
Abstract
This study investigates the effectiveness of a Negative Derivative Feedback (NDF) controller in suppressing vibrations in a two-degree-of-freedom nonlinear system subjected to harmonic excitation. The system incorporates geometrically nonlinear damping, which introduces complex dynamic behavior. To analyze the system’s response, the averaging method is employed to derive approximate analytical solutions, while the fourth-order Runge–Kutta method is used for numerical integration. Particular attention is given to the case of simultaneous resonance
Keywords
Introduction
Vibration control is a critical aspect of modern engineering, playing a vital role in enhancing system stability, performance, and longevity. Early solutions such as tuned mass dampers (TMDs) demonstrated significant effectiveness in mitigating structural vibrations, especially in systems exposed to dynamic excitations like earthquakes and machinery-induced forces. 1 These passive methods laid the groundwork for further advancements in the field. Semi-active control strategies, such as feedforward control applied in renewable energy systems like floating oscillating water columns (OWC), have shown promise in optimizing dynamic performance under varying load conditions. 2 In rotating machinery, passive absorbers remain essential in reducing vibrations caused by rotor-stator contact. 3 The integration of smart structures and hybrid control techniques, which combine passive and active elements, represents a significant leap in vibration mitigation, overcoming limitations of traditional methods. 4 Such advances have extended to biological systems as well, with resonance-based testing devices enhancing understanding of skeletal vibration responses. 5 Optimization of TMD parameters for damped primary systems has further refined their effectiveness, 6 while their adaptability is evident in specialized implementations such as tall reinforced concrete chimneys subjected to pulse-like ground motions. 7 Nonlinear absorbers, including nonlinear energy sinks (NES), have gained increasing attention for their broadband vibration mitigation capabilities due to geometrically nonlinear damping and stiffness characteristics.8,9
Analytical studies of resonance phenomena in mechanical systems like cart-pendulums and double pendulums have provided valuable insights into system stability near resonance.10–12 Advanced feedback control methods including positive position feedback and velocity-based controllers have been successfully applied to suspended cables and cantilever beams, enhancing vibration suppression.13,14 Theoretical analyses of nonlinear single-degree-of-freedom (SDOF) systems under multifrequency excitations continue to inform controller design. 15 Hybrid oscillators such as Rayleigh–Van der Pol–Duffing systems have served as important models for exploring PD controllers and velocity-position feedback strategies aimed at stabilizing complex dynamics.16,17 Further improvements have been proposed through nonlinear intelligent positive position feedback (NIPPF) controllers to optimize hybrid oscillator performance. 18 Nonlinear control techniques have also been applied to offshore wind turbine towers, revealing adaptive solutions to environmental loading challenges. 19 Recent studies have focused on gyroscopic systems with restricted and small rotation dynamics, enhancing understanding of vibration behavior in constrained mechanical setups.20–22 The design and analysis of hybrid controllers using non-perturbative methods for oscillation suppression continue to advance, with negative velocity feedback and (NDF) controllers demonstrating effectiveness in hybrid oscillator systems.23–25 Research into quasi-zero stiffness systems exhibiting chaotic behavior under multiple control strategies further enriches the field, 26 alongside investigations of planar double pendulum dynamics near resonance. 27 Piezoelectric-based systems have gained prominence for their energy harvesting capabilities combined with feedback control, analyzed through stability and bifurcation studies.28,29 Higher-order multiple degrees-of-freedom systems also receive attention for their complex vibrational behaviors and responses to feedback control near resonance. 30 Building on this extensive and interconnected body of research, the present study proposes a novel hybrid vibration suppression approach. By integrating a nonlinear energy sink (NES) with a nonlinear derivative feedback (NDF) controller, the study aims to combine passive robustness with active adaptability, offering a general and effective solution for nonlinear, multi-degree-of-freedom dynamic systems facing modern engineering challenges
Intrinsic system dynamics
To analyze geometrically nonlinear damping, we employ a mathematical model based on a simplified one-degree-of-freedom harmonic oscillator.
9
Harmonic oscillators, characterized by their ability to exhibit harmonic motion, are simplified here to represent a system undergoing sinusoidal motion due to a restoring force proportional to its displacement

Impact of NDF control on system dynamics


Figure 1 illustrates a linear oscillator, a mechanical system that exhibits harmonic motion governed by linear dynamics. Such systems typically comply with Hooke’s Law, where the restoring force is directly proportional to the displacement from the equilibrium position. Due to its simplicity and analytical tractability, the linear oscillator serves as a fundamental model widely employed in both physics and engineering to understand a range of vibrational phenomena. The system’s behavior is influenced by several key parameters: the damping coefficient, denoted by The schematic flowchart of the primary system incorporates NDF controllers.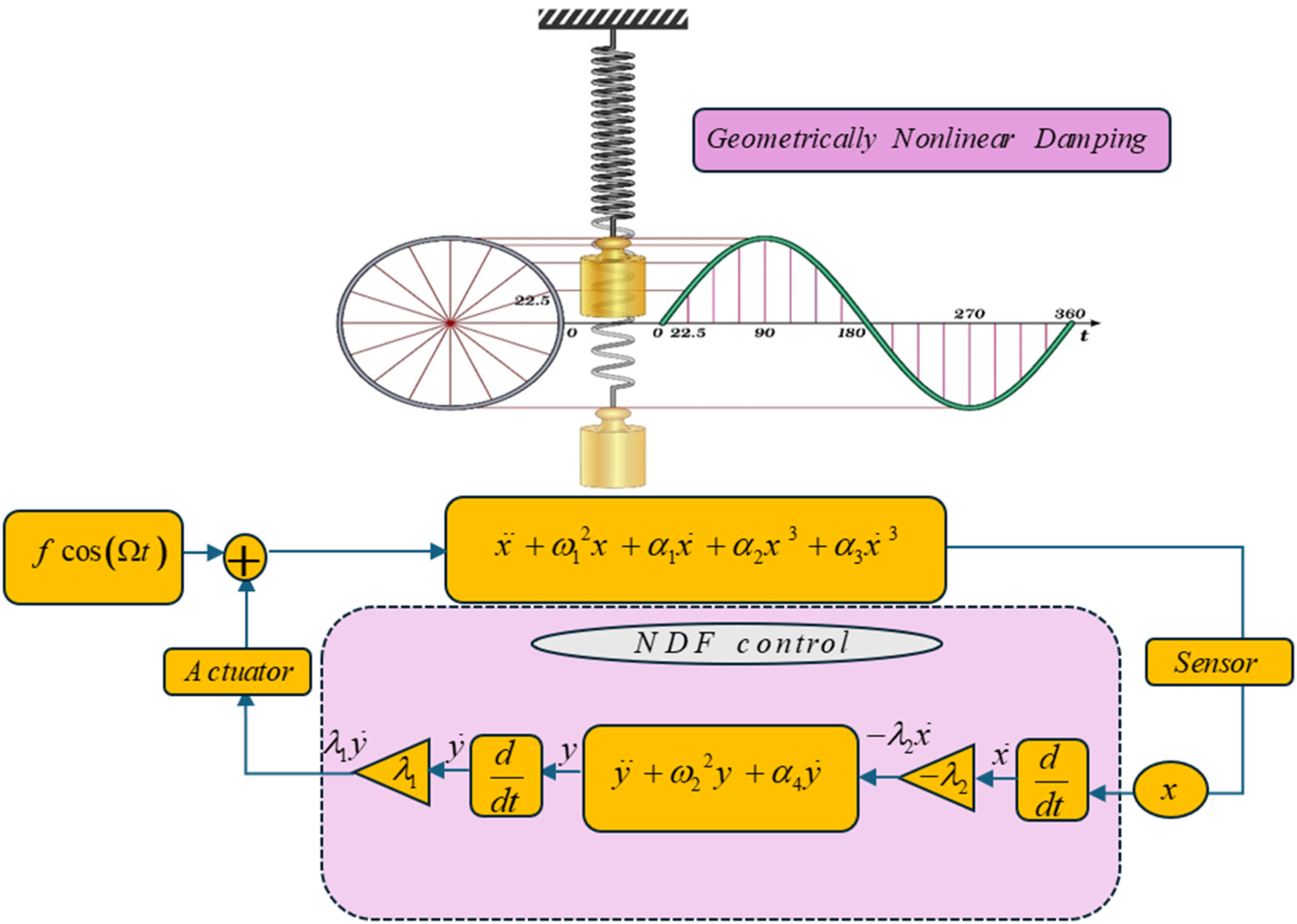
Mathematical analysis
Mathematical analysis (averaging method)
Employing the technique of average. Using the variation of the parameter’s method, we will first convert the dependent variable x into two dependent variables before applying the averaging strategy, as per Nayfeh (1985). The free oscillation term, including its phase and magnitude. In order to do this, we observe that equations (2) and (3) has a generic solution of




While still adhering to the form presented in equations (4) and (5), and subject to the constraint in equations (6) and (7), the solution to equations (2) and (3) nonetheless.


By comparing equations (6), (7), (9), and (10) we have the following equation


Again, we will differentiate equations (6) and (7) with respect to


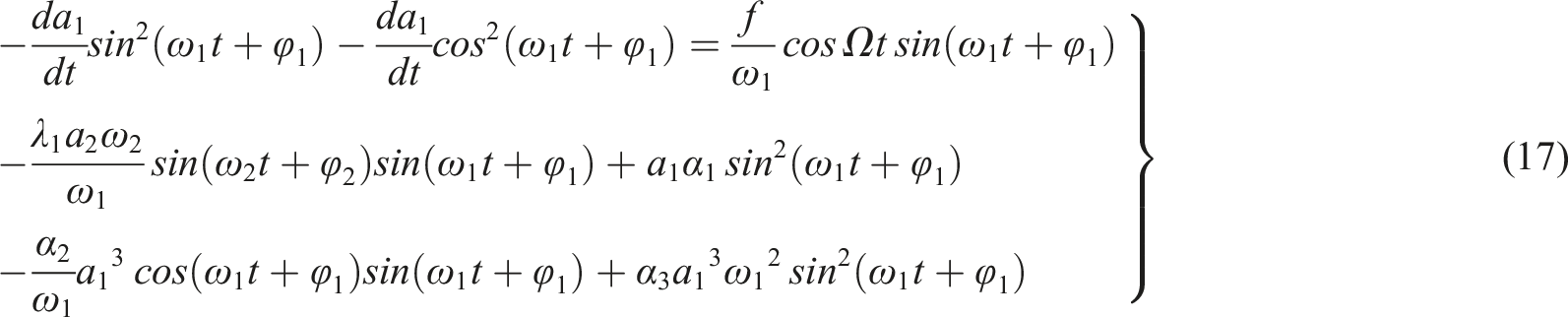
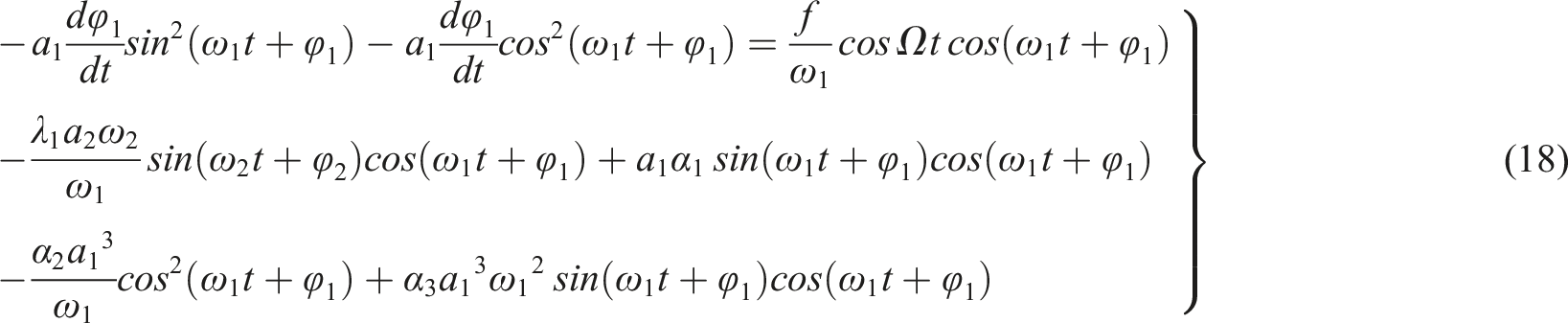
Now substituting from equations (13) and (14) into equations (2) and (3) to obtain the following equation




Periodic solution
Here, the chosen resonant case:







After evaluating all integrals in equations (22) to (25), we got the following




The effectiveness of the control rule will be evaluated by determining the equilibrium solutions of equations and analyzing their stability with respect to the parameters
Frequency response equations
A potential method for identifying the fixed point associated with the steady-state solution of equations (26) to (29) involves the insertion of appropriate values.




