
Abstract
The high-static-low-dynamic-stiffness (HSLDS) isolator is sensitive to mass deviation, which causes a shift in static equilibrium and results in softening of the dynamic response. This study introduces sliding mass inertia (SMI) to an HSLDS to mitigate the softening and enhance the dynamic performance of the system under mass deviation. The harmonic balance method (HBM) is employed to obtain the dynamic response of the vibrating system with the proposed nonlinear isolator. Key characteristics, such as the backbone curve, amplitude-frequency response, resonance peak, and displacement transmissibility are analyzed in detail through parametric analysis. The results indicate that mass deviation worsens the softening behavior of the HSLDS isolator. A higher mass deviation ratio results in an increase in both the amplitude and the resonance frequency of the system. Fortunately, however, the sliding mass eliminates the softening behavior, reduces the peak response, and improves the overall dynamic performance.
Keywords
Introduction
Nonlinear vibration isolators have garnered significant attention due to their superior isolation performance compared to linear isolators. They excel in providing very low isolation frequencies while maintaining excellent load-bearing capabilities. Ibrahim provided a comprehensive review on nonlinear vibration isolators, highlighting numerous mechanisms employing negative stiffness that result in ultra–low-frequency isolation. 1 Carrela et al. performed an extensive examination on the static characteristics of a quasi-zero-stiffness (QZS) isolator, comprising three oblique springs. 2 They introduced the notion of high-static-low-dynamic-stiffness (HSLDS) isolator 3 and optimized the minimal stiffness range.
Recently, different methods have been employed to achieve HSLDS, such as scissor-like structures, 4 bio-inspired structures, 5 cam-roller-spring mechanisms, 6 origami-inspired structures, 7 cross-ring structures, 8 horizontal springs, 9 Euler buckled beams, 10 and magnetic elements. 11 Advances in nonlinear vibration isolation have increasingly focused on HSLDS and QZS systems due to their ability to extend the isolation range to lower frequencies. Yan et al. reviewed recent progress in nonlinear vibration isolation, highlighting HSLDS and QZS mechanisms for low-frequency applications. 12 Ma et al. discussed QZS isolators, emphasizing negative stiffness mechanisms and the performance of passive and active systems. 13 Zhu et al. explored compact QZS isolators, addressing design approaches and trade-offs between miniaturization and performance. 14 Liu et al. summarized advancements in QZS isolators, demonstrating their advantages over linear systems in low-frequency isolation. 15 Hamzehei et al. reviewed the design of QZS mechanical metamaterials, examining deformation mechanisms such as stiffness elements and origami-inspired structures for passive vibration isolation. 16
Recent studies on nonlinear systems provide powerful tools for analyzing stiffness asymmetry and mass variation effects in vibration isolation systems. Baleanu et al. used fractional variational principles to model asymmetric oscillators with quadratic nonlinearity and memory effects. 17 Florea et al. applied the multi-step differential transformation method (Ms-DTM) to accurately solve stiff pendulum–spring systems, demonstrating strong handling of nonlinearities. 18 Al-Khader et al. developed the Optimal and Modified Homotopy Perturbation Method (OM-HPM) for oscillators with time-dependent mass, improving efficiency and accuracy. 18 Roy et al. extended OM-HPM to pendulums with vibrating supports, capturing parametric excitation and resonance phenomena, 19 and further applied it to highly nonlinear oscillators such as Duffing and Van der Pol systems, achieving superior convergence and precision. 20
The HSLDS and QZS vibration isolators are effective in providing low-frequency vibration isolation, but they may demonstrate hardening stiffness in specific scenarios, which can reduce isolation effectiveness. One approach to mitigate this problem is the addition of inertia to an HSLDS isolator.21,22
In the above-mentioned literature, researchers primarily concentrated on examining isolation systems under rated mass where the minimum stiffness aligns with the static equilibrium position. Nevertheless, achieving perfect balance at the desired equilibrium point is challenging in real-world scenarios due to mass variation, namely, the deviation of the actual mass of a system from its intended or rated value. Overload or underload conditions shift the system to a new static equilibrium position. This shift alters the dynamic stiffness, making it asymmetric and resulting in an overall asymmetric dynamic system. Several researchers tried to address this issue by examining the dynamic behaviors of certain HSLDS isolators for a mistuned mass. These studies revealed that the isolation performance deteriorated, but remains superior to that of a linear isolator when subjected to base or force excitations.23–26 Through these studies, the effect of mass deviation on the dynamic response of the isolators is explored, and many useful conclusions are drawn.
To reduce or eliminate the performance degradation of an HSLDS isolator under mass deviation, the present research investigates the potential of a novel nonlinear isolator. The proposed isolator, developed by the authors and referred to as the HSLDS-SMI isolator, 21 combines an HSLDS isolator with sliding mass inertia (SMI). The HSLDS characteristic is obtained using a negative stiffness structure, whereas the inertia is obtained through the sliding motion of the secondary masses. The dynamic equation of motion of the HSLDS-SMI isolation system under mass deviation is derived using the Lagrange equation. The harmonic balance method (HBM) is then utilized to obtain the dynamic response of the vibration system under harmonic excitation, and the backbone curve of the system is examined. The isolation performance in terms of displacement transmissibility is obtained and studied for different system parameters.
The remainder of this paper is organized as follows. In Section 2, the design and construction of the proposed isolator are introduced, and the dynamic equation of a vibrating system with the HSLDS-SMI isolator and mass deviation is derived. In Section 3, the dynamic response is obtained using the harmonic balance method (HBM), and the backbone curve is examined in detail. The amplitude-frequency response and peak response under overload and underload conditions are analyzed in Sections 4 and 5, respectively. In Section 6, the isolation performance of the proposed isolator is studied in terms of displacement transmissibility under both overload and underload conditions. Section 7 provides the conclusions.
The HSLDS-SMI isolator with mass deviation and its modeling
This section presents the design of the HSLDS-SMI isolator and establishes the dynamic model for a system with a nonlinear isolator and mass deviation.
