
Abstract
Rodent tests of function have advanced our understanding of movement, largely through the human training and testing and manual assessment. Tools such as reaching and grasping of a food pellet have been widely adopted because they are effective and simple to use. However, these tools are time-consuming, subjective, and often qualitative. Automation of training, testing, and assessment has the potential to increase efficiency while ensuring tasks are objective and quantitative. We detail new methods for automating rodent forelimb tests, including the use of pellet dispensers, sensors, computer vision, and home cage systems. We argue that limitations in existing forelimb tasks are driving the innovations in automated systems. We further argue that automated tasks partially address these limitations, and we outline necessary precautions and remaining challenges when adopting these types of tasks. Finally, we suggest attributes of future automated rodent assessment tools that can enable widespread adoption and help us better understand forelimb function in health and disease.
Keywords
Introduction
Model organisms are meant to reduce complexity and allow testing of mechanisms. However, for nervous system control of arm and hand movements, testing in rodents poses several challenges. First, much time is spent trying to get rodents to understand what is expected of them, rather than building skill (motor learning), per se. Shaping behavior varies by the skill of the experimenter and how natural the behavior is for the animal. In addition, rodents are able to perform tasks using a wide repertoire of movements in health and compensatory strategies after injury or disease.1,2 This makes discrimination of how a task is performed and the level of task performance difficult. Finally, one of the most accurate methods of tracking hand movements in people is through marker-based motion tracking.3,4 However, using similar technology in rodents is very challenging given the small size of rodents (particularly the paw) and the difficulty of attaching markers on their paws without being gnawed.
Current assays of rodent forelimb movements meet several of these challenges, but they have important limitations. Because most tasks are performed and scored by human experimenters, they are labor intensive, and the evaluation of kinematics can be subjective and largely qualitative.5,6 We argue that these limitations are the biggest motivation for inventing automated devices.7-11 By automation, we mean that human tasks are done by a machine or computer, including training or analysis of forelimb movements. 7
In this Point of View article, we weigh the use of automated forelimb tasks against traditional manual tasks. We first describe the different types of manual tasks that are currently in use, followed by discussion of available automated tasks. We detail the challenges of adopting automated systems as well as ways to mitigate these challenges. We conclude by describing some attributes for design of future automated tasks and the validation studies that might lead to their wide scale adoption.
Manual Tasks
We define manual tasks as those that require human experimenters for testing and analysis. This method involves directly observing or video recording rodents reaching, walking, or manipulating. Examples of manual tasks that rely on human experimenters are shown in Figure 1.12,13 Much of our current understanding about motor skills comes from studies using these tasks.5,14-19 Examples include the single pellet reaching task (SPRT); Irvine, Beatties, and Bresnahan (IBB) task 20 ; Montoya staircase test; vermicelli manipulation task 13 ; and the pasta matrix reaching task. 21 Among these tasks, the SPRT is both common and representative of reaching, a key forelimb task, so we will use this task to illustrate many of our points.
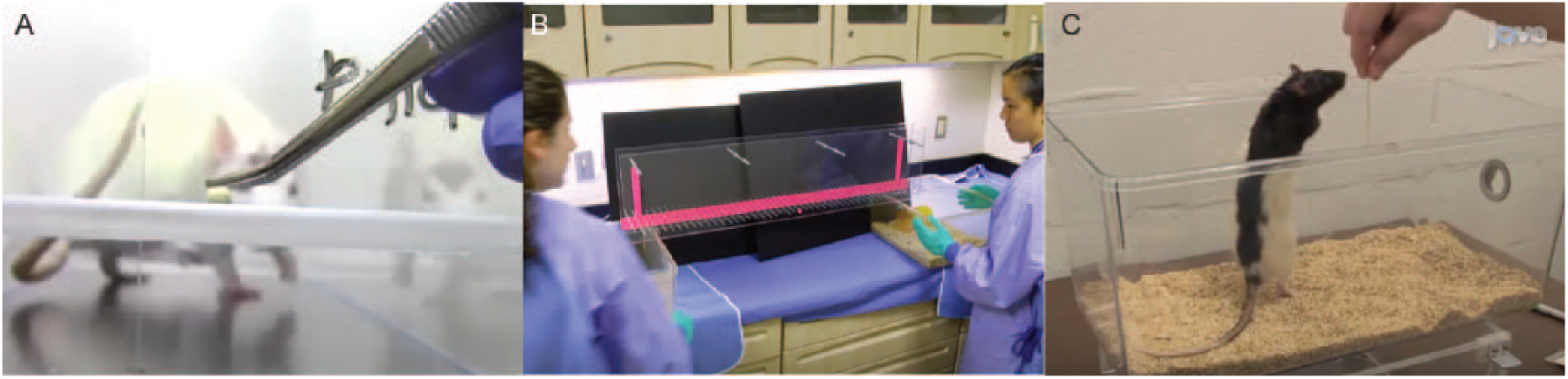
Manual rodent tasks: A. An experimenter baits the single pellet reaching task. B. Two experimenters run the horizontal ladder task. C. The vermicelli handling task requires an experimenter to actively bait and video record the behavior. Figures 1B and 1C are courtesy of JoVE.