Squaring, then adding both sides of equations (32) and (33) to obtain the following one

From equations (32) and (33), we have


Inserting (35) and (36) into (30) and (31), we get




By forming and totaling the equations (38) and (40), we get

The steady-state response of the system to constant input signals is governed by the frequency-response equations (35) to (40). These equations provide a mathematical representation of the system’s behavior across a spectrum of frequencies, that is, (
Stability analysis based on linearization of the system
To determine the stability of the equilibrium solution, we analyzed the eigenvalues of the Jacobian matrix derived from equations (26) to (29). The sign of the real part of each eigenvalue determines stability: negative real parts indicate asymptotic stability, while any positive real part signifies instability. This analysis is based on the system’s response to small perturbations around the equilibrium





Equations (43) to (46) can be presented in the following matrix form


Therefore, the stability of the steady-state solutions is determined by examining the eigenvalues of the Jacobian matrix. This analysis yields the following eigenvalue equation

Which of the following polynomials has the following roots


Results and discussions
Time history performance without NDF controller
Within this segment, we solved equations (2) and (3) numerically using the fourth-order Runge–Kutta method. The GND system’s time histories were examined both prior to and following the implementation of control measures to assess the effectiveness of the interventions using the NDF controller have been studied at the dimensionless system parameters of equations (26) to (29) as:
Additionally, we used MATLAB solver ODE45 to obtain the numerical solutions of equations (2) and (3). The uncontrolled system has been illustrated at the worst resonance case, Response and phase of the uncontrolled system at the simultaneous resonance case 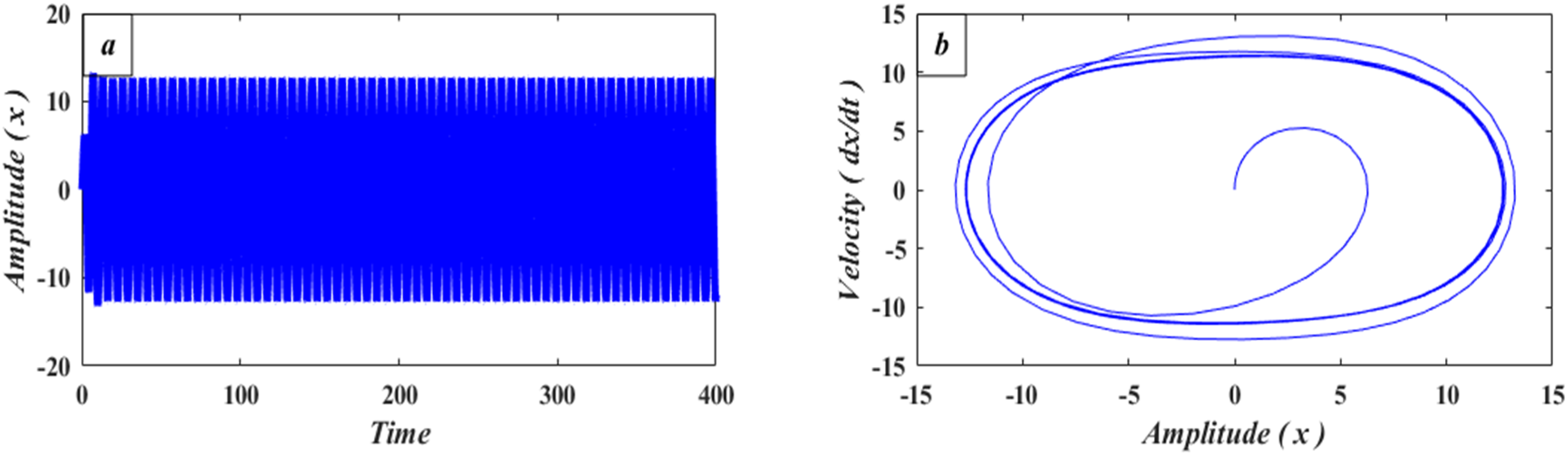
Time history performance with NDF controller
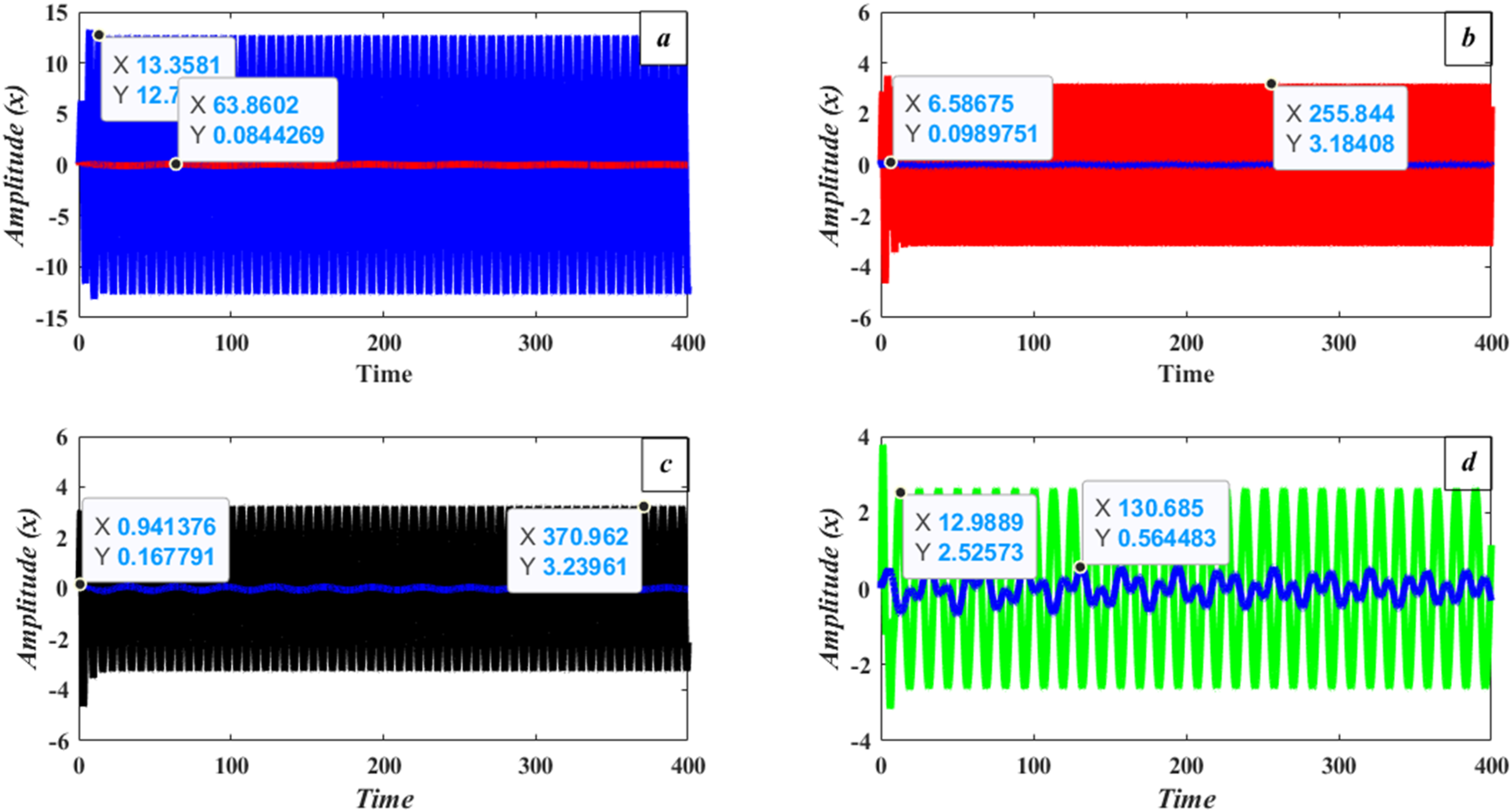
Figure 3 elucidates time history for the GND system after using the NDF controller at resonance case Response of controlled system at simultaneous resonance case 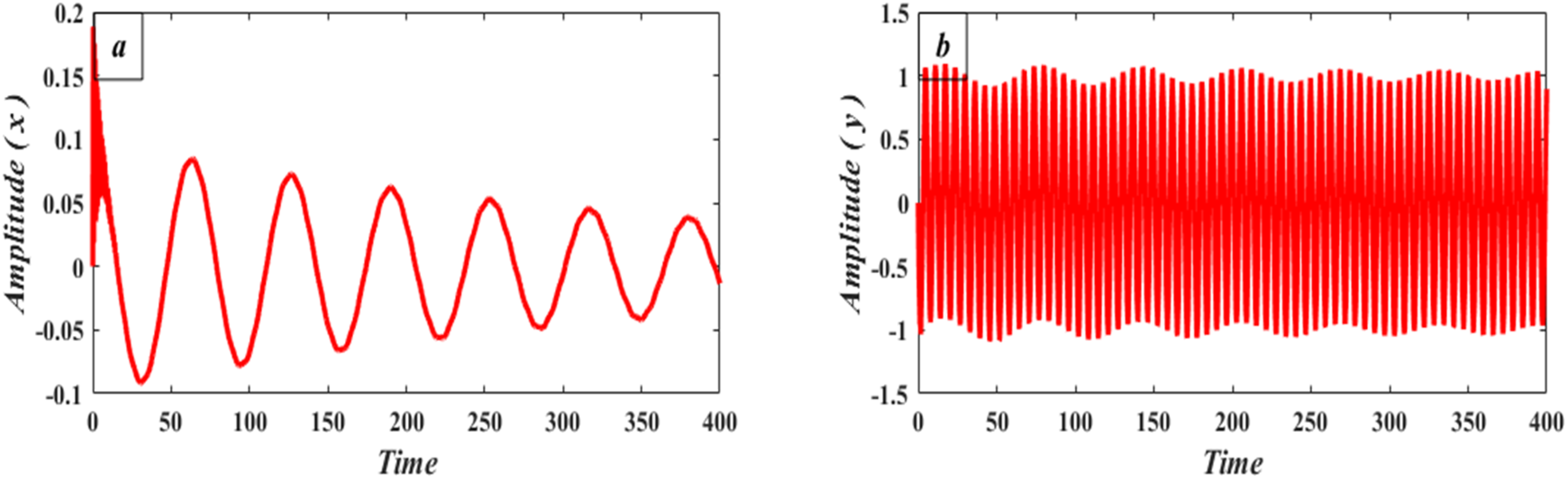
Different operation conditions
Different resonance cases before and after the NDF controller.