Vibration system with an HSLDS-SMI isolator
The HSLDS-SMI isolator considered in this study is constructed by adding two sliding masses to an HSLDS isolator, as illustrated in Figure 1. The HSLDS-SMI isolator comprises top and bottom plates, connecting rods, two sliding masses, two vertical springs, and two horizontal springs with the same stiffness and pre-compression. The combination of pre-compressed horizontal springs and connecting rods generates negative stiffness in the vertical direction. Two sliding masses are symmetrically incorporated into the top plate using inclined connecting rods. The mass and installation angle of these sliding masses can be adjusted to optimize vibration isolation performance. This study assumes the sliding masses are equal and symmetrically positioned to maintain balanced inertial forces, avoid the generation of net moments, and ensure a stable and predictable response. Asymmetric or unequal configurations are undesirable, as they can introduce rotational dynamics, modeling complexities, and destabilizing effects that compromise the isolation performance. The HSLDS-SMI isolator at static equilibrium position with rated mass.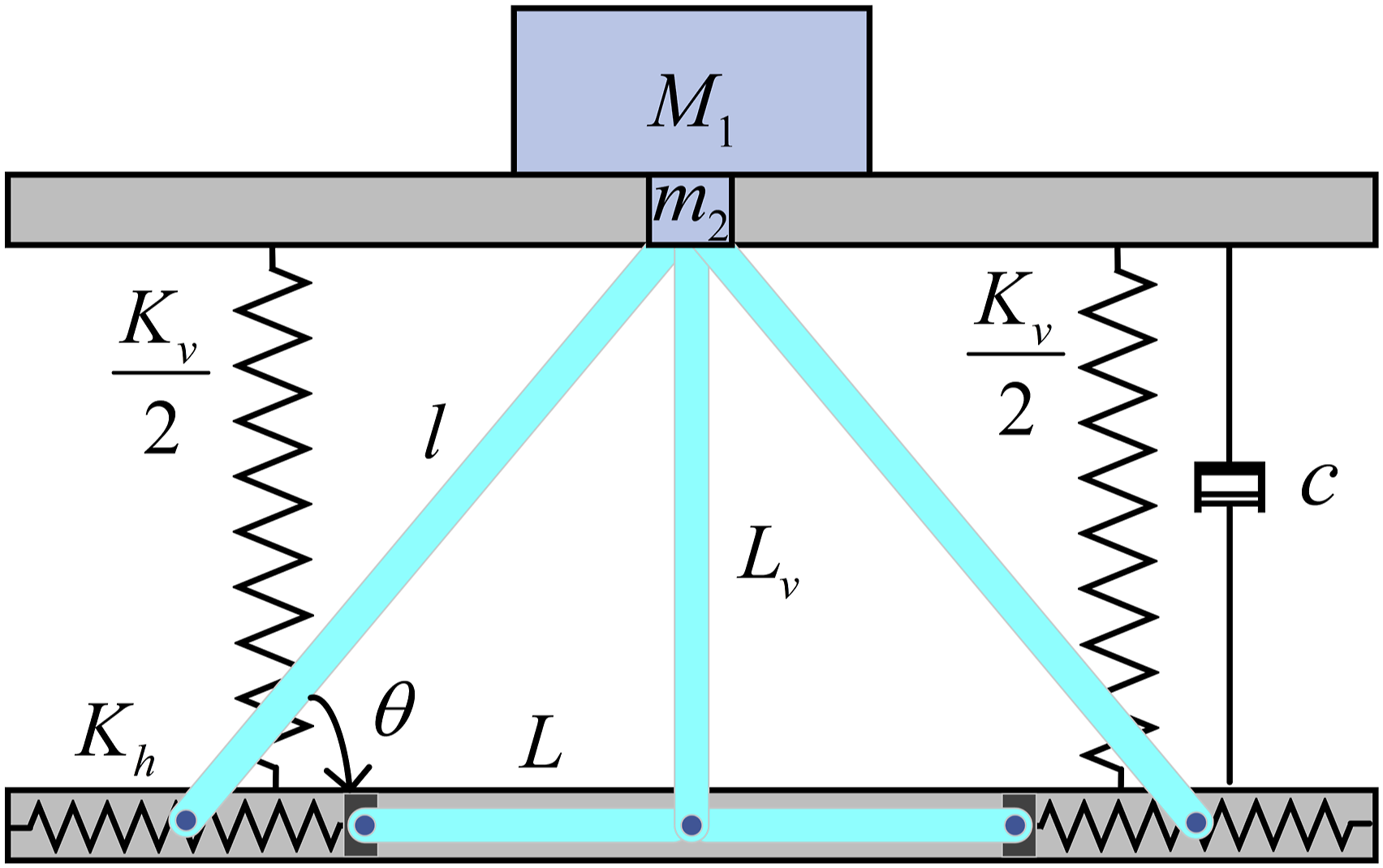
To focus on the dominant dynamic behavior governed by the primary and sliding masses, it is assumed that the sliding and rotational joints are frictionless, whereas the connecting rods and the top and bottom plates are rigid and massless. In practical applications, the mass of these components is usually much smaller than that of the primary mass. Furthermore, the mass of the top plate is usually included in the primary mass, as it moves together with the supported object. The same treatment applies to the bottom plate, since it is often rigidly integrated with the base supporting structure. The mass of the connecting rods is very small, less than one percent of the primary mass, and has a negligible effect on the vibration isolation performance. Therefore, no separate mass is defined in the model for these components.
Under the application of a rated mass, the HSLDS-SMI isolator attains static equilibrium, with the lower connecting rods becoming horizontal, as depicted in Figure 1. The positive stiffness of the vertical springs is offset by the negative stiffness, producing the desired characteristic behavior of the HSLDS. When there is a deviation in the supported mass from the rated mass intended for HSLDS-SMI, the isolator can encounter overload or underload scenarios. Consequently, the static equilibrium position of the isolator shifts away from the ideal static equilibrium location, as shown in Figure 2. This results in the minimum stiffness of the isolator, which is no longer aligning with the static equilibrium location, leading to an asymmetric stiffness/force-displacement curve around the new static equilibrium location. The HSLDS-SMI isolator at (a) overload and (b) underload conditions.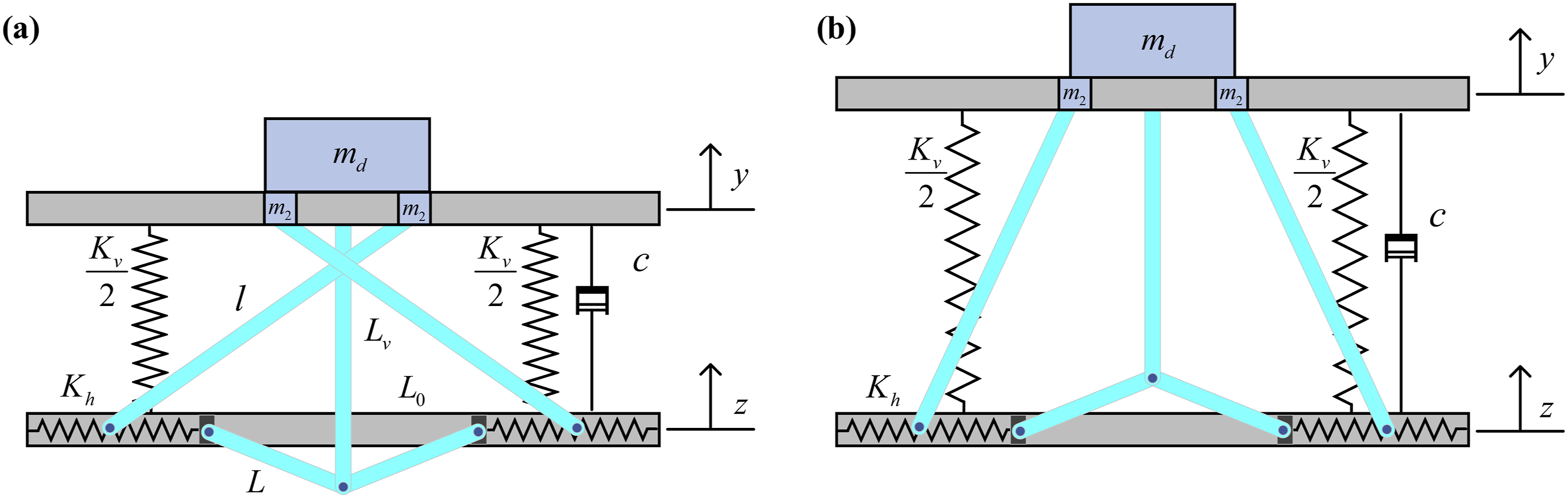
Under the shifted equilibrium condition caused by mass deviation from the rated mass, the stiffness of the isolator becomes asymmetric with a net positive value. This asymmetry in the stiffness/force-displacement curve is heavily influenced by the load condition, as shown in Figure 3, and further discussed in our previous work.
