
Abstract
Smart wearable electronic devices with superb sensing performance have aroused superb attention in recent years. However, designing an admirable strain sensor with the excellent balance between superior sensitivity and excellent stretchability remains a major challenge. Herein, we developed a conductive polydopamine-coated poly (ethylene terephthalate)/polyurethane fabric as the wearable strain sensor with the layered generating structure and the cooperative effect of carboxylated carbon nanotubes and reduced graphene oxide via self-assembly intercalation process. Obviously, the cooperative conductive effect of conductive fillers endowed the fabric with a superb integration of tunable strain sensitivity (0–265.48), outstanding electromechanical performance, great stretchability (0–220%), excellent heating performance, and long-term stability and repeatability under different strains over 2500 cycles. Especially, the as-prepared sensor was used for the detection of tiny body movements and vigorous human motions, indicating its further impressive prospect in wearable smart electronics. Therefore, such the proposed sensor with the layered generating structure exhibited remarkable potential for developing the flexible wearable electronic device of integrated sensing property and excellent electromechanical performance.
Keywords
Introduction
Smart wearable electronic devices with superb sensing performance and excellent electromechanical stability. They have aroused considerable attention on account of their promising prospects in smart robots, 1 electronic skin, 2 sensors, 3 and human movement monitoring recently. 4 Among them, flexible strain sensors have extensively been investigated to detect diverse activities while healthcare problems and the preparation of these desirable strain sensors are of substantive importance in meeting various requirements containing tunable sensitivity, excellent stretchability, superb electrical heating performance. 5 The currently fabricated methods of flexible strain sensors are mainly by coating conductive fillers containing carbon nanotubes (CNTs), 6 reduced graphene oxide (rGO) 7 onto the surface of elastomeric substrates8–10 including textile, thermoplastic polyurethane (TPU) via chemical/physical treatment techniques. As an example, a facial fabrication 11 of the thermoplastic polyurethane (TPU) coated with rGO, which possessed excellent electrical property but the comparatively inferior GF (gauge factor) 11 and 79 in a sensing range of 0–10%, 10–100% respectively by the ultrasonication technique. Likewise, Yang et al. reported a wearable sensor 12 with a low sensitivity of 26 at a strain of 0–14% fabricated by growing rGO onto polyester knitted textile to monitor body motions. Additionally, Ren et al. developed a conductive rGO-anchored polyester fabric 13 with negative resistance variation and a strain range of 0–8 % via the thermal reduction process. But the developed strain sensor did not present a substantial promising application owing to the high thermal reduction temperature and the inferior stretchability in wearable electronic devices. Other sensors, especially developed elastic substrates with CNTs sheets, 14 displayed poor sensitivity and low stretchability. Thus, designing an admirable strain sensor remains a major challenge by structure design.
