
Abstract
A six degree of freedom nonlinear passive vibration isolator is proposed based on Stewart platform configuration with the quasi-zero-stiffness structure as its legs. Due to the high static stiffness and low dynamic stiffness of each leg, the proposed six degree of freedom system can realize very good vibration isolation performance in all six directions while keeping high static load-bearing capacity in a pure passive manner. The mechanic model of the proposed six degree of freedom isolator and the dynamic equation of the isolator are established successively. Theoretical analysis on cross coupling stiffness reveals that the system can demonstrate quasi-zero-stiffness property in all six degree of freedom. Moreover, an analysis on stability shows that the condition of structural parameters for the isolator to realize quasi-zero-stiffness is also the stability boundary of the system. A series of numerical simulations on displacement transmissibilities in coupled degree of freedoms, the coupling effects of transmissibility, and a dynamic response in random excitation are carried out to show the effectiveness of the proposed six degree of freedom isolator, as well as the influence of structural parameters on vibration attenuation performance. Considering its high performance in a simple passive manner, it can be foreseen that the proposed six degree of freedom isolator will be applied in various engineering practices with multi-degree of freedom vibration isolation.
Introduction
Various engineering applications would be impossible without a qualified multi-degree of freedom or six degree of freedom (6-DOF) vibration isolation, such as vehicle- or ship-mounted optical instruments, atomic force microscopes, space telescopes, and gravitational waves interferometer.1–8 However, the traditional passive isolator is effective only for high-frequency excitation. Typically, the active vibration control of Stewart platforms is employed to isolate 6-DOF vibrations in wide frequency range.9–13
With respect to active or semiactive vibration control systems, pure passive vibration system commonly has higher reliability, lower development cost, easier maintenance, and without independence of external power. 14 However, to extend the effective bandwidth of passive linear isolator a big mass and/or a small stiffness is desired, but it also results in the system being cumbersome or of lower loading capacity.12,15 Ideally, a passive 6-DOF vibration isolator should possess not only a low dynamic stiffness to effectively isolate vibration over a large bandwidth, but also a high static stiffness to firmly support a large weight mass, which implies a typical nonlinear stiffness characteristic. 16 Nonlinear systems are reported to be beneficial for vibration isolation over wider frequency range and could perform very well at low frequency.17–21 Generally, most of the exiting quasi-zero-stiffness (QZS) isolators were designed for attenuating the transmission of vertical translational excitations. In recent years, several types of 6-DOF nonlinear isolators have been proposed and demonstrated to have very good vibration isolation performance. Platus 22 proposed a compact 6-DOF QZS isolator with natural frequencies as low as 0.2–0.5 Hz. Zhu et al. 23 used magnetic levitation combined with a stabilizing control system to develop a 6-DOF QZS isolator. Wu et al. 24 used X-shape structures as the legs to assemble a 6-DOF QZS Stewart platform and analyzed the equivalent stiffness and the displacement transmissibility in the six decoupled DOFs. Zhou et al. 25 used compact QZS strut and studied the cross coupling stiffness and force/moment transmissibility to develop a 6-DOF QZS isolator.
In this study, a simple passive 6-DOF isolator is developed with Stewart platform configuration and QZS leg. The QZS leg is structured by a load-bearing spring and two oblique springs which serve as negative stiffness corrector. The structure is simple, thus a low processing cost and a high accuracy can be guaranteed. By properly designing the structural parameters of the 6-DOF system, it can realize QZS in all six directions with large loading capacity, and greatly enhance the performance of the 6-DOF isolator in a pure passive manner.
Structure of the 6-DOF isolator
Structure of the Stewart platform
Figure 1(a) shows the structure of 6-DOF passive Stewart isolator. The system contains a top platform with radius
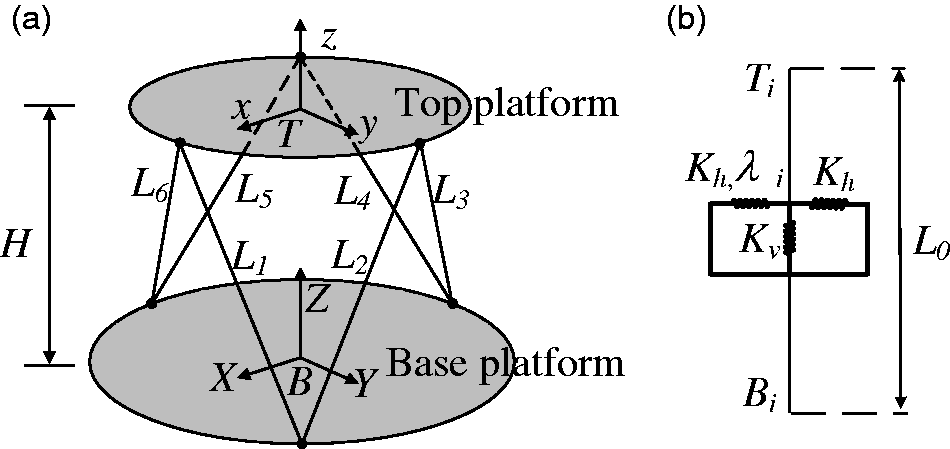
(a) The schematic diagram of the 6-DOF Stewart platform and (b) the structure of
Structure of QZS-based leg
As shown in Figure 1, each QZS-based leg is a single DOF system attached between base platform and top platform, in which a vertical spring serves as the positive stiffness element and two oblique springs as the negative stiffness element. Unlike typical research of QZS isolator, in this study, the QZS isolator is plugged obliquely in parallel to the connecting line of mounting point, as shown in Figure 1(a).