27
Consequently, subsequent analysis is conducted in this work to thoroughly examine how this mass deviation impacts the dynamic response of the HSLDS-SMI isolator. Dimensionless (a) stiffness and (b) force-displacement curve: “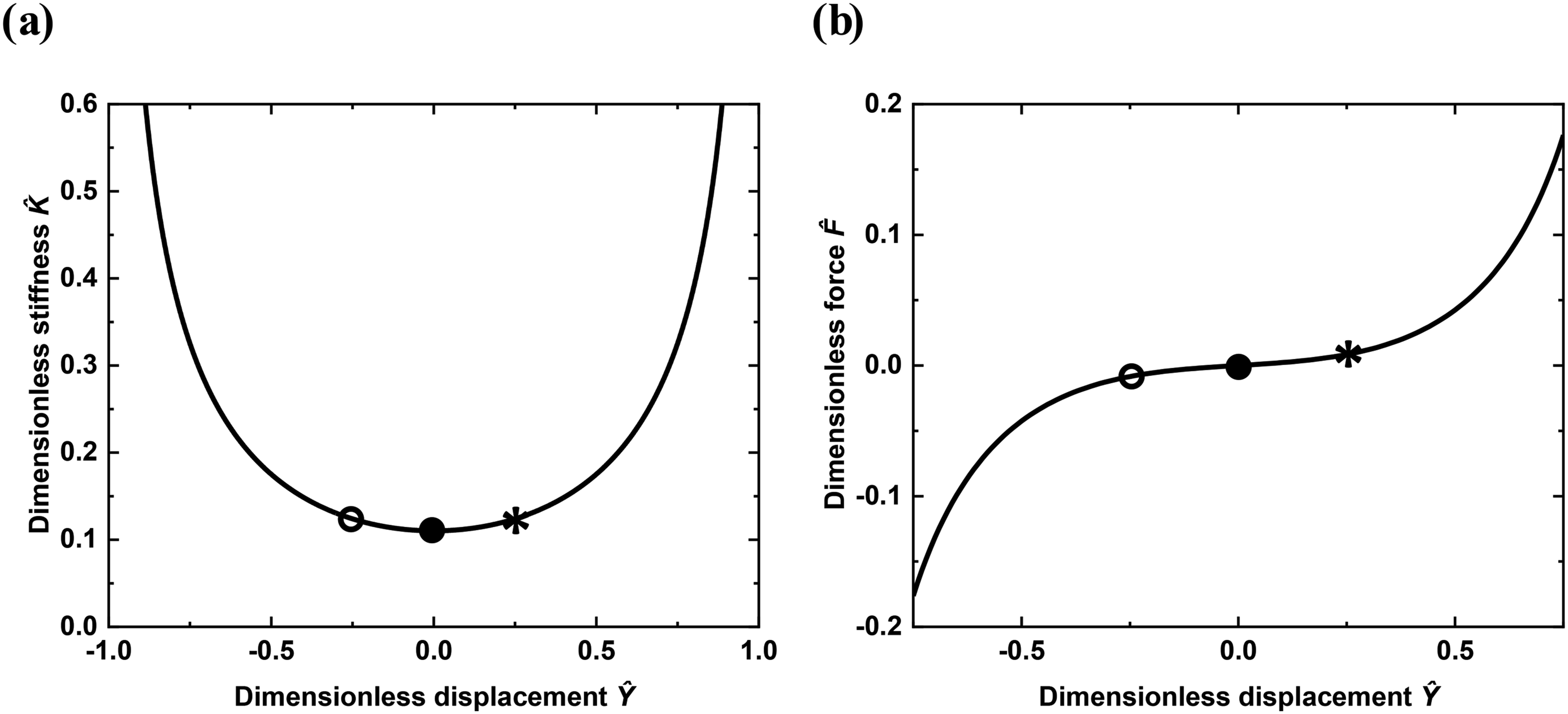
System modeling
When the isolation mass deviates from the intended mass, the mass is denoted as



Using the Lagrange equation

The dynamic equation of motion can be obtained as

The dimensionless dynamic equation of motion for the isolation system can be rewritten as


Using polynomial forms to represent the fractional and radical expressions in the equation of motion can greatly facilitate subsequent dynamic analysis. This simplification is accomplished through the application of the Taylor series expansion, resulting in the following reduced equation of motion

Such a treatment has been proven to be appropriate in previous work. 27
Steady-state harmonic response
Solution by the harmonic balance method
The equation of motion can be solved using the harmonic balance method (HBM). Assuming the solution has the form

The base excitation has the form

By substituting equations (8) and (9) into equation (7) and setting the constant terms and coefficients of the




The trend and the peak amplitude values of the amplitude-frequency curve, along with the corresponding resonance frequencies, can be predicted using the backbone curve.
