
Abstract
This study investigates a non-ideal magnetic levitation system (NIMLS) for energy harvesting, with particular emphasis on the influence of the oscillating core mass. The system is excited by an electrodynamic shaker, leading to strongly nonlinear oscillatory behavior governed by a coupled equation resembling the Duffing oscillator. Perturbation techniques are employed to analyze the system dynamics under the combined action of a negative velocity and negative acceleration controller (NVC+NAC), focusing on primary resonance and 1:1 internal resonance condition. Analytical solutions are derived to describe the system response, while MATLAB-based numerical simulations are used to validate the theoretical results. The stability of the system under primary resonance is examined using the Routh–Hurwitz criterion. Furthermore, the effects of structural constraints and system parameters on the dynamic performance of the primary system equipped with the NVC+NAC controller are investigated. A comparative analysis between analytical and numerical solutions confirms the accuracy of the perturbation-based approximations and demonstrates the effectiveness of the proposed controller in suppressing vibration amplitudes.
Keywords
1. Introduction
Recent advances in vibration-based energy harvesting have focused on converting ambient mechanical vibrations into electrical energy through innovative device designs. Khatun et al. 1 investigated ambient vibration sources and optimized resonant frequencies using proof mass systems, providing guidelines for efficient energy conversion at low excitation levels. Hussain et al. 2 performed numerical and experimental analyses of nonlinear broadband monostable and bistable energy harvesters, demonstrating significant enhancement in harvested energy through system nonlinearity. Xu et al. 3 explored magnetic levitating bistable electromagnetic harvesters, proposing strategies to improve dynamic performance under varying excitation conditions. Francis et al. 4 examined the effect of the levitated mass’s weight on system oscillations and energy efficiency, highlighting critical design parameters for stable operation. Ribeiro et al. 5 analyzed nonlinear dynamics under frequency-varying excitations and proposed control strategies to maximize energy extraction. Hajradinović and Zuković 6 studied vibro-impact systems with non-ideal excitation, providing insight into transient and steady-state motion. Rocha et al. 7 demonstrated practical energy harvesting from a magnetic levitation system excited by an electrodynamical shaker, validating theoretical models through experimental implementation.
In the domain of vibration control, Amer et al. 8 applied PD control to active magnetic bearing systems, showing improved stability under high-speed rotational conditions. Alluhydan et al. 9 investigated time-delayed damping in a Duffing oscillator, demonstrating effective vibration suppression through tailored control schemes. Jamshidi and Collette 10 optimized negative derivative feedback controllers for collocated systems, achieving enhanced system stability and reduced resonant amplitudes. References 8 and 11 presented hybrid Rayleigh–Van der Pol–Duffing oscillator models with PD controllers, demonstrating significant vibration reduction in nonlinear dynamic systems. Further, Amer et al. 12 employed negative cubic velocity feedback to reduce vibrations in vertical conveyor systems, confirming controller efficacy through both analytical and numerical studies. Hamed et al. 13 applied PD controllers to wind turbine towers, optimizing energy transfer and structural stability. Bauomy and El-Sayed 14 demonstrated the role of nonlinear PD controllers in laminated shells, highlighting their applicability in smart structural systems. Hamed et al. 15 extended PD control to vertically excited transport systems, verifying performance improvements under variable loading conditions.
Positive position feedback (PPF) and nonlinear integral PPF (NIPPF) controllers have also been extensively explored. Alluhydan et al. 16 implemented PPF controllers in hybrid electric vehicle generators, demonstrating enhanced vibration suppression and improved energy efficiency. The impact of NIPPF controllers on forced and self-excited nonlinear beams was investigated by, 17 showing a reduction of flutter-induced vibrations. Omidi and Nima 18 applied multimodal modified PPF controllers to collocated structures, achieving precise mitigation of resonant oscillations. Abdelhafez and Nassar 19 utilized PPF control to suppress high-amplitude vibrations in nonlinear beams, while 20 verified the effectiveness of PPF in principal resonance excitation scenarios. Zhu et al. 21 developed adaptive feedforward PPF strategies for piezoelectric cantilever beams, demonstrating robust vibration control under variable operating conditions.
Nonlinear dynamic analysis has been central in understanding complex vibration phenomena. Fyrillas and Szeri 22 analyzed ultra- and subharmonic resonances, providing foundational insights into nonlinear resonance behavior. Fischer and Eberhard 23 applied predictive control to cutting processes, illustrating real-time mitigation of vibratory disturbances. Bauomy and El-Sayed 24 examined the effect of specialized vibration controllers on cracked beams, contributing to structural reliability studies.
Analytical methods such as the Method of Multiple Scales and perturbation techniques have been widely employed. Kevorkian and Cole 25 introduced the multiple scales method for solving ordinary differential equations in nonlinear systems, while 26 provided comprehensive perturbation approaches for dynamic analysis. Dukkipati 27 utilized MATLAB-based solutions to facilitate vibration problem-solving in engineering applications. Bek et al. 28 conducted an asymptotic analysis on a 3DOF dynamical system near resonance, offering a precise prediction of system behavior. References 29 and 30 systematically analyzed stability and nonlinear responses in multi-degree-of-freedom oscillators, including double pendulums and damped spring pendula, highlighting resonance and bifurcation phenomena. Amer et al. 31 and Abohamer et al. 32 extended these studies to coupled oscillators with piezoelectric harvesters and Duffing systems under sinusoidal excitation, providing detailed insights into chaotic and stability behaviors.
The current aims in this work are to apply the combined NVC and NAC controller to suppress vibrations in the primary system under external excitations. Time responses were evaluated using the fourth-order Runge–Kutta method, and approximate solutions were obtained via MTST. Stability under primary and 1:1 internal resonances was analyzed, with MATLAB simulations confirming the controller’s effectiveness in vibration reduction.
1.1. Motivation and Novelty
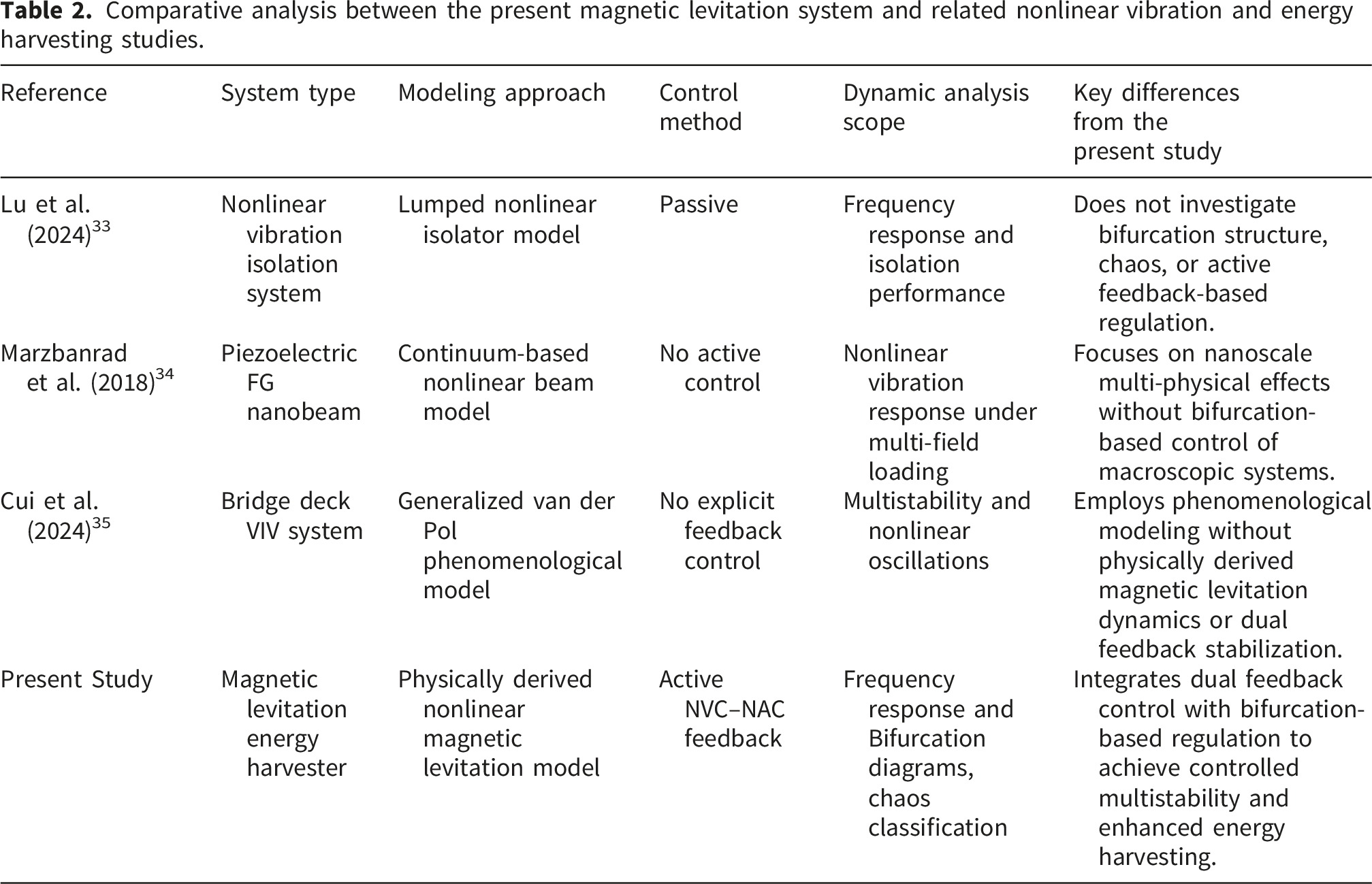
Although strong nonlinearities and multi-physical coupling have been widely investigated in nonlinear vibration research, the present work introduces several distinct contributions relative to existing studies. For instance, the self-powered low-frequency nonlinear vibration isolation system reported in Ref. 33 focuses primarily on passive vibration mitigation through nonlinear stiffness tailoring. In contrast, the proposed magnetic levitation system incorporates active negative velocity and negative acceleration feedback (NVC–NAC) to simultaneously regulate nonlinear dynamics and enhance energy harvesting performance. Similarly, the nonlinear analysis of piezoelectric functionally graded nanobeams under combined hygro-magneto-electro-thermo-mechanical loading in Ref. 34 emphasizes multi-field coupling effects at the nanoscale. The present study instead considers an electrodynamically excited magnetic levitation harvester and investigates how feedback-induced nonlinear modulation influences bifurcation structure, multistability, and harvested power. Moreover, while the generalized van der Pol–type model developed in Ref. 35 captures multistable vortex-induced vibrations in bridge deck systems, that approach is phenomenological in nature. By contrast, the current work derives a physically grounded nonlinear model of a magnetic levitation system and demonstrates how controlled multistability can be strategically exploited to improve energy harvesting efficiency. In addition, recent investigations have explored broadband dynamic responses and vibration control in magnetic and electromechanical systems. The time-delayed nonlinear magnetic levitation system in Ref. 36 achieves broadband characteristics via delay-induced nonlinearity, primarily targeting enhanced harvesting bandwidth. The HTS maglev system analyzed in Ref. 37 focuses on electro-mechanical coupling performance under electromagnetic interactions. Furthermore, the active rotary inertia driver proposed in Ref. 38 addresses flutter suppression in large-scale bridge structures through active control mechanisms. In contrast to these studies, the present work integrates NVC and NAC control within a physically derived magnetic levitation framework to realize controlled multistability, broadband vibration suppression, and enhanced robustness against excitation frequency variations. Therefore, the novelty lies in combining physically derived nonlinear modeling with dual feedback control to simultaneously achieve active vibration suppression and improved energy harvesting performance. To clarify the claims of broadband vibration suppression and robustness, broadband performance is herein defined as the ability of the system to maintain effective vibration suppression and energy harvesting over a wide excitation frequency range. In the present study, this broadband behavior is quantified based on the −3 dB bandwidth criterion. Robustness refers to the capability of the proposed controlled magnetic levitation system to preserve stable dynamic performance under excitation frequency variations. These definitions are substantiated and quantitatively demonstrated in the Results section.
2. Mathematical model
2.1. System dynamics without a controller
The system exhibits Duffing-like nonlinear characteristics, which help guide the qualitative interpretation of its response. To analyze the magnetically levitated system with integrated energy harvesting, we employ a mathematical model based on a simplified two-degree-of-freedom harmonic oscillator.
7
Harmonic oscillators are characterized by their ability to exhibit sinusoidal motion under a restoring force proportional to displacement, and in this study, they provide a simplified framework to represent the system’s dynamic behavior. The mathematical derivation of the system equations is presented in the appendix.