The stiffness of the vertical and oblique springs are

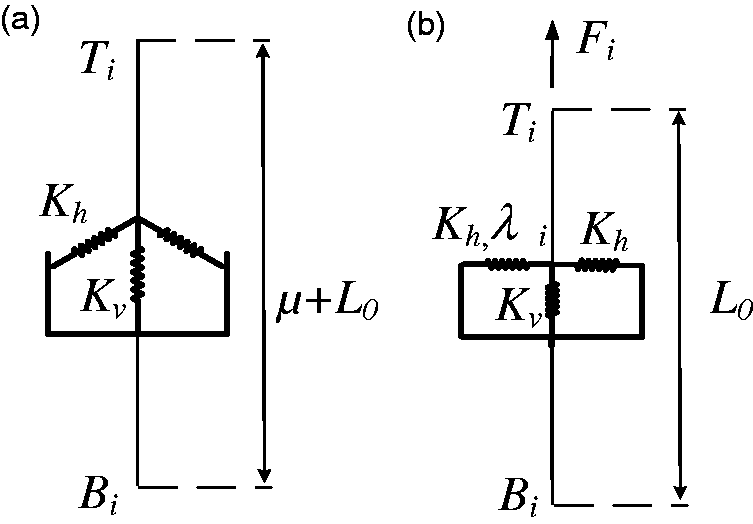
Scheme diagram of the QZS leg. (a) Position before assembling mass and (b) equilibrium position.
Static analysis of the 6DOF isolator
Stiffness of the QZS leg
When the QZS leg vibrates around equilibrium position, by analyzing the mechanical relationship in Figure 2(b), the dynamic term


In Figure 3, the values of the applied force expanded by the third-order Taylor series are close to the original expression of equation (2). Therefore, in the following discussion,
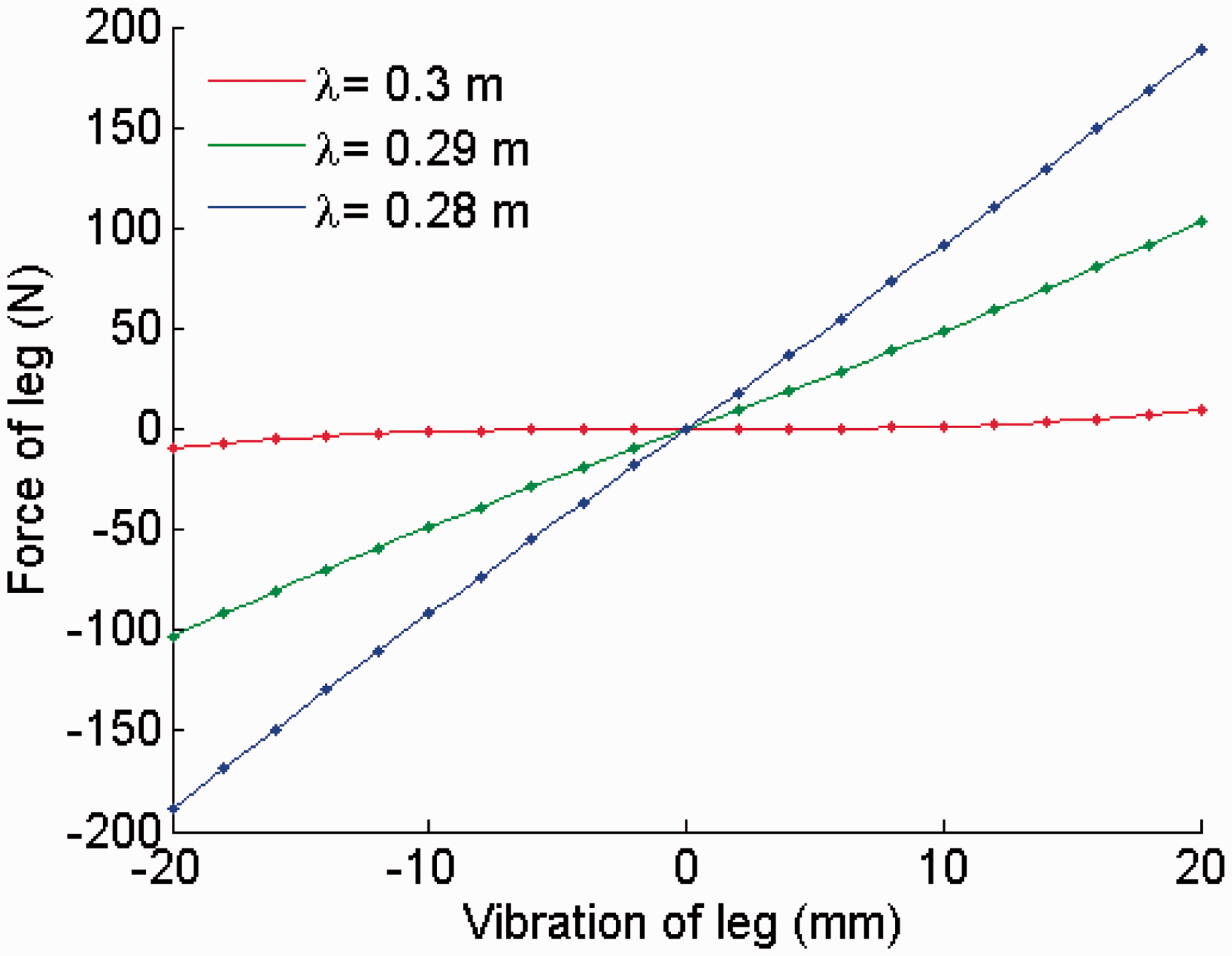
