
Abstract
Using unmanned aerial vehicle as movable base stations is a promising approach to enhance network coverage. Moreover, movable unmanned aerial vehicle–base stations can dynamically move to the target devices to expand the communication range as relays in the scenario of the Internet of things. In this article, we consider a communication system with movable unmanned aerial vehicle–base stations in millimeter-Wave. The movable unmanned aerial vehicle–base stations are equipped with antennas and multiple sensors for channel tracking. The cylindrical array antenna is mounted on the movable unmanned aerial vehicle–movable base stations, making the beam omnidirectional. Furthermore, the attitude estimation method using the deep neural network can replace the traditional attitude estimation method. The estimated unmanned aerial vehicle attitude information is combined with beamforming technology to realize a reliable communication link. Simulation experiments have been performed, and the results have verified the effectiveness of the proposed method.
Keywords
Introduction
With rapid increase in the use of smart phones and extensively exchanging information within Internet of things (IoT), the traffic has increased significantly in the mobile wireless network. Many methods have been proposed to improve the data access and transmission capabilities. For example, Rong et al.1,2 propose that WiMAX can successfully solve broadband wireless access and reach high spectrum-utility efficiency. Wu et al. 3 and Han et al. 4 attempt to use big data and cloud transmission generated by wireless networks to enhance user cooperation level with efficient and secure transmission. Han et al.5,6 increase the terminal access rate by improving the coding method in the case of limiting the number of antennas. However, Long Term Evolution (LTE) and LTE-Advanced methods will be unable to adapt to this trend in the near future, so it is expected by 2020, the fifth-generation (5G) mobile communication system will be realized. The following new features are achieved and presented in Bao et al. 7 and Gupta and Kumar: 8 massive MIMO (Multiple Input Multiple Output), beamforming, small dense networks, millimeter-wave frequency bands and movable base stations (BS).
To achieve flexibility and wide coverage in the 5G mobile networks, movable BS is a promising approach. The mobility of unmanned aerial vehicles (UAVs) is the best choice for movable BS and has been widely used. 9 Movable unmanned aerial vehicle–base stations (UAV-BSs) are easier to construct line-of-sight (LoS) communication links to provide services for users than ground BSs. 10 Moreover, the cooperative operation of UAVs can effectively increase the coverage and relay distance. 11 It can also provide high-speed, high-capacity communication capabilities for the communication systems, especially when unforeseen events occur or conventional methods cannot provide solution. 12 In addition, UAVs can play an important role in the IoT. The IoT is mainly composed of a variety of small devices. These devices are usually only used to transmit at close range because of insufficient energy.13,14 In the IoT environment, UAVs can be used as relay stations to expand the communication range of the IoT devices. UAVs move dynamically to the device, and the device data are collected and transmitted. 15
Although UAV IoT communication network has many advantages, it still requires to study some problems, such as the coverage of UAV communication and the setting of the flight altitude, mutual interference, and so on. The UAV communication channel is the air-to-ground propagation channel. Khawaja et al. 16 indicate that most of the energy of the UAV communication will arrive at the user from the LoS path. In Al-Hourani et al., 17 the LoS propagation probability of the UAV communication system is modeled, and the optimal height of the UAV-BS placement is evaluated. Bor-Yaliniz et al. 18 and Mozaffari et al. 19 optimize the maximum placement height of the UAV-BS in order to reach the maximum coverage area.
However, compared with the research on the coverage area and optimal height of the UAV-BS, few papers investigate the impact of UAV-BS attitude or fly state on the communication channel. Because the UAV is always in the process of movement, it requires continuous navigation where UAV communication channel would change with obvious time-varying characteristics. Further, the communication link performance will be affected because the UAV-BS will rotate during the operation. The rotation of the UAV-BS can cause the antenna pointing to variation, resulting in a mismatch at the receiver.20,21 A realistic geometric mode of UAV rotation and antenna polarization is proposed in Chandhar et al., 22 which can achieve the effect of reliable communication link. The use of the circular antenna can maintain a good communication link at the BS, whether in Ground Station (GS) or UAV. But the effect of UAV attitude variation has not been further explored in this article. Zhao et al. 23 propose a communication channel estimation method based on UAV attitude information fusion. The traditional Kalman filter is employed for attitude calculation of the UAV. However, the traditional Kalman filter attitude calculation methods have limitations, such as heavy calculation load and poor environmental adaptability. The environmental noise and measurement noise in the system cannot satisfy the ideal Gaussian distribution due to insufficient prior knowledge of the environment.