2.2. Impact of (NVC+NAC) control on system dynamics
In Figure 1, an electro-dynamical shaker excites the levitated object, which is suspended by a magnetic field generated by electromagnets or permanent magnets to counteract gravity, thus enabling contactless suspension. The energy harvesting circuit converts the vibrational motion into electrical energy through electromagnetic induction or piezoelectric conversion. The weight of the levitated object significantly affects the magnetic field strength required for levitation, as well as the system’s stability and energy harvesting efficiency. The upper part of the figure is adapted from,
7
the middle part presents the governing equations of the system, and the lower part illustrates the integration of the nonlinear vibration controller (NVC) and the nonlinear absorber component (NAC) connected to the main structure. The schematic flowchart of the system incorporates (NVC+NAC) controllers.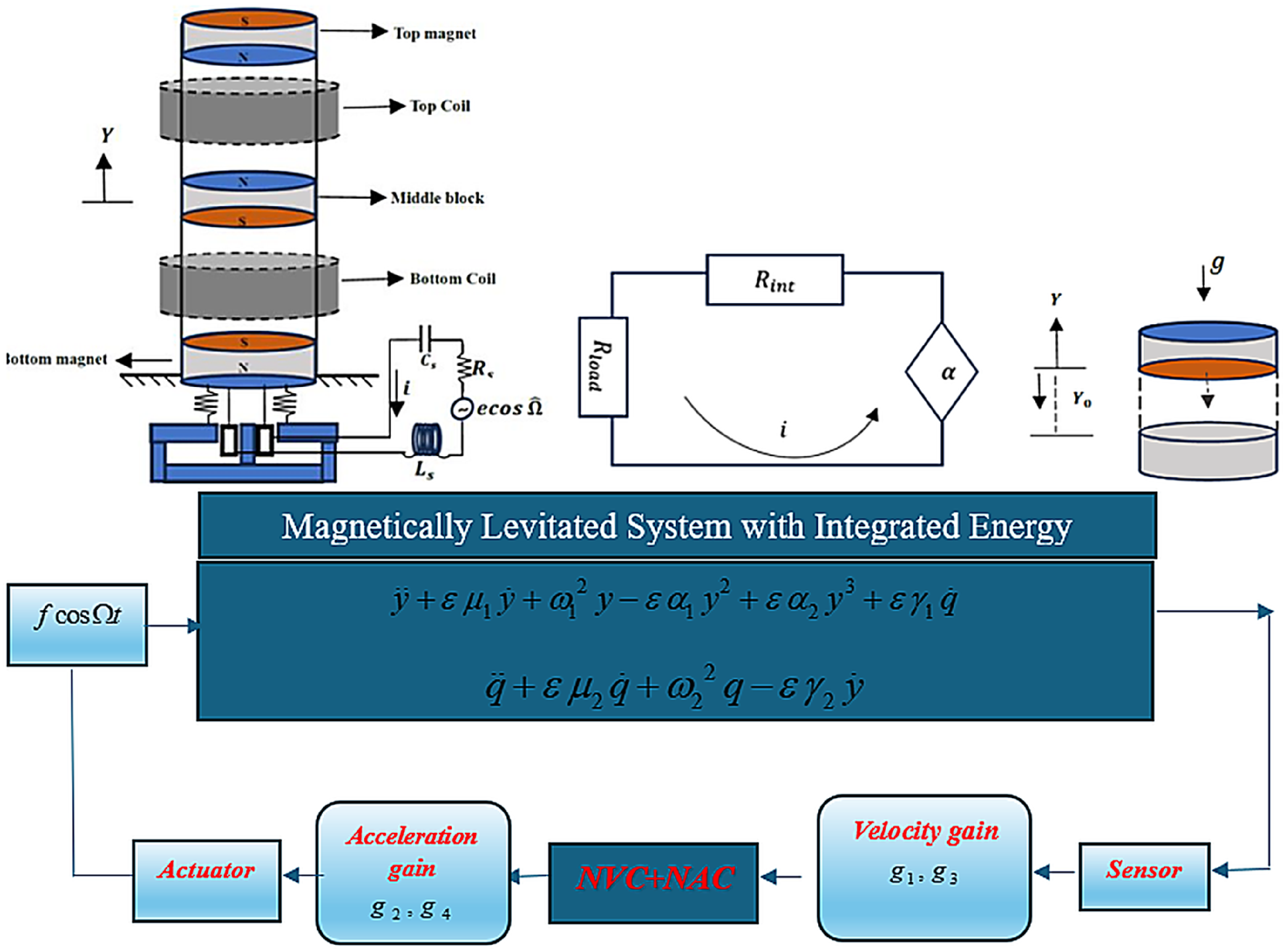


It should be noted that the coefficients
3. Mathematical treatment
3.1. Approximate analytical solution
In this section, (MTSM) is employed to derive a first-order approximate solution for the nonlinear dynamical system controlled by the (NVC+NAC) controller.25–27 Using the multiple scales method, where the fast scale is




Matching the coefficients of corresponding powers of






From eq. (9) & (10) Solving the homogeneous differential equations, we get:


Differentiate equations (13) and (14) with respect to t and substitute the results into equations (11) and (12):


By applying this condition in Equations (15) and (16), we can delete the new secular terms as follows.
Where CC. represents the collection of complex conjugated parts. After removing secular words, take the following forms:


From the initial estimate, we identified the following resonance cases: i. PR: ii. IR
3.2. Episodic resolutions
In this section, the selected tone situation:

Incorporating equation (19) along with the secular and small division terms from equations (17) and (18) to establish the solvability criteria as follows:


To examine the solution of equations (20) and (21), we express A and B in polar form as follows:










3.3. Frequency response equation
Equations (28) to (31) may possess a fixed point corresponding to a steady-state solution, which can be determined by setting the time derivatives equal to zero.:




By squaring Equations (34) and (35) and summing both sides, we obtain the following equation:


Equations describing the system’s frequency response are used to study the behavior of steady-state solutions under typical operating conditions (
3.4. Constancy examination through linearizing the overhead structure
To assess the stability of the equilibrium solution, the eigenvalues of the Jacobian matrix corresponding to the given equations were analyzed. If all eigenvalues possess negative real parts, the equilibrium is asymptotically stable. Conversely, if at least one eigenvalue has a positive real part, the equilibrium becomes unstable. Stability analysis focuses on the behavior of small perturbations around steady-state solutions





Calculations (39) through (42) can be expressed in the following matrix form:


As defined in the Appendix, the elements


The appendix contains pigeon-holed quantities from equation (46). Aimed to abovementioned classification’s key to be firm, the Routh-Hurwitz criterion
39
must be met. This means:

4. Results and discussions
4.1. Time history presentation without and with (NVC+NAC) controller
This study looks at the stability of an enforced self-excited nonlinear ray system with the (NIMLS). The system’s behavior is numerically investigated using the fourth-order Runge-Kutta method (MATLAB’s ode45 occupation). The outcomes remain obtainable realistically, graphing steady-state profusions against detuning parameters

