
Abstract
Braiding carriers, which are the important parts of a braiding machine, have the functions such as carrying braiding materials, controlling tension of carbon fiber, and driving carbon fiber movement. During the braiding process, two groups of carbon fibers braided in clockwise and counter clockwise direction contact each other and form relative motion, which causes friction and fuzzing. In order to improve this situation, the structural parameters of the carriers need to be optimized. In this paper, the kinematics and dynamics models were established based on the structure of braiding carriers. The micro-element method was used to analyze the relationship between the fiber length released from the yarn barrel, the rotation angle of the lever, and the tension of the carbon fiber. To limit the fluctuant range of carbon fiber tension, and to alleviate the fluffing phenomenon caused by the two groups of carbon fiber in contact with each other, antlion algorithm was used to optimize the structural parameters of braiding carriers. The simulation results showed that the tension of the carbon fiber can meet the processing requirements by adjusting the starting angle of each stage of carrier, the length of lever, the elastic coefficient of springs, and pre-compression of springs. It can be known that the structural parameters of braiding carriers optimized by antlion algorithm could meet the requirement of carbon fiber tension.
Introduction
Braiding is a traditional processing method. To obtain a thicker, wider, and stronger product or to cover the outline (over-braiding), three or more diagonal strings are interlaced to the product axis (parallel to the longest dimension of the resulting product) [1]. The products obtained by braiding are more resistant to impact, delamination, and creep than products obtained by other processing methods. Moreover, braiding has good copying effect, which means that the necessary preform can be obtained by adjusting the shape of the mandrel.
With the development of composite materials, the combination of braiding process and carbon fiber can obtain carbon fiber preforms with corrosion resistance, high temperature resistance, high strength, high modulus, and light weight. Then the preforms can be enhanced by resin transfer molding (RTM) [1,2], vacuum-assisted resin transfer molding (VARTM) [3,4], or resin film infusion (RFI) [5] techniques to obtain the final machined parts. Through the prior art, carbon fiber can be used for braiding to obtain T-beams, I-beams, box beams, cross beams, F-beams, cylinders, conical shells, circular/rectangular/variable cross-section, and other shapes of prefabricated parts. The reinforced braiding preforms can be applied in various industrial fields such as plates, beams, shafts, aircraft propeller blades [6], automobile bumpers [7,8], artificial bones [9,10], baseball bats [11,12], bicycles [13], and other structural parts. Military aircraft manufactured by carbon fiber braiding preforms can meet the requirements of appearance, light weight, and preventing radar detection [14]; and it is seen that missile warheads manufactured by carbon fiber braiding preforms have better external shape and chemical stability. Due to the broad application prospects of carbon fiber preforms, many scholars have conducted related research on the braiding process.
Braiding carriers have many functions such as reserving carbon fiber, releasing carbon fiber, adjusting the length, and controlling tension. During the process of braiding, braiding carriers compensate for the length of carbon fiber to ensure the stability of the carbon fiber tension and meet the processing requirements. Carbon fiber tension plays an important role in the quality of the braiding products. If the carbon fiber tension is too large, it will cause carbon fiber damage or even fracture. If the carbon fiber fluctuates too much, the structure of the braiding products will be uneven and the mechanical properties will become poor. Based on the importance of carriers, Ma et al. [15] and Kyosev [16,17] have conducted studies on certain types of carriers.
As the carriers move along the chassis track during the braiding process, the length of the catenary (from the exit point of carriers to the braiding point) continuously changes, which makes the tension of carbon fiber fluctuate. In order to obtain a braiding product, which has more uniform structure and better mechanical properties, the structural parameters of carriers with double springs-lever are optimized. The optimized carriers can control the tension of carbon fiber within a specified range, and the tension can be adjusted according to different braiding materials. The results can provide a reasonable reference for the optimal design of carriers in the future.
Carrier modeling
Braiding process and carrier structure
Braiding process
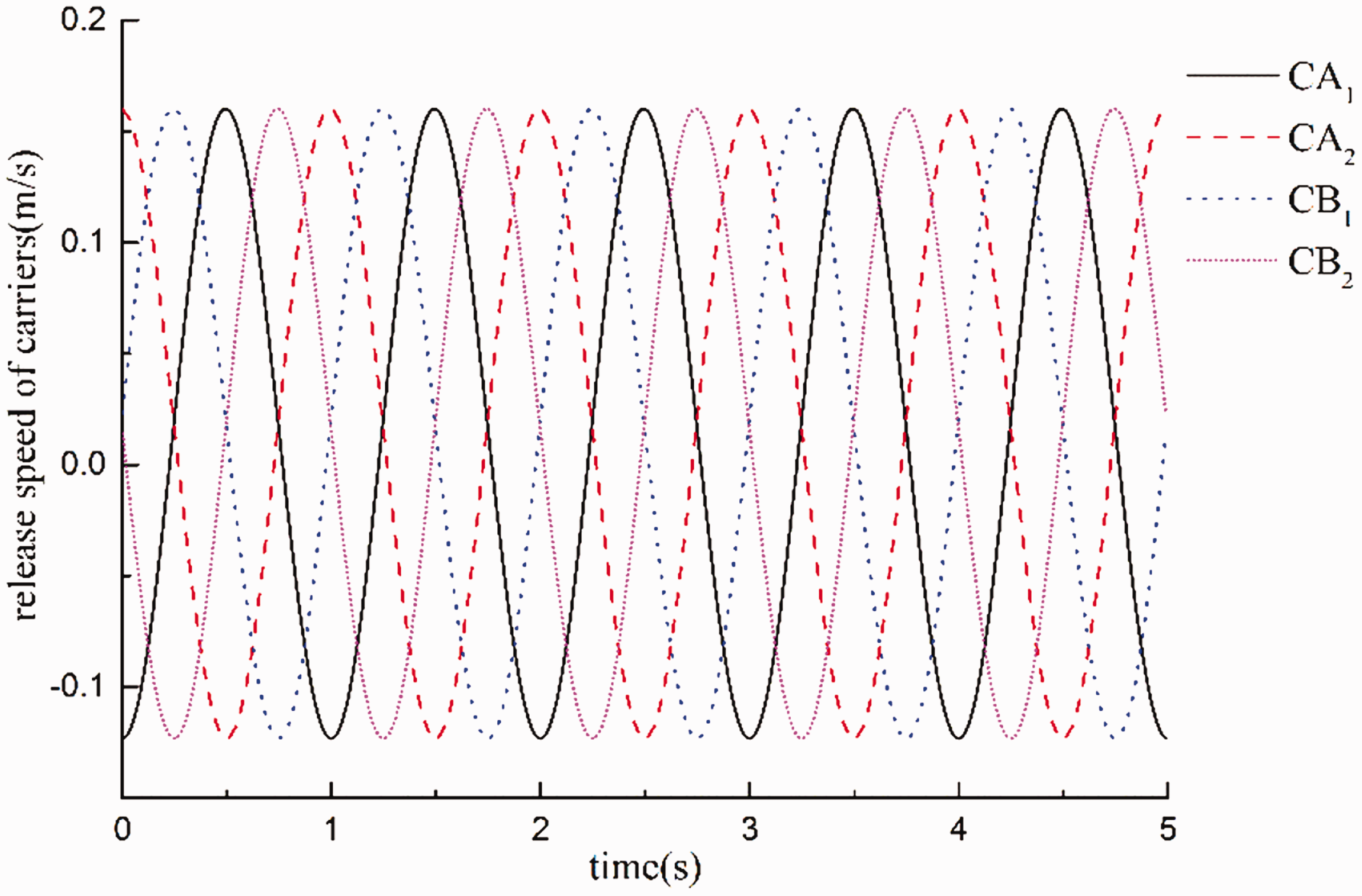
The chassis of the horizontal inner braiding machine has 72 horn gears. A horn gear has four slots. The carriers are installed as 1F1E method (a gap is set between two adjacent carriers, which move in the same direction). About 144 carriers are driven during braiding. According to the movement direction of carriers, the carriers can be divided into group Braiding process. Release speed of carriers.
Assuming that the braiding task is a cylindrical braided tube, if the radius of the braiding mandrel and the width of the carbon fiber can be known, then equation (1) can be used to calculate the braiding angle at 100% coverage. For the ease of reading and understanding, the notation is attached at the end of the article.