We have chosen to specifically focus on SPRT because of 3 specific advantages it has over other available tasks. First, despite its labor-intensive nature, many scientists prefer this task over others because it is highly sensitive to chronic neuronal injuries. Second, it also provides success rate outcomes along with kinematics of movements. Finally, this task tests a forelimb movement that is homologous to human movement. 22 There are other tasks that are widely used by many laboratories such as the Montoya staircase, but it is beyond the scope of this article to compare automated tasks with all these available tasks. To facilitate the discussion on distinctions between manual and automated tasks, we have summarized the advantages and disadvantages of both the automated tasks and manual tasks in Table 1.
Comparison of Automated and Manual Forelimb Tasks. a
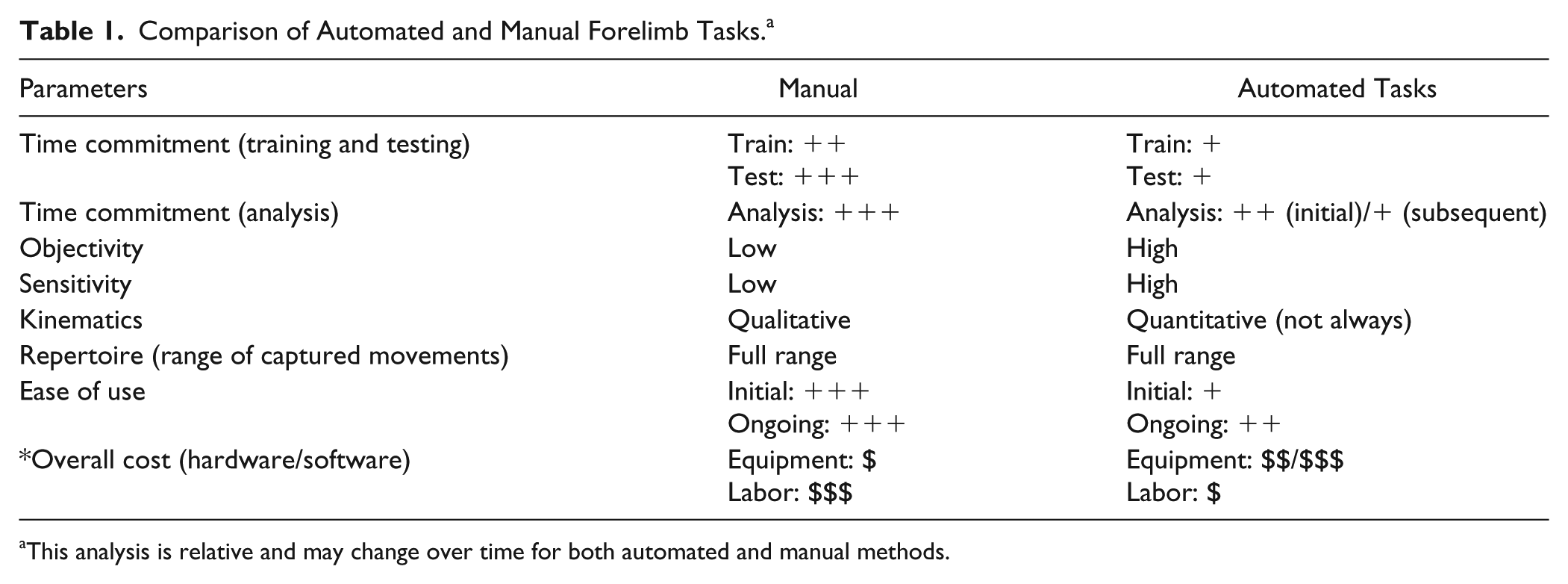
This analysis is relative and may change over time for both automated and manual methods.
Advantages of Manual Tasks
There are a number of reasons why manual tasks are still very popular today. Many researchers prefer these methods because they have a track record of efficacy and an extensive publication history, which allows comparison against previous studies. Also, these tasks are intuitive for both the rodents performing the task and the human experimenter. In addition, they have low start-up costs, are simple to implement, and do not take up much space. For example, in our experience, new SPRT costs only around US$700 for the clear plastic materials and the video camera, and this can be set up on any lab bench.
The ability to combine multiple manual tasks into one study is another major advantage of using these tasks. Combining several tasks provides performance evaluation over a larger repertoire of movements and ability levels. For example, whereas the SPRT or Montoya staircase evaluates reaching and grasping skill, the cylinder test measures paw movement during rearing and preference between the paws. Manual tests such as the cylinder test and vermicelli handling task that measure paw preference can evaluate differences between paws that are often missed in single forelimb assessments.
Disadvantages of Manual Tasks
The main disadvantages of manual tasks are the following: (1) they are labor intensive to conduct and analyze; (2) the analysis is subjective; and (3) often, the outcomes are qualitative. The large amount of time needed to train, test, and analyze the data from these tasks means that it takes significant resources. One study estimated that it can take up to 47 hours of training time and 141 hours of testing to collect and score data from a longitudinal experiment with 10 rats. 6
Kinematic performance measures produced by manual scoring are often qualitative. For example, scoring of kinematics of the SPRT usually involves assigning values to different aspects of movement based on a categorical scale such as normal, abnormal, or absent. This type of scoring system cannot track movements with high resolution. Precise limb movements are necessary for rodent models because nervous system injury or manipulation often causes more subtle effects than those observed in humans, who rely more on dexterous movement. It should be noted that success rate is the main outcome measure in this task, which is computed in a quantitative manner.