Comparison of (lines) the applied force of (2) and (dots) the third-order Taylor expansion as (3) for different
Modeling
Define




Assume the precompressions
Clearly, for certain parameters of Stewart structure and QZS legs,
Cross coupling stiffness
From equation (9), the stiffness of the 6-DOF isolator can be given by
Clearly, for specified structural parameters of the isolator, the first part of system stiffness

With the increase of precompression
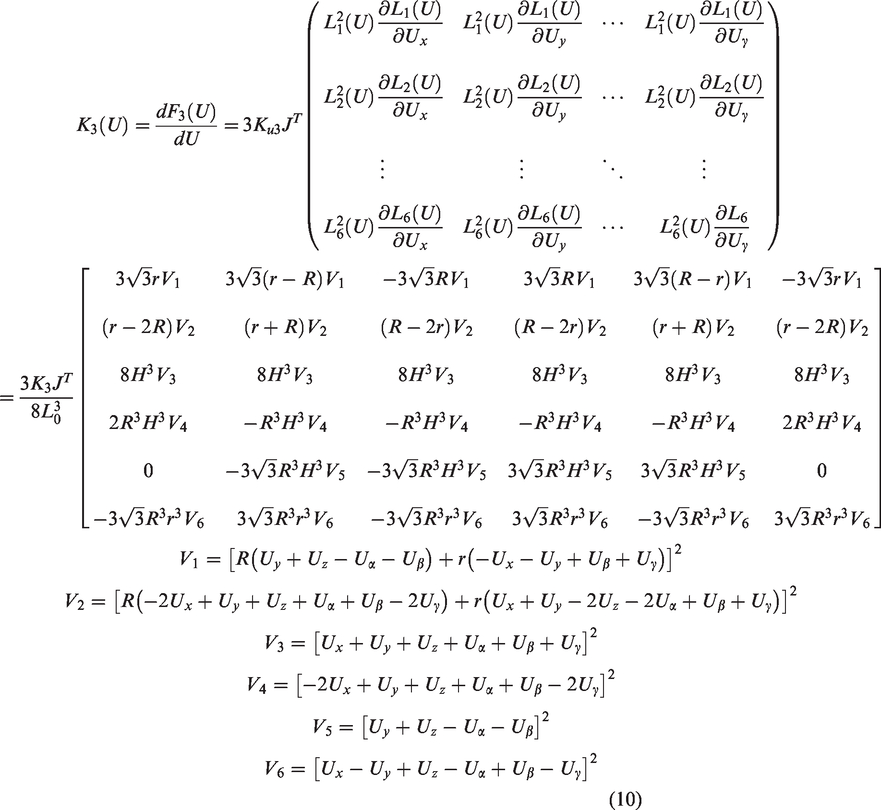
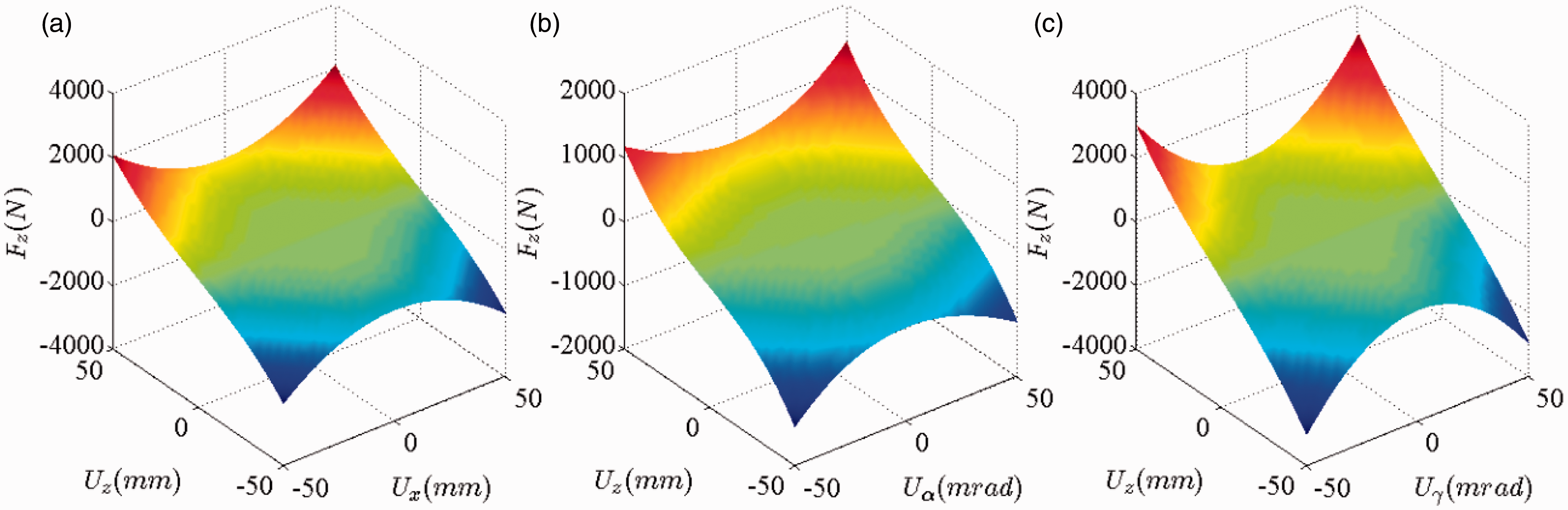
From equation (9), the restoring force is fully coupled with displacements in all 6-DOFs. Figures 4 and 5 show the force/torque–displacement relationships of