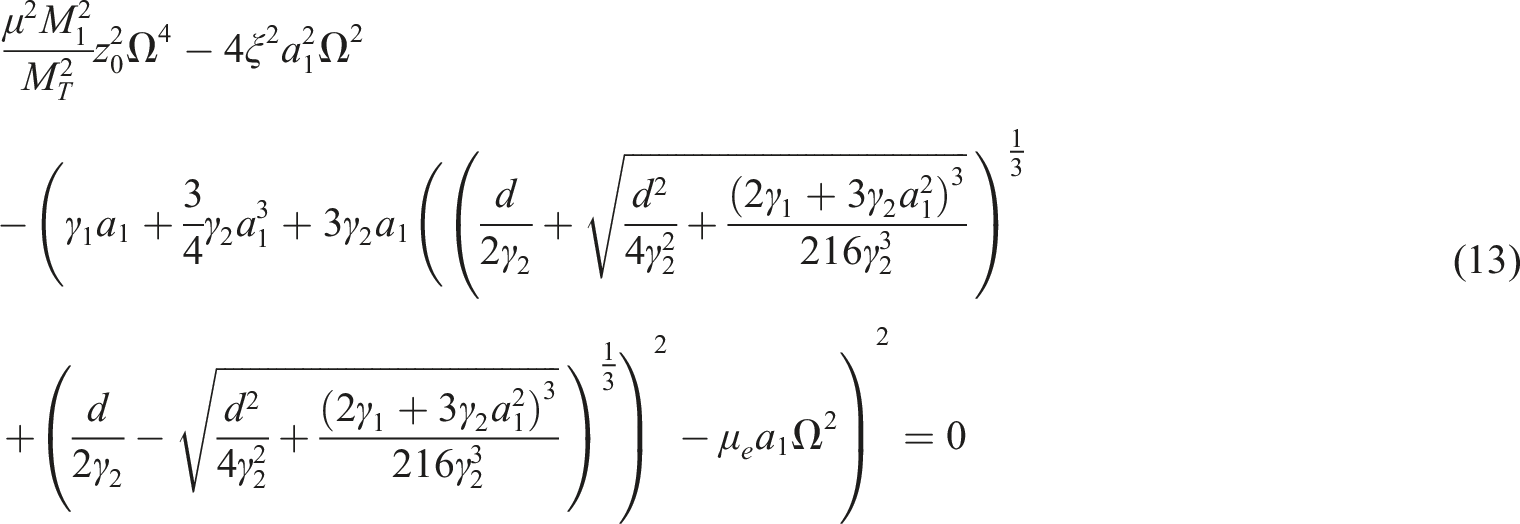
The equations for the backbone curve, expressed in terms of the harmonic amplitude term

Backbone curve
Figures 4 and 5 depict the backbone curve of the HSLDS-SMI vibration isolator under Backbone curve for different Backbone curve for varying 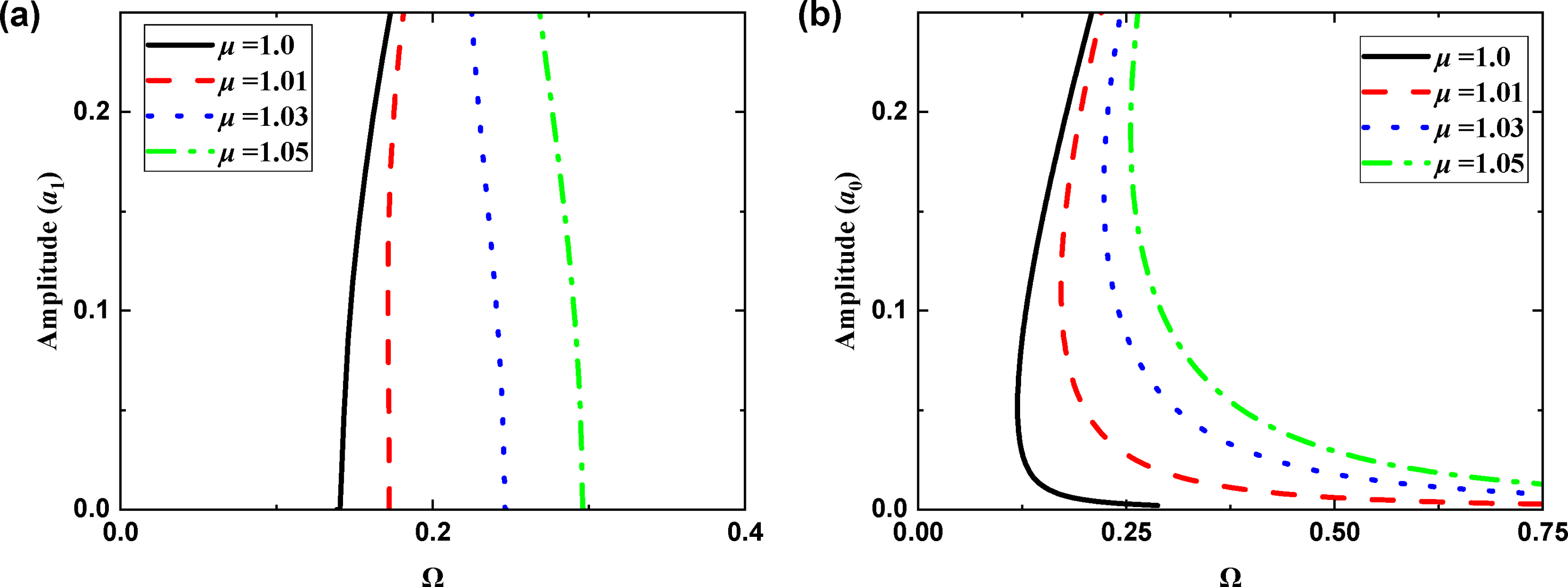
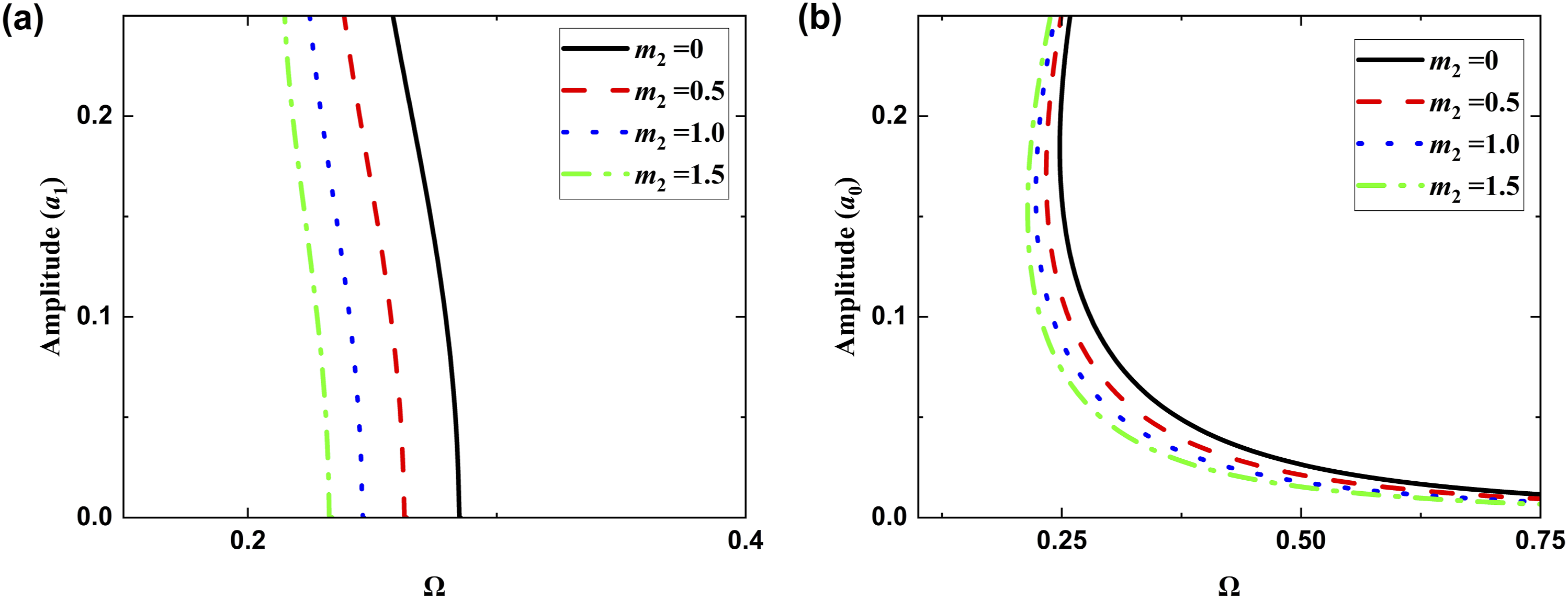
The backbone curves of the harmonic amplitude
Regarding the constant amplitude term
The backbone curves of the harmonic amplitude
