
Abstract
This study aims to validate the optimal posture for the Dumbbell Biceps Curl (DBC) exercise using Textile stretch sensors and Surface Electromyography (sEMG), and then detect inaccurate posture using a Sparse Autoencoder. To validate the optimal DBC exercise posture, we measured the effects of wrist supination and the angle of the upper body and elbow on the biceps and forearm muscles. A wrist sleeve-shaped Textile stretch sensor detects wrist supination, and sEMG measures biceps and forearm muscle activation. The experiment results confirmed that an angle between the upper body and the elbow within 90°, coupled with wrist supination, constitutes the most efficient posture, maximizing the activation of the biceps while minimizing the synergistic effects of the forearm muscles. Subsequently, this posture was learned through a Sparse Autoencoder, and the Root Mean Square Error values of the trained model were lowest in the optimal posture (Biceps: 0.090, Forearm: 0.076). This suggests that Sparse Autoencoder could be useful in identifying inaccurate exercise postures. In summary, this study aims to develop an exercise posture feedback system through the integration of modern exercise physiology and technology, particularly the fusion of AI and sensor technology. The goal is to propose the potential to detect and correct inaccurate or unsafe exercise postures.
Keywords
Introduction
With the increasing awareness of health due to the impact of the COVID-19 pandemic, the number of users in the fitness industry is on the rise. Types of fitness exercises include aerobic exercise, flexibility training, resistance training, isometric exercise, and more. Among these, resistance training offers numerous benefits such as improved physical performance, enhanced motor control, increased walking speed, improved functional independence, enhanced cognitive abilities, and increased self-esteem. Furthermore, resistance training not only increases muscle mass but also aids in the prevention and management of type 2 diabetes and improves cardiovascular health. 1
An example of a basic resistance exercise for strengthening the upper body is the Dumbbell Biceps Curl (DBC). The DBC exercise begins with the elbow joint fully extended. As the dumbbell, gripped in the hand, reaches the upper part of the shoulder by flexing the elbow, the arm is then returned to the starting position by extending the elbow. In this repetitive movement, the most significant muscle contraction occurs in the biceps.
2
Additionally, as an added motion in the DBC exercise, externally rotating the wrist outward (supination) when the dumbbell reaches the upper part of the shoulder maximizes the contraction of the biceps compared to the neutral or pronation states.3,4 Figure 1 describes wrist supination, neutral, and pronation. Wrist supination, neutral, pronation.
The target muscle in the DBC exercise is the biceps brachii, which acts as the agonist. In this context, the forearm muscles, specifically the brachioradialis and flexor carpi radialis, serve as synergists, aiding in the movement. Conversely, the triceps brachii acts as the antagonist.5,6 The relationship among the agonist, antagonist, and synergist muscles plays a crucial role in the interaction of muscles during exercise. The agonist is the muscle most directly involved in initiating and executing a specific movement, while the synergist assists in facilitating the movement and stabilizing the joint. The antagonist is the muscle that opposes the action of the agonist, providing resistance to the exercise and helping regulate the speed and range of movement.
7
Figure 2 illustrates the muscles involved in DBC exercise. Muscles involved in DBC exercise.
There are various methods for measuring the activity of specific muscles during exercise, including sEMG, which involves measuring the electrical signals generated in muscle fibers through surface electrodes, Mechano-myography (MMG), which measures mechanical vibrations associated with muscle contraction and relaxation, Sono-myography (SMG), which uses ultrasound signals to measure muscle activity, and Phono-myography (PMG), which measures muscle activity through sound signals. Among these, sEMG provides insightful information about the degree of muscle activation and the timing of activation, offering insights into muscle contraction force and the correlation between muscles during movement. This method allows for an intuitive understanding of muscle activity and relationships during the execution of movements.8,9
Resistance training, such as DBC, can be beneficial for health management, but it requires special attention to exercise posture as it may lead to muscle fiber damage due to improper muscle loading. This is crucial not only to prevent a decline in the effectiveness of the exercise but also to avoid various injuries that may result from it.10,11 To minimize the risk of injuries, it is important to consider an appropriate exercise intensity and progressively increase it while avoiding overloading the muscles. Integrating a well-rounded health routine that includes various exercises and addressing individual fitness levels and health conditions is essential to minimize the possibility of injury while maximizing the benefits of resistance training. However, in the trend of home training, 12 it is often challenging for users to assess their exercise posture on their own. This is mainly due to the nature of home training, where individuals exercise alone in their own space without the presence of a workout assistant. As the need for a system that allows users to determine the accuracy of their exercise posture is increasing, the use of autoencoders, a type of artificial neural network, can be valuable for assessing normal and abnormal patterns.