Force–displacement relationship of
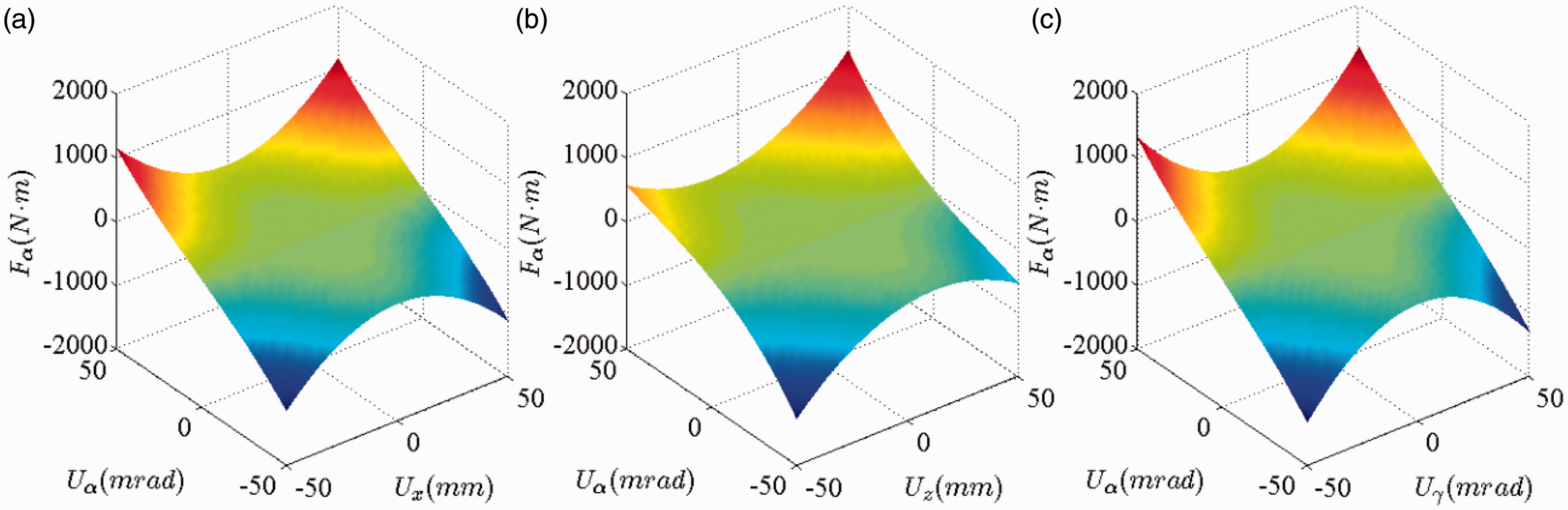
Torque–displacement relationship of
Stability analysis
From the analysis above, it can be found that the linear part of the stiffness decreases with the precompression increasing. However, if the structure parameters of the 6-DOF isolator are improperly changed, the system can be unstable, which will induce danger in practice. Thus, to maintain the stability of the system at equilibrium position
The stability of a noncritical stable nonlinear system can be determined by its first-order approximation.