In recent years, researchers have effectively solved the above problems by designing the microstructure of the sensing layer of flexible strain sensor. One of the excellent approaches to solve this problem is incorporating some conductive fillers to construct a more stable and cooperative conductive network structure on the elastomeric substrate surface and to improve the sensing performance, such as carboxylated carbon nanotubes (CNTs-COOH), rGO. The reasonable design of the conductive layer presents a new opportunity for gaining tunable sensitivity while retaining excellent stretchability in such cooperative layered strain sensors with CNTs and rGO. Recently, some flexible strain sensors based on the flexible substrate with the synergistic laminated conductive network structure have attracted tremendous attention from researchers. For instance, Shi et al. designed a flexible strain sensor with graphene-bridged CNTs via the drop-casting process, which achieved high sensitivity but comparatively low stretchability. 15 Liu et al. 16 developed successively the thermoplastic polyurethane (TPU) decorated with CNTs and rGO for wearable strain sensors through a dip-coating approach, but the proposed strain sensor with the narrow strain range of 0–30% exhibited poor conductivity because of the low deposition of fillers on the TPU surface. Some other strain sensors with the cooperative effect of CNTs and rGO have been prepared via some microstructure design techniques containing blending, 17 surface generating, 18 or other approaches.19,20 While they could hardly obtain both outstanding stretchability and tunable sensitivity. Therefore, it is still a challenge to prepare high-performance flexible sensors with microstructure design by simple processes. In addition, the superb adhesion between flexible substrates and conductive fillers was vital prospect in the development of flexible wearable electronic devices. Polydopamine (PDA)21–24 with many functional groups including catechol, amine, and imine largely enhances the adhesion of conductive layer on the flexible matrix surface. Meanwhile, the interaction between CNTs-COOH and rGO improves the dispersion of entangled rGO and CNTs-COOH themselves, thus forming synergistic conductive network structure, which leads to the improvement of mechanical and electrical performances.25,26
Herein, we proposed the combination of facile layered generating structure and collaborative effect of CNTs-COOH and rGO on the strain sensor surface via self-assembly intercalation technique. The inherent performance of poly (ethylene terephthalate)/polyurethane (PET/PU) fabric endowed outstanding physical property, and the PDA, as a versatile platform, demonstrated the superior adhesion on the PET/PU fabric surface. Subsequently, CNTs-COOH and rGO were evenly and constantly generated on the PDA-grown PET/PU fabric surface through the strong bonding. Finally, Strain sensing properties, human motion characteristics, workable strain response mechanism, electromechanical and electrothermal performances of the sensor were studied. Impressively, the obtained sensor revealed tunable strain sensitivity (0–265.48), great stretchability (0–220%), and outstanding stability and repeatability over 2500 cycles, superb stability under various strain ranges, fascinating electromechanical and electrothermal performances. More importantly, such the as-prepared strain sensor with excellent stretchability and tunable sensitivity by a feasible method, which enables it to detect tiny body movements and robust human motions as wearable strain sensors integrating multifunction.
Experimental
Materials
PET/PU fabrics were supplied from Wujiang Shuntai Textile Co., Ltd., Suzhou, China. Dopamine hydrochloride was Sinopharm Chemical Reagent Co., Ltd, China. Carbon nanotubes and GO were obtained from Suzhou Tanfeng Graphene Technology Co., Ltd, China. L-ascorbic acid (LAA) was purchased from Shanghai Titan Technology Co., Ltd.
Preparation of PDA-templated PPFs
PET/PU fabrics (PPFs) were added into the mixed solution with dopamine solution (1.5 mg/mL) and a tris buffer solution (0.5 M) stirring (75 r/min) for 12 h. Subsequently, these fabrics were washed with water and dried at 80°C.
Fabrication of GCPPPFs
PPPFs (1 × 6 cm2) were soaked in a Teflon container with GO dispersions (20 mM) and CNTs-COOH (25 mM) (GCPPPFs) with ultrasonic treatment for 15 min at 55°C. Subsequently, the obtained sample with GO was soaked in L-ascorbic acid solution (35 mM) for 20 min at 85°C to reduce the GO on the sample surface. Finally, PPPFs containing CNTs-COOH and rGO (GCPPPFs) were washed with water and dried at 60°C. The preparation process of GCPPPFs is depicted in Figure 1. Schematics for the preparation of GCPPPF.