The autoencoder, a feature extraction method based on unsupervised learning, possesses the capability to extract abstract features and latent patterns from high-dimensional data. 13 It is effective in tasks such as noise reduction, dimensionality reduction, and reconstruction. Additionally, it has the ability to detect anomalies in signals by comparing the features of the learned data with those of newly input data. 14 Furthermore, autoencoders have various adaptations, including sparse autoencoders, denoising autoencoders, and stacked autoencoders, depending on their intended use. 15
The correct posture for resistance exercise minimizes the load on synergistic muscles while maximizing the load on the agonist muscle (target muscle). Therefore, when the user performs DBC exercises, the optimal posture is expected to emphasize the activation of the biceps muscles compared to other postures, and the synergistic effect of the forearm muscles is likely to decrease. Additionally, introducing wrist supination would further accentuate the activation of the biceps muscles compared to when wrist supination is not added. Finally, by training an autoencoder with the optimal case where biceps muscle activation was highest, it should be possible to differentiate between optimal and suboptimal postures in DBC exercises.
This study aims to validate the optimal posture for the DBC exercise targeting the biceps brachii using Textile stretch sensors and sEMG. Subsequently, our goal is to employ autoencoder algorithms to detect inaccurate postures.
Experiment method
Manufacturing of textile stretch sensors and wrist sleeves
The E-band (KOLON Co., Ltd, Seoul, Republic of Korea), made with a composition ratio of PET/SP (80:20) using spandex and polyester fibers, is knitted in a loop shape, providing strong elasticity and resilience. The E-band itself is a non-conductive textile, but after a dip-coating process with Single-Walled Carbon Nanotubes (SWCNT) ink (0.1 wt%), it becomes a conductive textile stretch sensor. The SWCNT used in the dip-coating process is a cylindrical carbon nanostructure known for its excellent conductivity, commonly used when creating textiles as conductive sensors.16,17
During the dip-coating process, to prevent the incorporation of bubbles and achieve a uniform distribution on the fabric’s surface, the SWCNT ink (0.1 wt%) underwent stirring at a speed of 1000 r/min on a magnetic stirrer for 3 h. After the stirring, the E-band was immersed in the 0.1 wt% water-based SWCNT for 1 h. Subsequently, using a Dipping Padding Machine (DAELIM Lab., Seoul, Republic of Korea), the E-band underwent a padding process, allowing the conductive particles to penetrate deep into the knit structure. The padded E-band was then placed in a two-way drying machine (DAELIM Lab., Seoul, Republic of Korea) to eliminate remaining moisture. The drying process was carried out at a temperature of 100°C for 5 min, with the circulation fan speed set at 1500 r/min. Figure 3 explains the manufacturing process of the stretch sensor. The fabrication process of the SWCNT-PET/SP stretch sensor.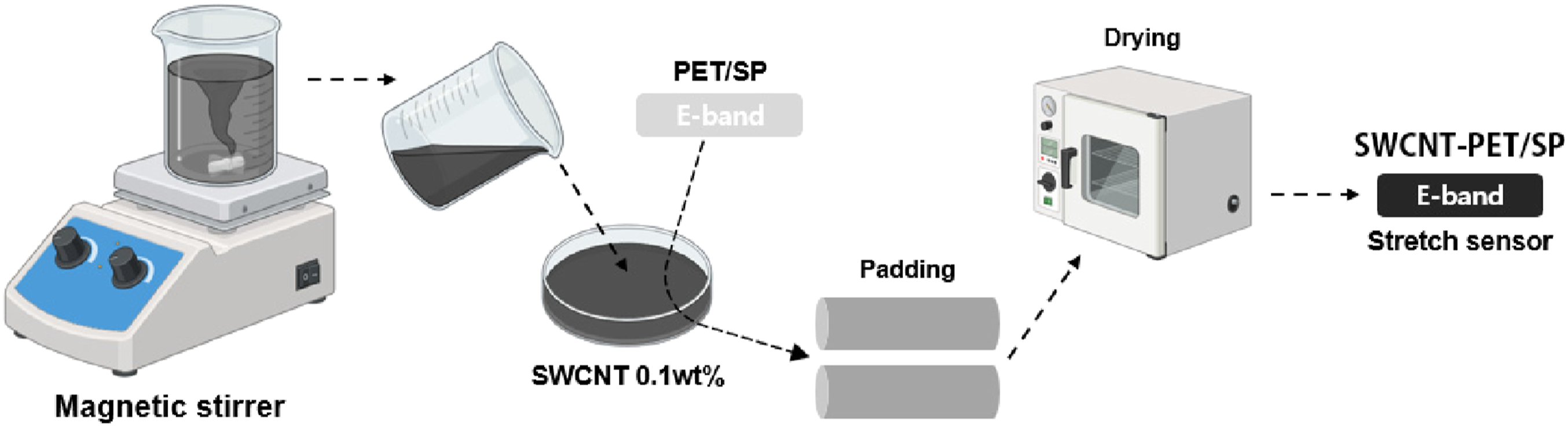
To detect wrist supination, the dip-coated E-band was attached to a wrist sleeve. The E-band was affixed using a heat-transfer sticker from the wrist to the back of the hand. Figure 4 depict actual photographs of the produced wrist sleeve. (a) Manufactured wrist sleeve: Attachment of textile Stretch Sensor from the wrist to the back of the hand. (b) Wrist Supination: Textile Stretch Sensor Expansion.