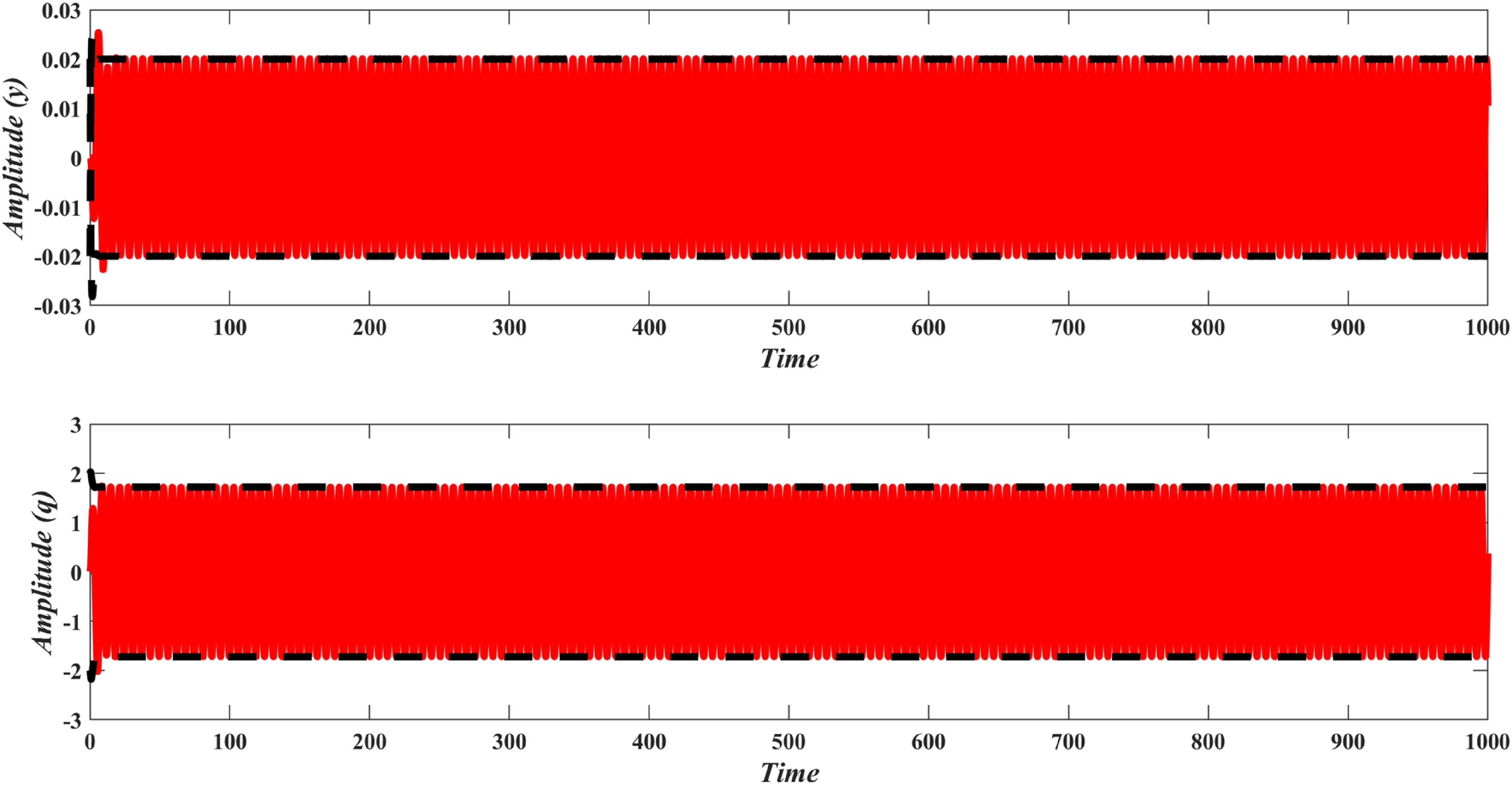
Figure 2 Steady-state amplitudes and the corresponding Poincaré section diagrams of the system before and after applying the combined NVC and NAC controllers at the most critical excitation frequencies (approximately 1.7 and 42.3, respectively). The addition of NVC and NAC controllers considerably reduces system amplitudes to 0.04 and 1.2, respectively. This displays the efficacy of the NVC+NAC controllers. Ea. = 43, Ea. = 36, and vibrations are decreased by roughly 97.8% associated with their rate deprived of the regulator. The numerical integration for the middle group of images was performed over a dimensionless time interval of 0–1000 with a step size of 5, clearly showing the gradual attenuation of oscillations as the velocity approaches zero. The major system’s amplitude before (blue) and after (red) the addition of the NVC+NAC controller.
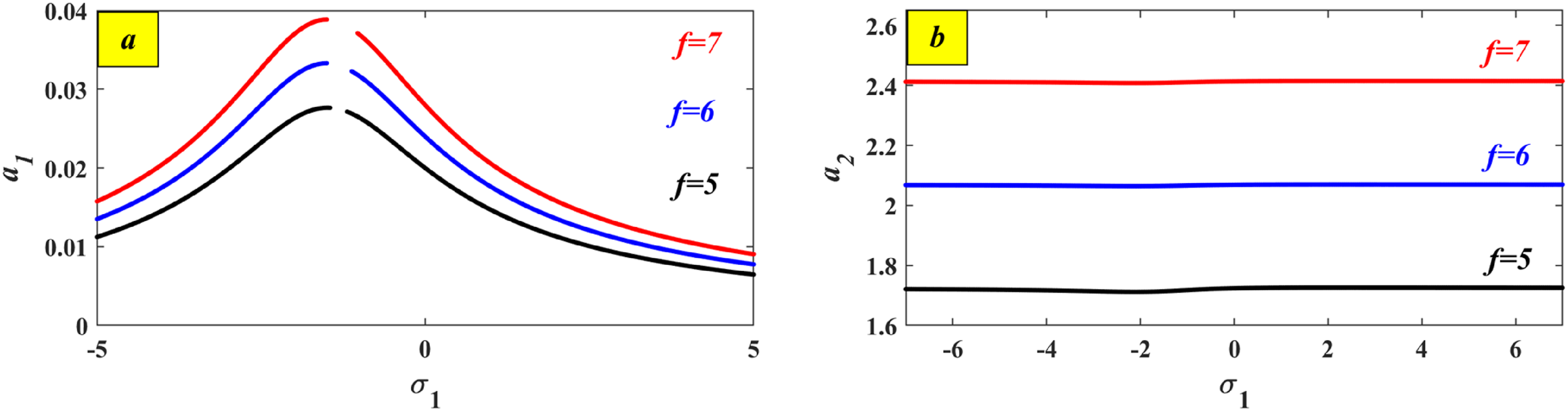
4.2. Frequency response curves (FRC)
The response amplitude of the system is governed by both the detuning parameter Resonance curves for the main system with (NVC+NAC) controller (parameter as in equation (48)). Frequency retort curve illustrating system amplitude variation across changed values of external force f on the focal structure with (NVC+NAC) organizer 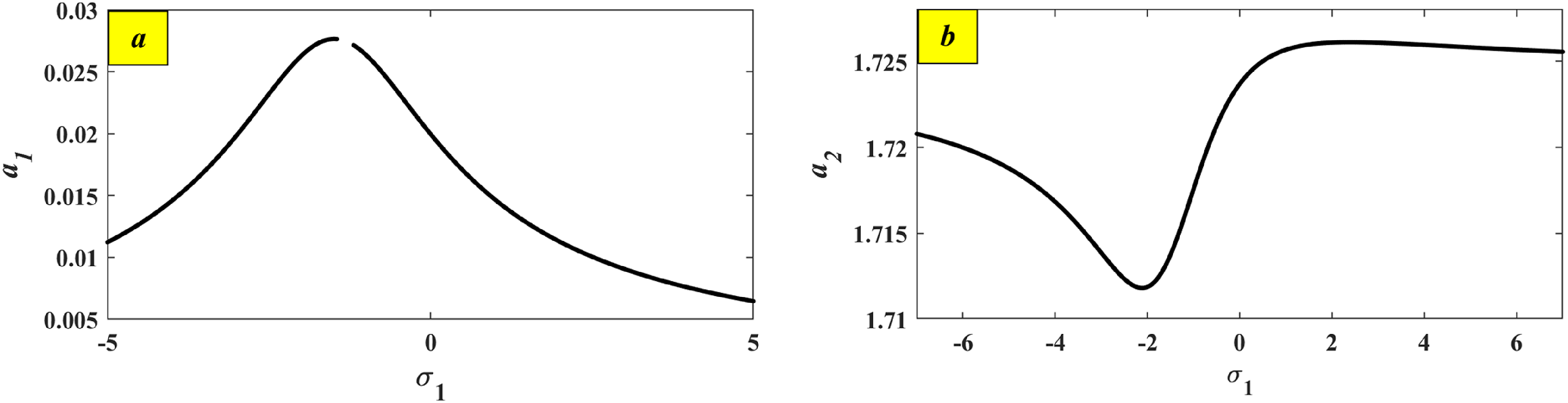
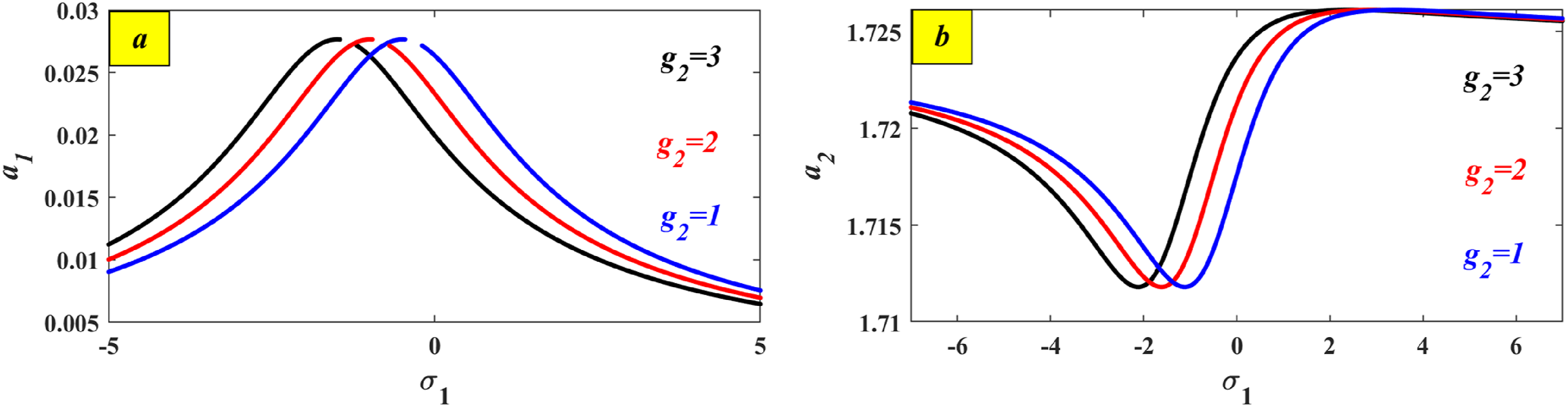
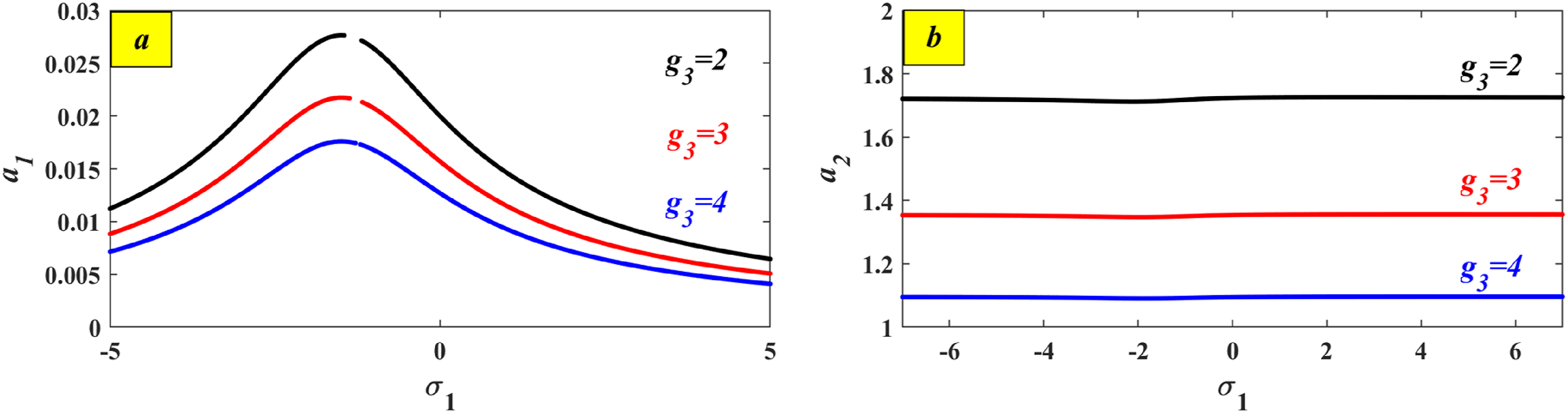
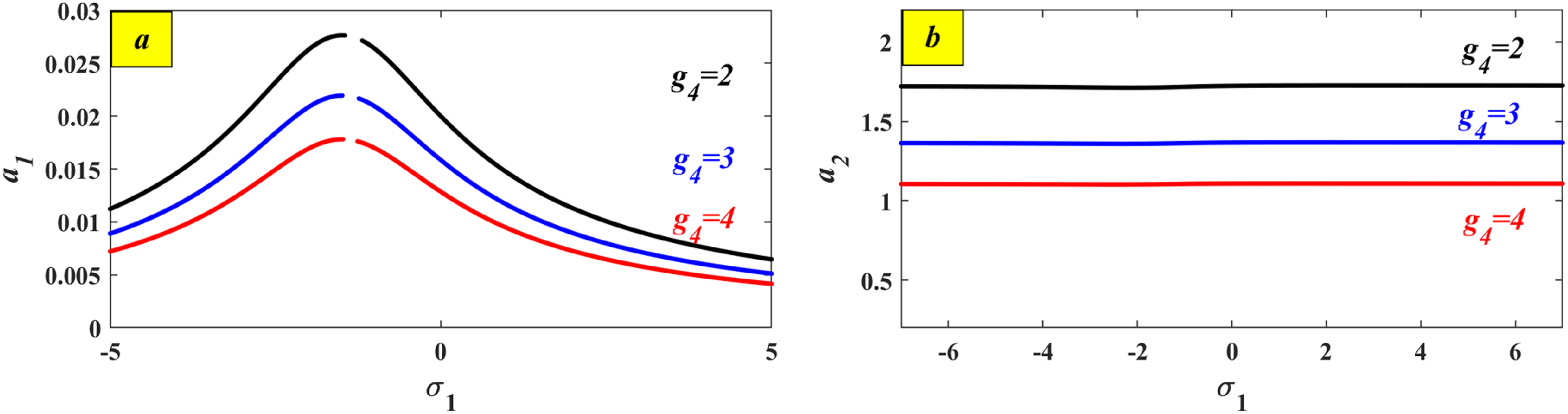
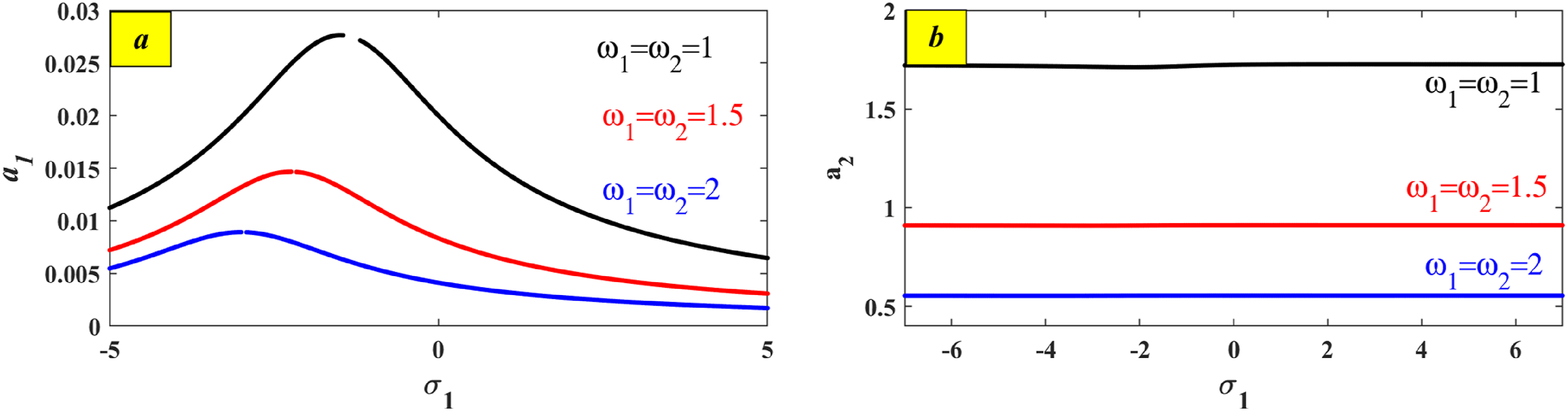
Figures 5–8 demonstrate the influence of the velocity feedback gain Frequency retort curve illustrating system amplitude variation across changed values of rheostat indication expansion Frequency retort curve illustrating system amplitude variation across changed values of rheostat signal gain Incidence retort arc illustrating system plenty variation across changed values of relation The regularity comeback arch depicts the variation in system amplitude corresponding to different values of the rheostat gain. 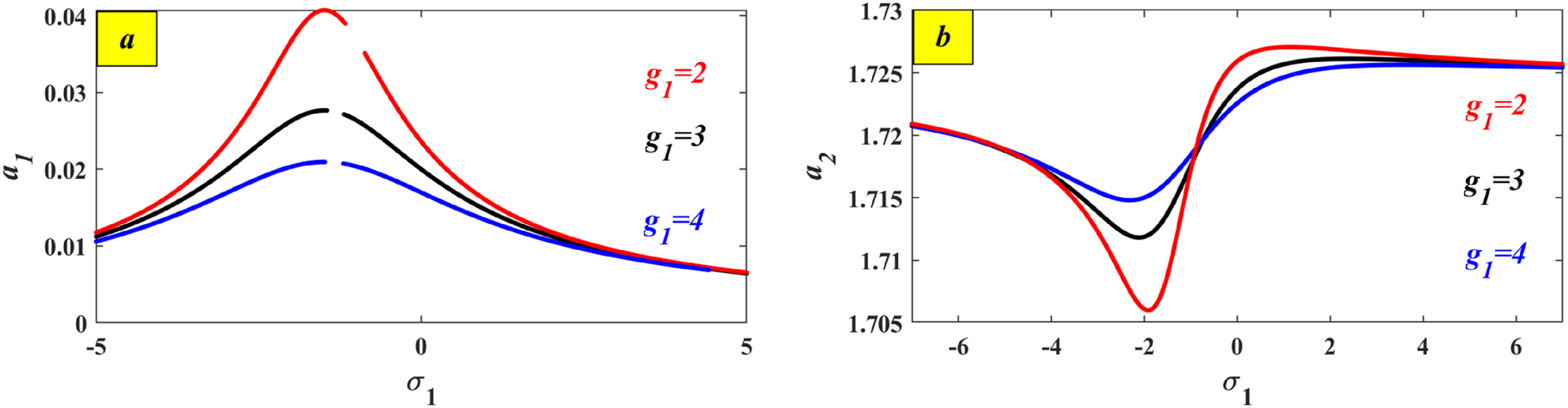
Figures 9 and 10 illustrate the impact of the damping coefficient Incidence retort arc illustrating structure amplitude variation across changed values of the hampering factor The incidence rejoinder bow shows how the structure’s breadth varies with changed ideals of the damping coefficient Frequency retort arc illustrating system amplitude difference across changed values of nonlinear parameter The occurrence reply arc depicts variation in classification corresponding to diverse ethics of the nonlinear parameter 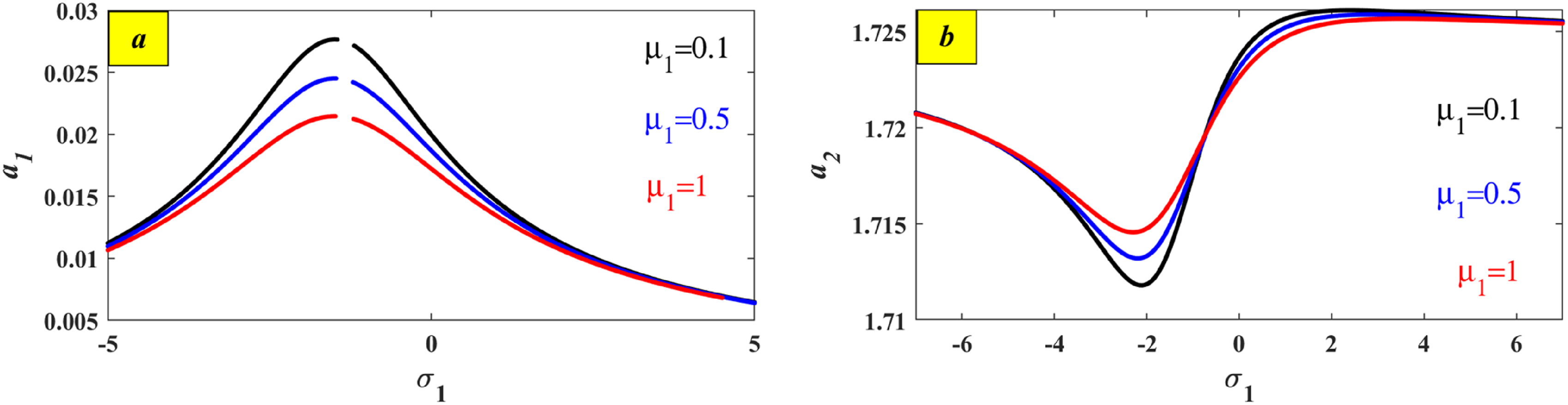