Response of the controlled system at different resonance cases.
Frequency response curves (FRC)
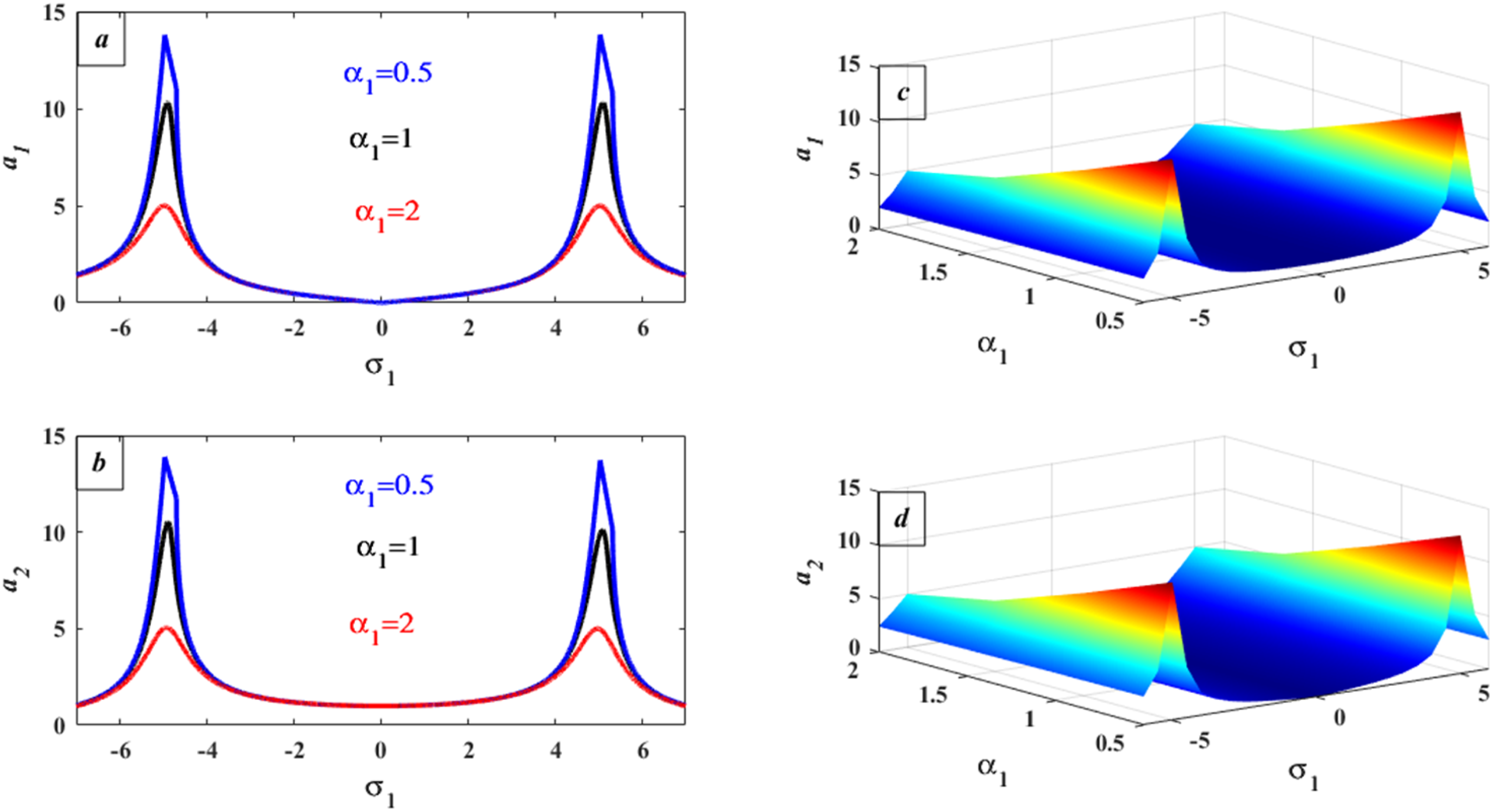
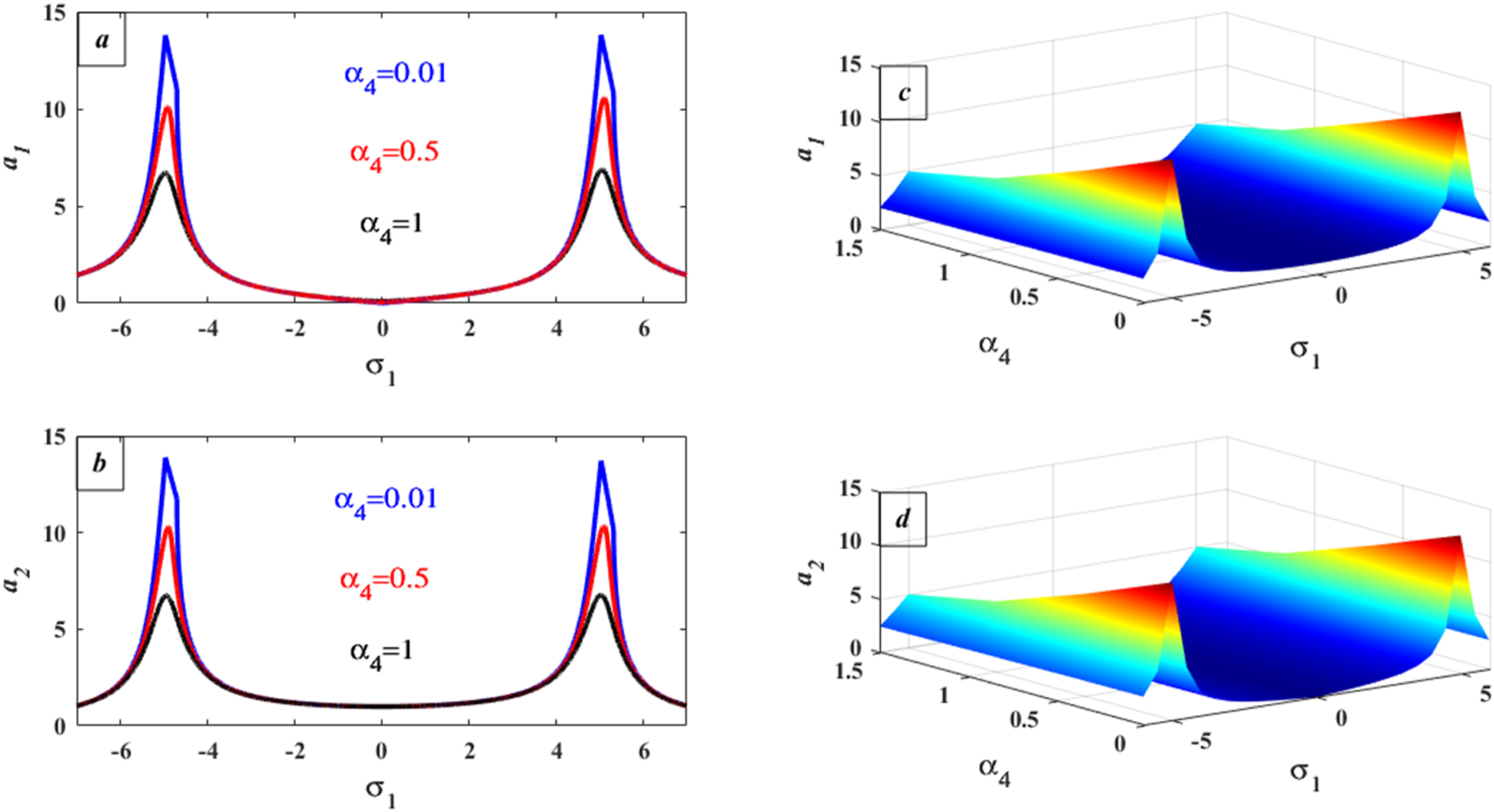
This section investigates the dynamic response of the GND system equipped with (NDF) controller under harmonic excitation. The steady-state amplitudes and bandwidth variations are examined as a function of various system parameters using both numerical simulations and perturbation methods. The perturbation-based steady-state solutions were obtained by substituting The regulated system’s frequency response curves.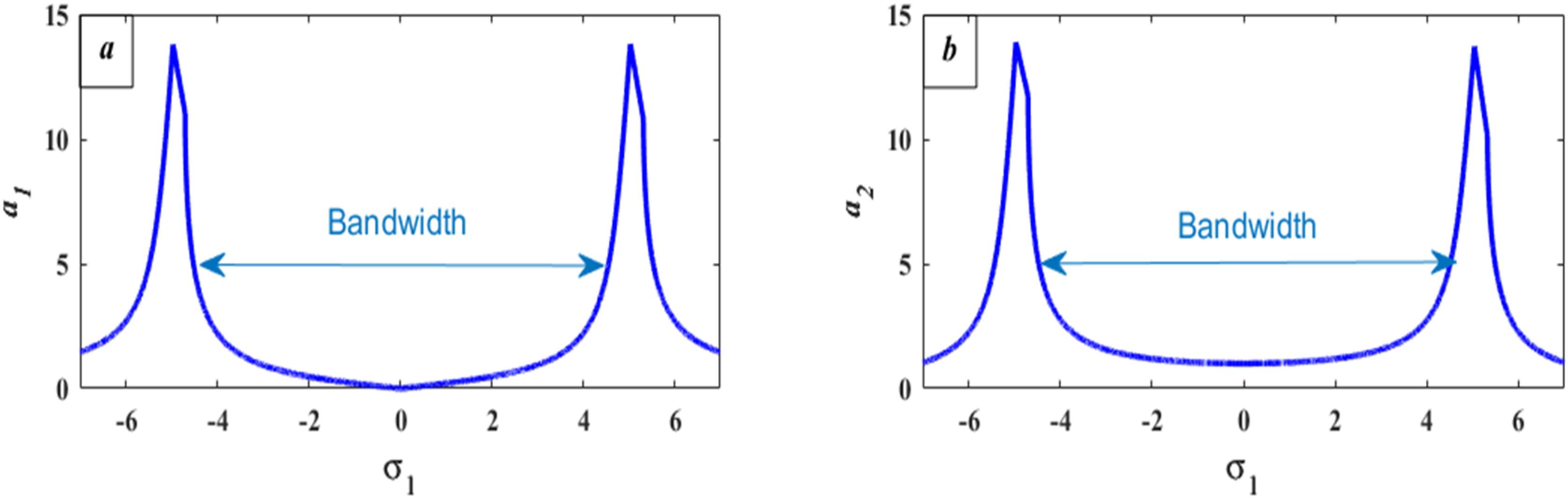
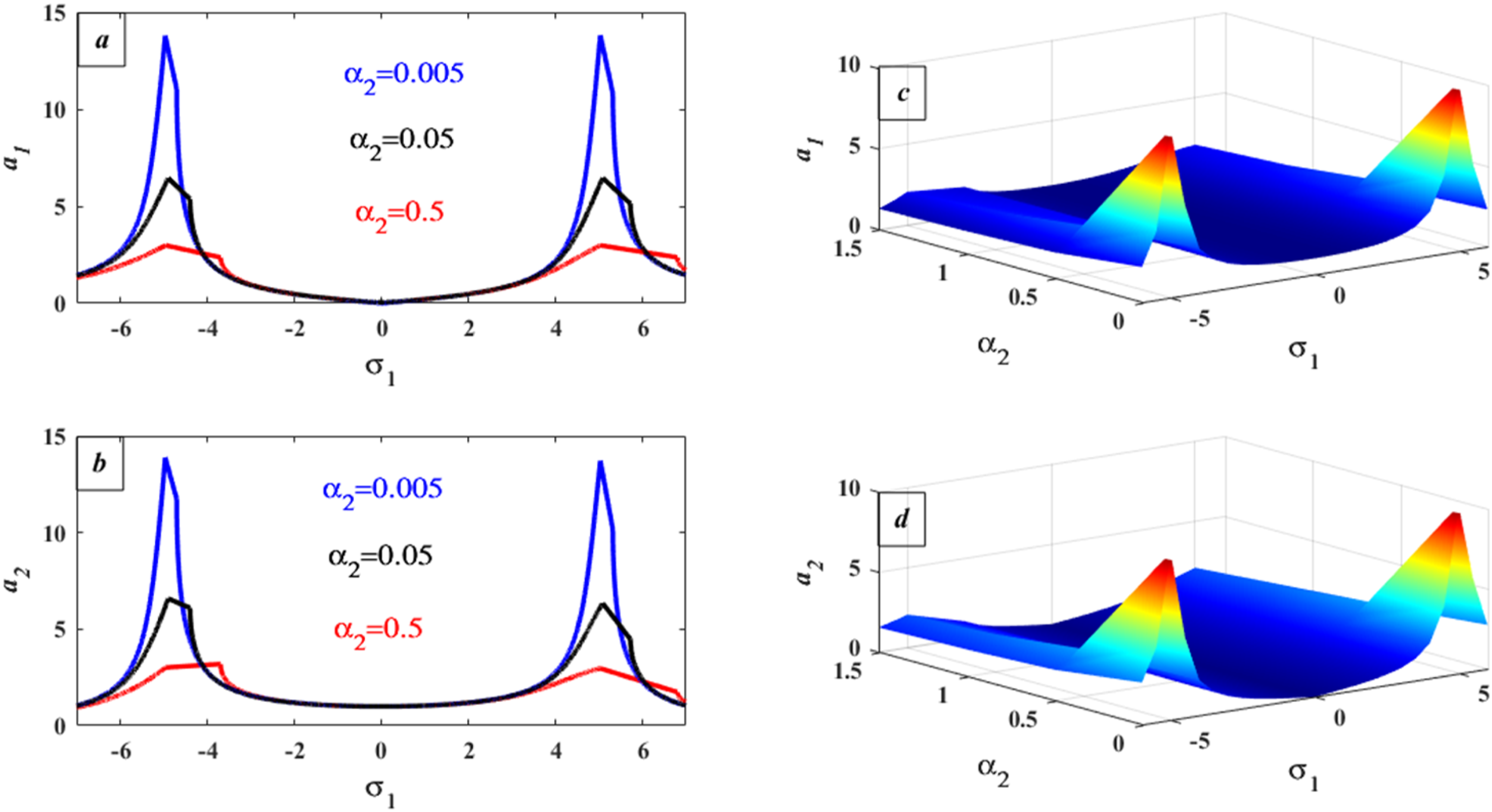
As illustrated in Figure 6, increasing the amplitude of the external excitation results in a monotonic increase in the vibration amplitudes of both the GND system and the NDF controller. However, this is accompanied by a noticeable reduction in the bandwidth, thereby limiting the frequency range over which the controller remains effective. As shown in Figure 7, increasing The frequency response curves of the controlled system at varying amounts of external force The frequency response curves of the controlled system at varying amounts of damping coefficient The frequency response curves of the controlled system with varying values of the controller’s damping coefficient The frequency response curves of the controlled system at dissimilar values of the control signal The frequency response curves of the controlled system at diverse values of the feedback signal The frequency response curves of controlled system at different values of controller’s nonlinear parameter coefficient 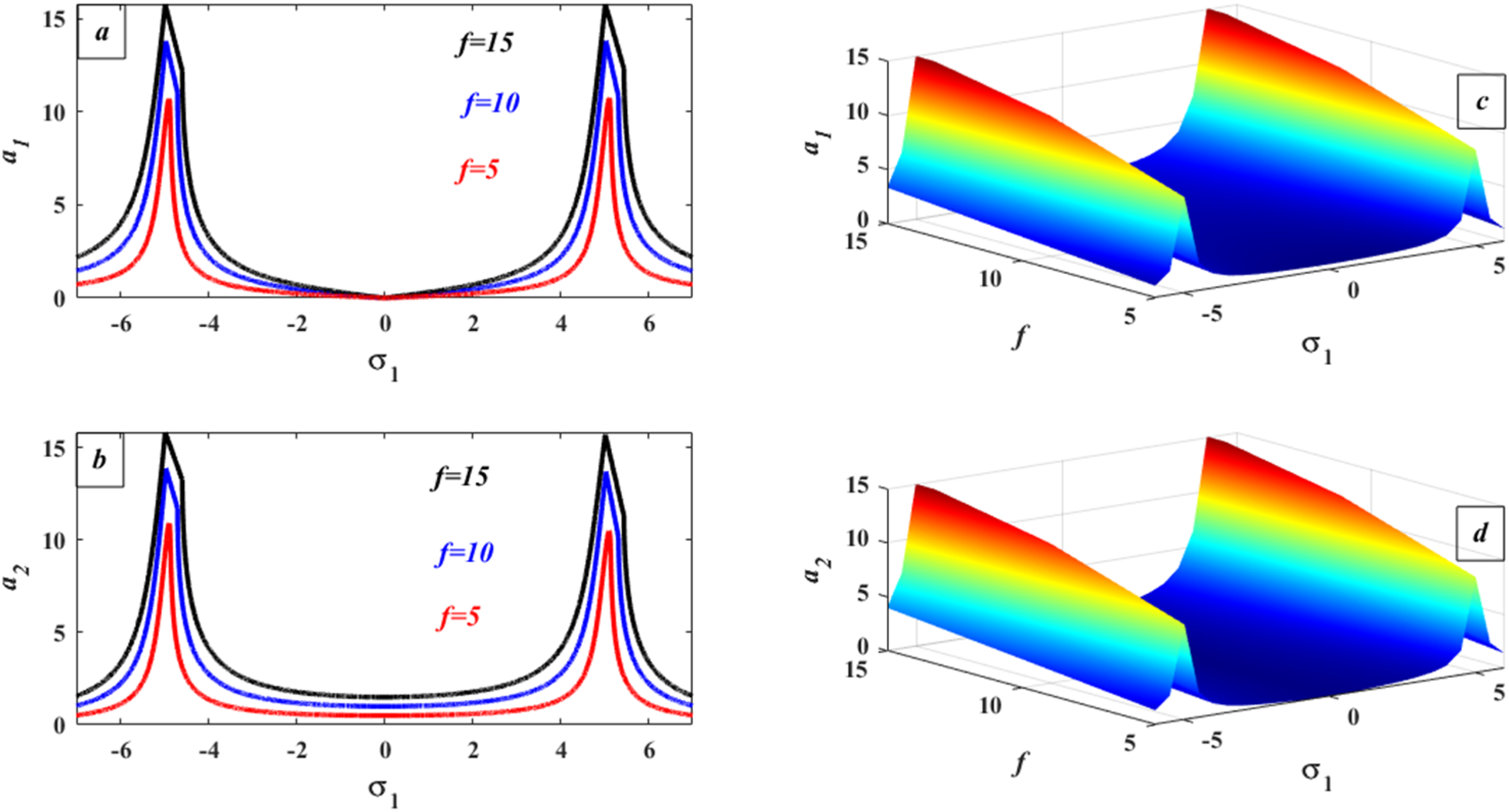