During wrist supination, the Textile stretch sensor (dip-coated E-band) attached to the sleeve stretches, causing a physical increase in the distance between conductive particles (CNT) within the E-band. Consequently, the measured resistance value is expected to increase (Equation (1)). Figure 5 depicts a microscopic image of the resistive stretch sensor (a) and its sensing mechanism (b). (a) Microscopic image of the Resistive stretch sensor (b) Sensing Mechanism.

Data collection from the resistive stretch sensor was performed using the Analog Discovery2 (Digilent, Pullman, WA), hereafter referred to as the Analog Discovery2. The data was collected at a frequency of 1 kHz from both ends of the sensing part.
sEMG data collection
sEMG is a method of measuring the electrical signals generated by muscle fibers by attaching electrodes to the surface of the skin, recording muscle activity. According to prior research, the target muscle for the DBC exercise is the biceps brachii.2,5,6 Consequently, in the optimal posture, it is anticipated that the amplitude of the sEMG signal attached to the biceps will be emphasized compared to other postures. Simultaneously, the amplitude of the sEMG signal from the synergist forearm muscles is expected to decrease in contrast to the biceps signal.
In this study, two sEMG sensors from the Trigno Research System (Delsys, Inc., Natick, MA, USA) were utilized. One sensor was attached to the biceps, the agonist muscle for the DBC exercise, and the other to the forearm, the synergist muscle. Before attachment, the hair in the respective areas was removed, and any skin oils were wiped away using alcohol pads. Figure 6 depicts the placement of sEMG sensors. Attachment Locations of sEMG Sensors: Biceps and Forearm.
The data from sEMG Sensor was collected using the EMGworks® Software (Delsys, Inc., in Natick, MA., USA), hereafter referred to as the Delsys software, at a sampling frequency of 2 kHz. The sensor resolution was 16 bits, and the inter-sensor latency was less than one sampling period.
Wrist supination experiment
According to previous studies, it is expected that the presence or absence of wrist supination movement will affect the sEMG signals attached to the biceps muscle.3,4 In this context, we intend to use textile stretch sensors to validate wrist supination.
After wearing the manufactured sleeve-type textile stretch sensor on the wrist, sEMG electrodes were attached to the biceps. The DBC exercise was performed for 10 s with five repetitions in the standard form where the upper body and elbow angles formed a 90-degree angle. Measurements were conducted, distinguishing between instances where wrist supination was added and not. Wrist supination was performed as an additional movement when the dumbbell reached the upper part of the shoulder (Figure 7). (a) Non-Wrist supination (b) Wrist supination.
The signals measured from the wrist sleeve were collected through Analog Discovery2, while the signals measured from the biceps were collected through Delsys software. The data collected through these two paths were downsampled to 100 Hz using MATLAB for standardization of time series and data size.
Categorization of DBC exercise postures
After verifying the wrist supination experiment, an experiment was conducted to find the posture with the highest muscle activity in the target muscle by categorizing the angle formed between the upper body and the elbow into three cases. For Case 1 (Inward form), the angle ranged from 60° to 90°, for Case 2 (Standard form), the angle was set at 90°, and for Case 3 (Outward form), the angle ranged from 90° to 120°. Each DBC exercise for each case was repeated 5 times for 10 s per time (Figure 8 and Table 1). During this experiment, sEMG electrodes were attached to the agonist, biceps, and the synergist, forearm, of the DBC exercise. The categorization based on the angle between the upper body and the elbow. Categorization of DBC exercise postures.

The signals measured from the biceps and forearm were collected at a frequency of 2 kHz using Delsys software. To standardize the experiment’s time series and data size, the collected data were downsampled to 100 Hz using MATLAB.
Sparse autoencoder
In this study, we aim to utilize the anomaly detection capability among various effects generated by the autoencoder. The model trained through the autoencoder can compare the features of the learned data during the training process with the features of newly introduced data to identify anomalous signals.