Herein, we propose to apply the currently popular deep learning in the field of UAV IoT in an attempt to solve the problem of the traditional UAV attitude settlement method. The deep learning can be well applied to the attitude calculation because the deep neural networks can learn the nonlinear characteristics of the system. Wang et al. 24 presented a correlation which is difficult to model, as the error of the inertial navigation and the carrier operation. However, the neural network as a black box can effectively fit this correlation. 25 With the efforts of researchers, a variety of deep neural networks have been developed to replace simple neural networks and widely used in various fields. In data fusion, deep neural network has also achieved promising results. 26 Deep learning is different from the traditional algorithm in that it can have faster-computing speed and can better predict the attitude of the UAV with parameter adjustment of the deep network.
Therefore, a method of UAV attitude prediction based on deep neural network is proposed, for the UAV attitude estimation and MIMO techniques. The real-time motion state of the UAV is combined with the beamforming technology in the MIMO system to optimize the communication link. Specifically, BS with a number of antennas can communicate with multiple single-antenna terminals simultaneously in a large-scale MIMO cellular system. By coherent closed-loop beamforming, the energy is constrained within a narrow beam. This method can reduce the interference and the antenna system can achieve high efficiency and low latency. 27 However, the attitude and beam direction will change when the UAV dynamically navigates, leading to the mismatch of the receiver. The problem will affect the quality of the communication link. Thus, we use deep autoencoder (DAE) combined with feedback neural network to estimate UAV attitude instead of traditional methods. The estimated UAV attitude information is integrated with beamforming technology. Finally, the antenna system can modify the beam angle in advance so that the beam can always point to the receiver for achieving reliable communication link. The experiment results show that the deep learning can obtain effective results. Based on the infinite potential of deep learning, deep learning network can be trained for wider applications, which would promote future research in the field of UAV IoT.
The remainder of the article is organized as follows: “UAV attitude estimation” section presents the principle of the traditional UAV attitude calculation and the improved method based on deep neural network. “Beamforming” section introduces the mmWave MIMO system as well as its implementation in 5G UAV-BS. In “Simulation experiments” section, the simulation results identify the effectiveness of the proposed method, followed by “Conclusion” section to conclude the article.
UAV attitude estimation
The inertial measurement unit (IMU) inertial sensors are widely applied on UAVs for inertial navigation. The IMU consists of three MEMS (micro electromechanical systems) accelerometers, three gyroscopes, and computing circuits. Triaxial gyroscopes are also mounted to assist the positioning system. Because of the characteristics of acceleration, gyroscope, and electric compass/magnetometer, there are some unavoidable defects in these inertial measurement devices. Among them, the accelerometer and electronic compass have poor dynamic response characteristics. The gyroscope has satisfactory dynamic response and high angular velocity instantaneous accuracy. However, due to the drift and integration process, the calculated attitude angle will produce the cumulative error in the measurement process. It is necessary to eliminate errors in the process of multi-sensor data fusion. Complementary filter (CF) can effectively resolve noise in the frequency domain. Therefore, using complementary filtering algorithm to fuse the data of these three sensors is a promising method. In this way, they can complement each other in the frequency domain. The measurement accuracy of the UAV attitude angle can be significantly improved during the dynamic operation.
The methods generally used for calculating attitude include Euler angle method, direction cosine method, and quaternion method. Euler angle method exists singularity problem (gimbal deadlock) in the calculation of the attitude, so it could not be used for calculating the full attitude. The direction cosine can be utilized for all attitude calculation but calculation load is heavy, and it cannot meet the requirement of real time. The method of Quaternion has the characteristics of less calculation, non-singularity, and can satisfy the real-time calculation of the UAV attitude. In the attitude estimation of IMU,