The radius of the braiding chassis can be got when the radius of the horn gears is known

The distance (H) between the braiding point and the center of the chassis can be obtained, based on the radius of braiding chassis and the braiding angle.

In order to ensure that the carbon fiber is evenly wound along the braiding angle, there is a ratio between the moving speed of the mandrel and the angular velocity of the horn gears. The speed of the braiding mandrel is obtained by the following equation

Using equations (1) to (4), the length of the catenary between the braiding point and exit point of the carrier can be evaluated as

The derivative of the catenary length of

The speed of carbon fiber wound on the surface of mandrel can be calculated by the movement speed of the braiding mandrel based on equation (4)

Combining equations (6) and (7), the carbon fiber release speed of carriers is known during the braiding process

Carrier structure
As shown in Figure 3, the carbon fiber is unwound from the spool, then through the tube, pulley 1, pulley 2, and the exit point successively. When the speed at the exit point is positive (carrier needs release carbon fiber), the carbon fiber pulls up the right end of the lever and the springs are compressed. If the rotation angle of the lever is between −30 ° and Carrier structure.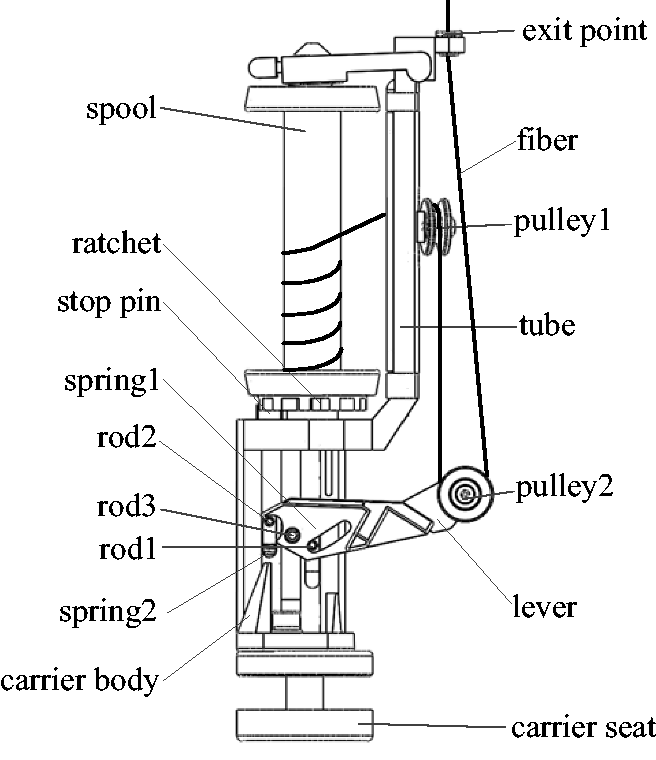
In order to analyze the tension change of the carbon fiber, according to the carrier structure, the path diagram of carbon fiber is shown in Figure 4. Point A is the unwinding point of the carbon fiber; Path diagram of carbon fiber: (a) diagram of carrier; (b) plane projection of the carbon fiber path; (c) top view of the carbon fiber path.
Kinematic model
A kinematic model of carrier is established based on Figure 4. In order to facilitate the subsequent calculation, the carbon fiber is divided into



Modeling at regulating stage
The length of


The reduction of

Modeling at releasing stage
The horizontal distance of


Carbon fiber is wrapped around the tube to form an angle.

Point N is the foot of point A in the horizontal plane of

Equations (15) to (17) are substituted into equation (19) to obtain the length of

According to calculations, the height of point A has an effect on the calculation result of

To sum up, the length of

At this stage, the spool starts to release the carbon fiber due to the tension of the carbon fiber. The unwinding length of carbon fiber can be calculated according to equation (11). The analysis shows that the length changes of

Dynamic model
The tension of carbon fiber is analyzed according to the working principle of the carrier. For ease of calculation, the dynamic model is built according to the working stage of the carrier.
Tension at the regulating stage
The spool is restrained by the stop pin and remains stationary at the regulating stage. The demand is met by adjusting the length of
According to the spatial positions of spring 1 and spring 2, the value of spring force 1 and spring force 2 can be calculated


According to equations (23) and (24), when θ is greater than
According to the force analysis of the lever, the torque of the lever is 0 at equilibrium stage. Since pulley 2 is a movable pulley, the tension of the carbon fiber on the left of pulley 2 should be equal to the tension on the right side of pulley 2. The torque equation of the lever is established to obtain the tension of carbon fiber.