Another major drawback to manual tasks is that they rely on human observers for kinematic evaluation, which can introduce variability. Errors can arise from multiple users scoring data from the same subject (low interobserver reliability) or from one observer measuring performance of multiple subjects or at multiple time points (intraobserver reliability). For example, the IBB test used to measure fine motor functions of forelimb and digits after cervical spinal cord injury in rodents requires grading forelimb function using a 9-point scale. 20 In one study, the authors identified at least 6 possible ways in which raters can differ in their scores. There was more than a 1-point difference in scoring for novice raters, and expert input on the scoring did not reduce this difference. Such variability lowers the power of studies that use manual assessment methods. However, subjectivity can be mitigated to an extent by adopting good laboratory practices with standardized protocols and properly training staff. Such training lowered the variability of a manual clinical movement test, the Fugl-Meyer, 23 in people with stroke.
Automated Tasks
Innovations in the behavioral neuroscience community have led to the development of many types of automated tasks to test forelimb function. Several factors drive this innovation. Computing power and operator expertise have improved tremendously in recent decades along with a drop in prices of the devices. In addition, sensors, including cameras and microcontrollers (like Arduinos), are also becoming cheaper and easier to use. Finally, innovations in computer vision and machine learning algorithms have enabled the automated detection of movements. In this section, we point out how an automated approach to some currently available manual tests and some newly invented ones may allow more precise measurement of impairments as well as save time and money in the long run.
Advantages of Automated Tasks
All tests of forelimb function require training, testing, and analysis. Automation has attempted to decrease human participation and increase objectivity and quantification of each of these components.
Automated Training
Training animals involves habituating to the environment, teaching the task, baiting with food rewards, and shaping out unwanted movements during execution of the task. To illustrate how automation can help with these complex steps, we will discuss an automated system that was specifically developed for the SPRT. Training in the traditional manual version of the SPRT task involves placing animals in the reaching box and encouraging them to reach and grasp the pellets through an aperture. The most common outcome measure is the percentage of pellets successfully retrieved.
Baiting the animals to reach toward pellets in the SPRT task can be done with an automated dispenser. One research group has developed an Automatic Pellet Presenting (APP) system that places food rewards on the left or right of the aperture to the reaching box. 8 The APP is only initiated when the rodent breaks an infrared beam fixed at the back of the box; this forces the animal to go to the back of the cage after each attempt, thereby allowing a reset between trials. Automating the baiting of the task enables more trials, and this leads to faster acquisition of the task. It typically takes 3 weeks to train animals to proficiency using a traditional training paradigm of 25 trial sessions per day. Using the APP, training only took about 3 days. The rats were trained using up to 250 trials each day, resulting in a rapid attainment of peak performance. The large number of trials is difficult to achieve and maintain using manual methods.
A similar automated reward presentation has also been implemented in a rodent version of the center-out reaching task that is frequently used in human and primate experiments.24,25 However, in the rodent version, water droplets are presented in an automated manner to head-fixed mice. 26 The main advantage of such automatic reward presentation is that animals spontaneously learned to reach and grasp within 3 to 5 sessions, each lasting around 30 minutes. In addition, the reward position can also be automated to 3 separate locations—right, center, or left—which provides a method to study the effect of target change.
Another benefit of automated training is that it allows standardized training protocols. It is difficult for human users to treat every animal the same when training animals with traditional methods. Differences in training between trainers or between animals can produce variability in task acquisition and performance. Even with standard protocols and experimenter training, the skill and even the sex of the human experimenter can affect the animals. 27 Training animals with automated equipment and computer protocols is likely to reduce this variability.
One more key feature of automated training is that it can be adapted to performance in real time. Adaptive training protocols can be designed to vary difficulty of the task automatically based on how animals perform. For instance, when training animals on tasks that require them to manipulate a target mounted on a sensor,9,28 a computer algorithm can adjust the criterion for task success based on the animals’ performance. The software computes the success rate of the 10 most recent trials and automatically either increases or decreases the difficulty of the task. Adaptive algorithms can be developed to enable training with a failure rate optimized for learning, decreasing training time. 29 The reward criterion for a task can be adjusted to push animals to their peak performance. From the rehabilitation perspective, varying the difficulty of the task allows optimally challenging subjects to keep them engaged in task for better learning 30 and to better match the complexity with skill level of the performer 31 than if the task difficulty is the same for all subjects.
Automated Testing
Adaptive algorithms can also measure task performance more accurately and faster than tests that apply the same task difficulty for each trial. 32 Although adaptive testing can be done with manual tasks, this procedure can be implemented more easily with automated tasks driven by computer algorithms. In human motor performance, peak performance is usually more informative than performance of a task with a static difficulty. In addition, adaptive testing allows performance measurement across a larger range of abilities.