However, due to the nature of sensor data with significant oscillations, there is a risk of overfitting if the model learns all features of the data. Overfitting may occur when the model learns even the detailed patterns or noise in the input data as features, resulting in reduced generalization ability for new data.15,18 At this point, one of the variations of a typical autoencoder, known as Sparse Autoencoder, possesses a characteristic of inducing sparsity in the activation of feature representations. During the training process, the Sparse Autoencoder restricts the activation frequency of neurons in the hidden layer, promoting sparsity. Through this process, the trained model tends to focus attention on the essential features of the input data. Therefore, the Sparse Autoencoder is suitable for learning from sensor data with significant oscillations.
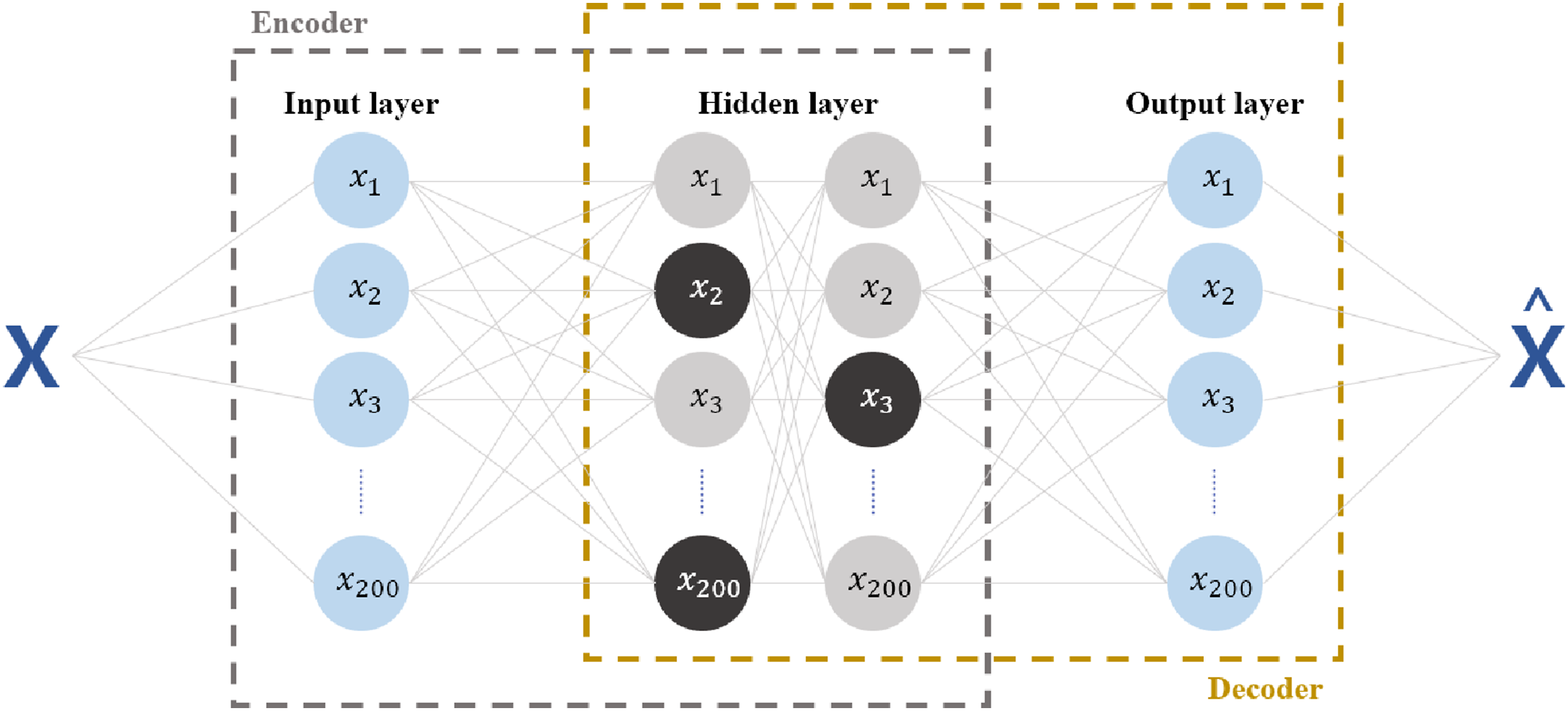
In this study, the sparse autoencoder algorithm provided by MATLAB 2023a (Mathworks Inc., Natick, MA, USA) was utilized. The experiments involved five repetitions of DBC exercises lasting for 10 s each. The data from the stretch sensor and sEMG, measured at 1 kHz and 2 kHz, were downsampled to 100 Hz using MATLAB. Consequently, the size of the time series data used for training was set to 1000. The frame length of the input data was set to 200, representing one cycle of the sensor signal. This means that the input data consists of 200 data points (input nodes), and at each time step of the given time series data, a 200-dimensional vector is obtained. To control the model’s complexity and the size of weight parameters, the coefficient (w) for L2 Regularization was set to 1.0e-10. The learning rate, which adjusts the learning speed and the update size of weights, was set to 1 × 10−6. The number of epochs was set to 15,000 to allow sufficient training to occur, reaching the maximum potential of the learning rate. The size of the hidden layer was set to 200 to strike a balance between the representational capacity of the input data and the complexity of the model. In a sparse autoencoder, all nodes within the hidden layer are constrained as frequencies, so the size of the hidden layer can be the same as that of the input layer. In this case, the sparsity constraint frequency was set to 0.5.