Tension at the releasing stage
When the rotation angle of the lever is greater than


The acceleration obtained from equation (26) can be used to determine the rotational speed and angle of the spool


According to equation (29), the rotation angle of the spool is known at any time of the releasing stage, so the length of carbon fiber released from the spool in unit time can be obtained

Antlion optimization algorithm
The antlion algorithm [18,19] was a bionic algorithm proposed by Australian scholar Seyedali Mirjalili in 2015. The antlion algorithm is mainly to simulate the foraging behavior of antlions. The antlion algorithm requires initialization prior to the calculation so that each ant and each antlion get a position within a limited range. The initial positions of antlions and ants are substituted into the fitness function to obtain the fitness value, and the fittest antlion is set as the elite. In order to obtain a global optimal solution, each ant walks randomly to form a new generation of ants within a limited range. Then the positions of the new generation of ants are substituted into the fitness function to obtain the fitness value of the new generation of ants. If the fitness value of the new generation of ants is better than that of the corresponding antlions, the position of the antlion is replaced by the position of the ant. If the fitness value of the new generation antlion is better than that of the elite, the position of the elite is replaced by the position of the antlion. Ants and antlions will continue to try new positions until they meet the optimization requirement. The position of ultimate elite represents the optimization solution. Because the antlion algorithm has better searching efficiency and convergence accuracy, Hadidian-Moghaddam et al. [20], Ali et al. [21], and Mirjalili et al. [19] used the antlion algorithm for optimization.
To get the best solution, the objective function need be set first. Assume that substituting the best solution into the objective function can get the global minimum. For satisfying this condition, there are i ants and j antlions within the specified range. The positions of the ants and antlions correspond to a solution. Substituting the ants' and ant–lions' position vector into the objective function, we can obtain the corresponding fitness value. The steps involved in ALO algorithm are described as follows:
Step 1: Set the initial position of the ants and antlions and select the initial elite.
The initial positions of i ants and j antlions are randomly selected within the specified range. The fitness values of ants and antlions are calculated respectively. And the optimal antlion is set as elite.
Step 2: Limit the movement range of ants.
Each antlion builds a trap based on its own fitness. When an ant falls into a trap, the antlion kicks away the sand in the center of the trap to avoid the ant running away. In order to imitate this process, equations (31) to (33) are used to simulate the ever-reducing radius of the trap, and then the optimization range of ants is obtained in g-generation optimization
Step 3: Update positions of ants.





Assuming that the ants walk randomly within a limited range, the walk of the ants is set using a random function (36) to obtain equation (37). To avoid ants from exceeding the scope of optimization, the equation (38) is used to standardize the random walk of ants
Step 4: Get ants' fitness.



The positions of the new generation of ants are substituted into the fitness function to obtain the fitness value of each new ant.
Step 5: Update antlion.
If the fitness value of ant is higher than that of antlion, the position of ant is assigned to antlion
Step 6: Update the elite.

In the optimization process, the elite is set as the optimal solution. When an antlion's fitness value is higher than the elite's fitness value, the antlion is set as new elite and its position will be preserved. The fittest antlion can affect the movements of all ants. The following equation can be obtained based on an assumption that each ant randomly walks around an antlion selected by roulette and elite

Step 7: Repeat step 2 until the termination condition is satisfied.
Figure 5 is drawn for easy understanding, which is the flowchart of proposed ALO algorithm.
Flowchart of the proposed ALO algorithm.
Optimizing structural parameters of carriers using antlion optimization algorithm
Optimization objectives
Braiding carriers can adjust the tension of the carbon fiber by the rotation angle of the lever and the length of the carbon fiber unwinding from the spool. However, the fluctuation of the carbon fiber tension causes the defects in the shape and texture of braiding products. The carbon fiber braided clockwise and the carbon fiber braided counterclockwise touch and move relatively to each other, which causes friction and fluff. The degree of friction is affected by the tension of the carbon fiber. The greater the tension is, the more obvious the fluffing is. In order to obtain better quality and more compact braiding products, the antlion algorithm can be used to optimize the structural parameters of the braiding carriers.
The optimization objectives are as follows:
Reduce the phenomenon where the two groups of carbon fiber braided in different directions are at the large tension state; Make the tension of the carbon fiber fluctuate around the required values; Avoid altofrequent and sharp fluctuations of the carbon fiber tension.
Select optimization parameters
Based on the kinematics model and dynamics model, the tension of the carbon fiber is mainly affected by spring 1 and spring 2. The operating time of spring 1 and spring 2 is related to the working stage of the carriers, which is determined by
Optimization ranges of the parameters
Optimization range of the parameters.