Automated baiting of the SPRT and measurement of the number of pellets left is used to quantify success rate of reaching and grasping. The APP system described above has also been successfully used for assessment. 8 A pair of infrared LEDs were used in combination with infrared cameras to detect when rats removed a pellet from the tray as well as the location of rats between trials (Figure 2). If the rats failed and the pellet dropped off the trays, a 15° ramp allowed dropped pellets to roll toward a camera, which then detected these trials as misses using image analysis. All the information from different sensors were fed to a computer using custom MATLAB software to compute success rates. Thus, automated methods were used to score the success rate of pellet retrieval, obviating the need for hand scoring. The authors report that they spent more than 50% less time per rat (21 vs 50 min/rat/wk) using the automated setup when compared with manual methods. 8
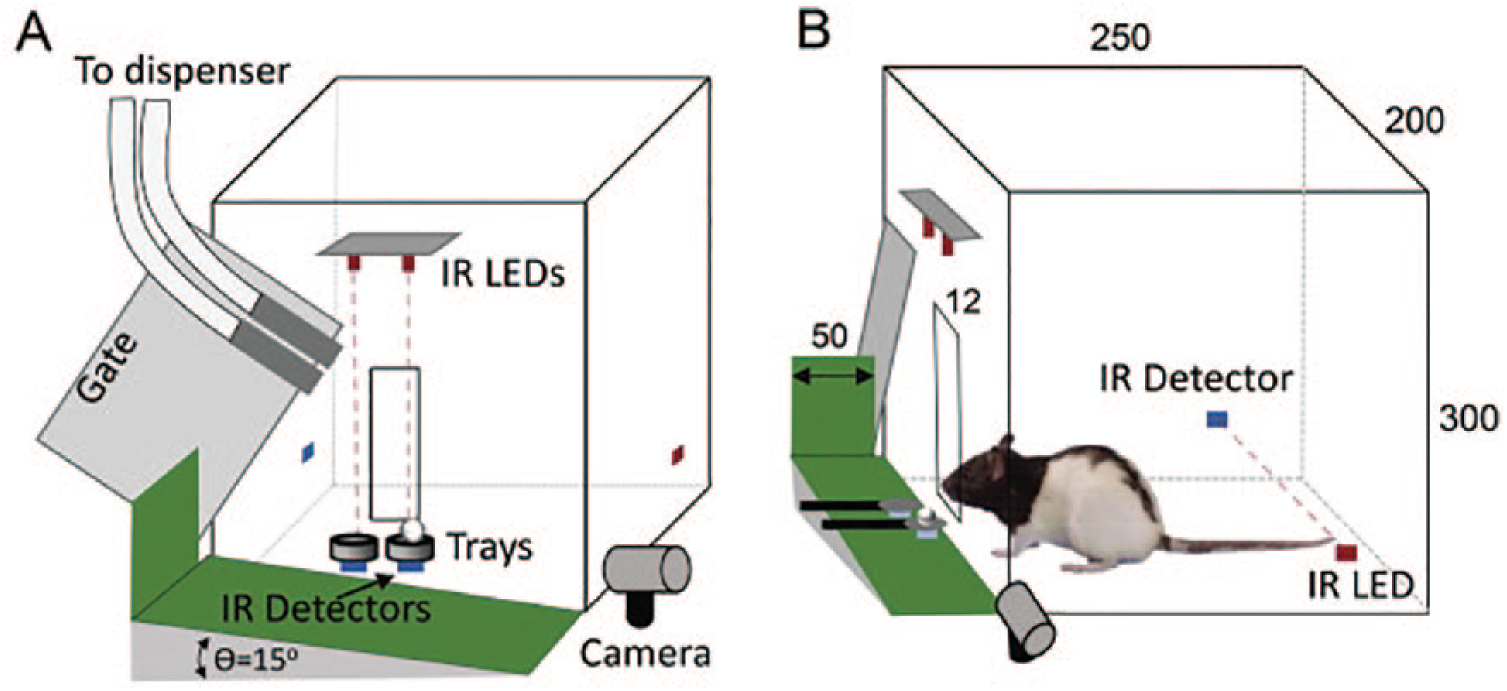
Automated single pellet reaching task: A. Schematic of rat pellet reaching box is shown with infrared (IR) LEDs and detectors along with camera to detect fallen pellets. B. Side view of the same reaching box as in (A) is shown with a rat inside the box interacting with pellets. Also shown is another set of IR LEDs and detectors that help locate animal position inside the box (Courtesy: Elsevier).
There are a few studies that have attempted to automate the testing of kinematic of reaching as well. Most of these studies use computer vision to track the reaching paw.33-35 In one of the studies, the reaching paw of mice was identified by applying green dye to the forepaw and using color contrast analysis to track the reaching movements. 33 These methods were able to extract the tip of the paw, which allowed measurement of reach trajectory, speed, and smoothness. In a demonstration of the utility of this approach, the authors provide evidence that even though mice spontaneously recovered retrieval of pellets (2 weeks after injury), the kinematics of reach showed sustained deficits, even out to 30 days after injury. It should be noted that authors found deficits in mice using the cylinder test and the foot fault test throughout their testing period. In other words, if the authors were to use the more laborious kinematic analyses of the SPRT test, it is possible that they would have arrived at the same conclusions as they did with other manual tasks. However, automated kinematic analysis allows reaching this conclusion quickly and using a single test.