where


Therefore, through the filtering process of the CF, the high-frequency noise of the acceleration and the magnetometer, and the low-frequency noise of the gyroscope are removed. Then, the correction errors in three directions are obtained. Finally, the cumulative error is calculated by combining the
Here,
In this article, we choose the method of deep neural network for the attitude estimation. The chosen DAE is an unsupervised neural network, which is widely used in clustering and data fusion. The DAE performs data fusion through the process of encoding and decoding. The process of encoding the input values is called data fusion. The optimization goal is to make the decoded output value equal to the input, that is,

Deep autoencoder network structure.
Because of the small number of single-layer autoencoder and the weak feature extraction, the autoencoder network is extended by deepening the depth of the coding layer. By introducing the deep network, we can calculate more complex input characteristics. Because each hidden layer can transform the output of the previous layer, the deep neural network has better expression ability. In order to avoid the problems of local extremum and gradient discretization, the DAE networks adopt the layer-by-layer greedy training method. The main process of layer-by-layer greedy algorithm is to train only one layer of the network at a time, that is, we first train a network with only one hidden layer. After this training, we will use the results as input for the next hidden layer. 29 Similarly, only after the training of the previous layer is completed, the training of the current layer can be started, as shown in Figure 2.

Greedy training layer by layer.
The DAE network is used to predict the UAV attitude. The input layer data of the DAE network are measured by the UAV sensor, including triaxial accelerometer, triaxial gyroscope, and triaxial magnetometer. The data are input into the network with the coding layer and decoding layer training. After the greedy training method of layer by layer, the output layer is obtained. A feedback neural network to the coding layer is developed for supervised fine-tuning. Finally, we can get three attitude estimation angles (pitch, yaw, and roll) after data fusion. By using the time correlation of the attitude sequence, the beam angle is updated by predicting the next moment of the UAV attitude. The attitude prediction based on DAE-Back Propagation (DAE-BP) is presented, shown in Figure 3. There are a variety of sensors on the UAV to assist the navigation system and the sensor measurement is taken as the input. High-precision attitude estimation is obtained with deep neural networks.
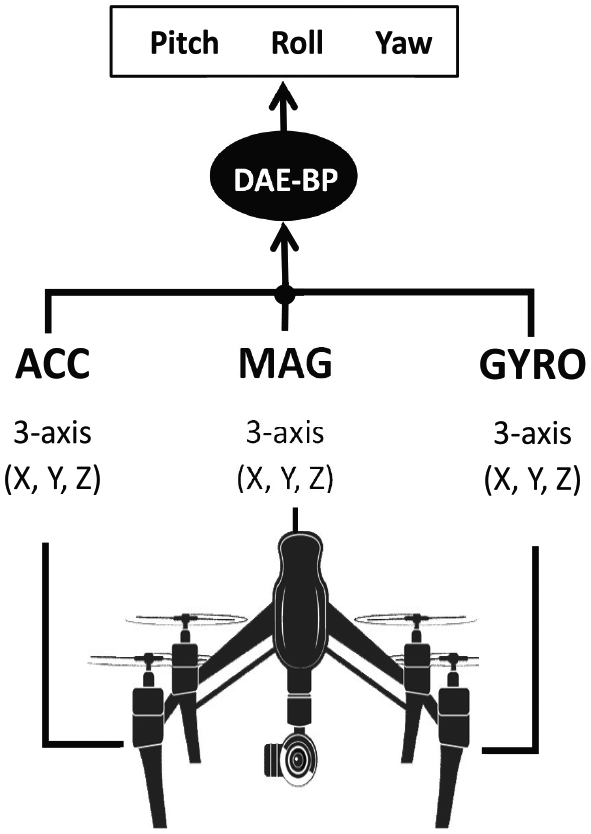
DAE-BP attitude estimation block diagram.
Beamforming
UAVs are widely applied in military, civil, and other fields. The requirements for the communication of UAVs have gradually developed from ensuring the unobstructed communication link to large data volume communication. Increasing channel capacity becomes an urgent problem to be solved. MIMO uses multiple antennas in the transmitters and receivers to obtain spatial diversity gain without increasing system bandwidth and total transmitting power, thus improving the spectrum utilization and channel capacity. Therefore, in order to increase the communication capacity in the UAVs communication, multiple antennas are often configured at the receiving and sending ends to obtain higher gain. The combination of multi-antenna technology and UAV communication can not only overcome the problem of low communication capacity of UAV, but also improve the reliability of communication system. At present, the antenna system of 4G (fourth-generation) and 5G is a massive MIMO system. The beamforming technology in massive MIMO is a key part of 5G mmWave applications, which is developed from a single-antenna system, described in Figure 4.