Characterization and measurements
Scanning electron microscopy (SEM, FE-SEM, JEOL JSM-7500F) was conducted to observe the surface morphology. The Swiss TEXTEST FX 3150 fabric moisture permeability tester was used to measure the moisture permeability of PET/PU fabric before and after modification, which was determined in accordance with the GB/T 12704. 1-2009 Moisture Permeability of Textile Fabrics standards. YG461Z full-automatic air permeability tester is used to perform the air permeability of PET/PU fabric before and after modification. It was determined in accordance with the GB/T 5453-1997 Determination of Air Permeability of Textile Fabrics. X-ray photoelectron spectroscopy was performed to investigate the surface chemical states. The thermal performances of GCPPPFs were demonstrated by thermal gravimetric analysis (TGA) (TGA-Q500, TA Instruments Corporation, USA), dynamic mechanical analyzer (TA: DMA Q 800, TA Instruments, New Castle, DE, USA), and DSC analyzer (Mettler Toledo, Mettler Toledo, Columbus, OH, USA). The relative change in electrical resistance was measured by the formula

Results and discussion
Material preparation
We developed a sensor with a facile layered generating conductive network structure (Figure 2(a) and Figure S1). The incorporation of PDA with many functional groups including catechol, amine, and imine endowed the flexible matrix with exceptional interface adhesion effect via self-assembly. CNTs-COOH and rGO were subsequently grown on the PPPF surface via the dip-coating process (Figure S2). Thus, the deposition of the PDA served as a superb nanocarrier for the generating of CNTs-COOH and rGO, and acted as plenty of cross-linking points to improve the uniform distribution of conductive fillers. As the strain was applied, rGO served as a hub via point-line mode, which formed numerous connection points
27
and led to more effective stress transfer (Figures 2(b) and (c) and Figure S3). This thus improved the uniformity of sensitive materials on the PPPF surface and constructed the more stable synergistic conductive network. (a) The preparation process of GCPPPFs, (b) The generating process of CNTs-COOH, (c) The growing process of rGO@CNTs-COOH on the sensor surface.
Electro-mechanical property
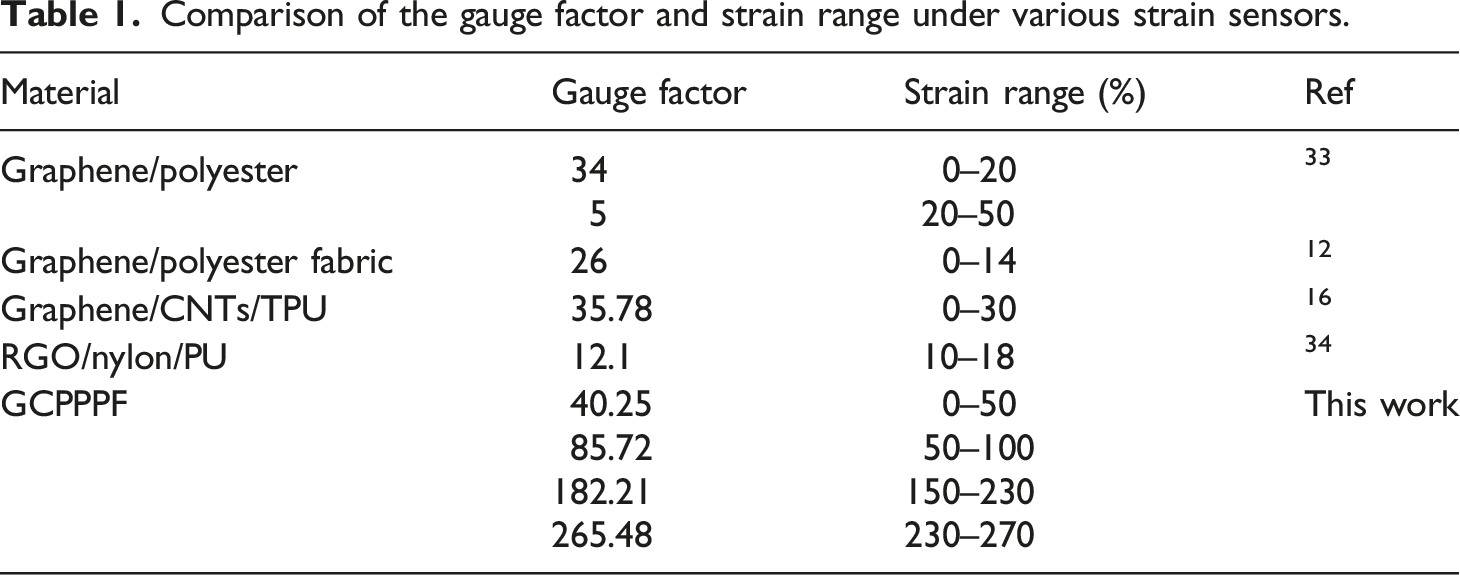