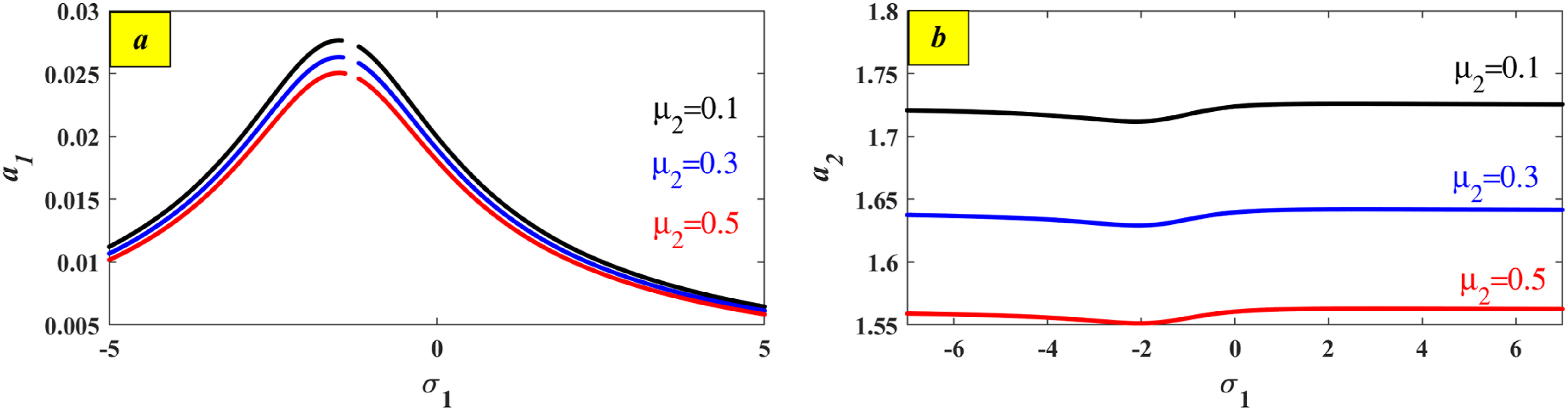
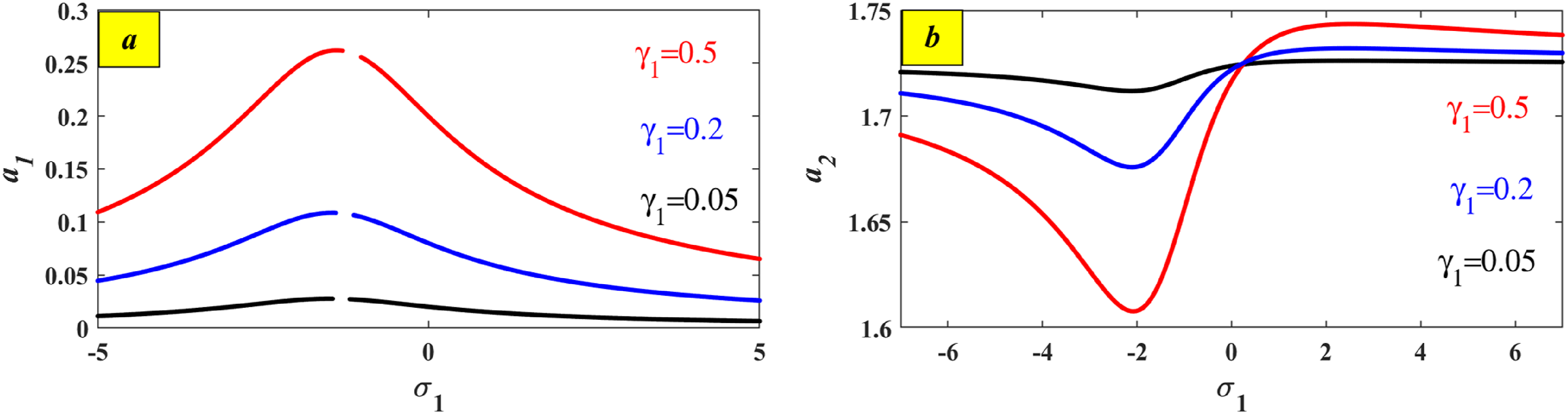
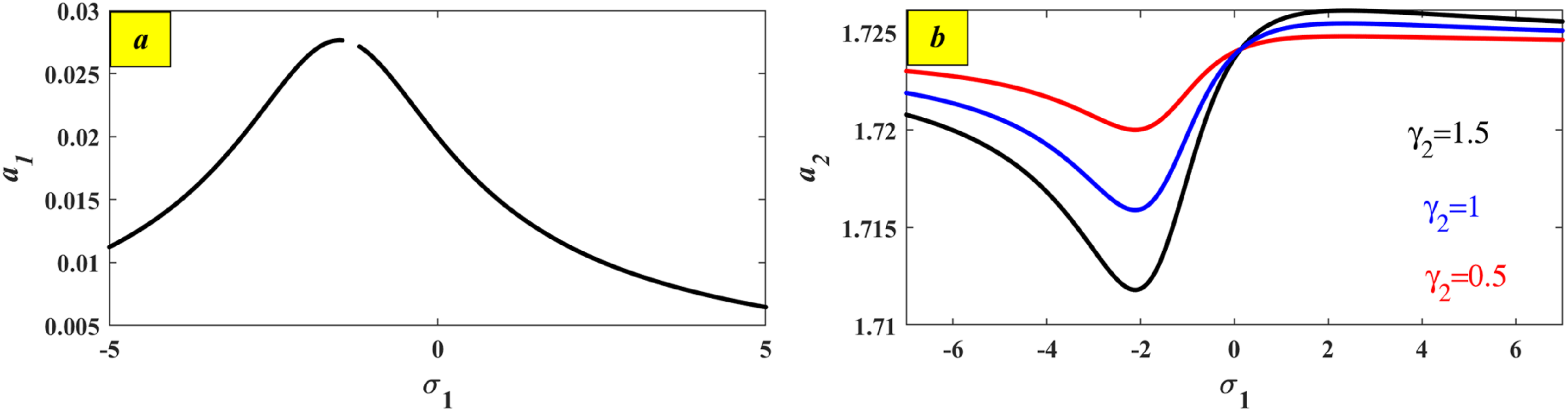
Figure 13 compares three distinct values of the system parameter Result of changeable Outcome of changing 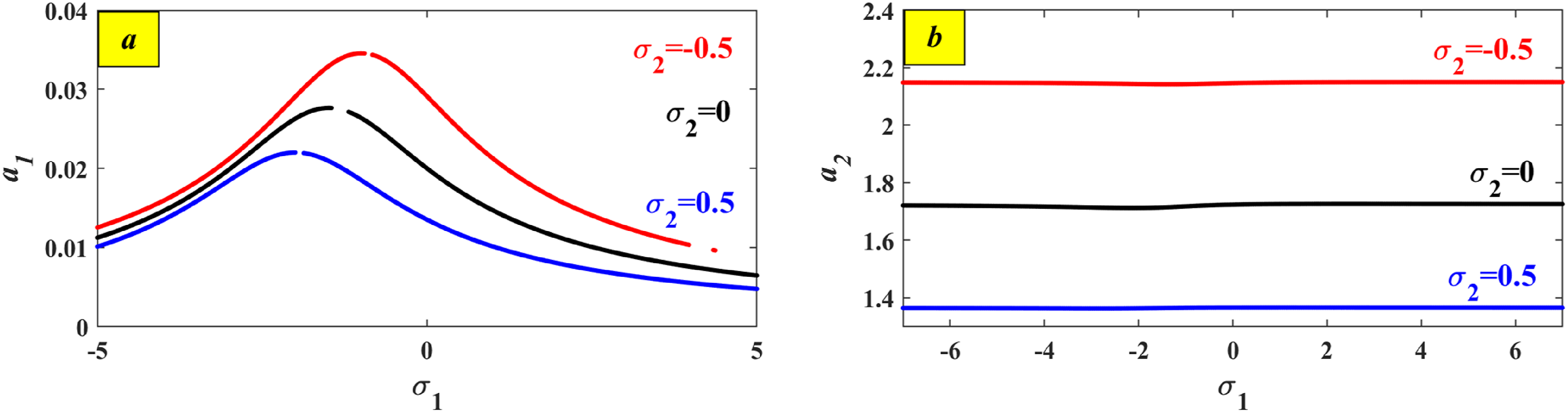
Finally, Figure 15 presents the time-domain responses of the uncontrolled and controlled systems under different excitation conditions Outcome among the changed kinds of force 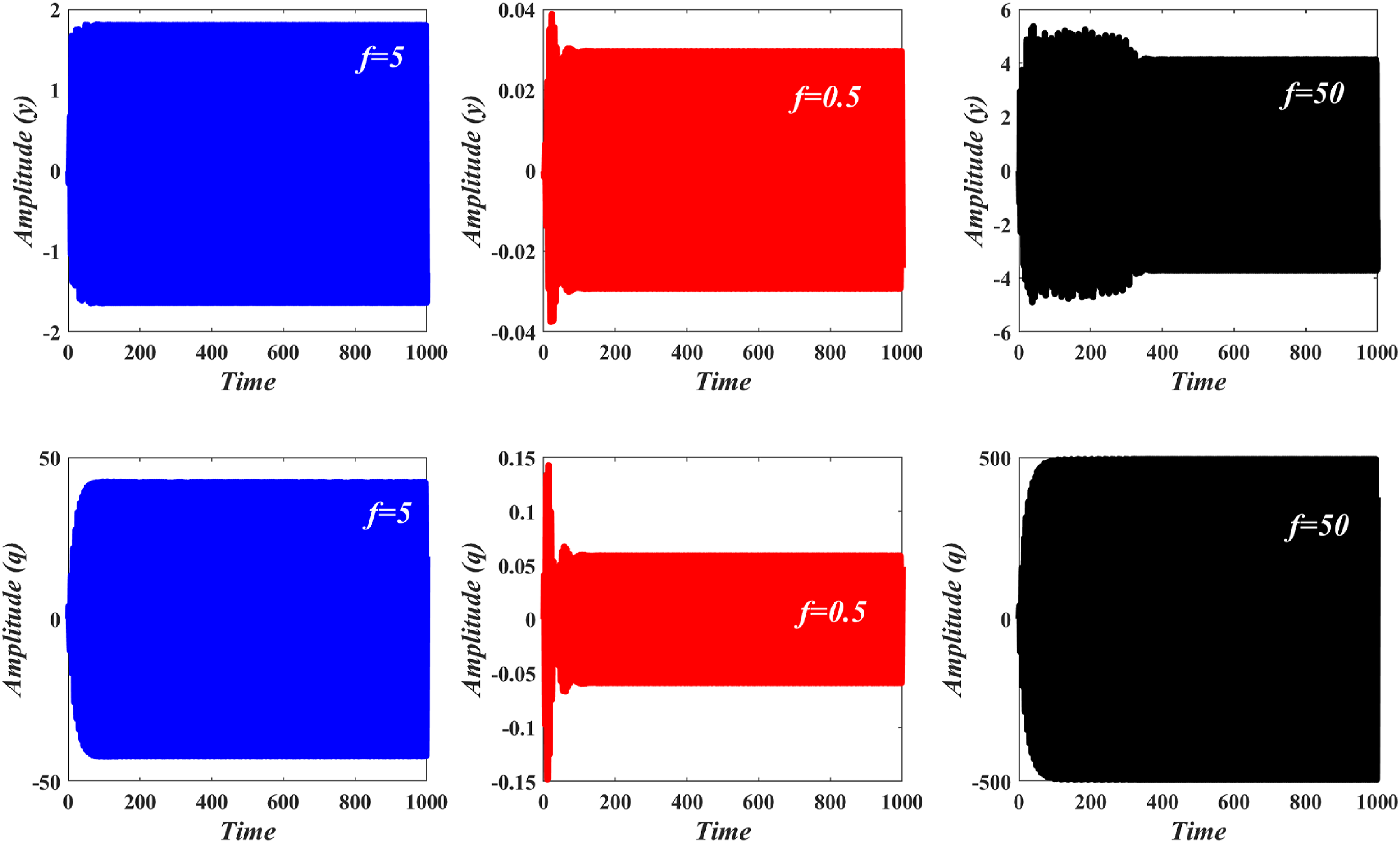
5. Comparison
5.1. Evaluation of the time history beforehand and afterward the controller
Figure 16 compares the vibration suppression performance of different control strategies. The combined controller (NVC+NAC) consistently achieves the lowest vibration amplitudes across all configurations. Compared to the uncontrolled system and single-controller cases, it provides significant vibration attenuation in both modes, demonstrating superior efficiency and robustness. Outcome among the changed kinds of controllers.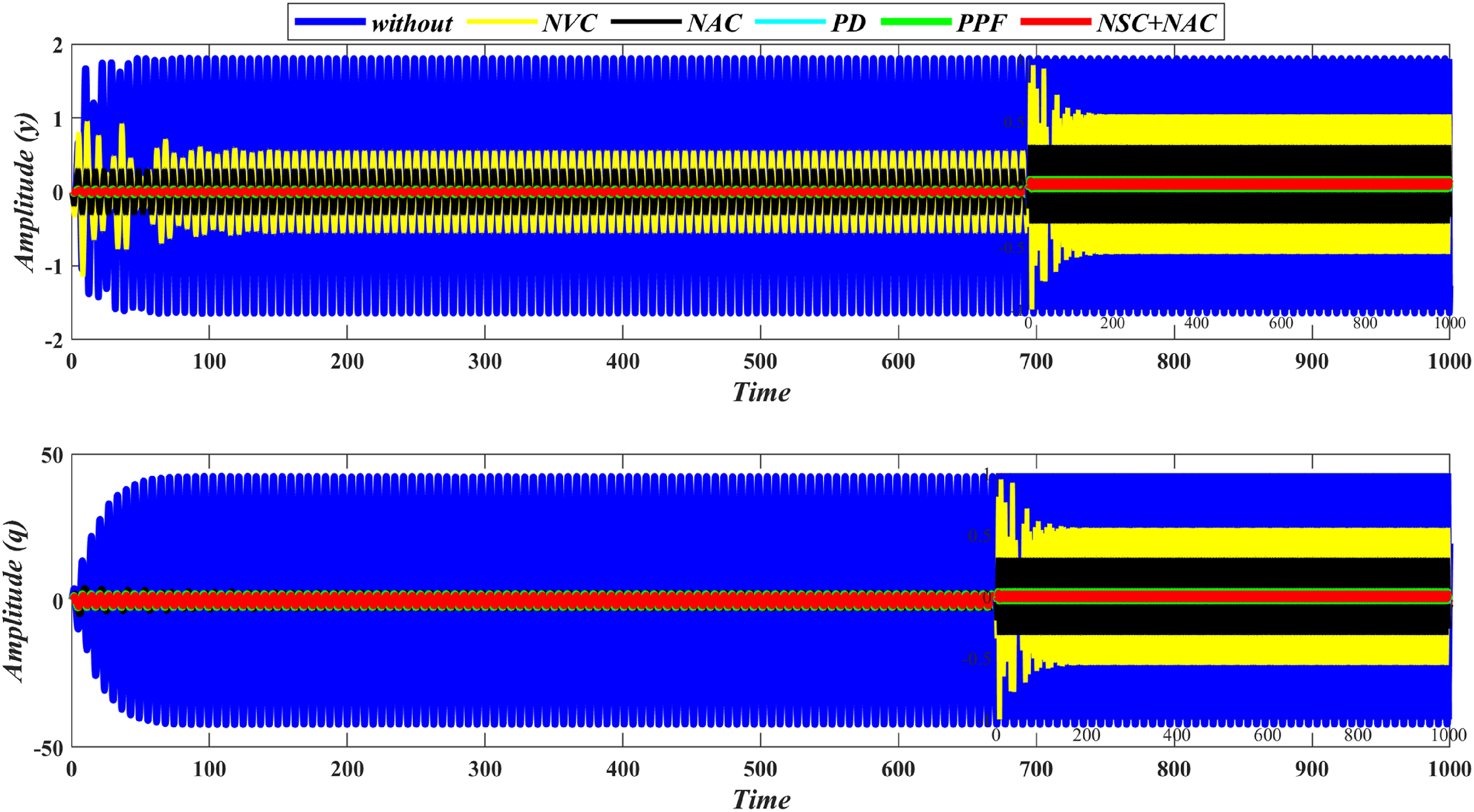
Figure 17 and Table 1 highlight the controller’s effectiveness under various resonance scenarios. Primary and internal resonance cases generate the most severe vibrations in the uncontrolled system. With the (NVC+NAC) controller, vibration amplitudes in the first and second modes are significantly reduced, with reductions exceeding 90% in some cases. Table 1 further quantifies these improvements, showing notable decreases in both vibration energy and response amplitudes. Outcome among the changed kinds of Resonance cases. Outcome of different types of resonance cases on the system.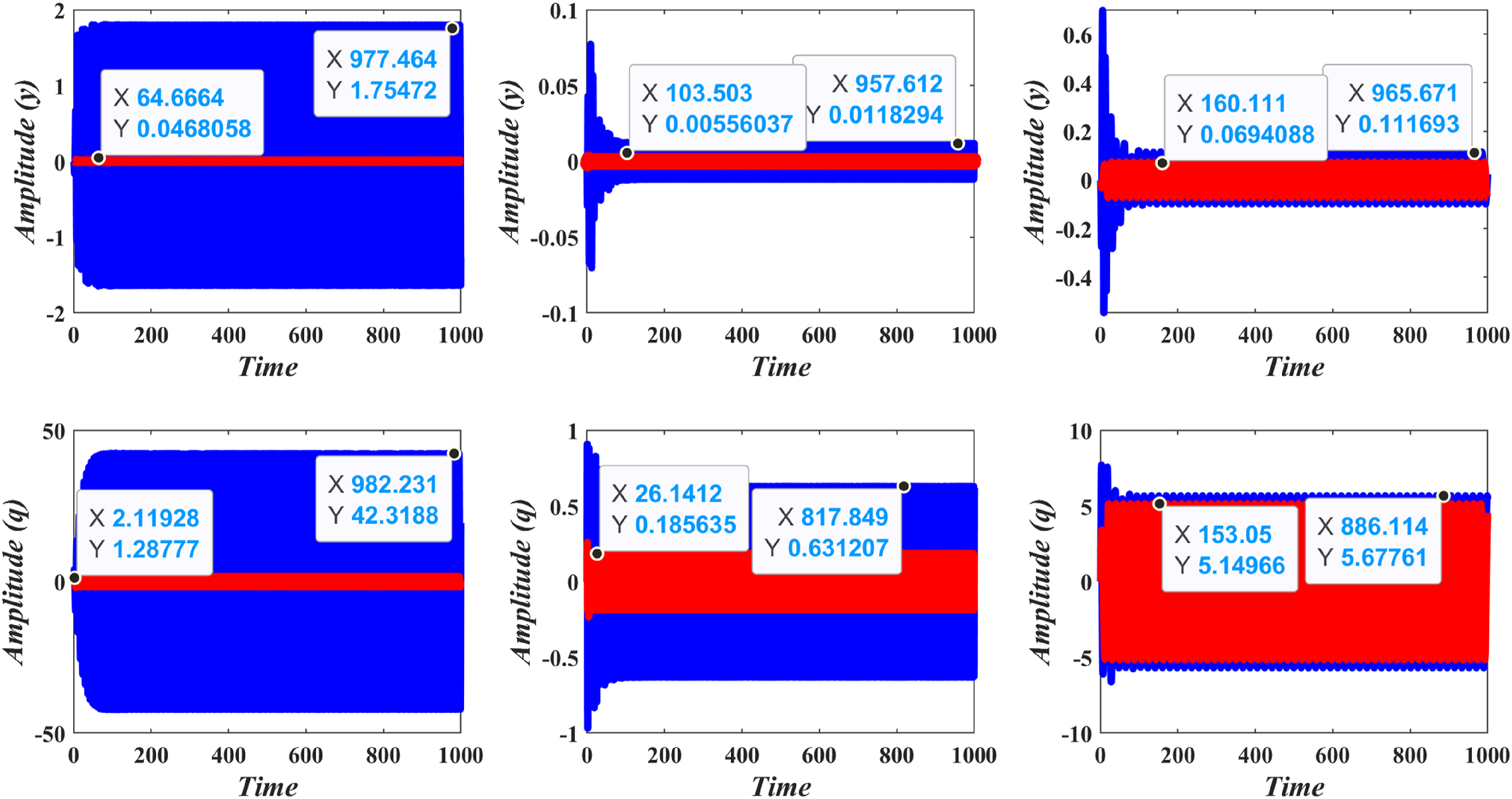
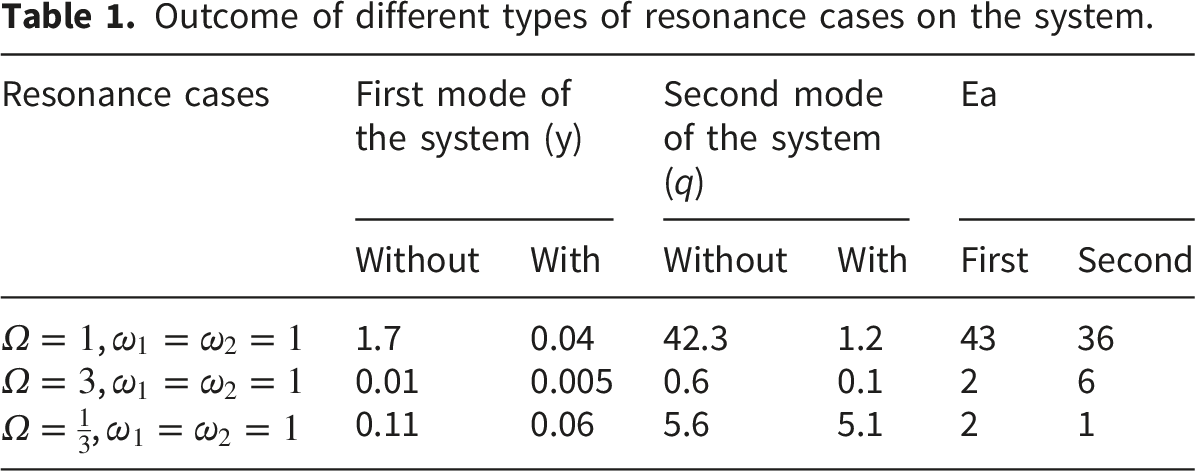
Primary resonance occurs when the excitation frequency approaches the system’s natural frequency, while internal resonance results from modal coupling at specific frequency ratios. The simultaneous presence of both resonances produces the largest dynamic responses, representing a worst-case operating condition. These scenarios are particularly relevant for flexible mechanical and aerospace structures operating near critical speed ranges, where modal interactions are significant.
5.2. Evaluation among trepidation resolution and numerical reproduction
