
Abstract
Silicone elastomers, for example, polydimethylsiloxane (PDMS), have been widely used as cross-linkers for fabrication of flexible strain sensors. They not only lend strong adhesion to adjacent materials, for example, porous fabrics, but also tune their elastic property. Silicone elastomer precursors, which are typical non-Newtonian fluids, can easily penetrate into porous fabrics, driven by the capillary effects of fibers. Unfortunately, such a penetration has negative effects on both adhesion strength and elastic property of PDMS, thus limiting their applications. Here we report a facile method for preparing uniform silicone elastomer films, that is, PDMS, on between porous media via controlling the hydrodynamics of elastomer precursors. Our experiments show that the hydrodynamics of elastomer precursors can be easily controlled by modulating the pre-curing time of PDMS precursors to prevent them from penetration into porous media but keep their high adhesion. Based on this hydrodynamic modulation of PDMS precursors, we firmly adhere conductive silver nanowires (AgNWs) onto knitted fabrics, and further combine composites with common clothing from the point of view of ergonomics, showing the possibility of applying such a modulation to the fabrication of wearable strain sensors. Our findings not only present an understanding of liquid transport in porous media, but also provide a novel method of controlling the hydrodynamics of elastomer precursors in porous media for achieving the effective wearable sensors.
Introduction
Silicone elastomers, for example, Polydimethylsiloxane (PDMS) and Ecoflex, are considered as promising candidates for serving as substrates or carriers of active materials due to properties of good flexibility, low young’s modulus, viscoelastic behavior, and physical/chemical stabilities.1–4 Silicone elastomers are often combined with conductive materials to achieve the desired functions.5–7 For example, the stretchable circuit board was usually fabricated by transferring silver nanowires (AgNWs) from a hydrophilic membrane onto a PDMS substrate. 8 Stretchable electrodes were prepared by depositing the gold layer on the top of PDMS precursors. 9 Strain sensors were prepared by adhering silicon nanowires 10 or liquid metal 11 onto the semi-cured PDMS. Pressure sensors12–14 and transparent conductive films 15 were also prepared by using PDMS as a matrix. In addition, PDMS is widely used in microfluidics,16–18 medical devices,19,20 gas separation 21 and molecule detection.22,23
PDMS precursor is a typical type of non-Newtonian fluids, which would transform from liquid to elastomers during curing process. However, when the PDMS precursor is applied onto porous media, such as fabrics, penetration caused by the capillary effect is inevitable, which would cause negative effects on its applications. For example, the phase change of the penetrated PDMS would weaken the adhesion of PDMS elastomers to fabrics; the elastic properties of the composites would be negatively affected by the mismatch of Young’s modules of the penetrated PDMS elastomers and fabrics, as well as the dissipating mechanical energy. 24
Active materials are essential in fabrication of flexible sensors, for example, carbon-based nanomaterials, conductive polymers, and metal nanowires.25–27 However, carbon-based nanomaterials, for example, carbon nanotubes and graphene, remain debated toxicity to human beings 28 ; conductive polymers, for example, polyaniline and polypyrrole, usually experience a very complicated synthesis process but have a low conductivity. 29 Metal nanowires are increasingly popular in the fabrication of flexible sensors. 30 Especially, AgNWs have received widespread attention due to high conductivity, excellent optoelectronic properties, and low sheet resistance.31–33
Here we report a facile method to fabricate uniform PDMS films on porous substrates by controlling the hydrodynamics of PDMS precursors. Our experiments demonstrate that pre-curing time of the PDMS precursor at 20 min can effectively prevent the penetration of the precursor into the porous media but keeping excellent adhesion and elastic properties. Based on this method, we successfully achieve the strong adhesion of conductive silver nanowires (AgNWs) onto knitted fabrics and fabricate flexible strain sensors with high sensitivity. Further, we seamlessly integrate these sensors into common clothing by considering ergonomics, to show the possibility of fabricating wearable strain sensors.
Materials and methods
Materials and apparatus
AgNWs (10 mg/mL, 50 nm × 50 μm) were purchased from Nanochem Guangzhou. Sylgard 184 (Dow Corning) was used to prepare PDMS. The knitted fabrics (composition: 80% polyester and 20% spandex, fabric weight: 220 g) with organization of interlock stitch were purchased from Donghai Textiles in Hangzhou Sijiqing. Conductive copper tapes, in a width of 2.5 mm and a thickness of 0.01 mm, were obtained from Wangxing Digital. The “base” (PDMS prepolymer) and “curing agent” of Sylgard 184 were mixed by a LC-MSA-HD magnetically stirring apparatus from LICHEN. A FLUKE multimeter (15B+) was used to measure the resistance of sensors. An electronic strength machine (YG026PC-250) provided by Wenzhou Fangyuan Instrument was employed to apply uniform stretching and releasing cycles to the sensors. The morphologies and structures of the composite of PDMS and fabric were captured by using an optical microscope (MIT500).