The planar array antenna.
The planar array antenna is a rectangle shape of the BS. dy is the interval between two antennas; dz is the interval between the upper and lower antennas layer;
Unlike planar antenna arrays, cylindrical antenna arrays have special symmetrical geometry structure, which can reduce the computational burden on the system in calculating the transmitting and receiving power. Then, the cylindrical antenna array is given according to the geometric relationship, which can further increase the number of antennas and maximize the advantages of massive MIMO. The newly designed omnidirectional cylindrical UAV mounting antenna is presented in Figure 5, where the shape of a cylindrical antenna is described by Cartesian coordinates. This new type of the cylindrical antenna can effectively improve the quality and robustness of the communication links. If this antenna systems were mounted on the UAVs, none of the signals would be ignored. It will improve BS coverage and reception power.
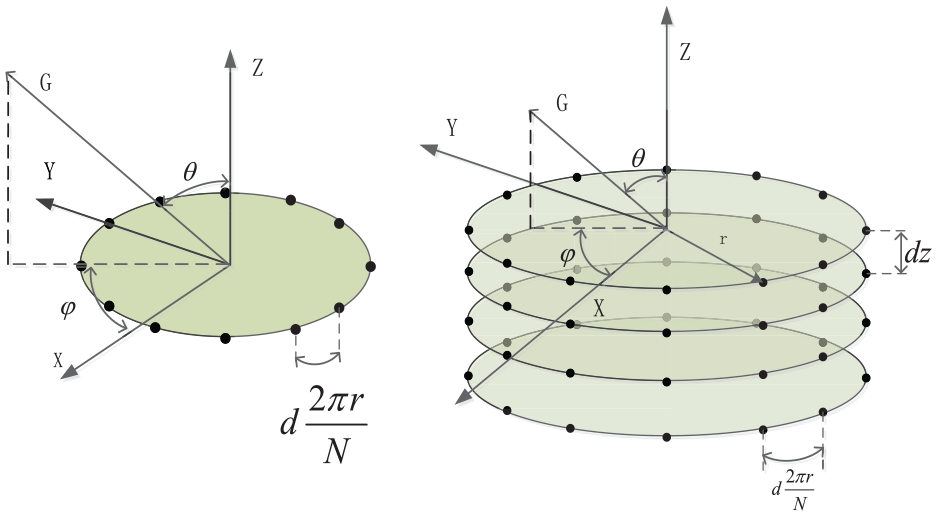
The cylindrical array antenna.
In Figure 5,

where r is the radius of the cylindrical antenna, and N is the number of antennas on a single ring. The guidance matrix of the cylindrical antenna array can be described as

The cylindrical antenna system is mounted on the UAV-BS. We can get the vertical and horizontal angles of the target equipment relative to the antenna array through the guidance matrix. When the attitude of UAV varies, the vertical and horizontal angles of the antenna array on board will also change with respect to the target equipment. We expect that the antenna array will always point to the target device. Therefore, when the attitude of UAV changes, the vertical and horizontal angles relative to the target equipment will be deduced by Euler angle, and the beam will be pointed to the target equipment by the guidance matrix. According to the definition in International Telecommunications Union Radio, 31 the vertical and horizontal angles of the cylindrical antenna array can be obtained by the rotating angles
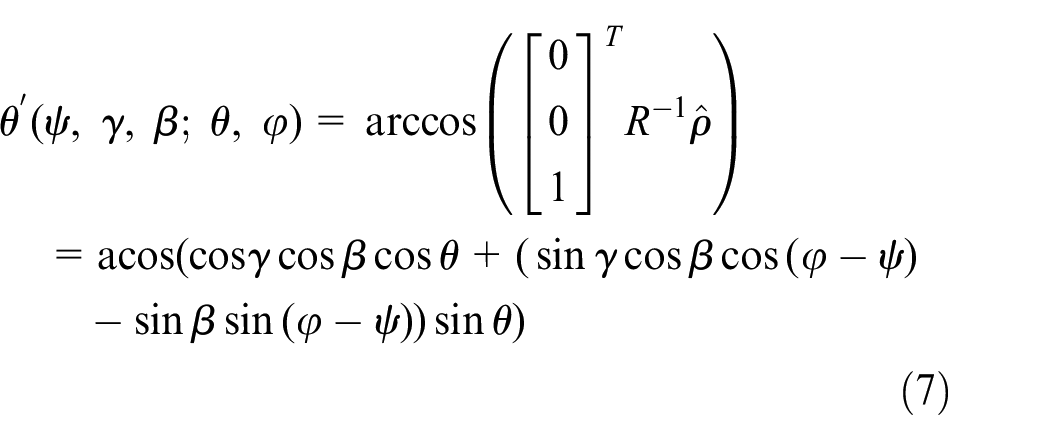