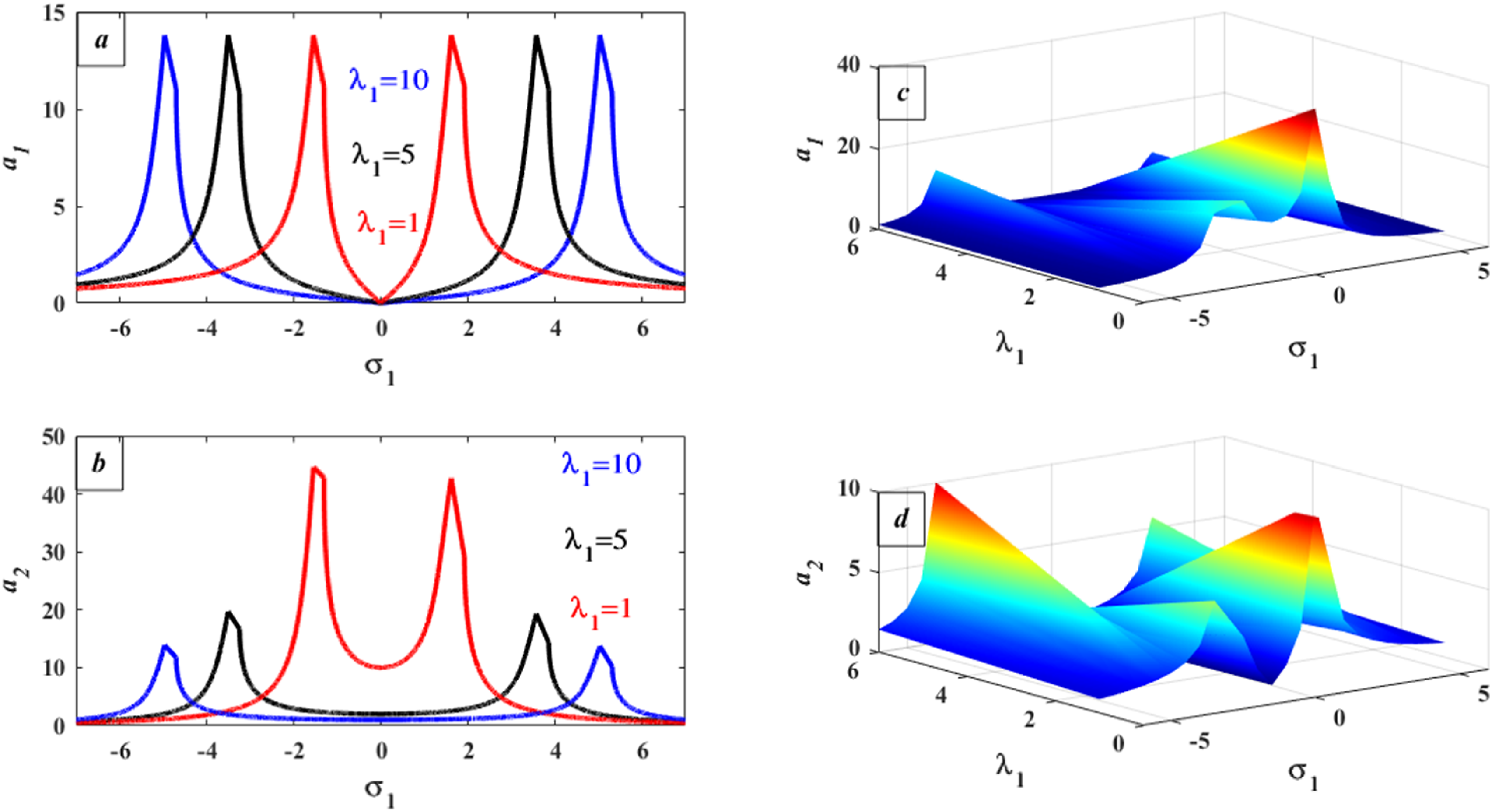
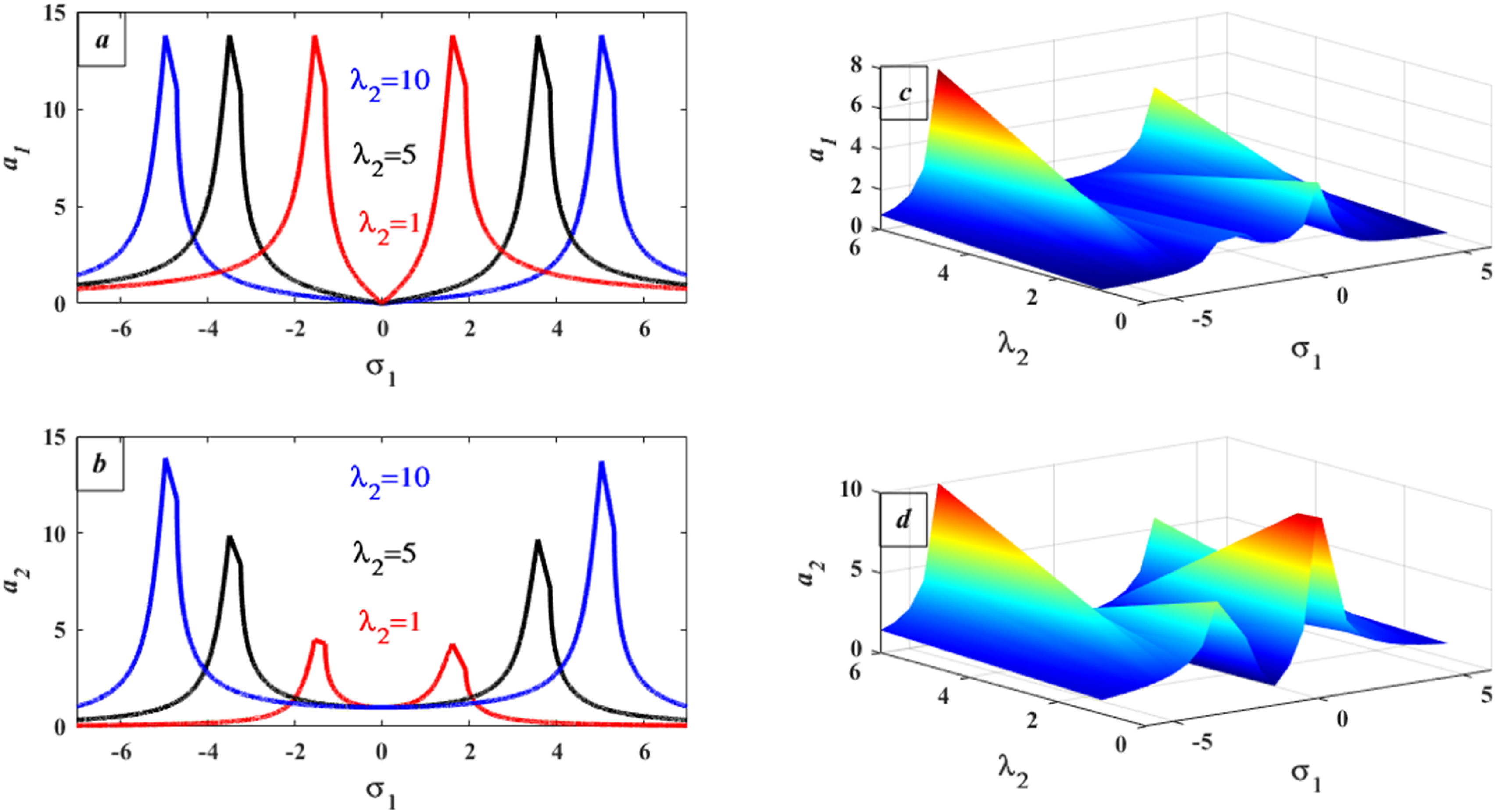
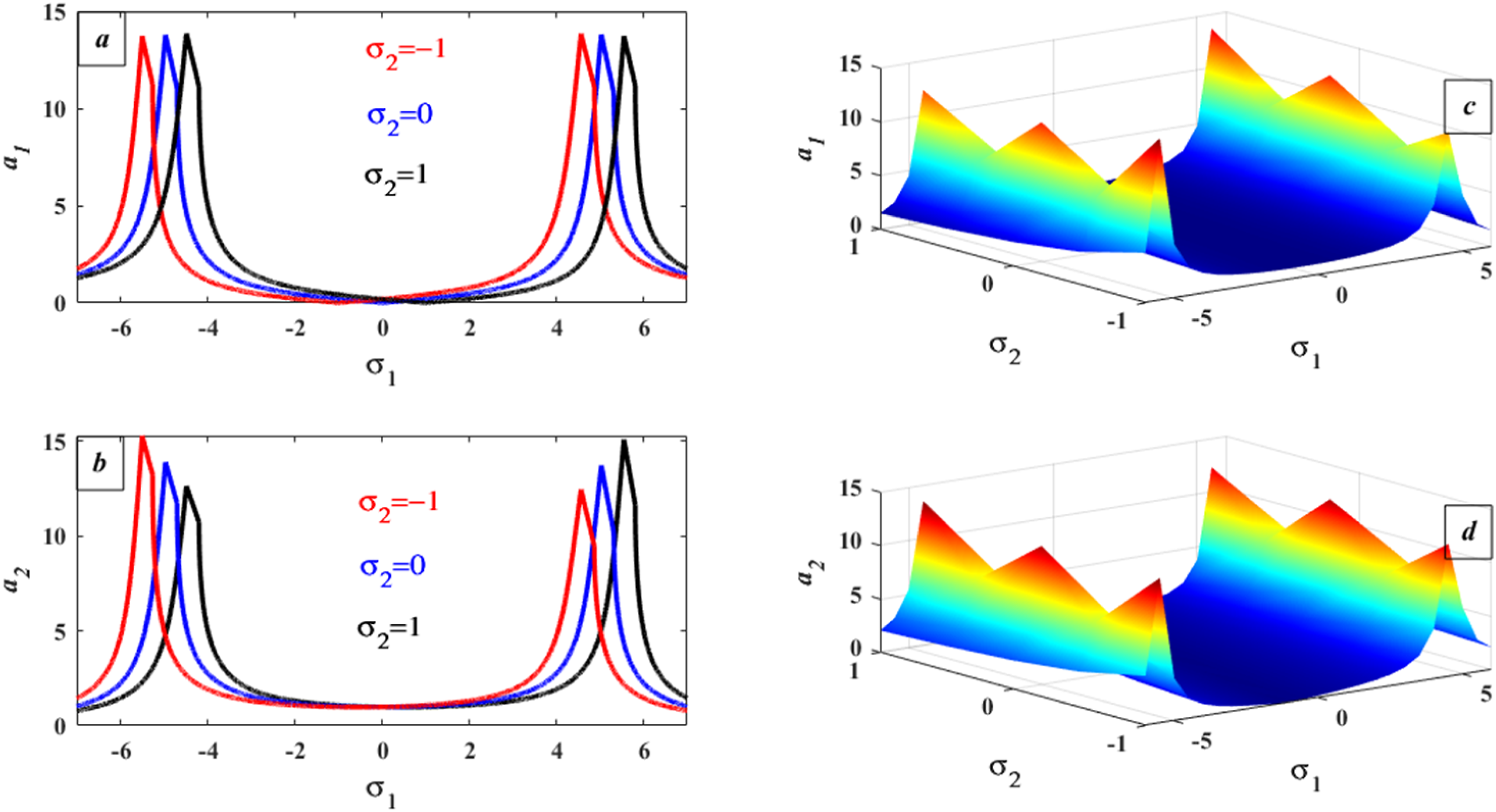
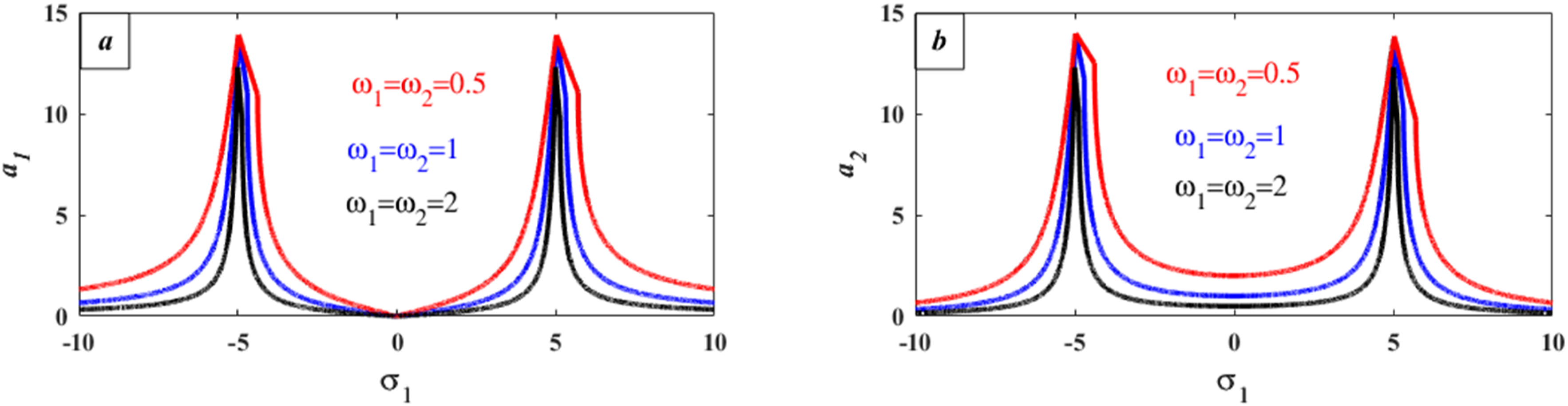
Figures 13 and 14 show that as the system nonlinearity increases The regulated system’s frequency response curves at various controller settings nonlinear parameter coefficient The frequency response curves of the controlled GND mode at distinct values of a detuning parameter The frequency response curves of controlled system at diverse values of natural frequencies 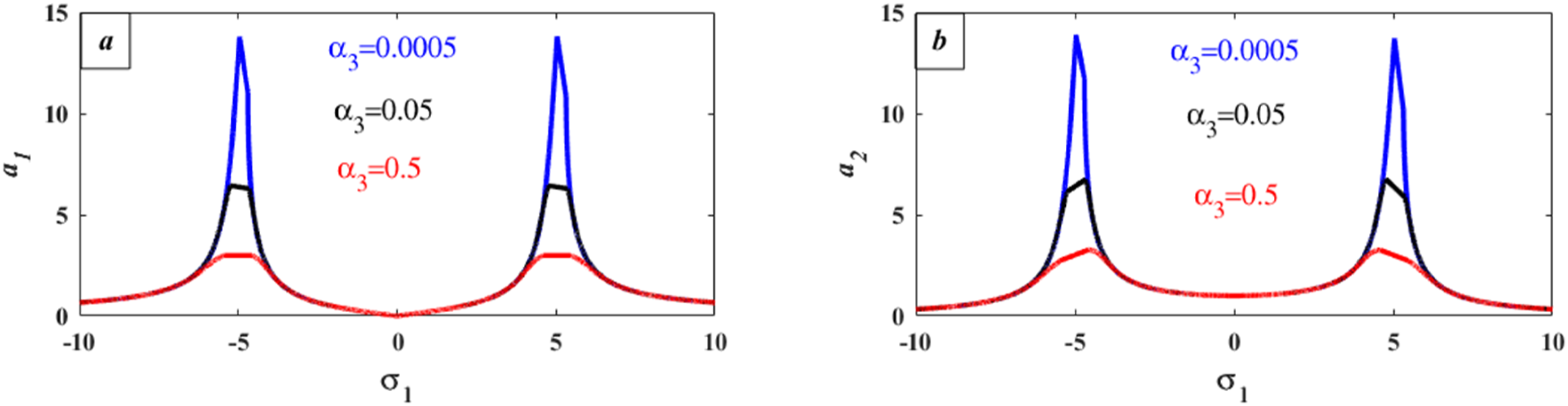
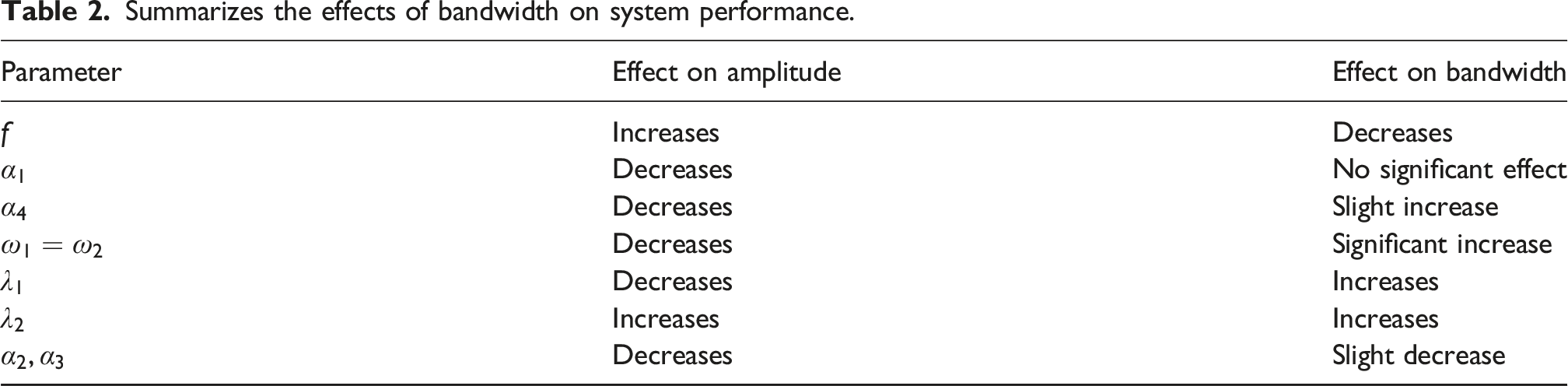
Summary of observations
Summarizes the effects of bandwidth on system performance.
Comparison
Valuation between time histories before and after applying the controller
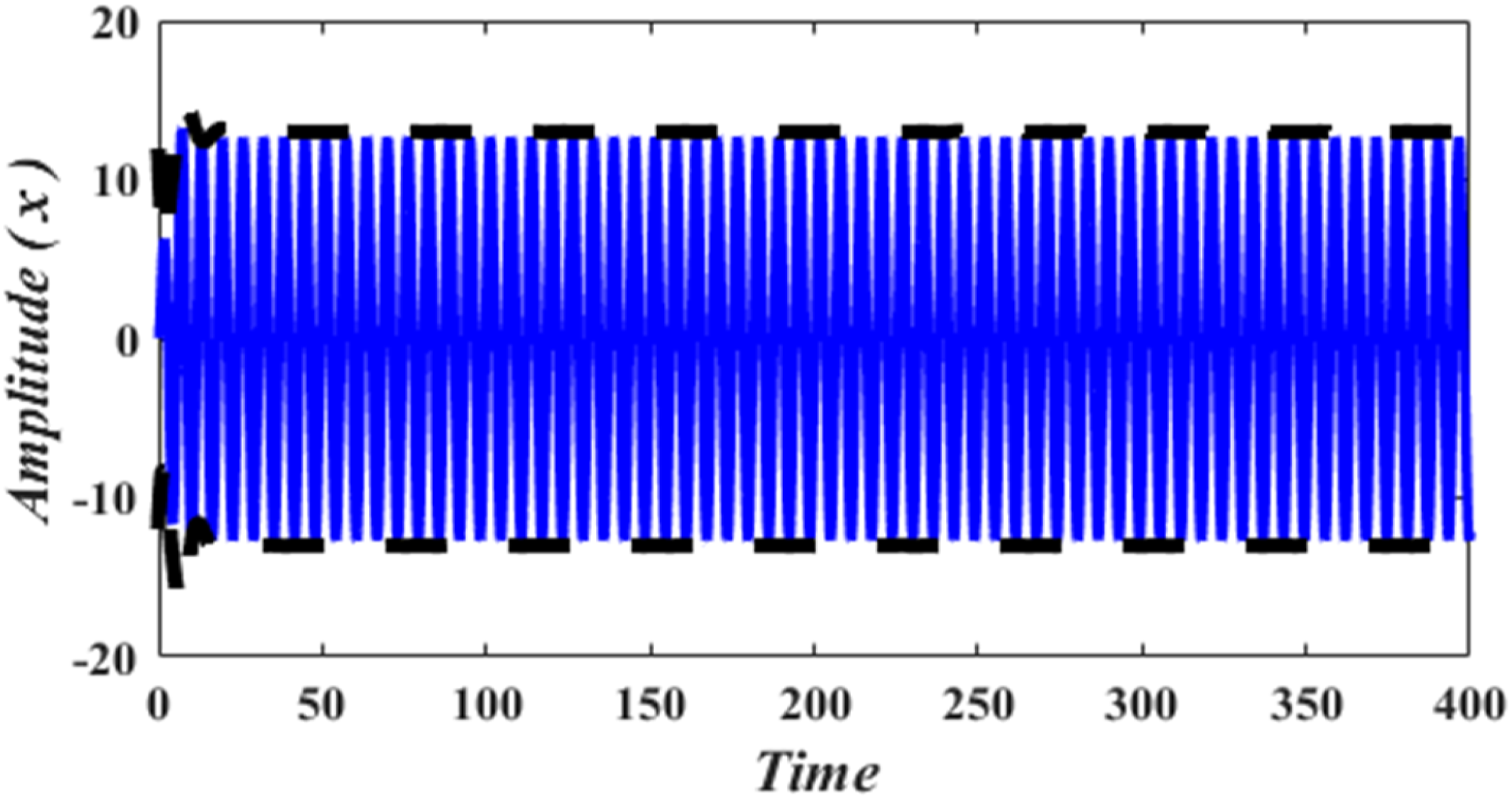
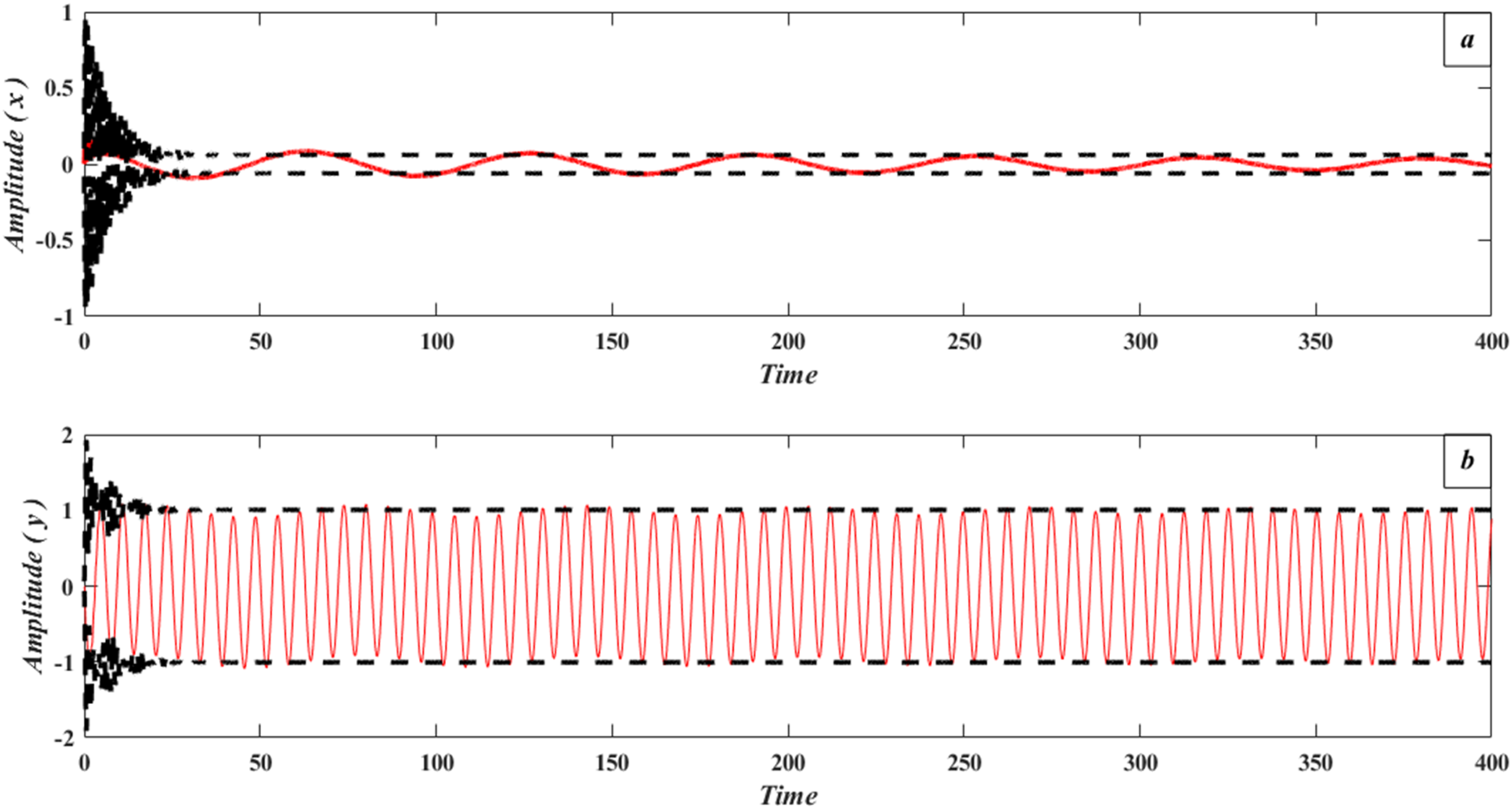
The NDF controller has proven to be the most effective method for reducing the amplitude of the main system, as shown in Figure 15. A comparison of the time histories before and after implementing the controller illustrates the significant improvement achieved. Figure 16 presents a comparison between the numerical solutions (derived from equations (2) and (3)) and the perturbation solutions (based on equations (26) to (29)). In this figure, numerical results are depicted using solid blue lines, while perturbation-based approximations are represented with dashed black lines. The high degree of alignment between