Analysis on the amplitude-frequency response
Under overload conditions
Figures 6 and 7 illustrate the amplitude-frequency responses of Amplitude-frequency response under overload for different Amplitude-frequency response under overload for varying 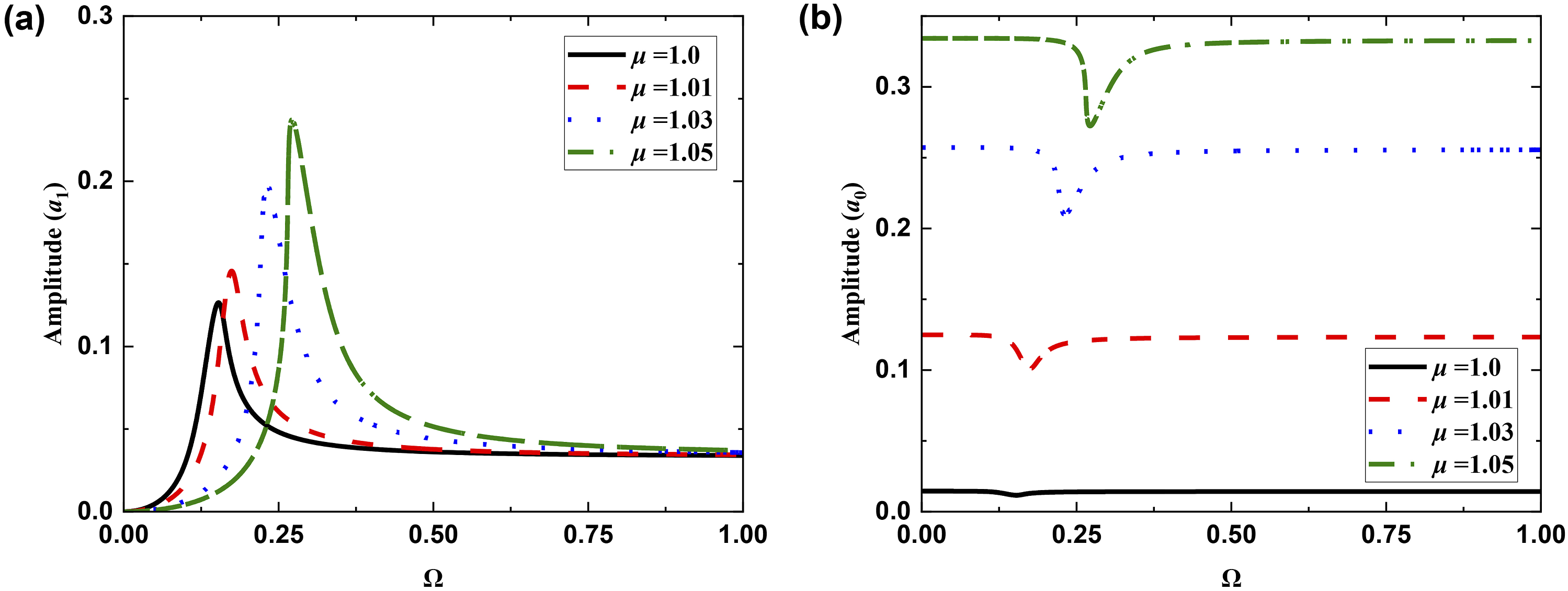
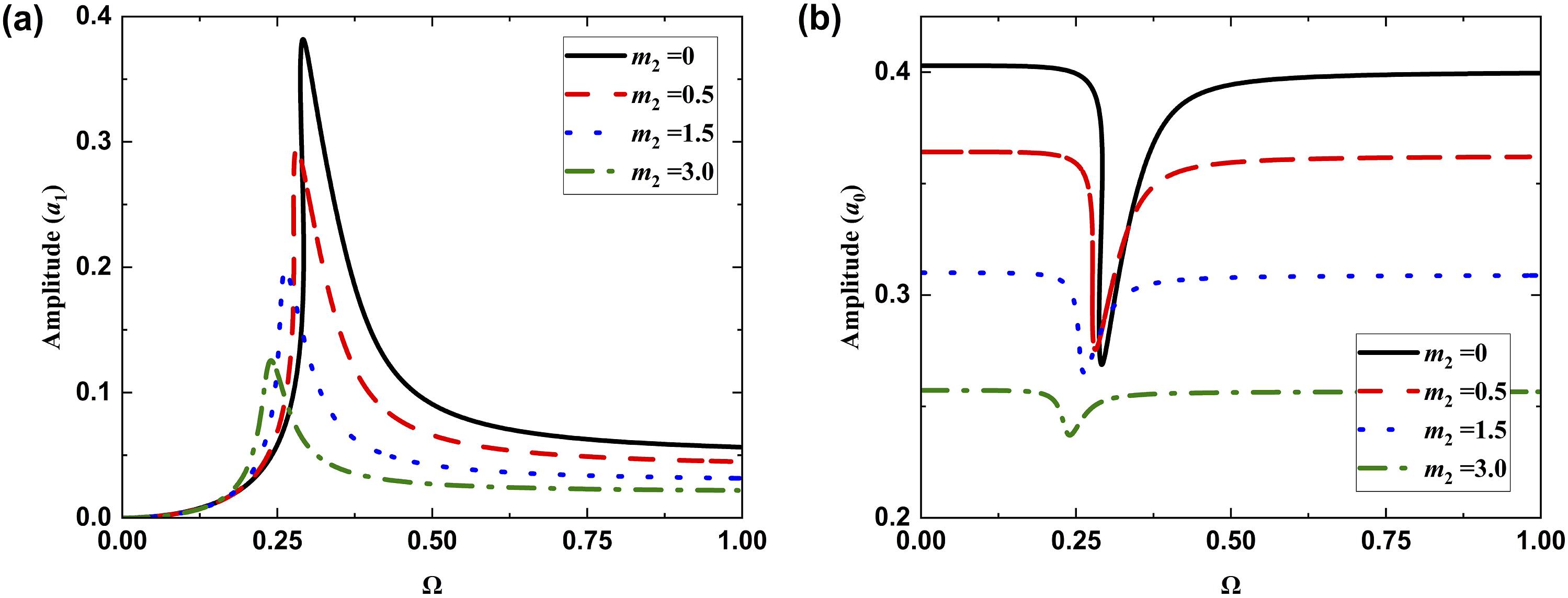
Under the condition of rated mass, the harmonic term behaves as expected under normal conditions when
The amplitude-frequency curves for varying sliding mass