where,
Simulation experiments
Assuming that the experimental environment is an urban area, UAVs operate in urban areas and communicate with the BS in 5G through the MIMO antenna system, seen in Figure 6. The UAV-BS will perform the functions of the floating BS to provide signals to remote areas and transmit them to the ground BS. We set the UAV-BS to fly around the ground BS. During the movement, the UAV attitude will continue to change with random disturbances. The experiments are divided into two parts. The first part carries out the UAV attitude estimation, using the deep neural network DAE-BP for attitude estimation, and the experimental results are compared with the attitude calculation using CFs. In the second part, the real-time attitude angle is obtained, and the angle at which the beam should be pointed is derived to achieve the beam pointing control. The antenna array beam will always point to the ground BS. The UAV-BS establishes a conventional communication link with the ground BS via two attitude estimation methods. Finally, the method is evaluated by calculating the gains of experiments performed using two different methods.

UAV-BS communicates with ground BS.
In this article, by taking advantages of the characteristics of the UAV attitude time sequence, we establish a model based on DAE-BP networks. First, the attitude angle of the UAV needs to be estimated. The input data come from the UAV sensors and, simultaneously, input CF and deep neural network DAE-BP. The target output is the UAV attitude angle. As the input data, the sensor data are collected from the triaxial gyroscope, triaxial accelerometer, and triaxial magnetometer, totally nine inputs. The three outputs (roll, pitch, yaw) are Euler angles calculated from the deep neural networks. In order to avoid the occurrence of gradient disappearance of the neural network, due to the saturation of the activation function, it is necessary to reduce the influence of the data with large order of the magnitude of data fusion. All of the data are normalized in the range [0, 1] before processing, calculated as

The neural network model should be determined with appropriate parameters in order to achieve high accuracy, including the number of iteration, layers, and neurons.
The PIXHAWK aircraft is chosen as the experimental equipment equipped with gyroscope, accelerometer, and magnetometer. Data collected by the sensor are sampled at a frequency of 100 Hz. A total of 8000 sets of sensor data are obtained. In this set of data, we use the first 80% of data as the training set and the remaining 20% as the test set. The data collected by each sensor is three-dimensional data, and the sequence diagram is shown in Figure 7.
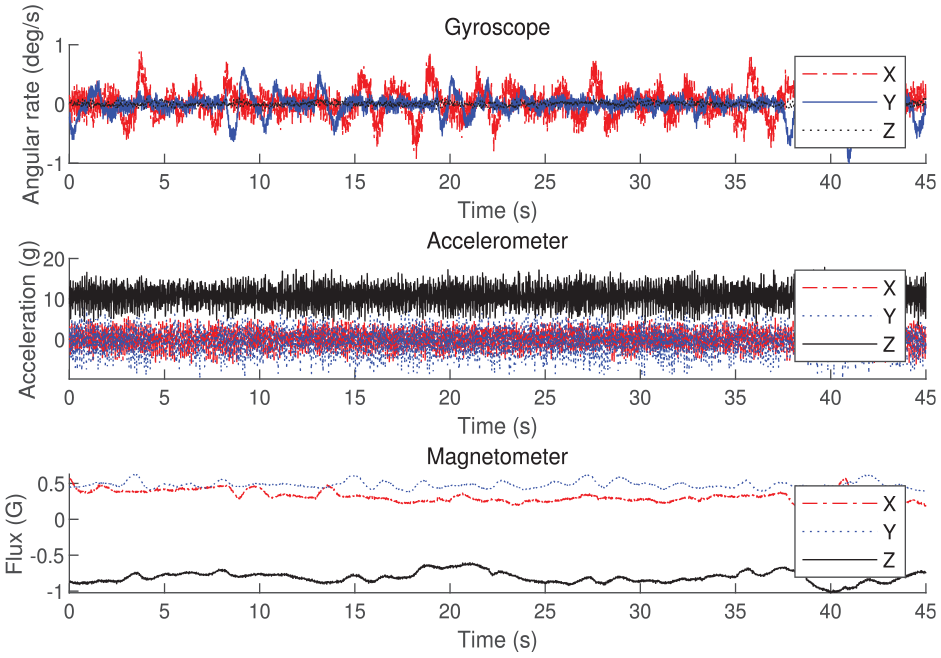
The sensor data from IMU.
The results of the attitude calculation by CF and attitude estimation by DAE-BP deep neural network are shown in Figure 8. It can be found that the attitude estimation results of DAE-BP deep neural network have the same trend as the traditional attitude algorithm. Moreover, after the supervised fine-tuning, the results are smoother through BP neural network.