The raw data of sEMG, determined through experiments to identify the optimal posture, is processed with absolute values before being used for training. This was done to address the oscillatory nature of the sEMG signal, which oscillates around the y = 0 line, potentially causing zero-sum issues during the training process. Additionally, within the five repetitions of the experiment, the data corresponding to the last cycle, numbers 800 to 1000, was used for testing the training.
The artificial neural network structure of the sparse autoencoder used in this study consists of two parts: an Encoder and a Decoder, each containing hidden layers. The input data X undergoes min-max scaling to normalize all data within the range of 0 and one before reaching the hidden layers (Equation (2)). The hidden layers generate values using the sigmoid activation function (s) (Equation (3)). Figure 9 illustrates the architecture of this algorithm, with the color difference in nodes of the hidden layer representing activation and deactivation. Autoencoder extracts features from X, compresses them into Y, and restores them back to 

Results and discussion
Stretch sensor analysis: Wrist supination and biceps stimulation
In the experimental results, when wrist supination was not performed, the maximum peak value of the stretch sensor signal was 0.026 (Figure 10(a)), while it increased to 0.456, approximately 17 times higher, when wrist supination was performed (Figure 11(a)). This confirms that the resistance variation of the textile stretch sensor due to physical changes is useful for confirming wrist supination. Non-Wrist supination. (a) Wrist Stretch sensor signal (b) Biceps brachii sEMG signal (c) absolute value of Biceps brachii sEMG signal. Wrist supination. (a) Wrist Stretch sensor signal (b) Biceps brachii sEMG signal (c) absolute value of Biceps brachii sEMG signal.