Under underload conditions
The amplitude-frequency curve of the HSLDS-SMI under the underload condition, compared to the overload condition, is presented in Figure 8 when Amplitude-frequency response under underload and overload for different 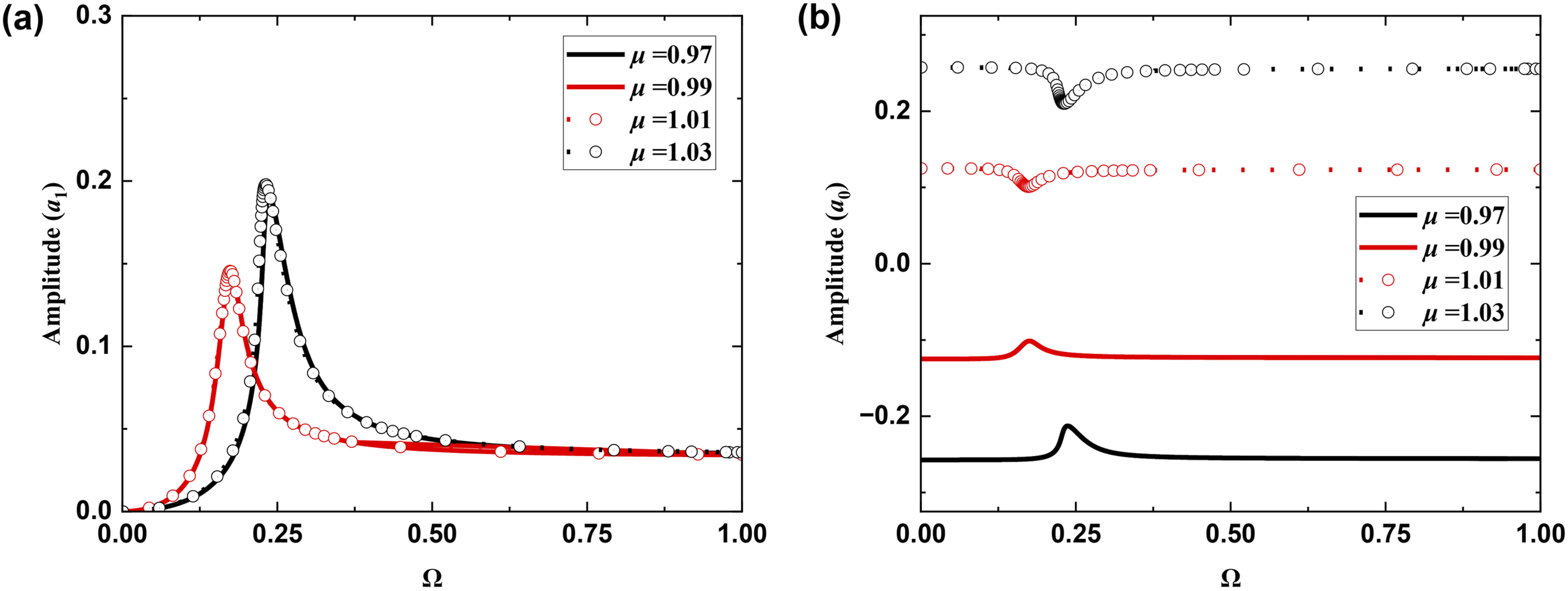
When
The curves depicting the variation in other parameters closely resemble those observed during overload. Consequently, this section does not delve into the amplitude-frequency response under underload conditions.