Figures 18 and 19 show an adjacent contract between numerical and estimated findings aimed at equally distributing the uncontrolled and controlled systems using the (NVC+NAC) controller. This substantial association verifies both techniques’ correctness and dependability in recording system behavior under a variety of control settings. The alignment observed in these comparisons demonstrates the steadfastness and effectiveness of the numerical and approximation procedures in analyzing arrangement dynamics. Vibration amplitude of the uncontrolled main system. Contrast between the numerical solution (ـــــــــ) and the approximate solution (………).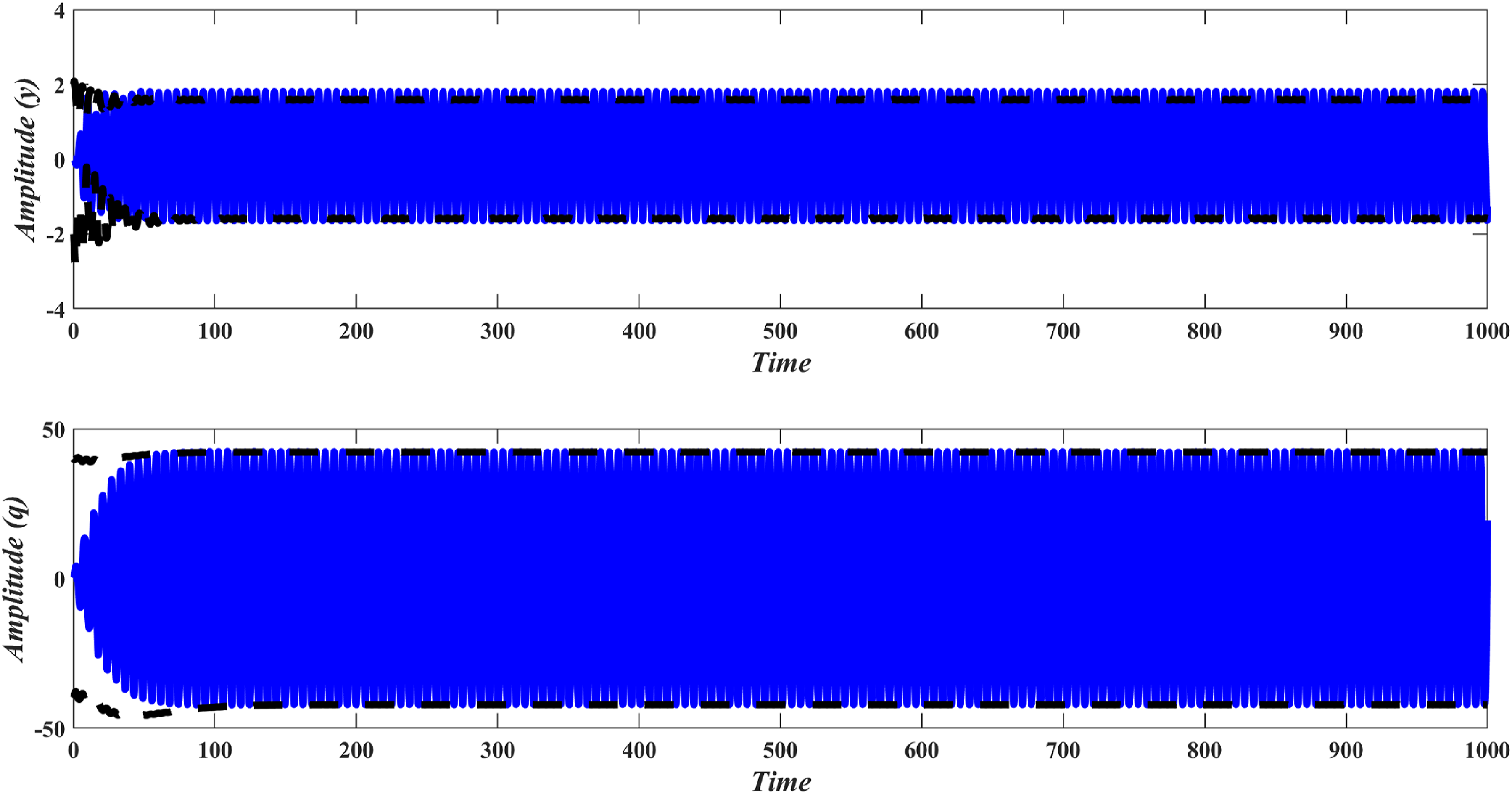
5.3. Assessment through previous work
Reference 7 explores energy harvesting technology, which generates electricity for small devices using magnetic oscillations. It focuses on a (NIMLS), evaluating its energy-harvesting potential while considering the weight of the oscillating central block. The device consists of a magnetic levitation setup linked to an electrodynamic shaker that excites the base, inducing oscillations. The resulting model is a highly nonlinear coupled equation similar to the Duffing oscillator. The Runge-Kutta method is employed to analyze the motion of the central block and the harvested power. The study presents phase planes, Poincaré maps, and parametric variations. Analyzing the system’s time history and key performance metrics demonstrates the usefulness of the applied (NVC+NAC) regulator in minimizing sensations. Findings indicate a significant reduction in vibration amplitude—approximately 97%—with a control effort of around 43 and 36. A stout association between numerical and approximate explanations confirms the accuracy of the approach. This comparison further demonstrates that the proposed (NVC+NAC) controller outperforms existing approaches reported in the literature, both in terms of vibration attenuation and control efficiency.
Comparative analysis between the present magnetic levitation system and related nonlinear vibration and energy harvesting studies.
6. Chaotic behavior and bifurcation analysis