To quantify the amplitude of the biceps sEMG signal, the Root Mean Square (RMS) values of each graph were calculated (Equation (4)). For non-wrist supination, an RMS value of 0.0537 was obtained, while for wrist supination, it was approximately 1.30 times higher, resulting in an RMS value of 0.0697. In addition, the standard deviation values in the absolute value graphs showed a difference of approximately 1.29 times, with values of 0.0413 and 0.0532, respectively (Figure 10(c)). The reason for using absolute value graphs is that the raw signal oscillates around the y = 0 line, causing it to converge to an average value of 0.
Consequently, it can be concluded that the DBC exercise should include wrist supination in order to provide maximum stimulation to the target muscle, the biceps. In this study, the optimal posture for resistance exercise was defined as the posture with the highest activation of the acting muscle. Therefore, all subsequent experiments included wrist supination.
sEMG data analysis: agonist and synergist
In the experimental results, the standard deviation values of the absolute value graphs for the biceps sEMG signal were highest in Case 1, at 0.108 (Figure 12(a)), compared to 0.053 in Case 2 (Figure 12(b)) and 0.035 in Case 3 (Figure 12(c)). Conversely, the standard deviation values of the absolute value graphs for the forearm muscle sEMG signal were lowest in Case 1, at 0.030 (Figure 13(a)), compared to 0.042 in Case 2 (Figure 13(b)) and 0.061 in Case 3 (Figure 13(c)). Biceps brachii sEMG signal and absolute value (a) Case1 (b) Case2 (c) Case3. Forearm muscles sEMG signal and absolute value (a) Case1 (b) Case2 (c) Case3.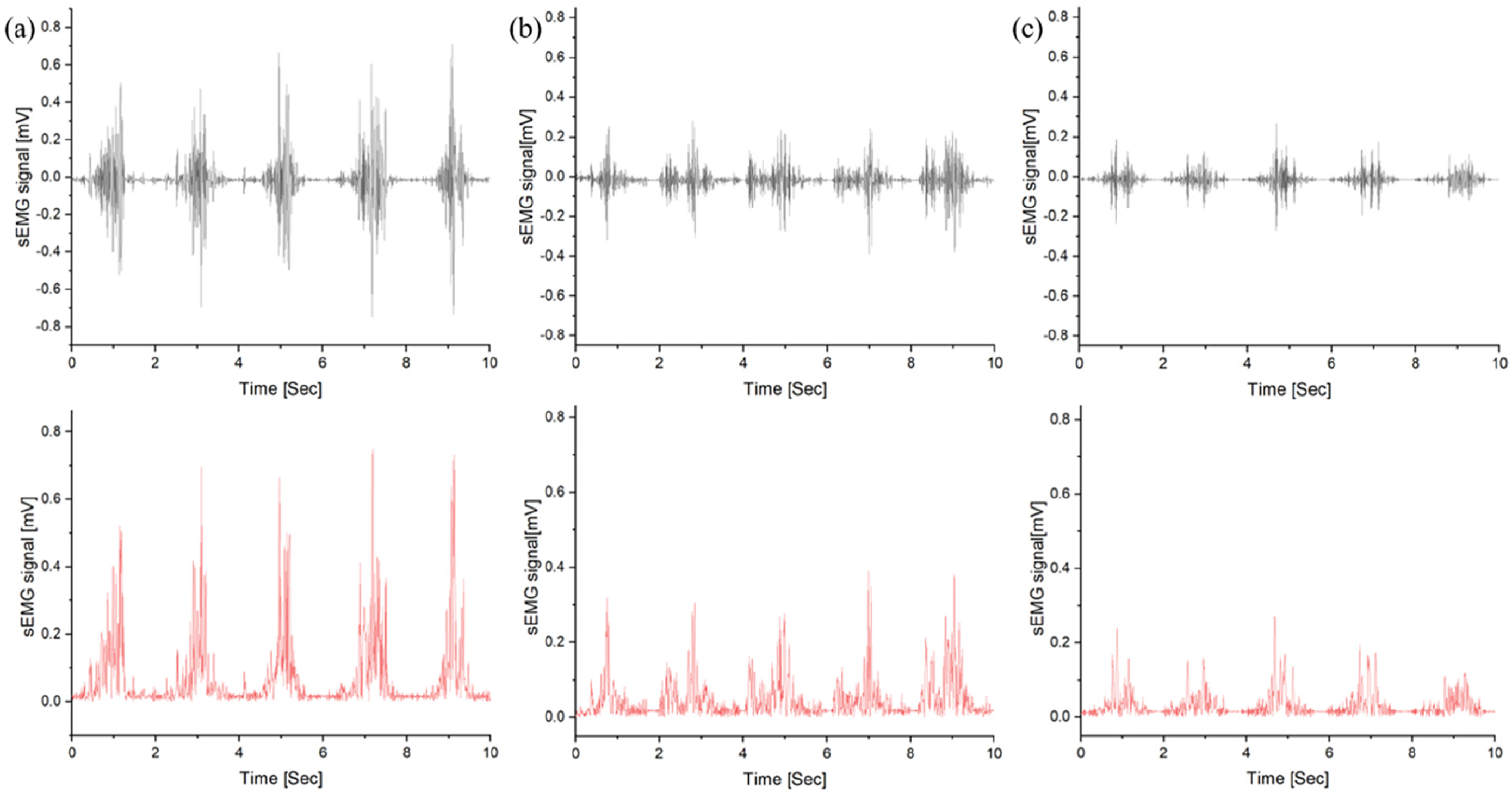
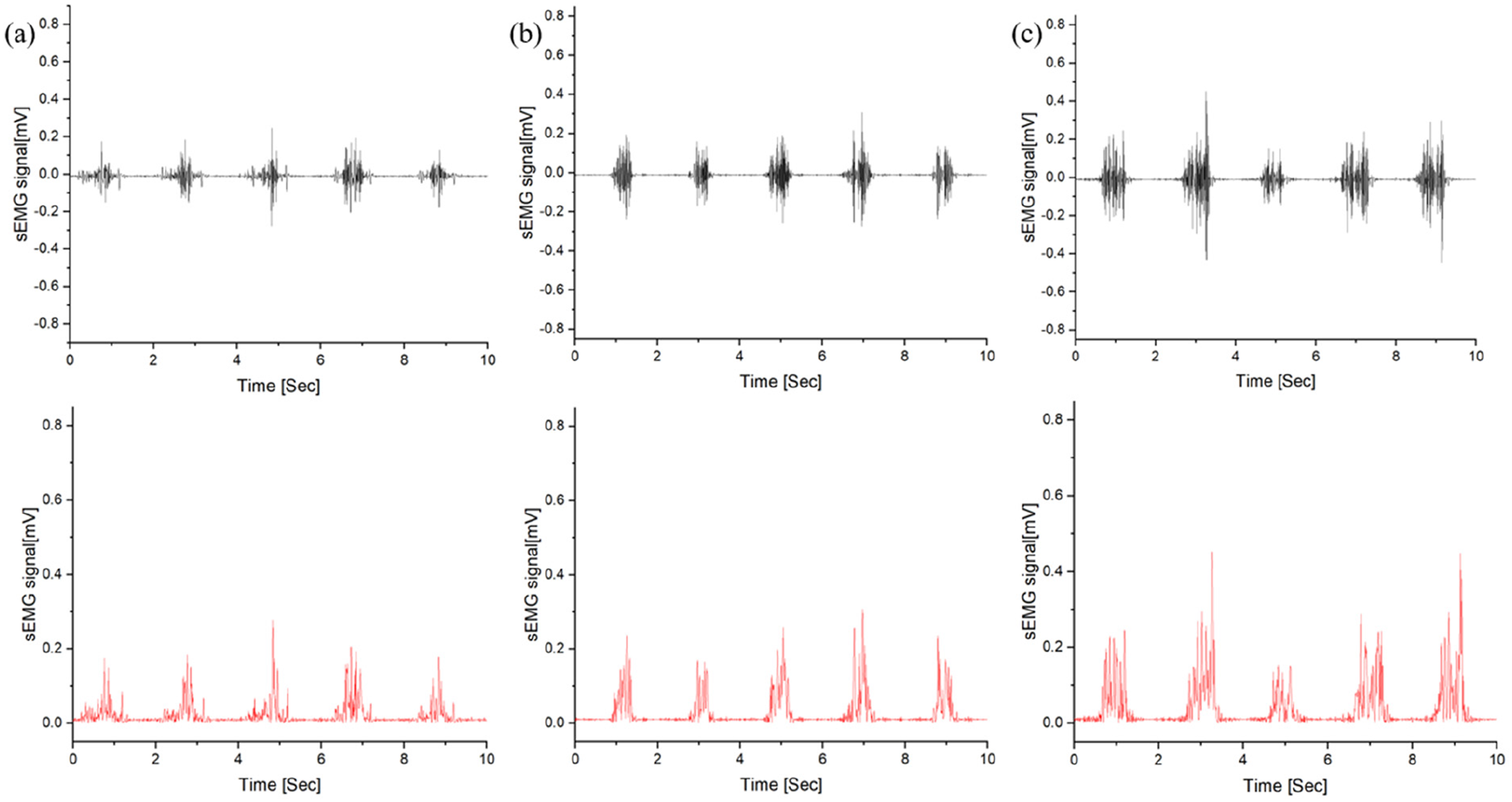
Furthermore, the amplitude values of the biceps and forearm sEMG signals for each case were quantified using RMS (Figure 14). For the biceps, the RMS value was highest in Case 1 at 0.1276 and lowest in Case 3 at 0.0459. For the forearm, the RMS value was highest in Case 3 with 0.0727 and lowest in Case 3 with 0.0370. By comparing the RMS values for each muscle, it was observed that the posture in Case 1 had the most efficient DBC exercise. In conclusion, Case 1 posture emphasized the activation of the target muscle, the agonist biceps, while decreasing the synergistic effect of the forearm muscles compared to the other postures. RMS values comparison for each case.
Consequently, the optimal posture for the DBC exercise is one where the angle formed by the upper body and elbow is directed inward, and an additional movement of wrist supination is introduced when the dumbbell reaches the upper part of the shoulder.
Sparse autoencoder: Detection of anomalous signals
In this study, the Inward Form, where the agonist (biceps brachii) showed the highest muscle activity and the synergist (forearm muscles) showed the lowest activity during the DBC exercise, was considered as the optimal posture. Therefore, the Sparse Autoencoder was trained with the sEMG signal data from Case 1.