26
For

The stability of the equilibrium depends on the eigenvalues of the system.27–29 For the Stewart platform proposed in “Structure of the 6-DOF isolator” section
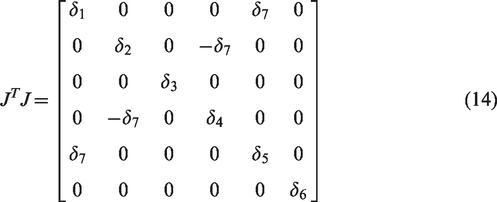
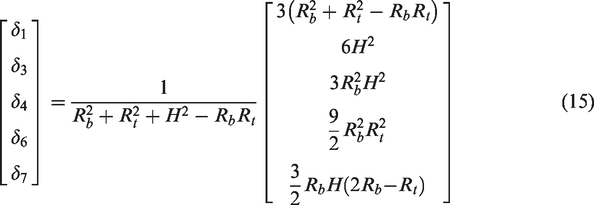
Then the eigenvalues
Obviously,

Therefore,
Because
For


A Hermitian matrix is positive semidefinite if and only if all of its principal minors are nonnegative.
30
Obviously,
Dynamic analysis
Displacement transmissibility
Utilizing the relative vibration as the variables, the dynamic equation (4) can be rewritten as

The first approximation of the primary resonance is obtained by the harmonic balance method. Assume the base displacement excitation

By ignoring the high-order harmonic terms,


The displacement amplitudes