The incorporation of rGO and CNTs-COOH in PPFs with PDA endowed the electrical conductivity. Notably, the mechanical property of PPFs evidenced from the stress-strain curves revealed in Figure S11a. Interestingly, the tensile strength tremendously increased from 45.07 ± 0.5 MPa for PPFs to 62.12 ± 1.2 MPa for GCPPPFs. These results implied the mechanical performance of GCPPPFs was immensely improved. It also was possible that the addition of PDA molecules greatly improved the adhesion between rGO/CNTs-COOH and the elastomer substrate as numerous mortars. CNTs-COOH and rGO due to their outstanding tensile strength 28 diffused into the PDA largely increased as plenty of bricks the interfacial interaction, thereby further facilitating the improvement of mechanical properties of GCPPPFs. Moreover, the strain-sensing performance of GCPPPFs as strain sensors was investigated in Figure S11b. The sensor also presented great sensitivity and stretchability of 40.25 and 0–50%, 85.72 and 50–100%, 182.21 and 150–230%, and 265.48 and 230–270% respectively. Notably, the GCPPPF remarkably exhibited the superior sensitivity in composition with that of reported strain sensors,11,12 which was ascribed to the facile layered generating structure and cooperative effect of CNTs-COOH and rGO on the strain sensor surface. As a strain sensor, the resistance of GCPPPFs generally increased after performing some repetitive stretching-releasing tests. Figure S11c depicts excellent current-voltage (I−V) curves of the sensor under different strain ranges. The sensor revealed wonderful linear I-V performance at different strains implying the outstanding construction of conductive pathways on the PPPFs surface. Furthermore, the bending tests were confirmed (Figure S11d). The resistance of GCPPPFs did not illustrate an obvious change after bending tests, implying that the sensor possessed excellent sensing property. In addition, the sensor wired to a LED lamp at a 1.5 V voltage exhibited some distinct variations in light intensity under various strain ranges (Figure S12a-h). Interestingly, it still showed an apparent brightness when the sensor was stretched to 200%. This indicated that the sensor presented excellent conductivity.
Strain sensing property
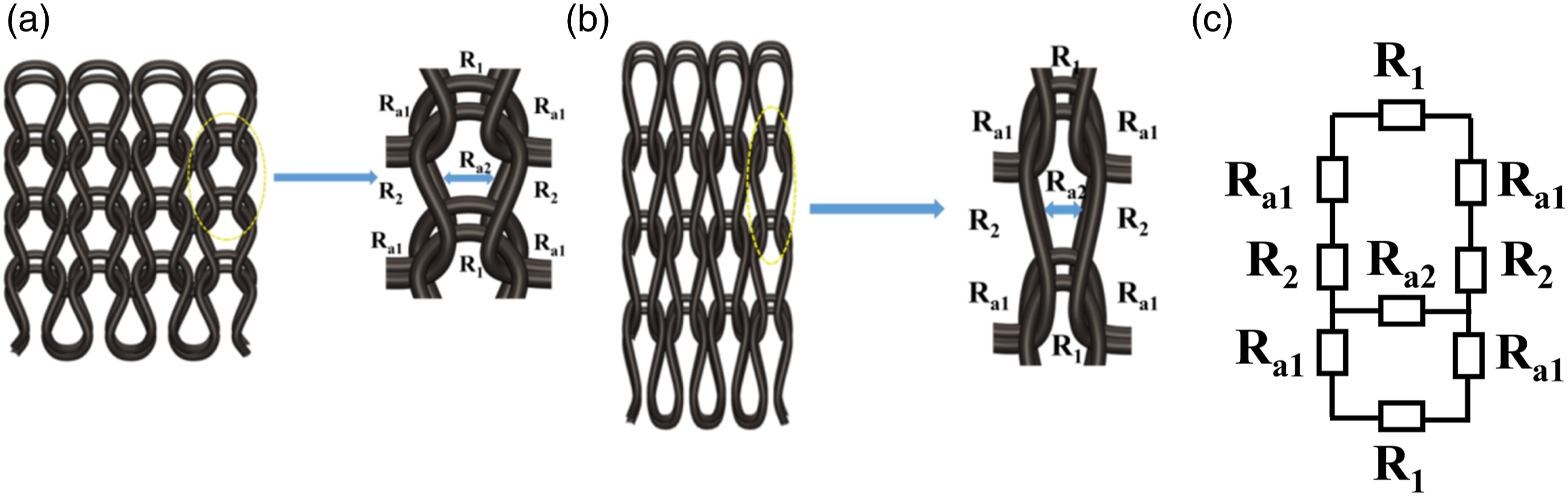
The response time of the sensor was critical to evaluate the performance of sensor. Obviously, the response time and relaxation time of the sensor were 30 and 50 ms respectively at the strain of 5%, indicating that the sensor was capable of monitoring complicated muscle movements (Figure 3(a)). Moreover, the sensing stability of the sensor corresponding to various frequencies under a strain of 5% is demonstrated in Figure 3(b). Remarkably, the resistance response signal was stable and consecutive, suggesting superb sensing property and fast response. To furthermore demonstrate the stability and reproducibility of proposed strain sensors, Figures 3(c)–(f) and Figure S13 exhibit the