Automated testing has also been implemented in another type of task that requires animals to reach, grasp, and manipulate an instrumented device, known as a manipulandum. Thus far, we have discussed tasks where animals reach and grasp food rewards directly with forepaws. The main advantage of manipulandum tasks is that they can isolate specific aspects of forelimb movement instead of trying to capture an entire reach and grasp sequence. One example of such a task is the knob supination task (Figure 3) that was designed to specifically measure distal forelimb supination in rodents.9,28,36 Supination loss is a relatively specific sign of injury to the descending motor circuits. 37 In addition to being a sensitive sign of motor circuit impairment, supination loss strongly correlates with loss of hand function.38-40 Once animals are trained to supinate, automated testing allows quantifying supination angles without any need for human intervention. Animals are automatically rewarded with food pellets when the knob is turned beyond a user-defined threshold. The angle is used to compute angular velocity and latency to the peak angle among other metrics.
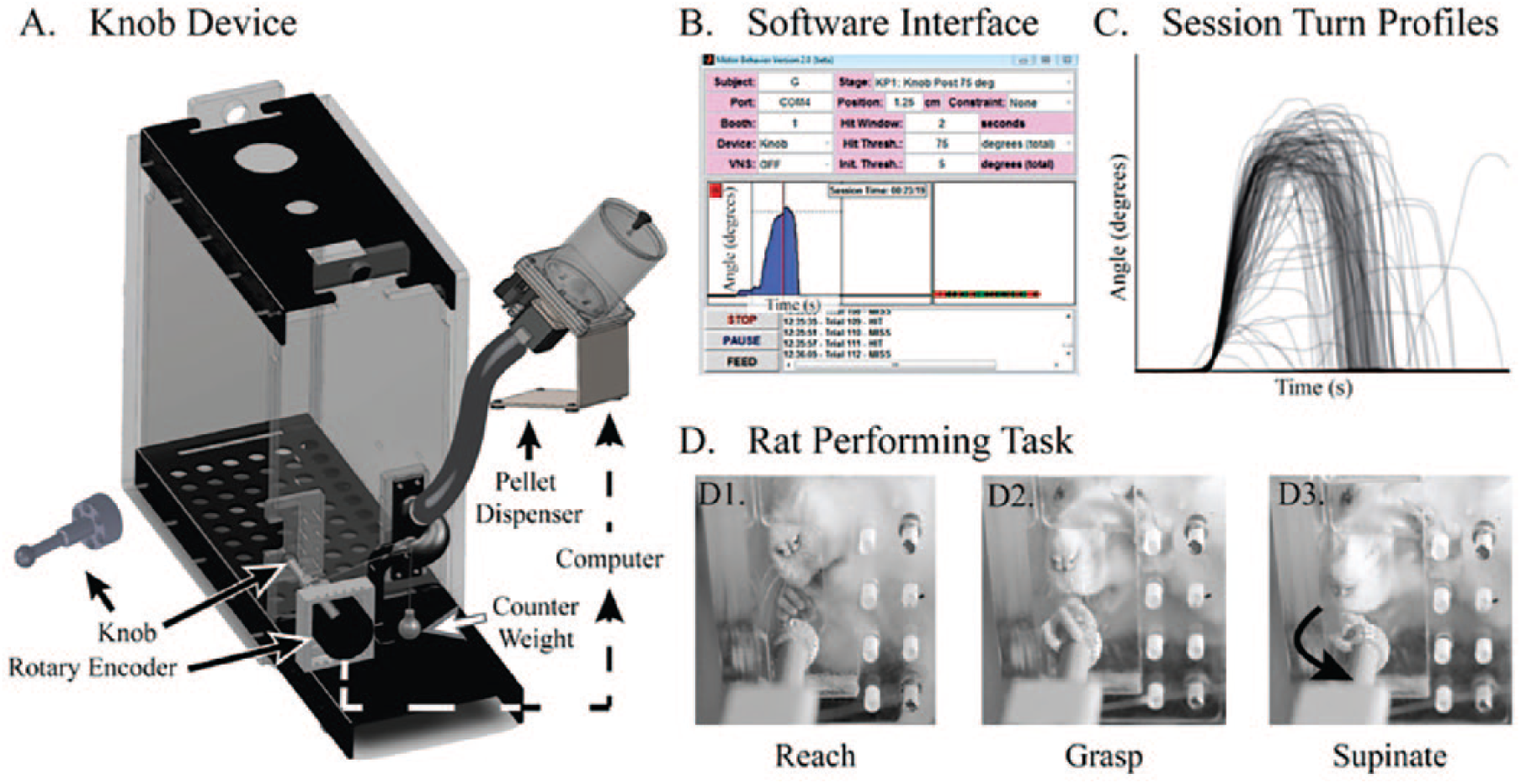
The knob supination task: A. The knob supination device. B. The software user interface. C. Turn profile from a single 30-minute session. D. A rat performing a task: (D1) A rat reaches toward the knob, (D2) grasps it with a precision grip, and (D3) turns it in supination (Courtesy: Sage Publications).
This task showed significant and lasting deficits in rats after unilateral injury to the corticospinal tract, 9 the most important pathway for voluntary movement, whereas the SPRT did not. 1 The isometric pull 41 and the lever 42 tasks are some other examples of manipulandum tasks designed to quantify other specific forelimb movements: the pull task measures the grip strength, and the lever task is used to quantify pressing movement that must be repeated quickly. Besides the specificity offered by these types of tasks, another benefit of this type of tasks is that they can be very sensitive. This is because of the sensors that detect forelimb movements, which can keep track of subtle changes, with a high sampling rate. For example, the knob task can measure angle changes as small as one-fourth of a degree, and position is sampled at 100 Hz.9,28,36 The ability to measure movements at such high resolution is a theoretical advantage at this time because of lack of head-to-head comparisons with manual assessment of movement kinetics.