Figure 6 shows the comparison of displacement transmissibility of the 6-DOF Stewart isolator with QZS-based legs for different
Comparison of the displacement transmissibility of the isolator for different precompressions: (black)
Figure 7 shows the comparison of displacement transmissibility of the 6-DOF Stewart isolator with different damping coefficient
Comparison of the displacement transmissibility of the isolator for different damping coefficients: (black)
Figure 8 shows the vibration isolation performance of the 6-DOF Stewart isolator with different base excitation amplitudes. For small
Comparison of the displacement transmissibility of the isolator for different excitation amplitudes: (black)
Effects of coupling stiffness
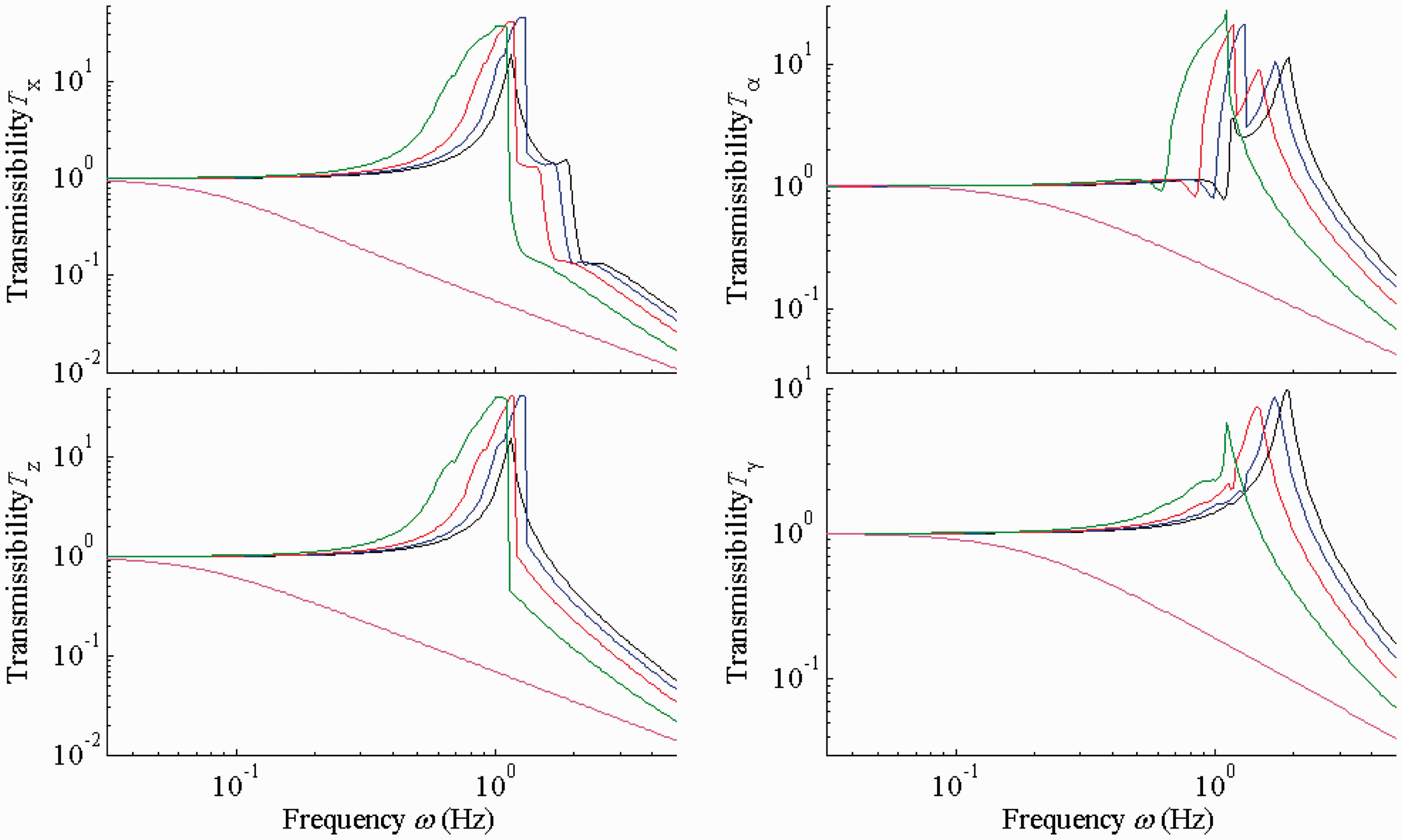
