesman problem, vehicle routing, minimum spanning tree problem, and airline scheduling are examples for combinatorial optimization problems. If all the design variables take real values in interval or continuous in nature, then it is called continuous optimization problem. Based on the uncertainty in parameter values or noise, the optimization techniques can be classified as deterministic and stochastic. In deterministic, the parameter values are exact and there is no uncertainty or noise level. With a level of uncertainty and noise level, the optimization techniques are called stochastic optimization. For channel modeling, ray-tracing and machine learning methods are used. In order to address research problems on UAV deployment, centralized optimization theory and facility theory are frequently used. Probability theory, stochastic theory, and information theory are used for performance analysis. Cellular network planning with UAVs can be done with centralized optimization theory, facility location theory, and optimal transport theory. Resource management and energy efficiency problems can be well addressed with centralized optimization theory, optimal transport theory, game theory, and machine learning. For path planning and trajectory optimization, optimization techniques used are centralized optimization theory and machine learning. Research problems in cellular-connected UAV-UE can be optimized with centralized optimization theory, machine learning, game theory, stochastic geometry, and optimal transport theory.
ABC algorithm
ABC algorithm is analogous to the bee collection strategy of honeybees. According to it, there are many food sources and the food positions keep changing. Bee colony consists of three types of bees, namely, onlooker bees, employed bees, and scout bees. The number of employed bees depends on the number of food sources available. The employed bees will find the food sources and dance there. Onlooker bees check for employed bees and extract the honey from the food sources pinpointed by employed bees. A scout bee is an employed bee whose food source is abandoned. Initially, food sources are available to all employed bees, then each employed bee will find the nearest food source. Then, the onlookers will select any of the sources and measure the nectar amount. Abandoned food sources are replaced with new food sources as discovered by scouts. The best food source is then registered. 94 The ABC algorithm applied in BS deployment is studied in Tahat et al., 55 Li et al., 67 Karaboga and Basturk, 94 and Zhang et al. 95 By enhancing the coverage and maximizing the users served, the UAV deployment can be optimized via the ABC algorithm. The work of Tahat et al. 55 discusses the UAV-BS 3D deployment problem. The ABC algorithm outputs a global optimum. It finds a local solution first and that solution is then updated so that it reaches a global optimum. That global optimum value will give the optimal position for UAV placement. Zhang et al. 95 discussed 3D deployment of UAV-BS with minimum number of UAVs to serve the users. An ABC-based user clustering algorithm was used. Although the paper presents good results with deployment, the work must be further expanded to scale to a larger area and a greater number of users.
Genetic algorithm
GA is an example for metaheuristic optimization, useful in obtaining optimized solutions based on the process of biological evolution. The algorithm is analogous to the biological genetic processes like mutation, crossover, and selection. This results in many solutions. The “bad” solutions are dropped out in each generation step and only the “good” ones are considered in the solution set for the next iteration. Likewise, as the generations evolve only the best from the solutions set get passed to the final step. The best solution is chosen out of all the obtained solutions. The GA process involves the entities of chromosomes and genes. Each chromosome consists of many genes. The processing steps begin by randomly selecting the chromosomes and computing the fitness function. At every generation, chromosomes are chosen, and genetic processes, such as mutation, crossover, and selection take place to generate better chromosomes for the next generation. 131 Initiation, selection, genetic operators, heuristics, and termination are the steps involved.96,97 An optimum flyable path was identified in Sonmez et al. 98 using GA with the traveling salesman approach. The UAV path planning is performed with a GA. A GA is also used in autonomous UAVs in Pehlivanoglu and Pehlivanoglu. 99 UAVs will take time to reach a particular location from the event-triggered location. The GA achieves a significant reduction in time by optimizing the trajectory and path. In Zhou et al., 100 the target search time is reduced with a GA combined with the divide-and-conquer path optimization algorithm. It is noted that energy efficiency is not studied in the above works.
PSO
PSO searches over a large space of solutions. It is an example of swarm intelligence–based algorithm. Initially, PSO is not able to compute the best solution at the first iteration itself. So, it starts with a group of particle swarms (group of random solutions) and tries to update the best solution. The solution obtained at each iteration is considered as local best solution. These local best solutions are saved. From the local best solution set, the best one is then considered as the global best solution. PSO does not require the optimization problem to be differentiable. PSO tries to find an optimal solution by iteratively checking the solutions and improving it. Each particle’s movement is influenced by its local best-known position, but is also guided toward the best-known positions in the search-space, which are updated as better positions are found by other particles. This is expected to move the swarm toward the best solutions. 101 UAV deployment strategies with least number of AirBS are possible with the PSO technique. PSO is inspired from the food searching concept of a flock of birds. Plachy et al. 102 studied PSO in joint positioning of AirBS with user association. User satisfaction was maximized with increased data rates. PSO is slight less complex than GA, while GA performs well within the same scenario of a smaller number of AirBS. The study did not reflect how the performance of the system would be affected by varying altitudes of AirBS.