The estimated attitude by using DAE-BP and CF.
It is assumed that a UAV-BS operates in the area covered 600 × 600 m2, which includes 100 user equipment in the special cell randomly. After the UAV-BS runs for a period of time, the collected data are analyzed. Situation A is the UAV-BS configured with attitude estimation method by DAE-BP. Situation B is the case where the CF attitude estimation method is used. The gain curve in two situations is illustrated in Figure 9. The gain curve of situation A using the DAE-BP network method is higher than that of situation B through the experimental result diagram, because DAE-BP method is smoother and faster. Therefore, it proves that the UAV-BS using the attitude estimation method has a better quality communication link during flight.
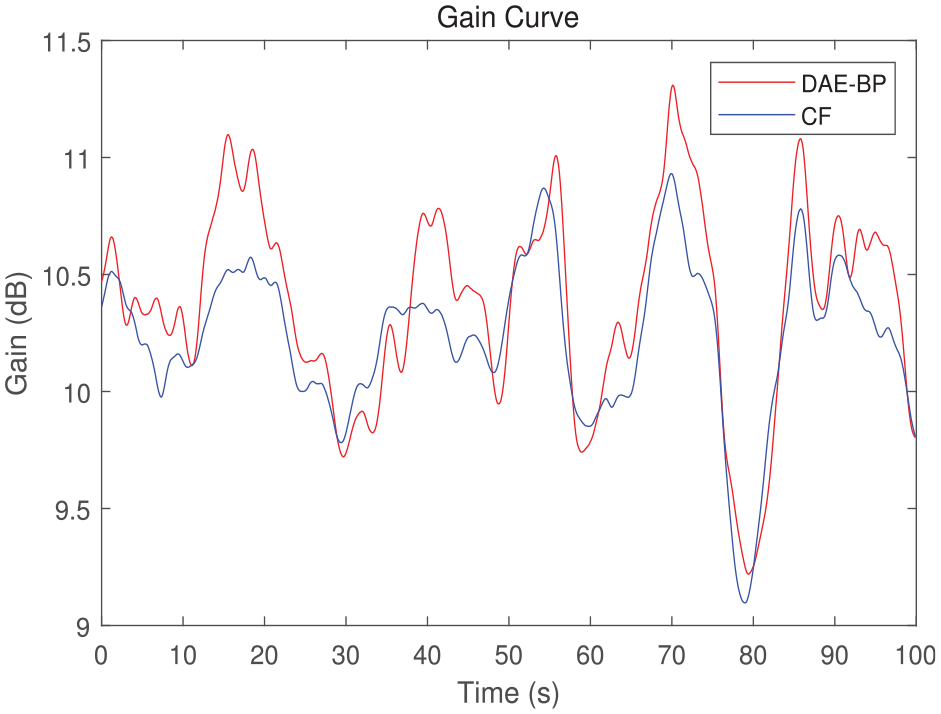
Gain curve comparison between method with DAE-BP and method with CF.
Conclusion
In this article, a UAV communication channel tracking system based on UAV-BS attitude estimation is developed. The deep neural network is used for attitude estimation, and the attitude angle can be used to calculate the angle at which the current beam requires to be located. This method can solve the problem of receiver mismatch caused by UAV dynamic navigation. By predicting the UAV attitude angle, the appropriate horizontal and vertical angles of the transmitted beam can specifically set. In summary, this system combining the UAV attitude and beamforming technology is used to optimize the communication quality of UAV IoT. Experiments have been performed to verify the feasibility. The developed system can perform the UAV attitude estimation and channel tracking to realize the stable communication link quality. The deep learning can replace the traditional UAV attitude algorithm to carry out experiments. Further research will consider using long short-term memory (LSTM) deep neural network for attitude estimation. UAV communication channels have various forms, so more complex scenarios will be further studied.
Footnotes
Handling Editor: Michel Kadoch
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported under the Chinese National Natural Science Foundation with Ref. U1713209 and Science and Technology Planning Project of Guangdong Province with Ref. 2017B010117009 and Shenzhen Basic Research Program with Ref. JCYJ20160510154736343 and JCYJ2017 0818153635759.