the two sets of results confirms a strong agreement, indicating that the perturbation method offers a reliable approximation of the system’s behavior. Furthermore, Figure 17 emphasizes the consistency and accuracy of both methods under the NDF controller. The correlation is particularly strong when the controller is active, which validates the effectiveness of the control strategy. This consistency demonstrates that both numerical and perturbation approaches are capable of accurately capturing the system dynamics, especially under the influence of the NDF control. Comparative analysis of controller performance. Vibration amplitude of the uncontrolled main system. Analyzing and comparing the approximate solution (………) with the numerical solution (ــــــــ).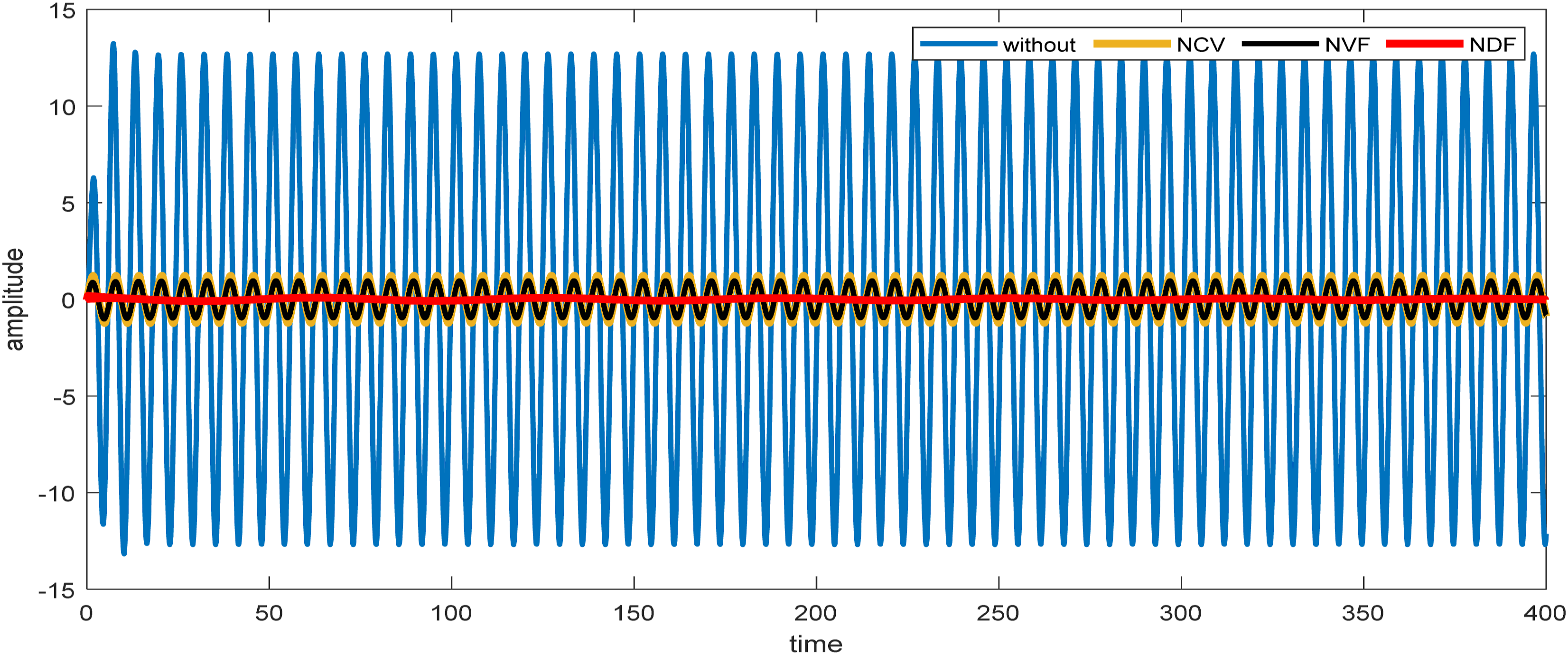
Enhancing vibration control using NES with an NDF controller
Unwanted vibrations pose a significant threat to the performance, stability, and longevity of mechanical systems. In their study, Zhang et al. 9 investigated the use of a Nonlinear Energy Sink (NES) as a method to mitigate such vibrations. The NES functions similarly to a highly specialized shock absorber. It is designed to effectively absorb and dissipate vibrational energy, thereby protecting the main system from instability. Nonlinear Damping and Stiffness Elements: These components are the core of the NES. Unlike conventional dampers and springs, they exhibit nonlinear behavior, which allows for more effective energy absorption—particularly in response to large, sudden excitations. This paper builds upon the