Another innovation in automated systems is integration of the devices into the home cage. These allow training and testing of rodents in the same cage in which they are housed. An advantage with home cage-based tasks is that animals can engage continuously in the task, allowing quicker habituation and learning. Objective assessments can also be done continuously, which provides a much richer data set about motor learning. All this can be done without human intervention or movement to a testing apparatus. Such conditions limit human interaction and enable standardized protocols within and between laboratories.
The SPRT has been modified into a home cage system. One such iteration, shown in Figure 4, consists of 3 main parts: an APP system, a barrier mechanism to limit access to the pellet presenting platform based on the location of the rat, and sensors that detect the location of the rats. This system allows automation at 3 levels: tracking of animals undergoing training, placing pellets in front of the animals, and the barrier mechanism, which helps reset individual trials by ensuring animals move to the back of the cage between reaches. The authors report that the home cage system was very efficient at training and testing animals; home cage–trained rats were proficient at the task by 5 to 6 days compared with more than 11 days with a manual approach. 43
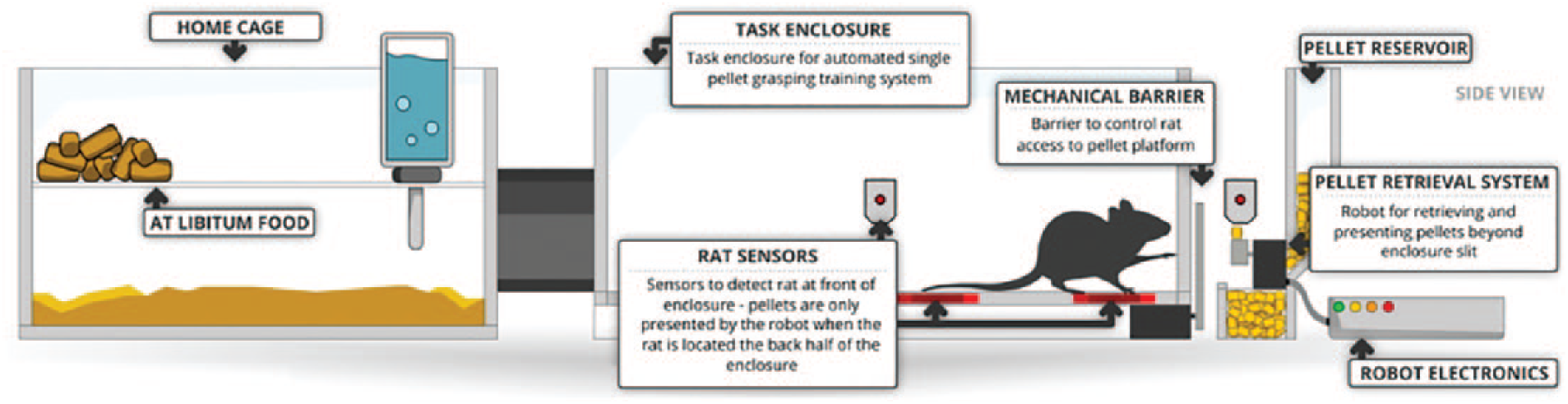
Home cage–based system: Automated training, testing, and analysis of the forelimb reaching task is achieved by connecting the home cage to the task enclosure that is coupled with the automated pellet presenting robot (Courtesy: Elsevier).
Joystick tasks have also been implemented into home cage systems. Joystick tasks are useful because they can track forelimb movements with multiple degrees of freedom, and they can also measure movements with high precision.10,44,45 A joystick is part of a home cage system called the automated rodent training system. 10 The software controlling the system can control multiple home cages simultaneously and independently, using protocols specified by the user. Although designed to control a joystick, the authors designed the software to be flexible to run different types of behavior tasks by writing custom scripts. The capability of automated training and the flexibility to add new behavior tasks makes this system highly modular. However, the authors have yet to add new tasks to take advantage of this modular system, and this should be prioritized in future iterations of the task.
Automated Analysis
Automation can also help in making the data analysis step more robust and efficient. Analyzing data from manual behavior tasks typically involves scoring video recordings after they have been recorded and making judgments about the quality of performance. Many of these steps can be implemented with automated methods. There have been attempts to develop automated analysis using computer vision for reaching and sensor data for tasks involving a manipulandum as well.
Some of the best examples of automated analysis come from automated kinematic data analysis in the SPRT. To quantify the reaching kinematics, a few groups use computer vision to extract kinematics.33-35,46-48 In one such approach, motion tracking was performed by computer vision through machine learning algorithms. 46 Instead of relying on models of rodents reaching and grasping a manipulandum, this method uses a data set from an advanced human pose estimation algorithm called DeeperCut. This tracking system can accurately predict the location of different components of the forelimb, including individual digits. Remarkably, this system reaches a level of accuracy in tracking these body parts that is similar to humans and using only a small number (141) of labeled frames. There are several advantages of using this particular machine learning approach. First, it does not require building a model of the reaching limb to accurately track the position. Also, the approach does not require that markers be placed on the limb, which is less invasive for the animals and easier for the experimenter. In addition, only a small amount of data were needed to train the system accurately, making this method easy to adopt.