Methods
Hydrodynamic control of PDMS
PDMS precursor was prepared by mixing the “base” and “curing agent” of Sylgard 184 with a ratio of 10:1 by weight. The mixture was magnetically stirred for 30 min and placed in the room temperature for 1 h to remove the bubbles. Semi-cured PDMS sample was obtained by coating PDMS onto a glass slide and positioning it in a constant-temperature oven at 60°C. The PDMS, with pre-curing time of 0 min, 10 min, and 20 min, was respectively adhered beneath fabrics and cured in an oven at 60°C for 2 h. An optical microscope was employed to observe the cross-section of composite of PDMS and fabric.
Fabrication of strain sensor
Figure 1 depicts the fabrication process of flexible strain sensor: (1) Fabrication of strain sensor Schematics of fabrication of strain sensor. The PDMS precursor was coated on the dried AgNWs pattern to prepare an AgNWs/PDMS conductive film as sensor section; The knitted fabric was adhered to PDMS pre-cured for 20 min to prepare a PDMS film on the porous fabric surface; The semi-cured PDMS with copper tapes was used as the adhesive layer to incorporate the interface of two sections.

The suspension of AgNWs was deposited onto a glass slide in a square pattern (0.3 cm (2) Fabrication of PDMS film on fabric
Fabrics were purified by being magnetic stirred in deionized water and drying at room temperature. Semi-cured PDMS was prepared by uniformly coating PDMS precursor onto the glass slide and curing at 60°C for 20 min. Subsequently, the porous knitted fabric was adhered the semi-cured PDMS layer with no gaps. After curing for 2 h, the glass slide was separated with the fabric, leaving the PDMS film on the fabric. (3) Interfacial incorporation
Another layer of semi-cured PDMS, with a curing time of 20 min, was adhered to the PDMS film on the fabric for encapsulation of AgNWs/PDMS conductive composite film, followed by attaching conductive copper tapes onto two ends of the semi-cured PDMS to output electrical signals. Strain sensor was obtained through buckling the AgNWs/PDMS conductive composite film to the semi-cured PDMS layer and curing at 60°C for 2 h.
Performance testing
(1) Strain sensing performance
An electronic strength machine was used to clamp two ends of the sensor, which applied to the sample uniform stretch and release. The initial distance between the two clamps was set to 40 mm. The constant stretching and releasing rates were v = 10 mm/min for evaluating the strain-sensing characteristic of sensors at both low strain (ε = 10%) and high strain (ε = 50%) states. (2) Cycling response performance