traditional NES approach by introducing a Nonlinear Derivative Feedback (NDF) controller. Unlike passive elements, the NDF controller responds to the rate of change in system vibrations, actively applying corrective forces to counteract abrupt dynamic responses. This proactive mechanism enhances the damping capability of the NES. The integration of the NDF controller yielded significant improvements in vibration suppression: The effectiveness factor of the NES system increased dramatically, with values approaching 160, indicating a substantial enhancement over the NES alone. The vibration amplitude was reduced by approximately 99%, underscoring the controller’s impact on overall system stability. To validate these results, both numerical simulations and approximate analytical (perturbation) methods were employed. The strong agreement between the two methods confirms the robustness and reliability of the proposed control strategy. This research highlights the potential of combining smart control algorithms with passive nonlinear devices to achieve superior vibration mitigation. Such hybrid systems offer promising applications in engineering fields where mechanical stability and dynamic performance are critical.
Bifurcation diagram and chaotic response
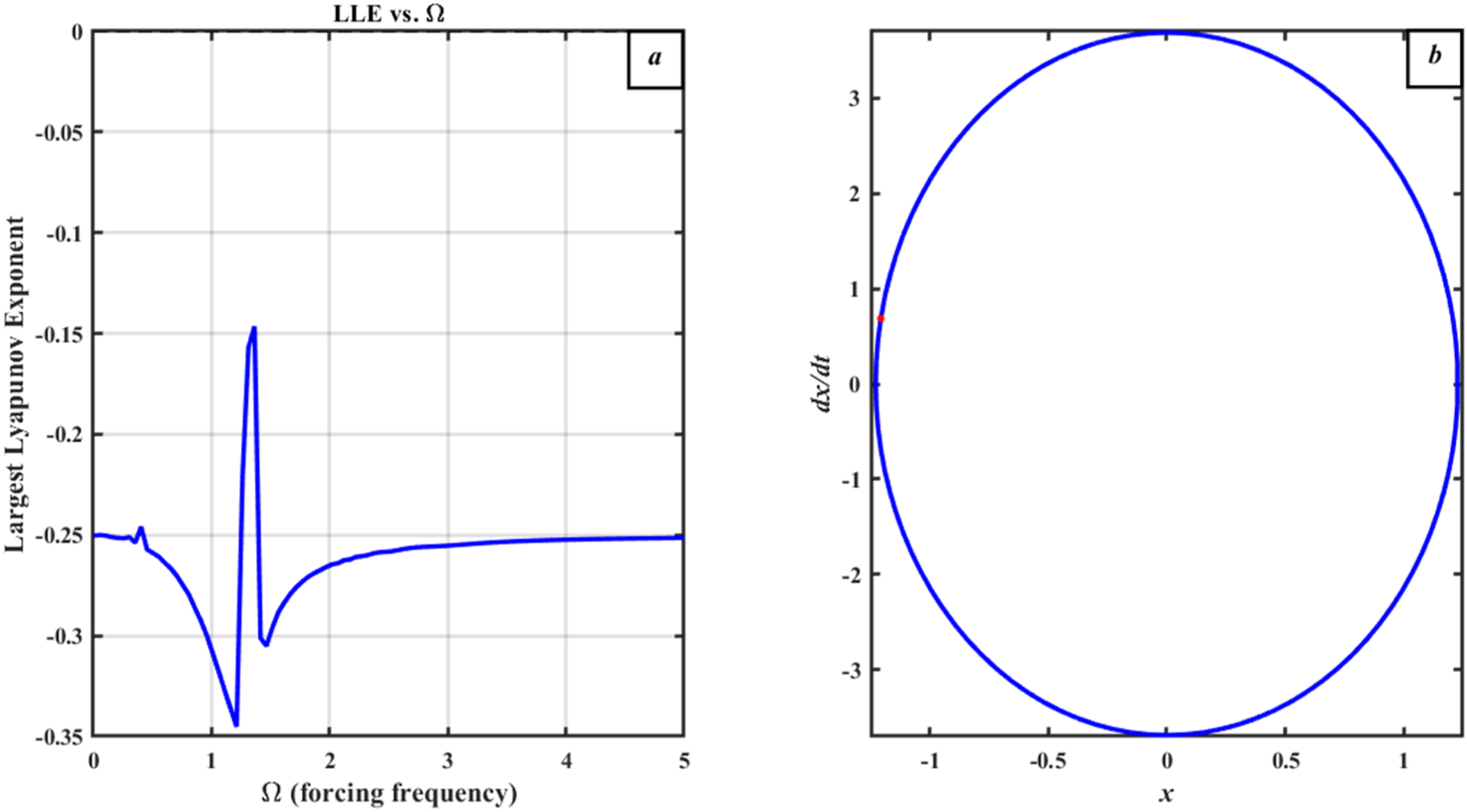
In the bifurcation study, we begin by analyzing the system’s behavior in the absence of control, as shown in Figure 18, which depicts the bifurcation diagram of Bifurcation diagrams of (a) Largest Lyapunov Exponent (b) Phase portraits and Poincaré maps of the periodic state at 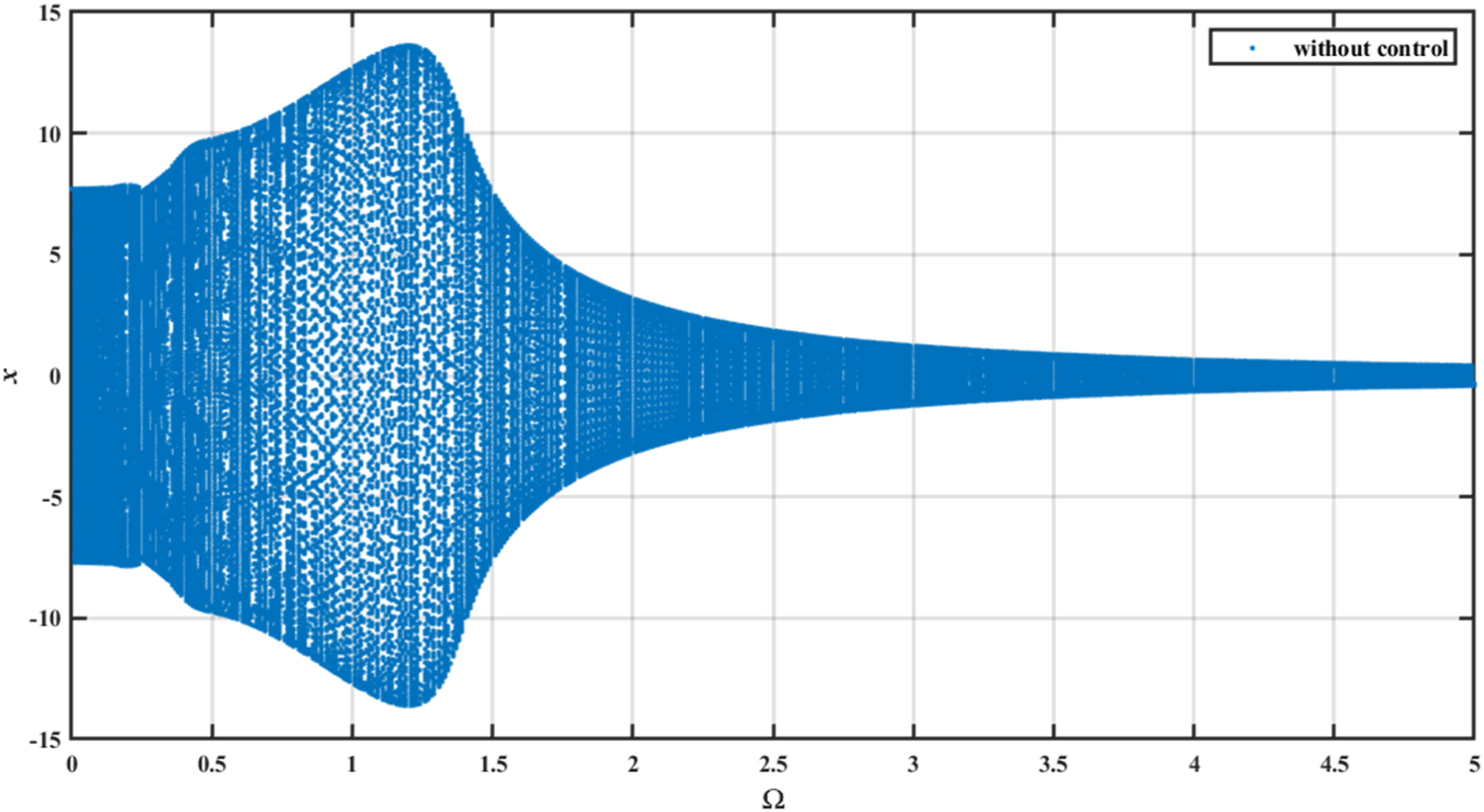