From equation (10), Figures 4 and 5 the stiffness of each direction is not only related to current DOF, but also coupled with all 6-DOFs. From Figure 9, with the increase of excitation DOFs increase from 1 to 3, the coupling effects is more and more significant. And particularly, when the excitation DOFs increase from 1 (
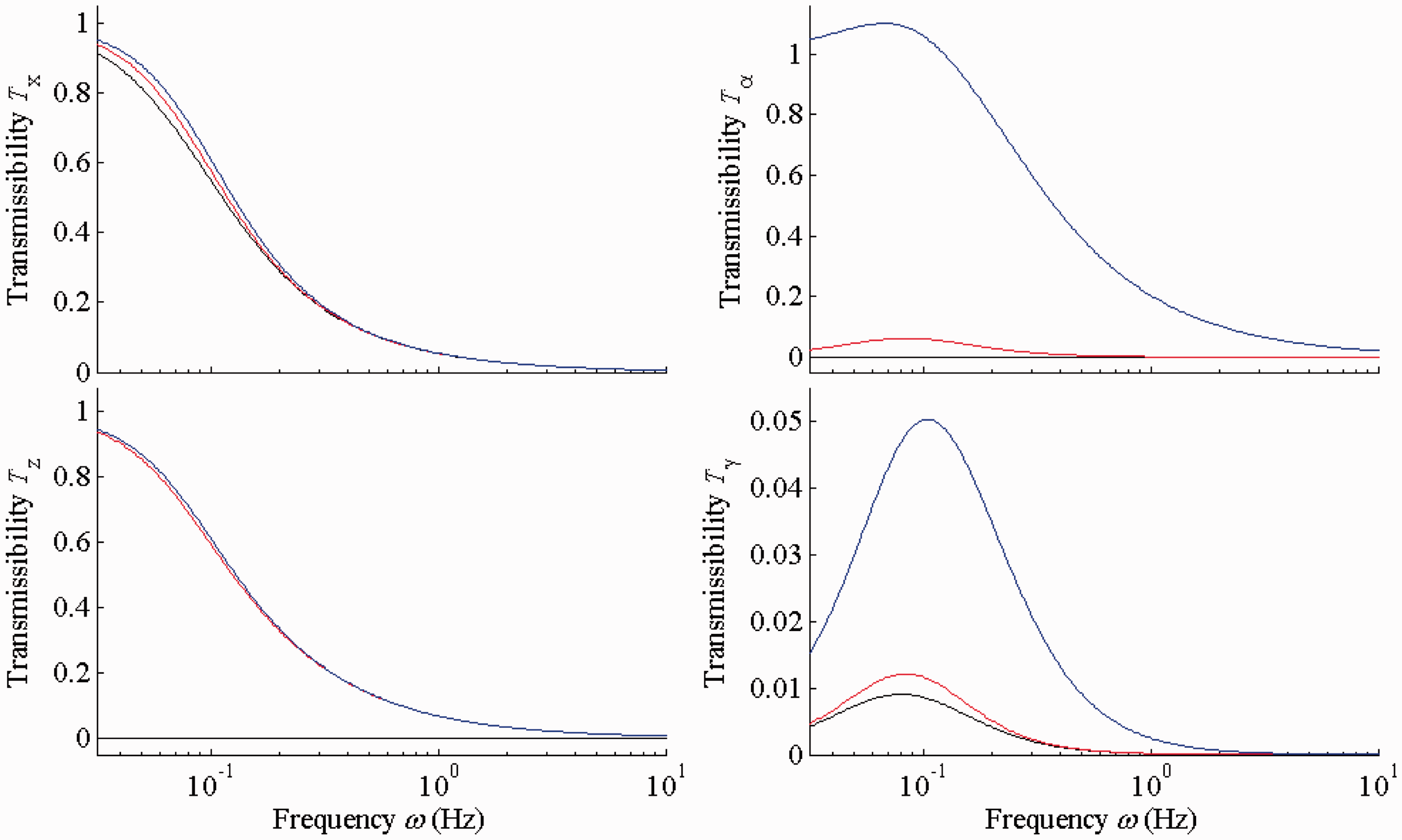
Comparison of the displacement transmissibility of the amount of excitation DOFs: (black)
To show the coupling effects of the isolator more clearly, define
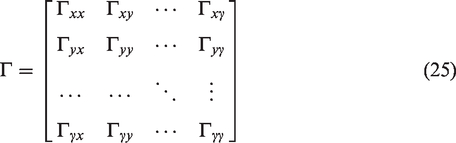
Each element

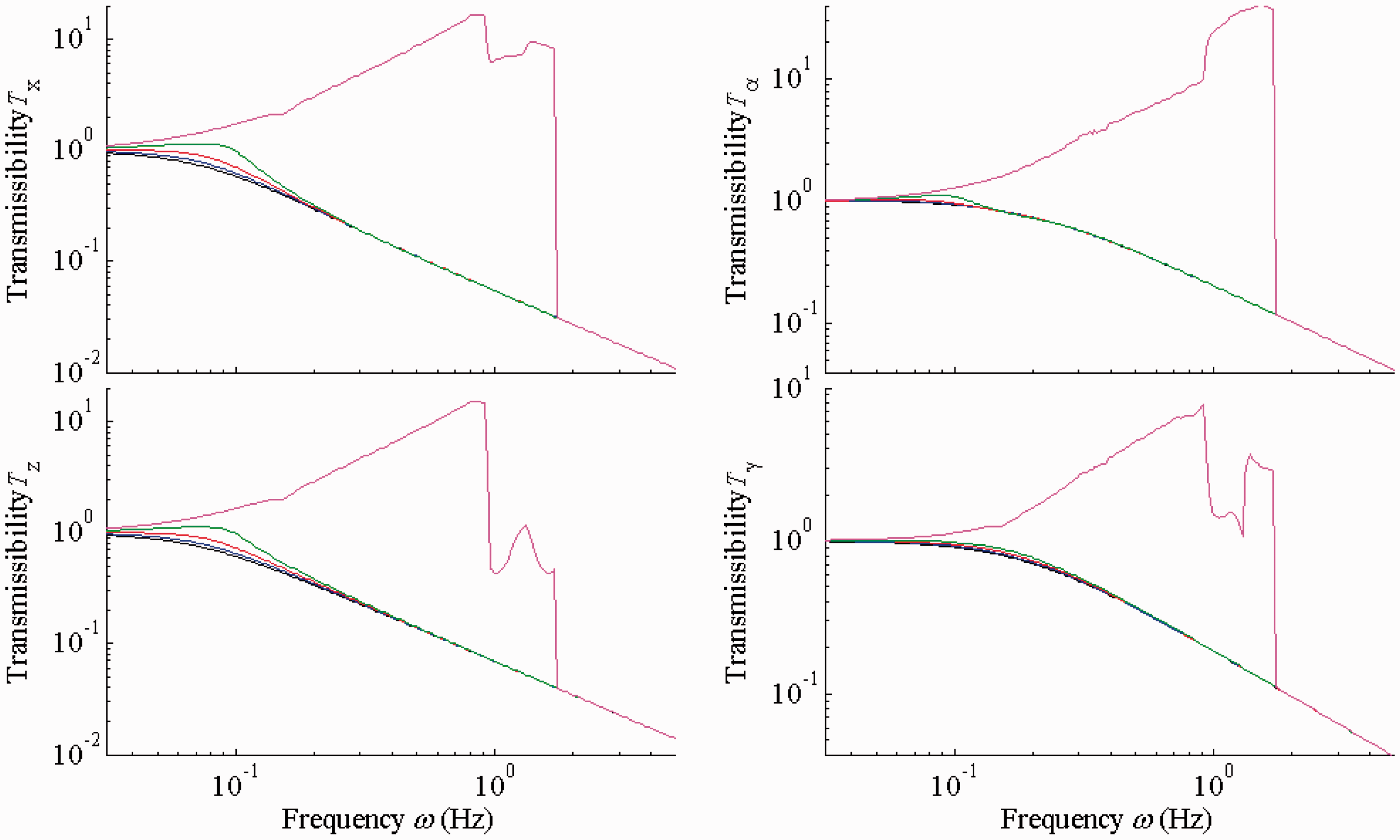
Figure 10 shows the coupling transmissibility of the isolator. It can be seen from the curves that, for system reaches QZS and micro-vibration, the coupling transmissibility is little except for diagonal element.