Peak responses to harmonic excitation
Under overload conditions
The backbone curve, which is the locus of the amplitude-frequency curve, is associated with the resonance frequency and peak of the amplitudes of the harmonic terms

Figure 9(a) and (b) depict the peak value of the harmonic term The curves of the peak 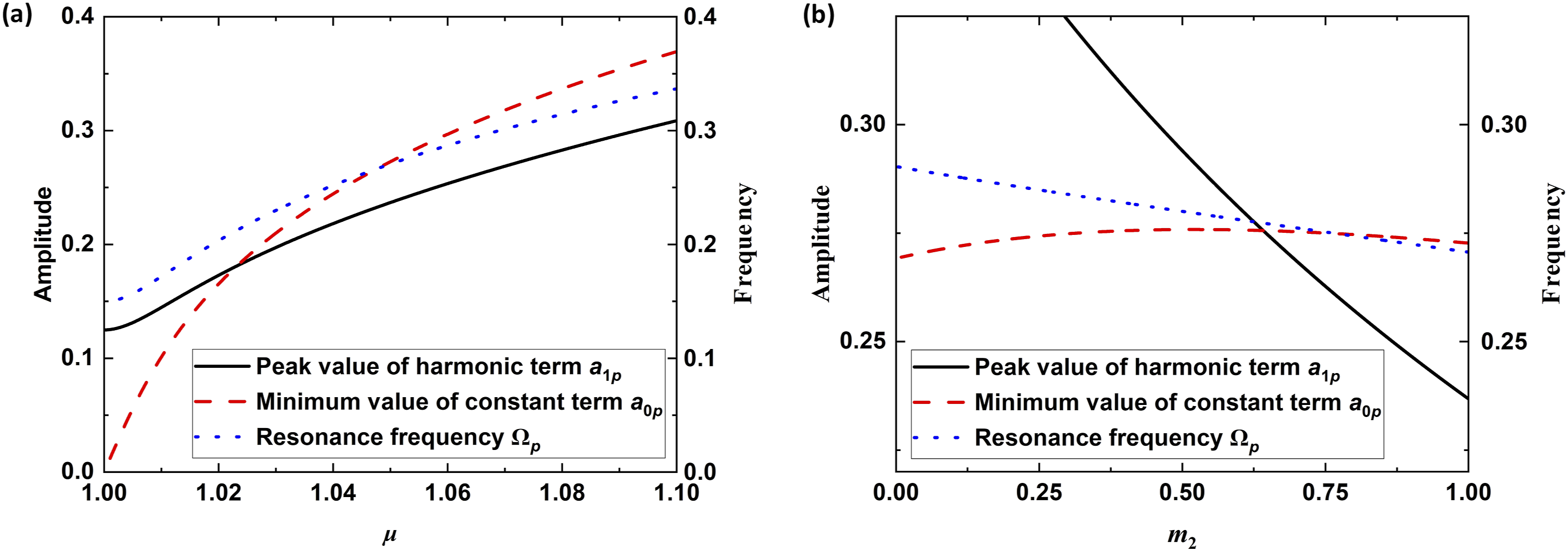
Figure 9(a) illustrates variations in the peak value of
The peak value of
Under underload conditions
Figure 10(a) and (b) show the peak value of the harmonic term The curves of the peak 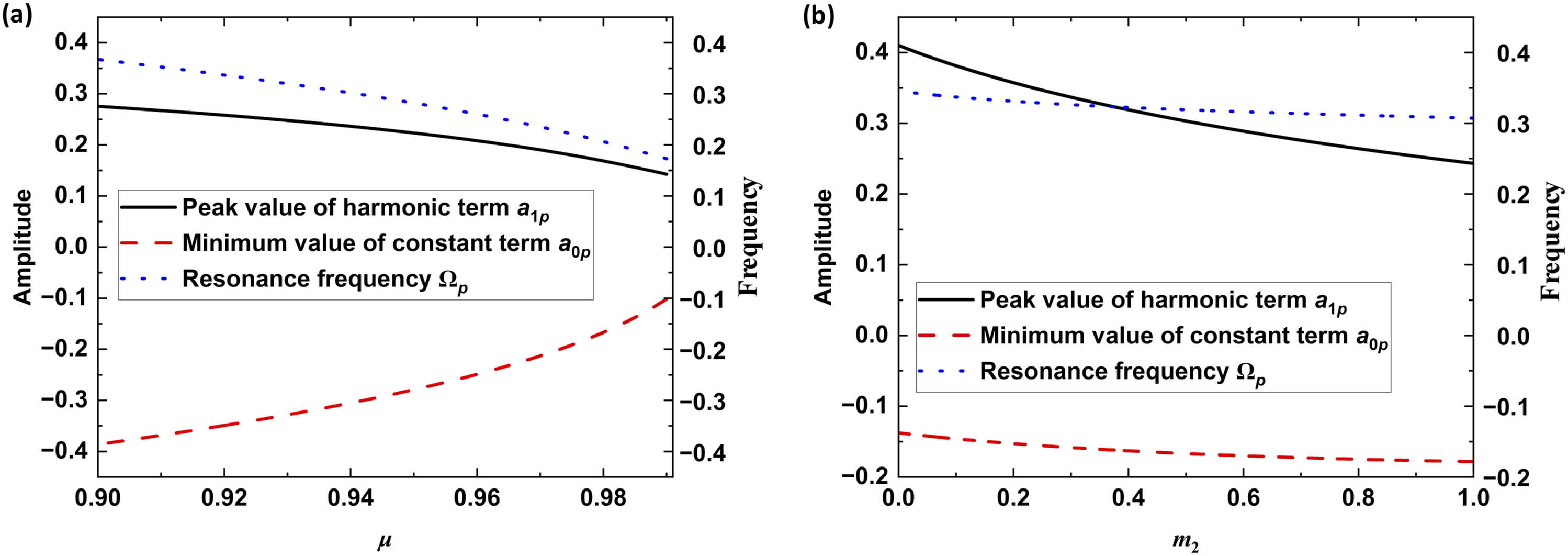
Figure 10(a) depicts the variations in the peak value of
Figure 10(b) shows the changes in the peak value
Displacement transmissibility analysis
When the HSLDS-SMI system is displaced from the ideal static equilibrium position due to mass deviation by a deviation distance


Under overload conditions
Figure 11(a) and (b) depict displacement transmissibility Displacement transmissibility for different (a) 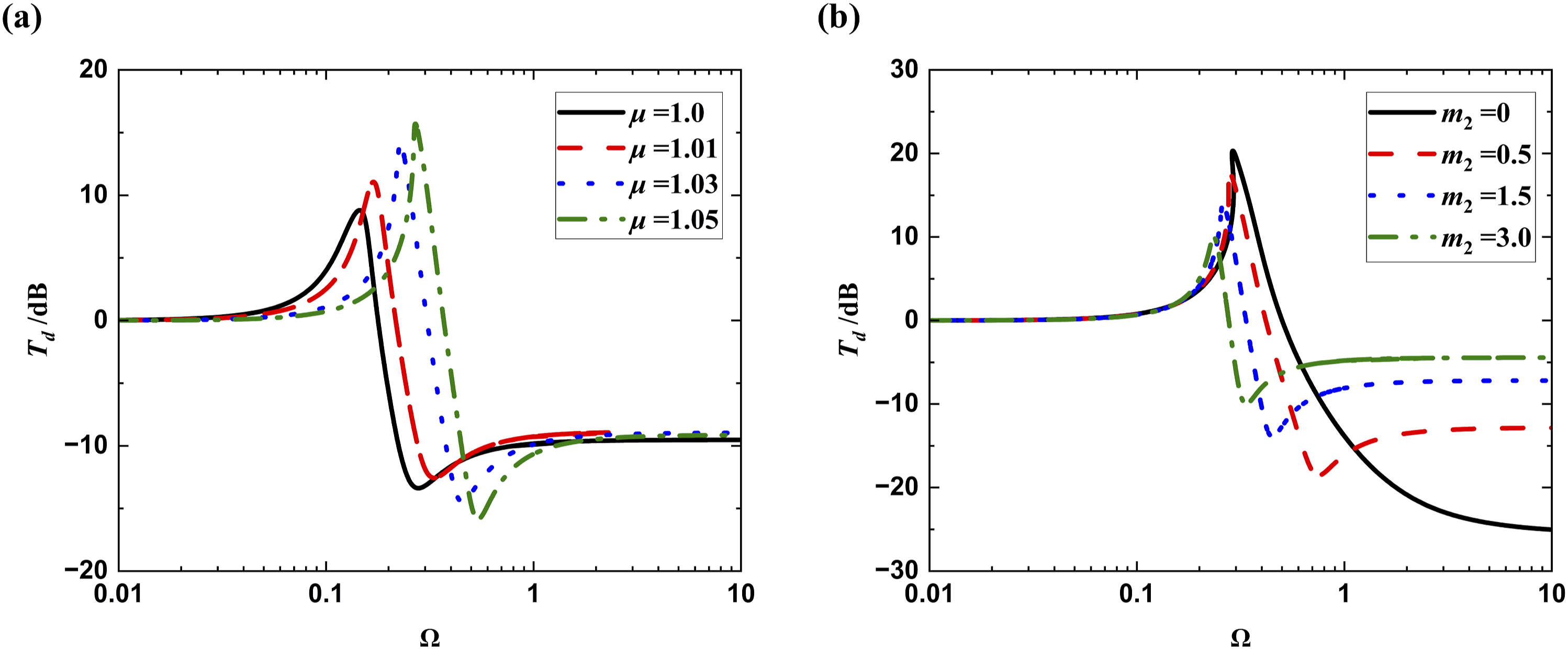
Figure 11(a) shows the displacement transmissibility
Influence of

The displacement transmissibility
Influence of

Under underload conditions
Figure 12(a) and (b) show the displacement transmissibility Displacement transmissibility for different (a) 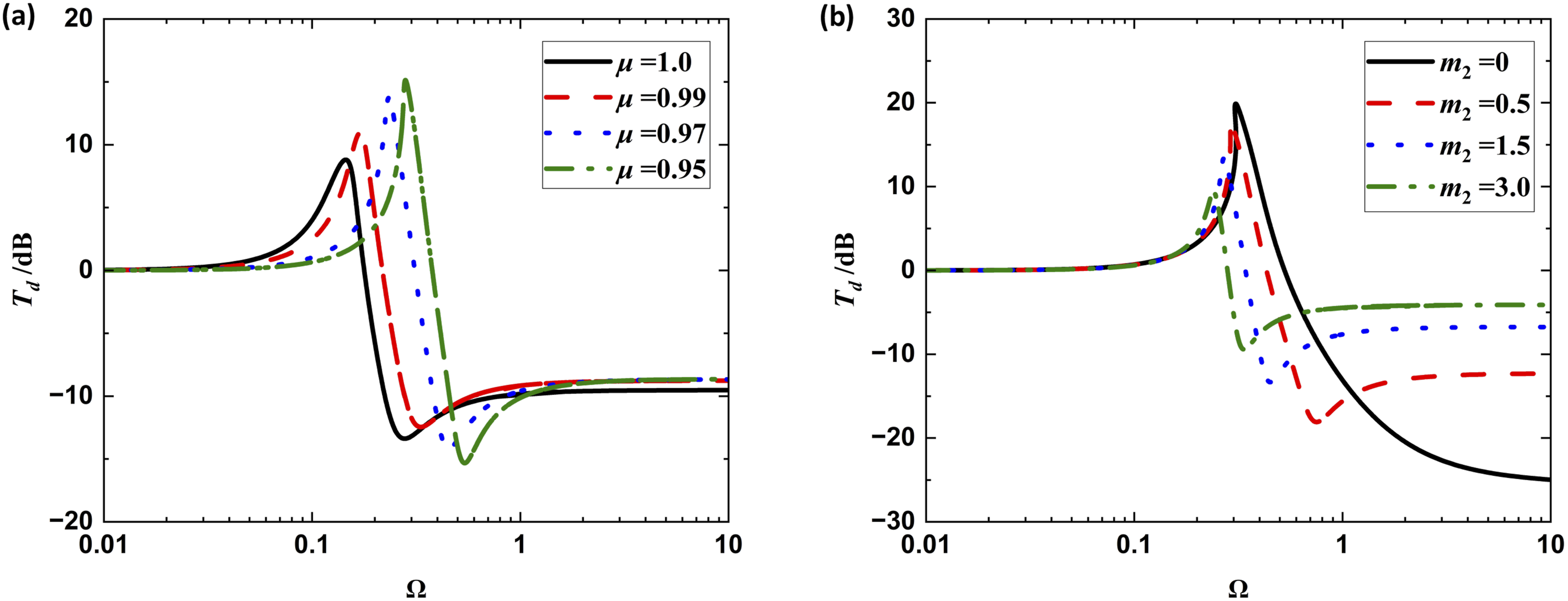
When operating under the rated mass, the displacement transmissibility
The displacement transmissibility
Conclusions
This study explores the applicability of a newly proposed nonlinear isolator, consisting of a high-static-low-dynamic-stiffness (HSLDS) and sliding mass inertia (SMI), to vibration isolation with primary mass deviation. The harmonic balance method (HBM) is used to obtain the steady-state response of the vibrating system. The backbone curve, resonance peak, displacement transmissibility, and other typical performance indices are determined by means of detailed parametric analysis.
The findings reveal that for the system with the HSLDS isolator, the mass deviation causes the backbone curve to bend leftward, renders the amplitude-frequency response of the isolator to demonstrate a softening stiffness characteristic, and results in an increase in the displacement transmissibility in the whole frequency region. A higher mass deviation amplifies these performance degradations. For the studied cases, the mass deviation ratio
To such performance degradations, the sliding mass has the opposite effect by mitigating the leftward bend and reducing the resonance frequency. The inclusion of SMI in the isolation system suppresses the softening exhibited by the HSLDS, and an increase in the sliding mass eliminates the softening behavior in the amplitude-frequency response and mitigates peak transmissibility. As the sliding mass
Footnotes
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.