This section investigates chaotic behavior as an essential aspect of understanding the nonlinear dynamic response of the system. As the bifurcation parameter varies, the system undergoes a sequence of qualitative transitions, evolving from periodic motion to quasi-periodic oscillations, followed by the emergence of chaotic-like behavior. With further variation of the parameter, the system recovers a quasi-periodic response before ultimately settling back into a stable periodic state. This non-monotonic transition scenario reflects the complex interplay between nonlinearity, damping, and control effects and is a characteristic feature of many nonlinear dynamical systems.
The analysis is carried out using the dimensionless governing equations (3) and (4), which are reformulated into an equivalent set of first-order state-space equations for numerical implementation. The resulting system is examined using MATLAB to generate bifurcation diagrams, phase portraits, and Poincaré maps that provide complementary insight into the system dynamics.
As illustrated in Figure 20, the bifurcation diagram captures the evolution of the system response with respect to variations in the bifurcation parameter and highlights critical transitions associated with changes in system stability. The appearance of irregular and aperiodic responses following more regular oscillatory motion suggests the onset of chaotic-like dynamics, commonly associated with mechanisms such as frequency interaction and the breakdown of invariant structures in phase space. Bifurcation diagrams of 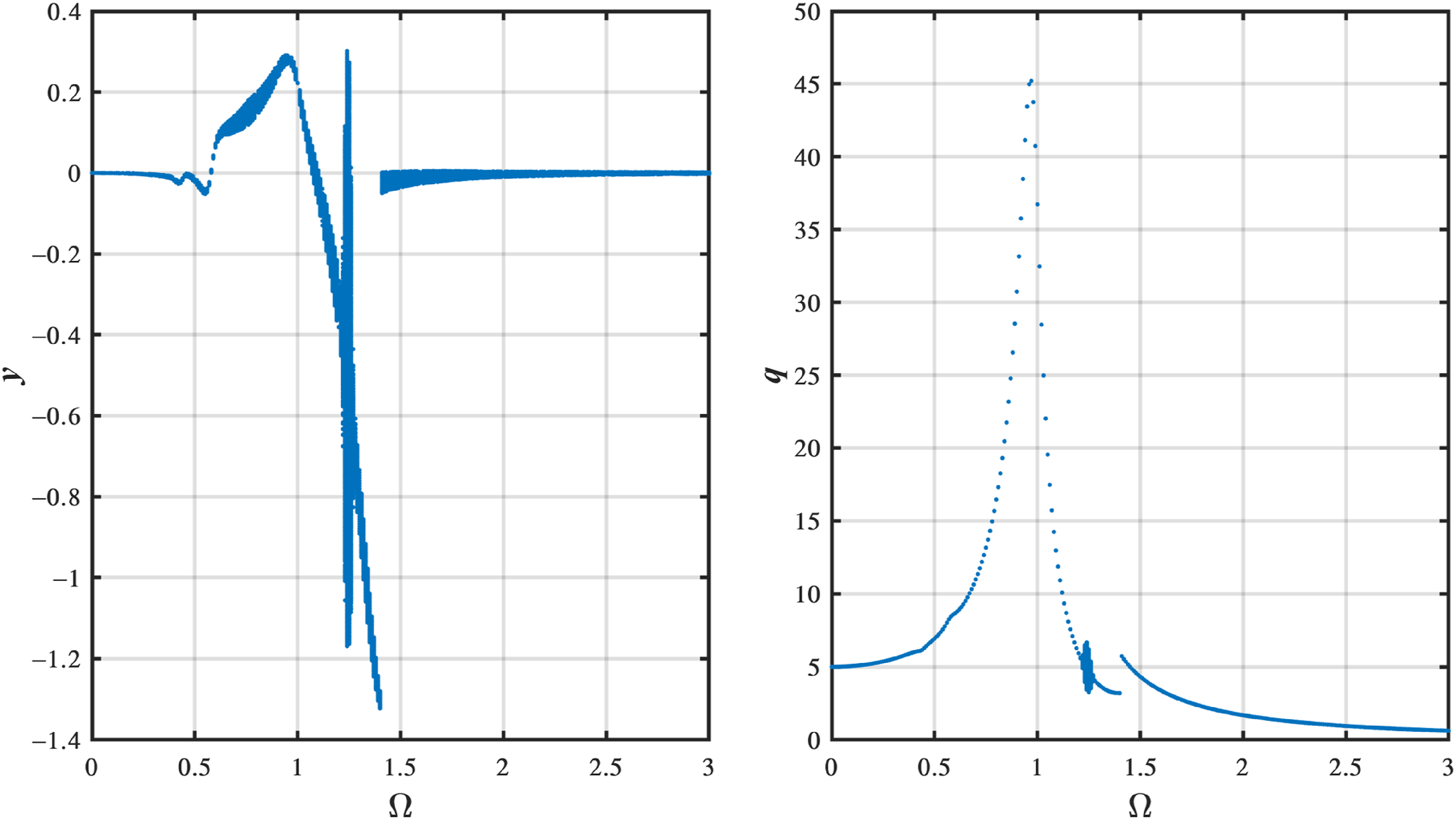
As clearly illustrated in Figure 21, the bifurcation diagram exhibits a wide spectrum of nonlinear dynamic responses as the bifurcation parameter Phase portraits and Poincare maps of the periodic state at 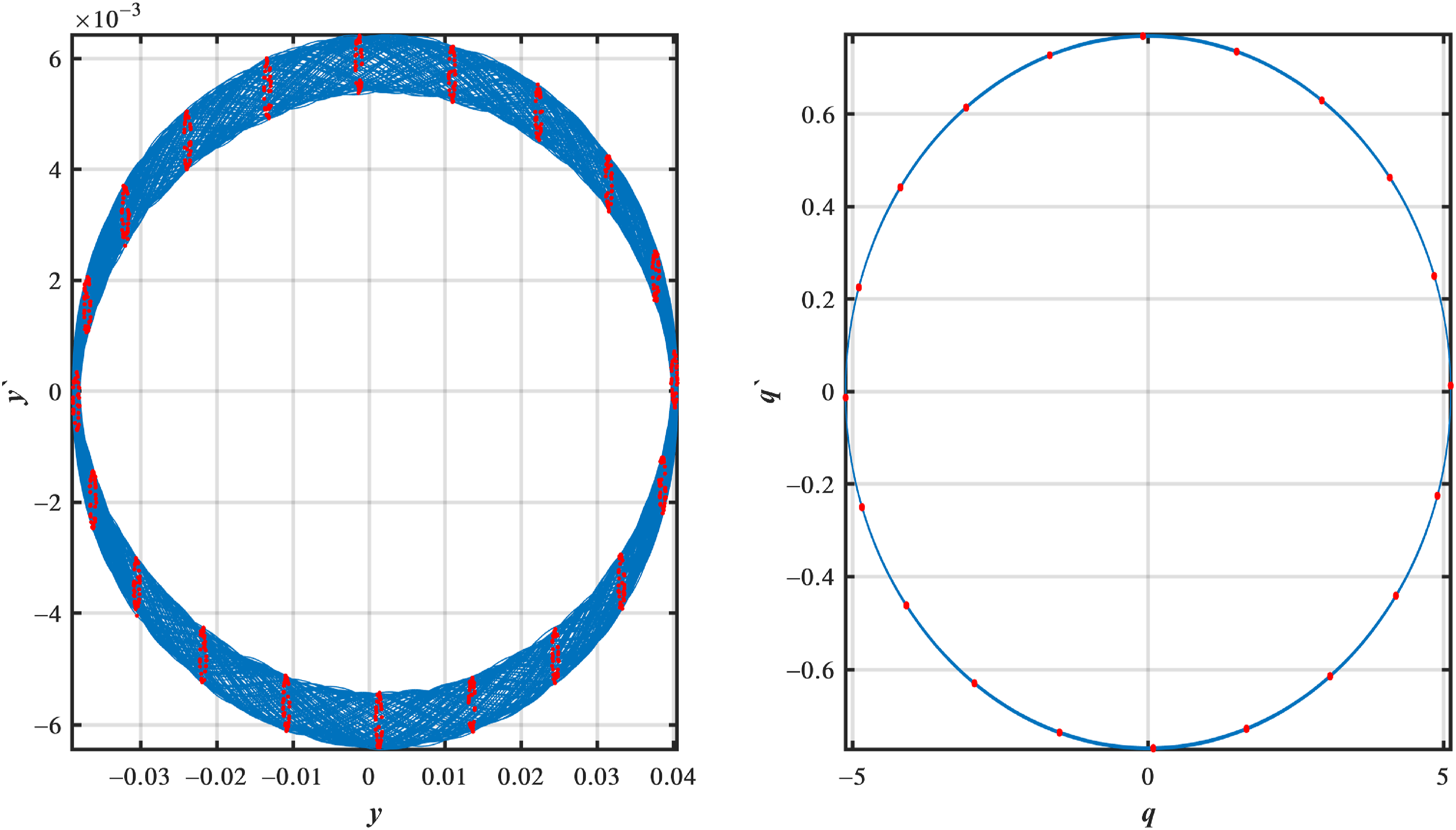
At specific parameter values, namely Phase portraits and Poincare maps of the periodic state at 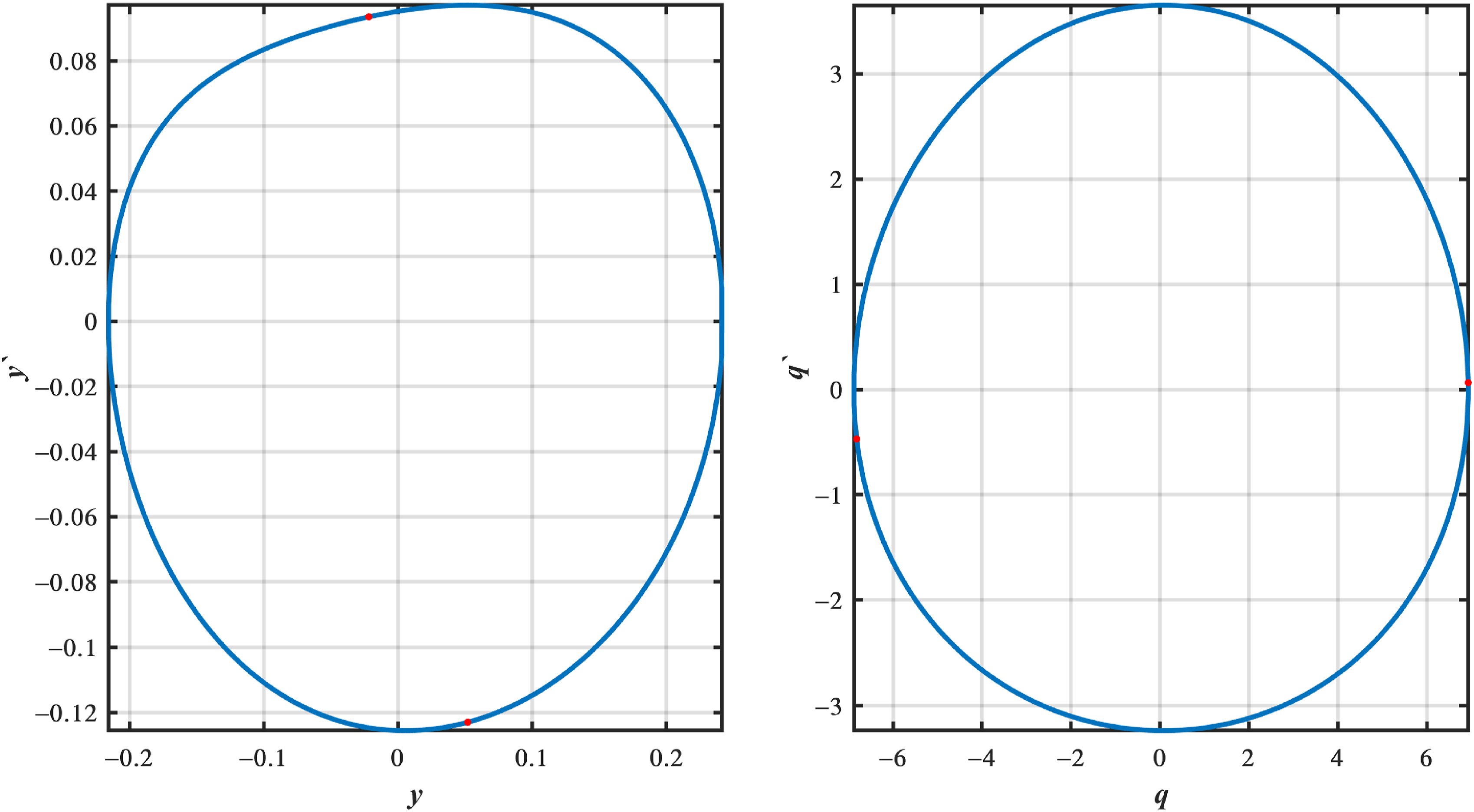
With a further increase in the bifurcation parameter (0.6 ≤ Phase portraits and Poincare maps of the periodic state at 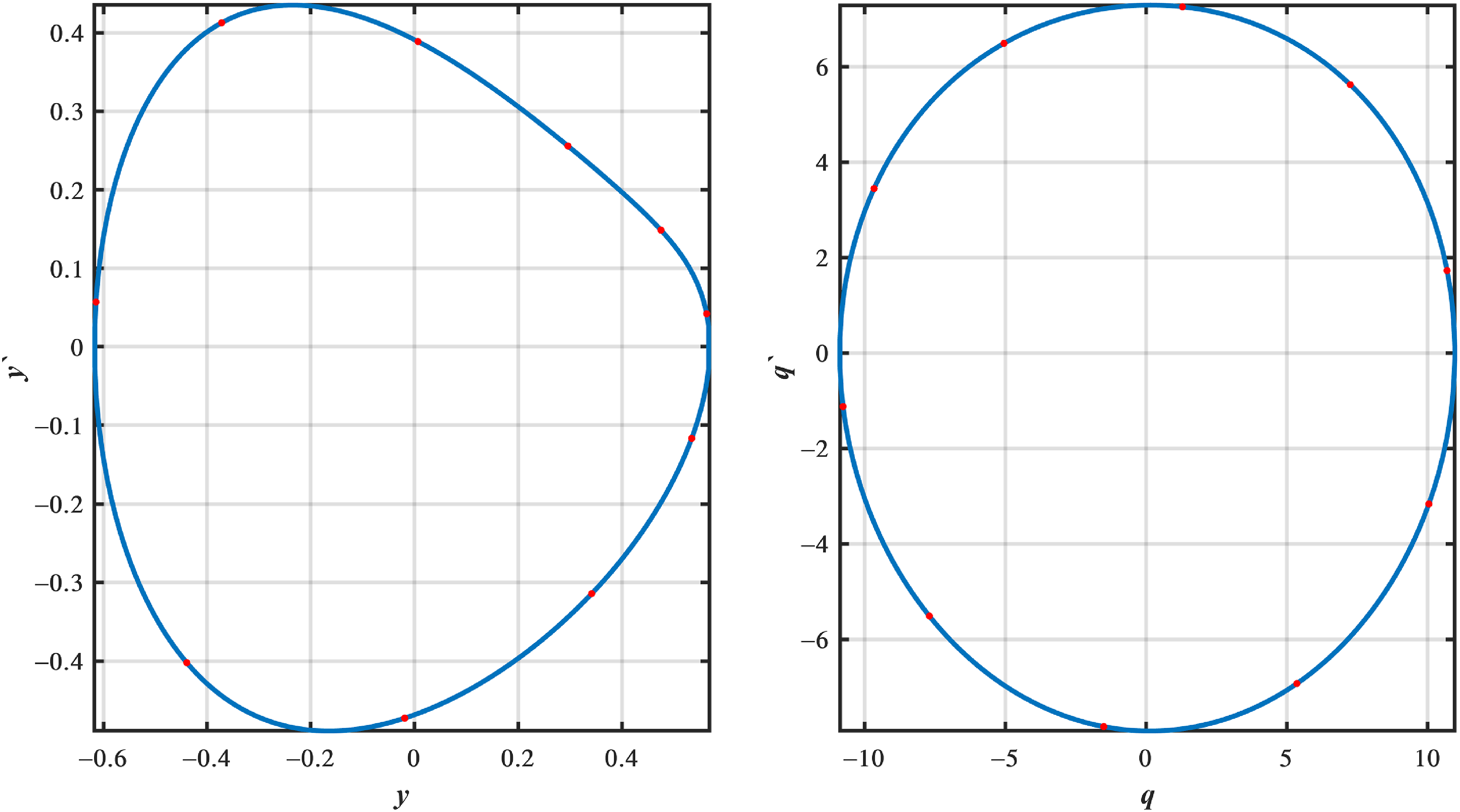
A pronounced transition to chaotic-like dynamics is observed within the narrow interval 1.23 ≤ Phase portraits and Poincare maps of the periodic state at 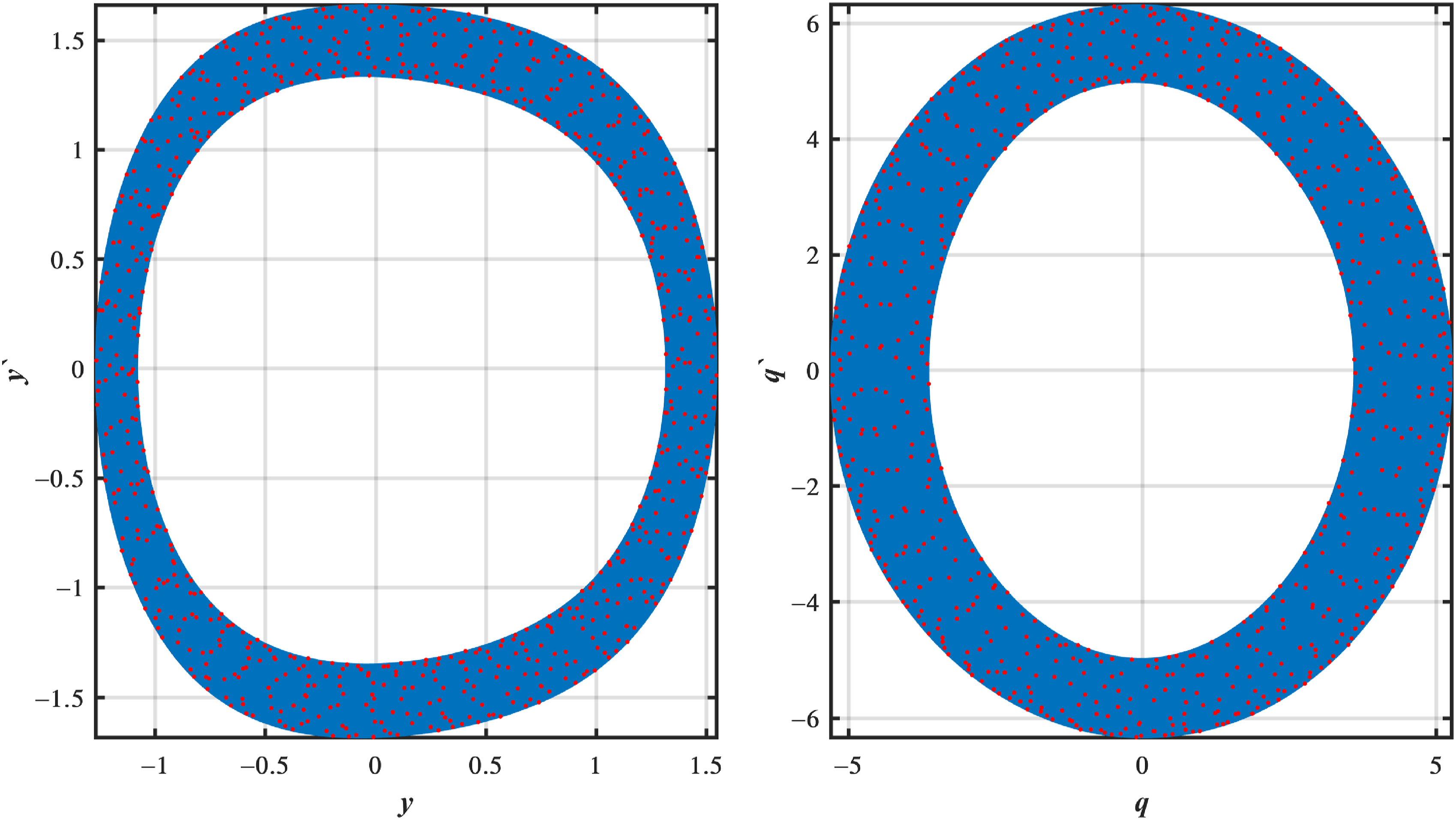
Beyond this chaotic region, the system re-enters a quasi-periodic state for 1.27 ≤ Phase portraits and Poincare maps of the periodic state at 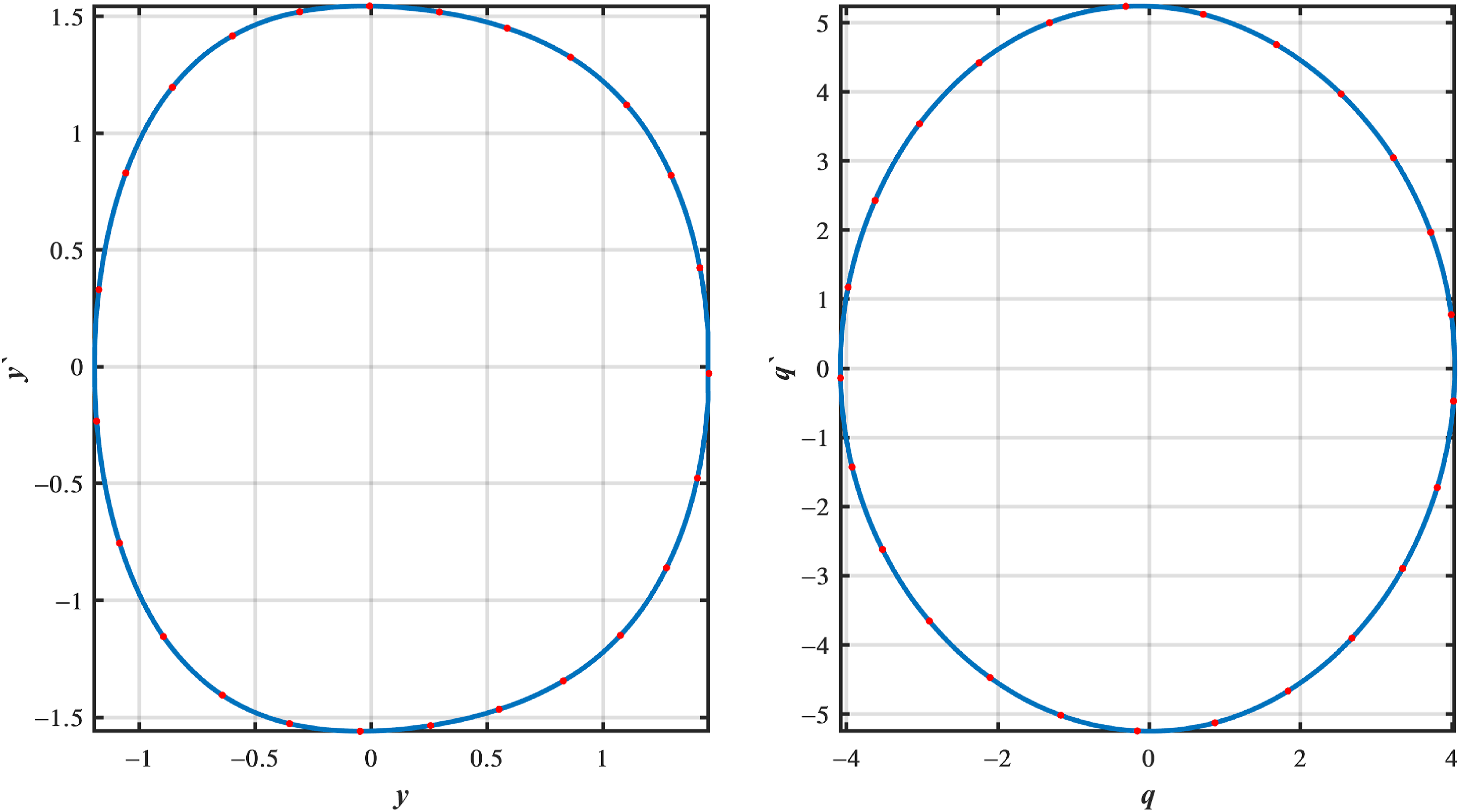
Finally, for larger values of the bifurcation parameter (2 ≤ Phase portraits and Poincare maps of the periodic state at 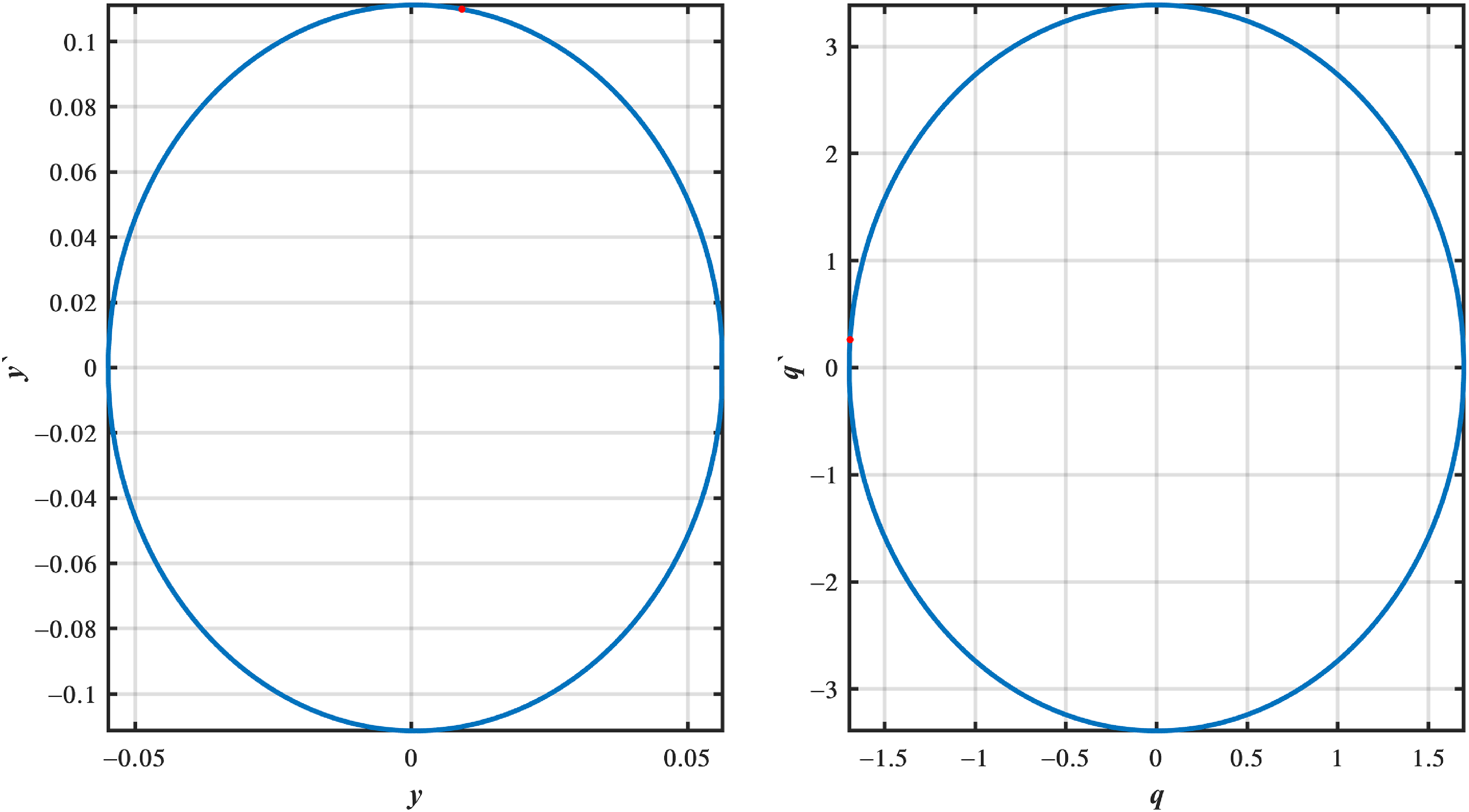
7. Conclusions