A different approach that does not require a model was adopted by another group to study reaching. 34 In this study, video recordings were used to generate a model of the rat paw, an approach adopted by others as well.33-35 Rats are video recorded performing single pellet reaching from the front and the side, and the images are synchronized and combined. 34 These video images are then compared with a 3D model of the paw to estimate the pose. This analysis enables correlation of forelimb impairments with a specific aspect of reaching and allows the determination of movements about multiple joints meaningful to patients, such as multijoint coordination. This would not be possible without a highly quantitative automated method. Despite the advanced computer vision–based approach, this group uses data from only one animal, and as such, this approach has not been widely adopted perhaps owing to complex image processing and automation requirements.
One of the repercussions of collecting data with highly quantitative tools is the large amount of data generated. Analysis methods are being developed to translate voluminous data into sensible outcomes. Dexterity 49 is one example of such software, developed in conjunction with the knob supination task. Dexterity is MATLAB-based software that is capable of handling large data sets and quickly visualizes or prepares the data sets for more complex analysis. This is made possible by a Graphical User Interface, as shown in Figures 5A to 5E, which is designed to be used by even those investigators without advanced MATLAB or computer programming skills. Another main advantage of Dexterity is that even though it was developed for the knob supination task, it can analyze many different types of data, both automated and manual. For example, it has been used to analyze the automated pull task as well as manual tasks such as pasta manipulation, as shown in Figure 5F.
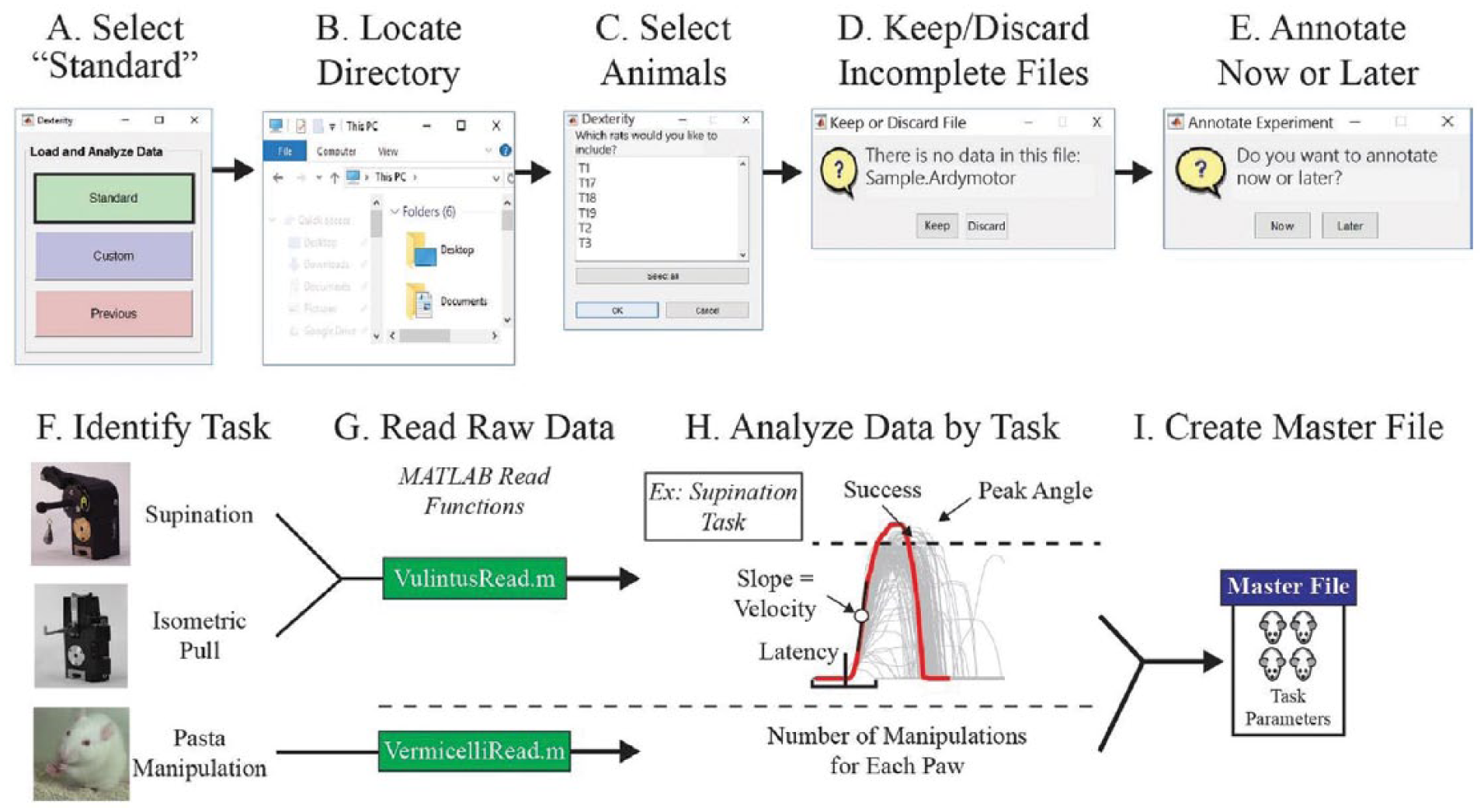
Dexterity software: (A) A user can select between 3 options: “standard,” “custom,” and “previous.” If the user selects “standard,” the user will (B) load in their data, and Dexterity will prompt the user to provide the directory where files are located and (C) select subjects. (D) It will then step through each file and prompt the user to keep or discard files with incomplete or no data. (E) If the user chooses, he or she can annotate their experiment now or later. (F) Dexterity identifies which task it is analyzing, (G) utilizes the appropriate file reading MATLAB function, (H) analyzes that task, and then (I) creates a Master File with all the processed data organized by subject. (Courtesy: Elsevier).