ACO
ACO is a metaheuristic swarm intelligence–based optimization algorithm. While the PSO algorithm was inspired by food searching by a flock of birds, ACO was inspired by the natural food searching phenomenon followed by the ants. Ants secrete a hormone called pheromone at the location where they discover food. Other ants in the ant colony will follow the hormone and find the food with shortest distance. As more ants reach the food location, the hormone strength increases and represents a higher probability of preference for that particular path. 131 ACO makes use of probabilistic models and uses that information in finding the optimal path. The best path is found with the help of graphs. The work of Konatowski and Pawłowski 103 discusses the use of ACO in path planning for UAVs. Yue and Chen 104 utilized ACO in UAV path planning where the analysis was performed by first analyzing the path construction and second by analyzing the pheromone update. Ant colony is placed in a discrete space and has no association with time. The selection strategy decides the value in the next update. The best path is computed based on the pheromone update. 104
Stochastic optimization
Stochastic optimization is based on stochastic approximation. This method is applicable for problems with randomness. Stochastic optimizations focus on minimizing or maximizing the optimization problem. Whether to minimize or maximize, that depends on the type of the considered parameter. Detailed theoretical analysis on stochastic optimization 132 was performed by the authors in Spall. 105 Stochastic optimization combined with machine learning for the deployment of AirBSs was proposed in Qin et al. 64 While ABC, PSO, and K-means clustering methods have been used for cooperative deployment of UAV BSs, non-cooperative placement of AirBS was examined in Qin et al. 64 It reduces the need for a reliable link between the AirBS and the central controller. The work was successful in finding a reasonable local optimum value rather than the global optimum. Further research is needed to expand this method to reach a global optimum in a non-cooperative approach.
Greedy algorithm
Greedy algorithm is a method that generates a local optimum at each step. By extrapolating the local optimum, a global value can be generated. One limitation of the greedy algorithm is that the resultant solution may not be the best solution. It has five components, namely, the candidate set, the selection function, the feasibility function, the objective function, and the solution function. The solution is extracted from the candidate set. The best candidate is added to the solution with the help of the selection function. The feasibility function determines whether a candidate can contribute to the solution. A value to the solution is assigned by the objective function. Once a complete solution is discovered, it is indicated by the solution function. 106 Channel modeling, path planning, network planning, and user association analysis can be well optimized with this method. The greedy approach is utilized in Sharafeddine and Islambouli 59 for user association, traffic off-loading, and network recovery. The paper discussed the off-loading of traffic data, and the results show that the algorithm is efficient in the off-loading process; however, the study lacks the analysis of the extra power consumption that will arise. Optimization theory, transport theory, stochastic geometry, machine learning, facility location theory, and game theory are some of the key mathematical tools to be utilized for research related to UAV communications.
Machine learning–based optimization algorithms
Machine learning (ML) is a sub-field of AI that allows machines to access data and learn from the data themselves. Machine learning techniques can be used for optimization. Supervised learning, unsupervised learning, reinforcement learning, semi-supervised learning, and federated learning are the different ML optimization techniques. Deep learning algorithms are also considered as a part of ML algorithms. Supervised learning is sub-classified as classification and regression, whereas clustering, association rules, and dimensionality reduction come as the classifications of unsupervised ML. Classification deals with the identification of hidden patterns in the data. Regression can be linear regression, polynomial, ridge, step wise, lasso, and logistic regression. 131 Linear regression gives a continuous output value to the dependent variable. Regression techniques relate the independent variables and the dependent variable. Logistic regression results in categorical output. As a result, logistic regression is sometimes considered as a classification technique as well as a regression technique. K-means clustering, K-median clustering, and hierarchical clustering are examples of clustering techniques. Classification can be implemented with naive Bayes, K-nearest neighbor (KNN) algorithm, support vector machine (SVM), and so on. In wireless communication, deep learning implemented Q-network (Deep Q-network) is used for detection of signal in multi-input multi-output (MIMO) network.
The application use cases of UAVs are quite high. Some of the latest works are mentioned below. UAVs can be incorporated along with 5G technology. 107 Combining the concepts of video synthetic aperture radar with UAVs can be useful for radar communication. 111 Forsman and Westergren 112 proposed a method to improve power system transient performance with the incorporation of UAVs and static volt–ampere–reactive (VAR) compensator (SVC) 133 . Minimization of mean squared error (MSE) in a scenario where the UAVs are flying and collecting data from sensors is presented in Khosravi and Samadi. 134 Automated inspection of railway systems with UAV aerial images along with fully decoupled convolution filters is proposed in Tong et al. 135 Secure UAV communication with trajectory control is modeled in Tang et al. 113 and Han et al. 114 To identify the UAVs, an e-Sim-based authentication protocol is presented in Shoufan et al. 136 The characteristics of Google’s Loon project is further studied in Serrano et al. 137 3D localization, interference management, channel modeling, and handover management are the challenging research areas to consider for applications with UAV as UE, whereas for BS, applications face challenges in optimal 3D deployment, resource allocation, network planning, and trajectory optimization. 138
Conclusion
In this article, we provided a survey on the applications of UAVs as BSs and relay nodes, for the next generation emerging technologies. A concise introduction into the research problems in each area is discussed. For those who are new into the field of UAVs, this work will help in getting a clear understanding of the applications supported by UAVs. Usability of UAVs is widespread, ranging from maritime sector to AI. Mathematical optimization techniques required for solving research problems associated with parameter optimization. For improving efficiency, resource management, and coverage, joint optimization methods are preferred. Joint optimization of multiple system parameters is yet to be studied by the researchers. An adaptive algorithm that will deploy and maintain the UAVs for different geographical terrains, irrespective of the channel conditions, is a topic for researchers. Development of graphical user interface (GUI) simulator models to which the optimized algorithms of deployment, path planning, or resource management can be embedded and giving a real-life experience of UAV performance is an area that needs attention.
Footnotes
Handling Editor: Lyudmila Mihaylova
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.