This study investigated the vibration control of NIMLS interacting with another body, introducing strong nonlinearities and complex dynamic behavior. The system was modeled using coupled differential equations, and approximate analytical solutions were obtained, alongside numerical simulations, for validation and visualization of the system responses. Frequency response analysis provided insights into the dynamic characteristics and effectiveness of the proposed control strategy, while sensitivity analysis examined the influence of parameter variations on performance and supported controller optimization. Stability analysis ensured reliable system operation and prevented uncontrolled oscillations. The key findings of this study are summarized as follows: ➢ The simultaneous occurrence of primary and internal resonances represents ➢ Implementation of NVC+NAC reduced the vibration amplitude by approximately 97% compared to the uncontrolled case. ➢ The combined controller NVC+NAC demonstrated effectiveness between 36–43, successfully suppressing vibrations in the primary structure. ➢ Controlled systems exhibited enhanced stability under increasing external excitation forces ➢ Increasing the negative linear velocity coefficient ➢ The resonance peak shifted leftward with increasing NVC+NAC values ➢ Numerical and approximate analytical solutions were in close agreement, with frequency response curves showing strong consistency between the analytical method (FRC) and the 4th-order Runge–Kutta simulations. ➢ Specific delayed coupling conditions resulted in the smallest vibration amplitudes ➢ The mathematical model of relative displacement under the (NVC+NAC) strategy exhibited only slight peak overshoot, confirming the controller’s accuracy and responsiveness. ➢ Integration of NVC and NAC controllers substantially enhances vibration suppression, achieving faster stabilization and lower peak responses than conventional methods. ➢ System parameters, including the levitated core’s mass and magnetic field strength, directly influence energy harvesting efficiency, which is maximized under controlled vibrations.
In conclusion, the proposed NVC+NAC controller effectively mitigates complex nonlinear vibrations in magnetically levitated systems, ensuring both vibration suppression and dynamic stability under varying excitations. These results provide valuable insights for the design and operation of nonlinear magnetic levitation systems. Future work will extend this approach to multi-degree-of-freedom