Disadvantages of Automated Tests
The most significant downside of adopting automated tasks is the loss of human observation during behavior training and analysis. The role of observation is particularly important for behavior because unexpected changes are often found. For example, many improvements in function in human 50 and animal models 1 after injury are related to trunk adjustments, and automated tasks are specifically designed only to measure paw or wrist movements. These changes are likely to be picked up by a skilled observer but may go unrecognized with automated methods.
High initial setup cost is another challenge faced by groups adopting automated tasks. The equipment and material required to set up automated systems can be costly compared with manual methods. For example, the knob supination devices are currently priced at $3500 per device. Given the high-throughput design of these tasks, it is not unusual to use several of these devices in a laboratory. Although the long-term savings in personnel more than offset high equipment cost, the initial investment is considerable. The amount of time required to train the animals to proficiency can become a potential downside when using automated devices as well, particularly manipulandum tasks. The main motivation for studying skilled forelimb movements in rodent models is to better understand movement and its neural control. Therefore, it is not surprising that we model human-centric behavior in the rodents such as reach and grasp. Training the rodents to perform unnatural movements such as reaching to grasp a knob can be challenging and time-consuming. Training rodents with automated methods can compound this difficulty because the food reward is not the target of reach. In addition, a human trainer can provide helpful motivation or novelty to a task.
Another downside of adopting automated tasks is the need for dedicated technical and financial resources to maintain and debug such systems. Automated systems are often built with sophisticated hardware and software, and malfunction of these components is unavoidable. To maintain uninterrupted operation in labs, there has to be either a technical expert available on-site to deal with such events or fees must be paid to companies that manufacture these devices and software.
Future Promise
Automated tasks of the future must build on the current advantages of the systems. Although current automated devices measure specific movements with high fidelity, the forelimb has enormous behavioral flexibility, and measurement of even a complicated reach and grasp movement tests only a small portion of the large repertoire. Future automated tasks should incorporate interchangeable modules that can test multiple aspects of forelimb movements. Another advantage in some of the available automated systems is that they allow training and testing in the home cage. The next generation of automated tasks must strive toward systems that can be incorporated into standard cages easily and affordably. Home cage–based systems should also track multiple animals simultaneously to enable social housing. Modular systems should also be compatible with enriched or more natural environments. Finally, future systems should enable testing of natural rodent behaviors—eating, grooming, and exploration—to determine how these behaviors are controlled in health and disease.
Another important priority is to limit the disadvantages in current automated tasks. Most automated tasks use custom-written complex software that can be difficult to adopt and to modify. Similarly, current tasks often rely on custom-built robotic platforms and machinery. Reliance on customized software and hardware necessitates ongoing support of the makers or local expertise to troubleshoot and maintain the complex automated devices. This adds ongoing expense to the high startup costs. Use of simple user interfaces, such as voice activation and touch screens, could make the operation simple and fast. In addition, with sensors now being developed for mass markets, using these components and the control software can simplify devices and make them more affordable. Designing the automated tasks of the future will require using the power of sophisticated technologies such as computer vision and modular robots but with methods that are easy to implement and to scale.
Finally, future automated tasks should use artificial intelligence to continuously improve the systems. One of the current advantages of using automated tasks is the use of computer algorithms that adapt to performance. These algorithms need to be optimized empirically and also need to be updated according to the need of the experiment. For example, the algorithm to optimize training will be different from the algorithm to measure performance. The algorithms may also differ by the type of task, species or strain of rodent, and type of intervention. An intelligent system can also partially address the lack of human observation during automated tasks. Specifically, behavior that is observed to be outside the norms of the system could trigger an alert about forelimb performance or compensatory movements of the body, for example. We imagine that such integrated systems will utilize computer vision to detect and alert users at desired time intervals for feedback. We also envision a smart automated system that learns from such human feedback when problems arise and can suggest steps to solve such problems based on previous feedback. Furthermore, intelligent systems could compare studies in multiple labs to ensure that data are generated in the same way. Having such an automated method to validate data will also encourage wider adoption of these tasks. These systems may, therefore, deepen our understanding of forelimb function through methods that ensure high rigor and reproducibility.
Footnotes
Acknowledgements
We gratefully acknowledge the contribution by Andrew Sloan, PhD, who provided helpful discussions and valuable input on an early draft of the manuscript.
Declaration of Conflicting Interests
The authors declared the following potential conflicts of interest with respect to the research, authorship, and/or publication of this article: JBC served as a consultant to Vulintus, Inc, on NINDS SBIR Grant R44NS086344, which helped develop the knob supination task. JBC owns no shares and has no financial interest in Vulintus, Inc. AS and SDB declare no conflict of interests.
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.