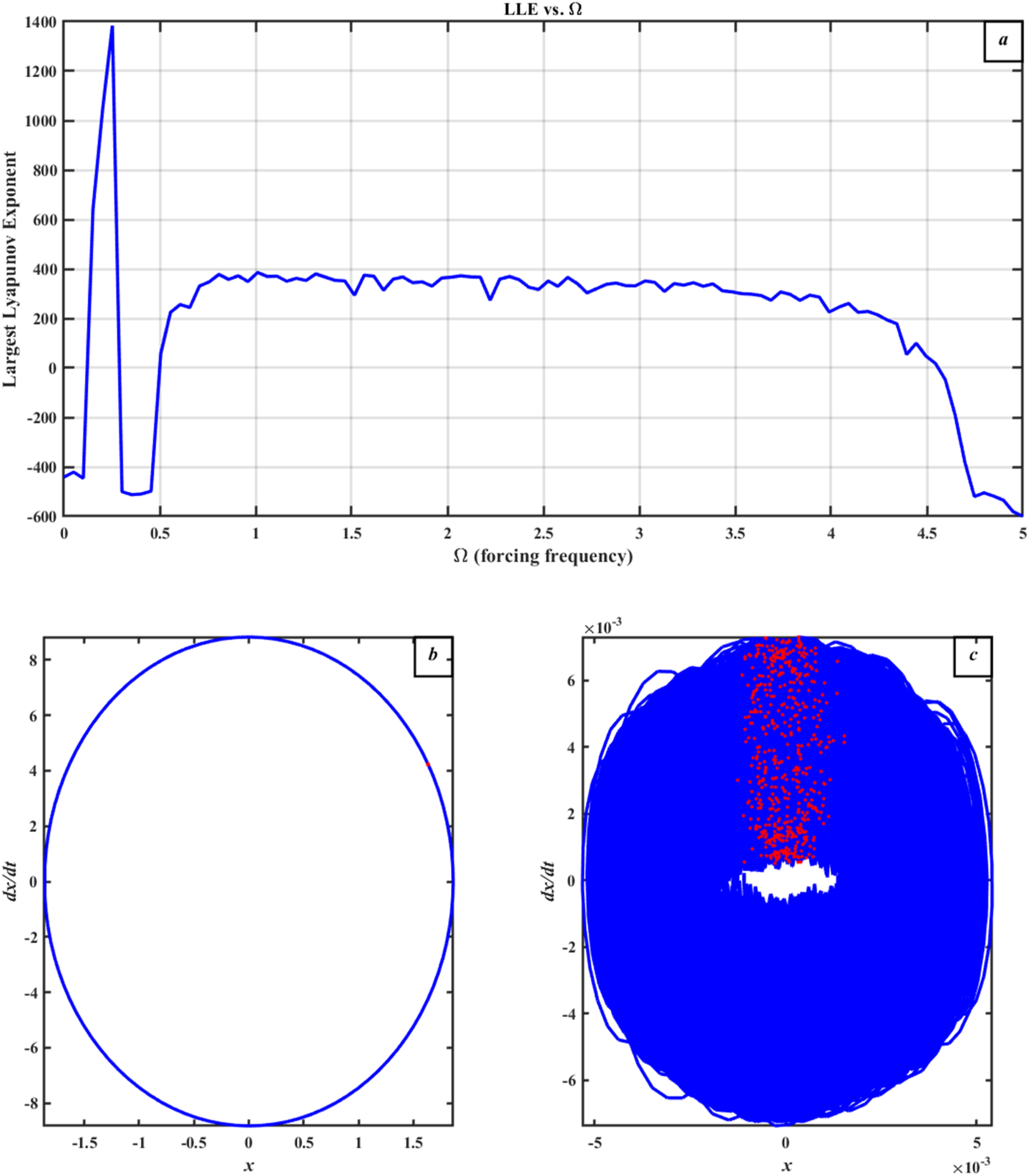
We further examined the behavior of the controlled system using bifurcation analysis with control gains set to Bifurcation diagrams of (a)Largest Lyapunov Exponent with NDF controller at 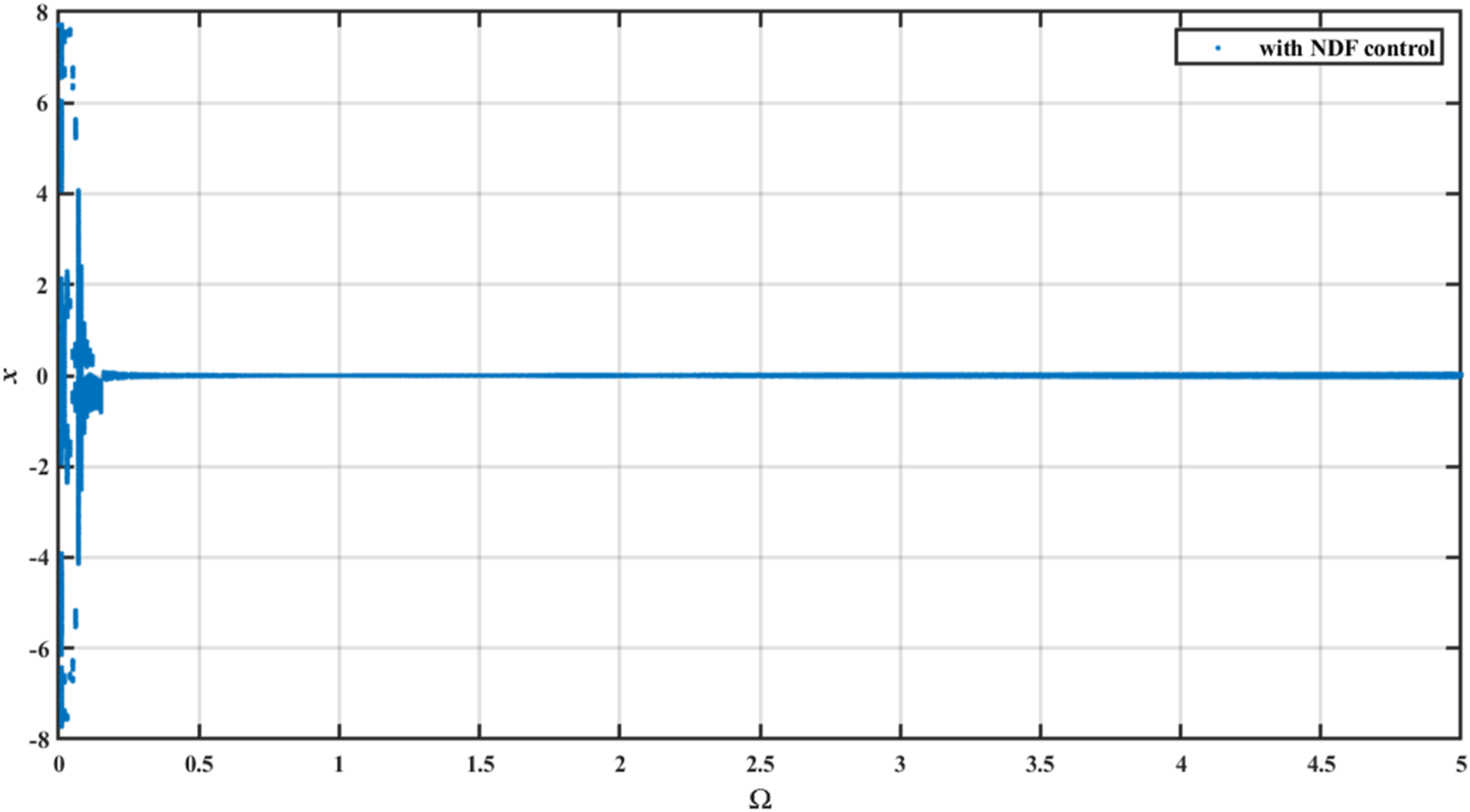
Conclusion
In this article, GND has been studied about the simultaneous resonance case under the effect of external force. The GND’s vibrations were suppressed via NDF controller. The approximate solutions of the closed loop have been obtained by applying the average method. For clarifying the effect of the NDF controller, we plotted the GND system and NDF controller amplitudes through the detuning parameter for every parameter at the chosen resonance situation. From our results of this article, we have concluded some remarks. • This study has demonstrated the effectiveness of a modified (NDF) controller in enhancing the vibration suppression capabilities of a Ground-mounted Dynamic (GND) system. The controller exhibited a high efficiency, with an estimated effectiveness value Ea is about to 160 indicating its strong ability to attenuate system vibrations. • The NDF controller was employed to obtain the closed-loop response of the system’s relative displacement. The results revealed substantial improvements in performance metrics, including a marked reduction in peak overshoot and settling time. These improvements confirm the controller’s suitability for precision vibration control applications. • For optimal performance, the NDF controller must be properly tuned. Specifically, its natural frequency • Furthermore, increases in the magnitude of the external force • Overall, the findings confirm that the modified NDF controller is a robust and efficient solution for improving dynamic performance and suppressing unwanted vibrations in GND systems.
Future work
Applying some different approximate methods like the harmonic method, given the challenges of traditional control methods, we will explore the effectiveness of fractional-order feedback control for suppressing vibrations in the nonlinear dynamical system. Applying some different numerical methods like spectral method. Make comparisons between theoretical research and experimental results. Make simulation models.
Footnotes
Acknowledgments
The authors extend their appreciation to the Deanship of Scientific Research at Northern Border University, Arar, KSA for funding this research work through the project number “NBU-FFR-2025-912-05.″
Author contributions
A.T. EL-Sayed: Methodology, Software, Validation, and Writing—original draft. Asma Alanazy: Investigation, Data curation, Writing—original draft. Y. A. Amer: Conceptualization, Methodology, Software. M. A. EL-Sayed: Software and Validation, Data curation, and Writing—original draft.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was funded by the Researchers Supporting Project number (NBU-FFR-2025-912-05), Northern Border University, Arar, Saudi Arabia.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data Availability Statement
All data generated or analyzed during this study are included in this published article.
Appendix A