relative resistance change of GCPPF strain sensors in different strain ranges over 2500 stretching-releasing tests. As expected, the resistance response signal of the sensor was stable after performing some repeated stretching-releasing process. Meanwhile, the relative resistance change demonstrated almost periodic variation over 2500 cycles, suggesting that the sensor exhibited remarkable stability and reproducibility, as well as excellent mechanical durability under various strain situations. This was ascribed to the remarkable binding between conductive fillers and PPFs. Additionally, the strain mechanism of the sensor was verified (Figure 4). The initial resistance model included three conductive pathways comprised of R
1
-R
a1
-R
2
-R
a1
, R
a1
-R
2
-R
a1
-R1, and R
a1
-R
2
-R
a2
-R
a1
, respectively (Figures 4(a) and (c)). R
1
and R
2
were the resistances of the sensor in the horizontal and vertical direction, respectively. R
a1
was the contact resistance between horizontal and vertical loops. R
a2
was the contact resistance of adjacent loops in the vertical direction. And the resistance of each path was defined as R
m
, Rn, and R
p
, respectively. Thus, the resistance of each path was obtained using the formula29–32 (a) Fast response of the GCPPPF at a strain of 5%, (b) The ΔR/R0 response of the GCPPPF at three diverse frequencies at a strain of 5%, (c–f) Excellent stability of the sensor over 2500 cycles at different strains (5,50, 100, and 200%). (a) and (c) Demonstration of the resistance model of the GCPPF, (b) Resistance model under the applied strain.



R
m
is equal to R
n
. Thus, the total initial resistance (R) could be evaluated as

In the original status, the intermeshing of the horizontal and vertical loops and the adjacent vertical loops imparted the higher contact resistance R
a1
and R
a2
to the sensor in comparison with the resistances R
1
and R
2
. And the resistances R
1
and R
2
could be omitted. Therefore, the resistance of each pathway was gained using the formula


The total resistance (R) could be evaluated as

The R a1 and R a2 increased remarkably when a strain was applied (Figure 4(b)). When a strain was further applied, the permanent deformation of many conductive network on the GCPPPF surface because of severe irretrievable effects on the PET/PU molecular structure endowed the larger contact resistance R a1 and R a2 to the sensor. Thus, it caused the increase of the total resistance (R). These presented the resistance variation obtained from the GCPPPF. Thus, this resistance model illustrated a reasonable demonstration for the working strain mechanism of the sensor.