The stretching and releasing cycles were set to 5 times with 20 s of initial and load holding time. Stretching and releasing rate was applied at v = 10 mm/min to test the cycling response performance of sensor samples. (3) Practical application
The flexible strain sensor was combined with a fitting sleeve made by knitted fabric for motion detection of human arm. A multimeter was used to record resistance of the sensor during bending and stretching movements of the human arm.
Results and discussion
Hydrodynamic control of PDMS
Figure 2 shows the penetration of PDMS precursor on porous knitted fabrics under different pre-curing times. When the pre-curing time was controlled at 0 min and 10 min, the PDMS precursor penetrated into the fabric and wetted the reverse side of the fabric, as shown in Figure 2(a) and (b). However, when the pre-curing time was controlled at 20 min, the PDMS precursors only aggregated on the obverse side of the fabric, as illustrated in Figure 2(c). These experimental results indicate that the optimized pre-curing time of PDMS is 20 min for preventing the penetration of PDMS precursor into fabrics. Knitted fabric with different pre-curing time of PDMS precursor at: (a) 0 min; (b) 10 min and (c) 20 min.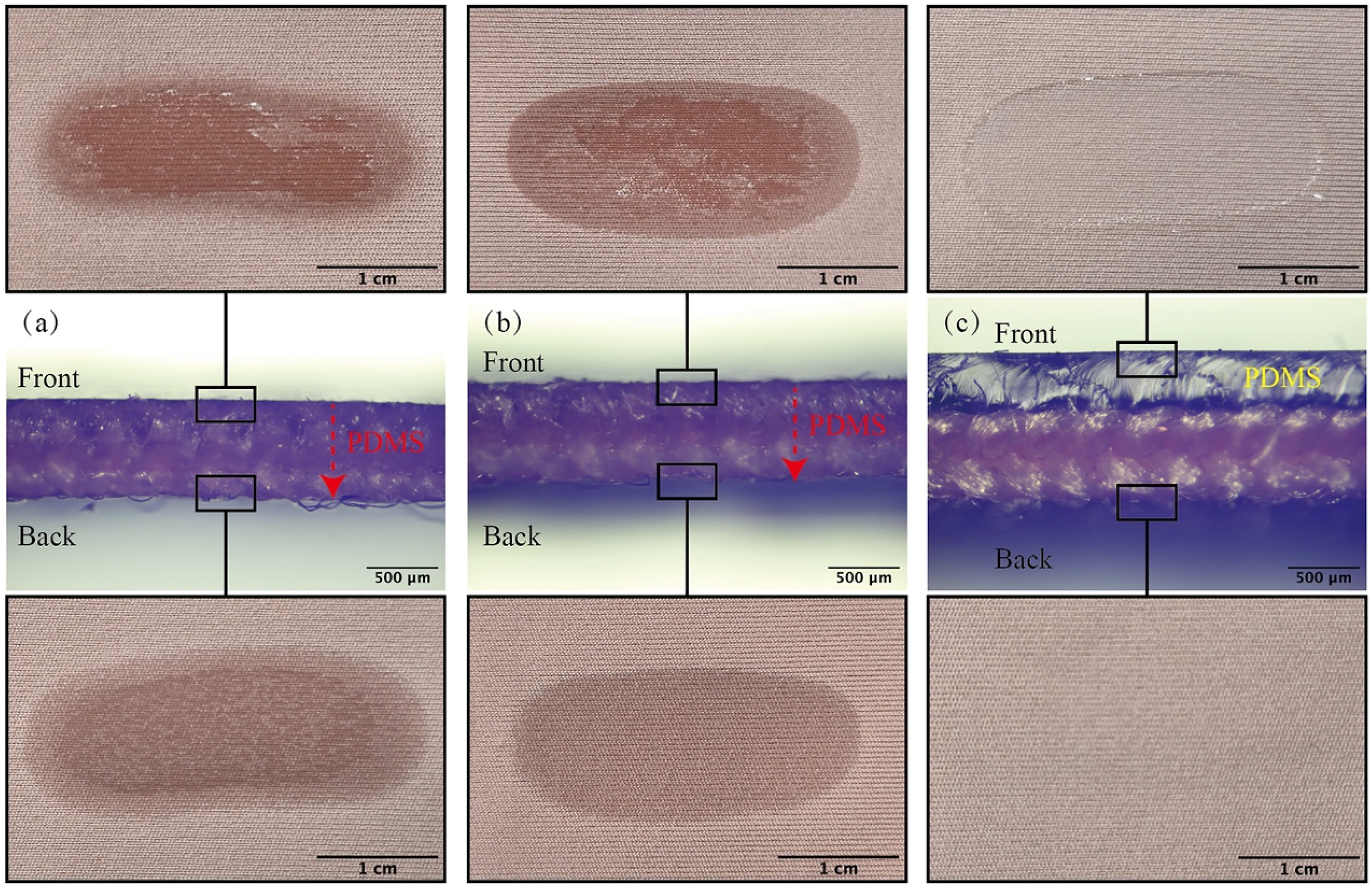
Composite mechanism
The penetration of PDMS precursor into porous fabric can be analyzed by observing the absorption within fibers and the intermolecular interactions of the polymer molecules. The phenomenon of liquid flow under its capillary pressure can be described using the Lucas-Washburn equation:

According to equation (1),
The network structure of PDMS is formed by the reaction between vinyl groups at the terminal ends of a PDMS macromer and the silicon hydride groups present along another PDMS macromer backbone, 34 which imparts PDMS exceptional elasticity and flexibility. As crosslinking reaction in PDMS begins, covalent bonding enhances intermolecular cohesion, thereby increasing viscosity of PDMS. 35 Capillary infiltration occurs due to adhesive forces between polymer molecules and fibers that surpass intermolecular cohesion, thus strengthening the intermolecular cohesion can effectively reduce the capillary effect. 36 The viscosity of PDMS was controlled within specific limits by modulating the curing time of the PDMS precursor, restricting its uncontrolled penetration and diffusion within the fabrics, which ensures that PDMS film conformally embedded between the fibers of the knitted fabric surface.
Sensor structure
To investigate the composite structure of strain sensor, we employed the optical microscope to image the cross-sectional structure. As the curing process initiates, the AgNWs gradually become immobilized within the PDMS three-dimensional network, eventually forming a AgNWs/PDMS conductive composite film.