Results and discussions
Pre-optimization simulation
As shown in Table 2, the initial structural parameters of the braiding carrier were substituted into the kinematics model and dynamic model. The release speed of the carrier is shown in Figure 2. Figure 6 is drawn according to the simulation results.
Angle of the lever and carbon fiber tension before optimization: (a) angle of the lever before optimization; (b) carbon fiber tension before optimization. Structural parameters of braiding carrier before optimization.

As shown in Figure 6, the carriers entered a stable working stage after 4 s in the simulation, so the simulation results of the carbon fiber tension were analyzed in detail from 4 s to 5 s. As shown in Figure 6(a), θ was greater than 0 from 4 s to 5 s. The carriers used two springs to regulate the tension of the carbon fiber. As shown in Figure 6(b), under the simultaneous action of two springs, the tension of the carbon fiber carried by
In addition to reducing carbon fiber fluff by optimizing structural parameters of carriers, it was also possible to adjust the fluctuation range of the carbon fiber tension for different braiding tasks and materials. Before the braiding work, the calculation was conducted to obtain the carbon fiber fluctuant interval required for processing. And the structural parameters of braiding carriers were calculated to satisfy the requirement, thereby improving the qualification ratio of braiding products.
Optimization results
The simulation by MATLAB was carried out for the previously proposed optimization objectives. According to different optimization requirements, the structural parameters of the braiding carriers were optimized by the antlion algorithm. The time from 4 s to 5 s is divided into 100 unit times, so
Optimization objective (a): Reducing the overlap time

Optimized structural parameters to reduce the overlap time.

If carbon fiber braided in clockwise and carbon fiber braided in counterclockwise were at the large tension stage, then
Optimization objective (b): Regulating the tension of the carbon fiber

Optimized structural parameters to regulate the carbon fiber tension.

Optimization objective (c): Comprehensive optimization

Optimized structural parameters to meet optimizations.

If the stage of carbon fiber tension changed, then
Result analysis
To calculate the carbon fiber tension values, the optimized structural parameters obtained from the optimization objectives (a), (b), and (c) were substituted into the model of carrier. The simulation results are shown in Figure 7.
Comparison of simulation results: (a) pre-optimization simulation; (b) reduce the overlap time; (c) regulating the tension of the carbon fiber; (d) comprehensive optimization.
Analysis of optimization results based on objective (a)
The optimization results based on the optimization objective (a) are shown in Figure 7(b). Figure 7(b) and (a) are compared and analyzed. Before optimization,
After optimization,
Analysis optimization results based on objective (b)
The optimization results based on the optimization objective (b) are shown in Figure 7(c). Figure 7(c) and (a) are compared and analyzed. After optimization, the pre-compression and elastic coefficient of the two springs were adjusted. The spring force was related to the compression of the spring. If the carbon fiber was only at the large tension stage, the fluctuation of the carbon fiber tension was large as shown in Figure 7(a). Therefore, by changing the value of
Analysis optimization results based on objective (c)
The carbon fiber tension generated multiple large fluctuations based on the optimization objective (a). A new optimization objective (reducing the number of large fluctuations of the carbon fiber tension) was introduced.
According to different braiding tasks and materials,
Conclusions
The antlion algorithm was used to optimize the structural parameters of the braiding carrier. The kinematics model and dynamics model based on the structure of the double springs-lever type carrier obtained the relationship between the relevant structural parameters and the carbon fiber tension. Then the optimization results were compared and analyzed through MATLAB software. In conclusion, it could be known that:
By changing The pre-compression and the elastic coefficient of springs combined with the starting angle of the carrier state could maintain the carbon fiber tension within a small range around the required value during the stable working. By introducing the objective weights, the degree of the different optimization objectives could be adjusted. The optimized structural parameters could meet the requirement of the braiding task and material.
In short, the structural parameters of the braiding carriers optimized by antlion algorithm could improve the quality and mechanical properties of the braiding products.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Footnotes
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China [Grant no. 51475091], the rolling support plan for the excellent innovation team by Ministry of Education of the People's Republic of China [IRT_16R12], and the Donghua University Graduate Student Degree Thesis Innovation Fund Project [Grant no. CUSF-DH-D-2017064].