Comparison of the gauge factor and strain range under various strain sensors.
Wearable application as strain sensors
To demonstrated the practical application of the sensor, the as-prepared sensor was expected to monitor precisely wide range physiological motions (Figure 5). The sensor was affixed onto the wrist to investigate the bending-relaxing movements (Figure 6(a)). The ΔR/R0 value revealed a periodic variation through bending-unbending process. Notably, the resistance signal showed an apparent deviation under the primary cycles, but it kept stable after implementing some stretching-relaxing movements. Meanwhile, the appearance of the residual resistance was produced by the permanent deformation of the sensitive materials on the PPPF surface. Likely, the sensor was affixed onto the finger to monitor the joint movement at various bending angles (Figures 6(b)–(d)). The relative change in resistance increased obviously with the increase of the finger bending deformation, proving its stability and making a precise identification based on the different bending degrees. Meanwhile, it was affixed onto the elbow to conduct its bending motion (Figure 6(e)). The sensor provided superb resistance signal response without distinct deviation. The knee bending motion was further investigated because of the complex deformation of human movements (Figure 6(f)). The corresponding resistance signals exhibited excellent stability, suggesting that the sensor was capable of recognizing the knee joint movement. Except for the monitor of robust joint movements, it was qualified for performing tiny body motions. The sensor was mounted on the cheek to detect resistance signals (Figure 6(g)). The corresponding resistance signal remained consistent and stable, implying its good reliability. Similarly, the sensor detected tiny body movements related to the forehead via frowning-relaxing tests (Figure 6(h)). The resistance signal presented remarkable repeatability. This indicated that the sensor had great sensitivity. In addition, the moisture permeability of PET/PU fabric before and after modification was 5837 and 5634 g/(m2·24 h) respectively. Likely, the air permeability of PET/PU fabric before and after modification was 517 and 505 (mm·s−1). This illustrated that the sensor had great comfort. Therefore, these results demonstrated that the fabricated sensor reveals a potential candidate for the monitor of real-time human movements as flexible electronic devices. Schematic illustration of the as-prepared sensor acts as the body joint detector. Application of GCPPPF strain sensor to detecting (a) the wrist bending, (b–d) the finger bending, (e) the elbow bending, (f) the keen bending, (g) cheek and (h) forehead.

Conclusion
A wearable strain sensor was developed via a self-assembly intercalation technique. Due to the facile layered generating structure of the conductive fabric and the synergy effect of conductive fillers, the sensor presented a superb strain range of up to 290%, excellent sensitivity, long-term electrothermal stability, along with remarkable durability as the wearable sensor. As expected, the as-prepared sensor with superior layered generating structure was used to detect precisely wide range physiological motions. Importantly, the sensor presented remarkable heating performance. Therefore, the fabricated sensor provided a superb perspective for further promising prospect in flexible electronic devices.
Supplemental Material
Supplemental Material - Large-scale assembly of highly stretchable and conductive polydopamine-generated poly (ethylene terephthalate)/ polyurethane fabric through the self-assembly intercalation strategy for superior sensing
Supplemental Material for Large-scale assembly of highly stretchable and conductive polydopamine-generated poly (ethylene terephthalate)/ polyurethane fabric through the self-assembly intercalation strategy for superior sensing by Shuqiang Zhao, Peixiao Zheng, Honglian Cong and Ailan Wan in Journal of Industrial Textiles
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Science Foundation of China (11972172), the Fundamental Research Funds for the Central Universities (JUSRP22026).
Supplemental Material
Supplemental material for this article is available online.
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.