37
The sandwich structure of the flexible strain sensor is clearly depicted in Figure 3. The fabric organization is interlock stitch, which has excellent elastic properties, and the stretch rate of this fabric can be 100%. More details on the structure of knitted fabric and the initial resistance can be seen in the Supplementary Information (Supplementary Figure 1 and Supplementary Table 1). Cross-section structure of the strain sensor imaged by an optical microscope.
Performance analysis of sensor
Response to strain
The ratio of the resistance of the strain sensor, when it is suffering from the stretching and releasing process, was calculated by dividing the initial resistance ( Variation of resistances of the strain sensors under different strain rates.
To further quantify the sensitivity of flexible strain sensors, we introduce the concept of gauge factor (GF). 39 The equation of GF is explained in the supplementary information (Supplementary Equation 1). The difference in relative resistance ratio changes can be used to assess the performance of the sensors under different strain conditions. 40
Gauge factor of sensors under different strain rates.

Response to cyclic loading
The consistency between the relative resistance changes and strain waveforms was assessed for evaluation of cycling response performance.
43
As depicted in Figure 5, a high level of consistency is observed between the two lines of the relative resistance changes and strain waveforms, illustrating the sensor’s rapid response speed to strain and its excellent response reliability. The variation of sensor relative resistance over time during cyclic loading: (a) cyclic loading of 10% strain; (b) cyclic loading of 50% strain.
The repeatability of strain sensor reflects the capability to regain original characteristics under stretching and releasing cycles. In this experiment, the AgNWs/PDMS conductive layer was encapsulated by semi-cured PDMS. As illustrated in Figure 5, the relative resistance ratio nearly returns to its initial state after each stretching and releasing cycle, affirming the effective protection of the AgNWs/PDMS conductive network by semi-cured PDMS layer.
The degree of variation of GF values relative to their mean for each strain response is depicted in Figure 6. The standard deviation (S) of the GF over five cycles were calculated to demonstrate the stable sensitivity of the sensor over multiple stretching and releasing cycles. The formula for calculating the standard deviation is shown in the Supplementary Information (Supplementary Equation 2 and 3). The low standard deviation proves that the GF exhibits small fluctuations during the stretching and releasing cycles, indicating good cyclic response stability of the sensors. Variation trend of the gauge factor of the sensors during the stretching and releasing cycles.
Application of strain sensors on sleeve
We created a well-fitted sleeve with −10% looseness ratio made by the knitted fabric. More details on the sleeve patterns and process of preparing the sleeve are involved in the Supplementary Information (Supplementary Figure 2). Based on ergonomics, wearable sensors are typically designed at the place with maximum skin elongation during movement, ensuring precise detection. Thus, the place of the sensor was designed at the elbow joint to detect bending and stretching movements of the arm. The process of designing the position of sensor on the sleeve is explained in the Supplementary Information. The wearing effect is displayed in Figure 7. The sleeve combined with a strain sensor.
Real-time monitoring result of the sensor is presented in Figure 8(a), while the movement of the human arm is depicted in Figure 8(b). The GF of the sensor during the first and second arm bending and stretching movements is 5.19 and 5.02, respectively, with only a marginal 3.27% reduction, which demonstrates the sensor’s good sensitivity and stability in practical application. The relative resistance ratio ( Motion detection of an arm: (a) Relative resistance variation waveform; (b) Illustration of arm movements.
Conclusion
In summary, we have reported a facile method for preparing silicone elastomer films, i.e., PDMS, onto the porous medium through controlling the hydrodynamics of elastomer precursors. We have demonstrated that the penetration of PDMS precursor into the porous medium would be prevented by controlling the hydrodynamics of PDMS precursor via modulating the pre-curing time. We have further demonstrated the application of this method in sensor fabrication by using the pre-cured PDMS to firmly adhere AgNWs onto knitted fabrics and integrating the sensors onto a sleeve for motion detection. Our work not only offer an new understanding of fluid transport of elastomer precursors on porous media, but also provides a novel methodology to regulate the hydrodynamics of elastomer precursors within porous media.
Supplemental Material
Supplemental Material - Hydrodynamic control of silicone elastomers on between porous media
Supplemental Material for Hydrodynamic control of silicone elastomers on between porous media by Zhengyuan Ma, Ruoyang Chen, Yixiao Qu, Yuan Kong, Kami Hu, Qin Zhou, Siye Xu, Ziyue Yan, Yunchu Yang and Hui He in Journal of Industrial Textiles
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is sponsored by Shanghai Pujiang Program (No. 23PJ1401800); The Science Foundation of Zhejiang Sci-Tech University (ZSTU) (No. 22192136-Y); China National University Student Innovation & Entrepreneurship Development Program (No. 202310338029); Scientific Research Fund of Zhejiang Provincial Education Department (No. Y202354119).
Supplemental Material
Supplemental material for this article is available online.
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.