The blue lines in Figures 15 and 16 represent the measured raw data, while the orange lines indicate the predicted values obtained through training. The red lines, representing the error, denote the difference between the blue and orange lines. Biceps sEMG Signal: Model Predictions, Actual Graphs, and Errors using Sparse Autoencoder. (a) Case 1 (b) Case 2 (c) Case 3. Forearm muscles sEMG Signal: Model Predictions, Actual Graphs, and Errors using Sparse Autoencoder. (a) Case 1 (b) Case 2 (c) Case 3.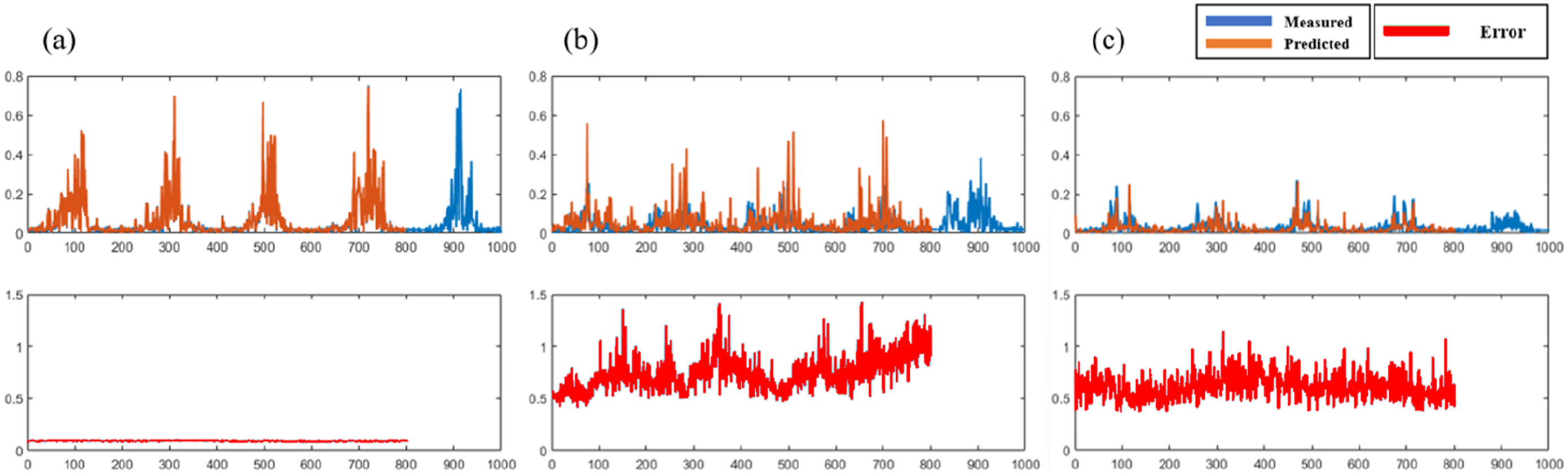

Figure 15 shows the experiment where the Sparse Autoencoder model trained on Case 1 biceps data (Figure 15(a)) was given inputs of Case 2 biceps data (Figure 15(b)) and Case 3 biceps data (Figure 15(c)). Similarly, Figure 16 demonstrates an experiment where the Sparse Autoencoder model trained on Case 1 forearm data (Figure 16(a)) was given inputs of Case 2 forearm data (Figure 16(b)) and Case 3 forearm data (Figure 16(c)).
The experimental results showed that the average error of the Biceps model for Case 1 was very low at 0.09 within the
For the Forearm model, the average error for Case 1 was very low at 0.076 within the
The root mean square error (RMSE) and standard deviation for Case 1, 2, 3.

Mean =
Upon observing Figure 17, it is evident that the Biceps model has a wider average error range than the Forearm model. This difference is attributed to the larger amplitude of the biceps sEMG signal used for training compared to the forearm muscles sEMG signal. Regardless of this reason, the experimental results indicate that the average errors for the potentially incorrect postures (Case 2 and Case 3) are higher than the average error for the optimal posture (Case 1), demonstrating the capability of Sparse Autoencoder in identifying incorrect exercise postures. Error bar graph. (a) Biceps, (b) Forearm.
Conclusions
This study aims to validate the optimal posture for DBC exercise using Textile stretch sensors and sEMG. The validated optimal posture is then trained through Sparse Autoencoder to detect inaccurate exercise postures. The wrist sleeve-type textile stretch sensor was employed to detect wrist supination, while sEMG was used to measure the muscle activation of the biceps and forearm muscles. Wrist supination was expected to increase the activation of the biceps brachii during DBC exercises.
In this study, the optimal posture for resistance exercise was defined as the position where the highest muscle activation was measured in the agonist. To find the optimal posture for DBC exercise, experiments were conducted by varying the angles formed by the upper body and elbow, dividing them into 3 cases (forms Inward, Standard, and Outward). Ultimately, it was confirmed that the posture with an angle within 90° between the upper body and elbow maximized biceps activation and minimized the synergistic effect of forearm muscles, making it the most efficient posture.
Additionally, the identified optimal posture was trained using Sparse Autoencoder, and the model was used to detect inaccurate exercise postures by comparing them with other postures. The average error value of the trained model was lowest in the optimal posture, demonstrating the utility of Sparse Autoencoder in identifying inaccurate exercise postures.
In summary, this study suggests the development of an exercise posture feedback system through the integration of modern exercise physiology and technology, particularly combining AI and sensor technology. This system has the potential to detect and correct inaccurate or unsafe exercise postures, showcasing the possibilities of technology in enhancing exercise performance and safety.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was partly supported by the Technology Innovation Program (or Industrial Strategic Technology Development Program-Materials/Parts Package Type) (20016038, Development of the textile-IT converged digital sensor modules for smart wear to monitor bio and activity signals in exercise, and KS standard) funded by the Ministry of Trade, Industry and Energy (MOTIE, Republic of Korea) and the Korea Institute for Advancement of Technology (KIAT) grant funded by the Korea Government (MOTIE) (P0012770, The Competency Development Program for Industry Specialist).