and time-delay systems and explore adaptive and intelligent control schemes to further enhance performance and robustness. It should be noted that the stability conclusions presented here are primarily based on time histories and frequency response analysis. Formal nonlinear stability verification (e.g., Lyapunov or bifurcation methods) is not performed in this study. Therefore, the reported “enhanced stability” refers to the observed vibration suppression in simulations. Future work may include rigorous nonlinear stability analysis to fully validate these findings.
7.1. Future work
Applying some different approximate methods like the harmonic method, given the challenges of traditional control methods, we will explore the effectiveness of fractional-order feedback control for suppressing vibrations in the nonlinear dynamical system. Applying some different numerical methods like spectral method. Make comparisons between theoretical research and experimental results. Make simulation models.
Footnotes
Author contributions
A.T.E.-S: Conceptualization, Investigation, resources, software, methodology, writing—original draft preparation, visualization, reviewing, and editing. R. K. H.: Investigation, Methodology, Formal Analysis, reviewing and editing, and funding acquisition. Y.A.A.: Investigation, methodology, data curation, validation, reviewing, and editing. M.A.E.: Methodology, software, validation, data curation, reviewing, and editing. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported and funded by the Deanship of Scientific Research at Imam Mohammad Ibn Saud Islamic University (IMSIU) (grant number IMSIU-DDRSP2603).
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data Availability Statement
All data generated or analyzed during this study are included in this published article.
Appendix
The generalized coordinate of the middle oscillator block is Y, and the electrical part of the shaker is an analogy force voltage based on the law of Kirchhoff loops, where Q is given by the instantaneous electrical charge.
The kinetic energy is given by the motion of the middle block and the inductance of the shaker
L s represent the inductance of the electrodynamical device
The potential energy is given by the gravitational potential energy of the middle block
The Rayleigh–Ritz procedure
The Lagrangian function is obtained
The equations of motion are derived by applying Lagrange’s equations.
Let:
Yields.
Then