The coupling transmissibility of the isolator. (black,
Comparisons with the simplified linear case
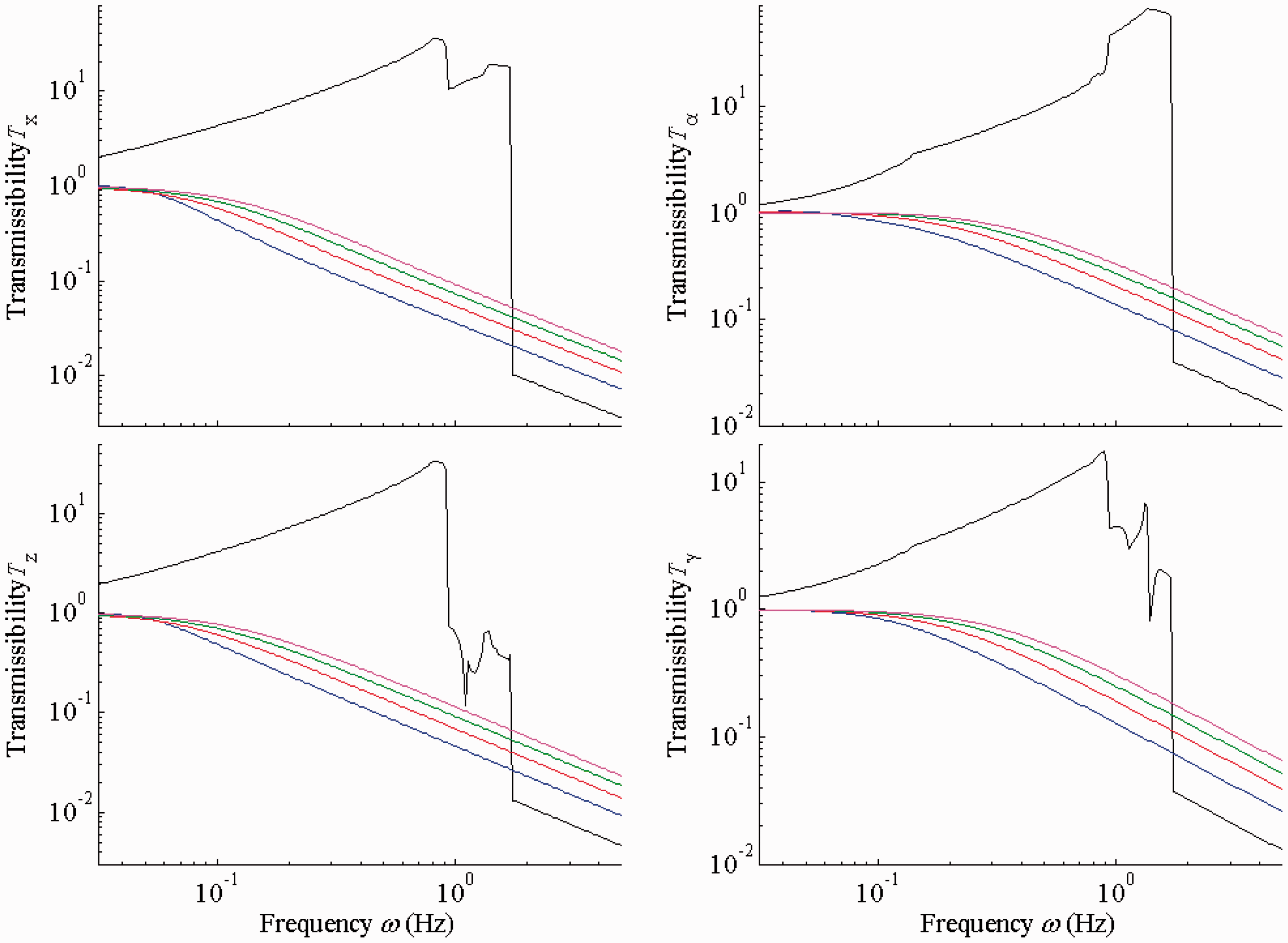
Figure 11 shows the comparison of the displacement transmissibility of the 6-DOF isolator with different types of legs. The spring stiffness of the linear legs is equal to that of vertical spring in QZS legs. And the linear legs have no oblique spring. Both the two systems present vibration isolation performance in all directions. Figure 11 shows that compared with the 6-DOF isolator with linear legs, the proposed system has no resonance peak and significantly smaller vibration mitigation in all 4-DOF.
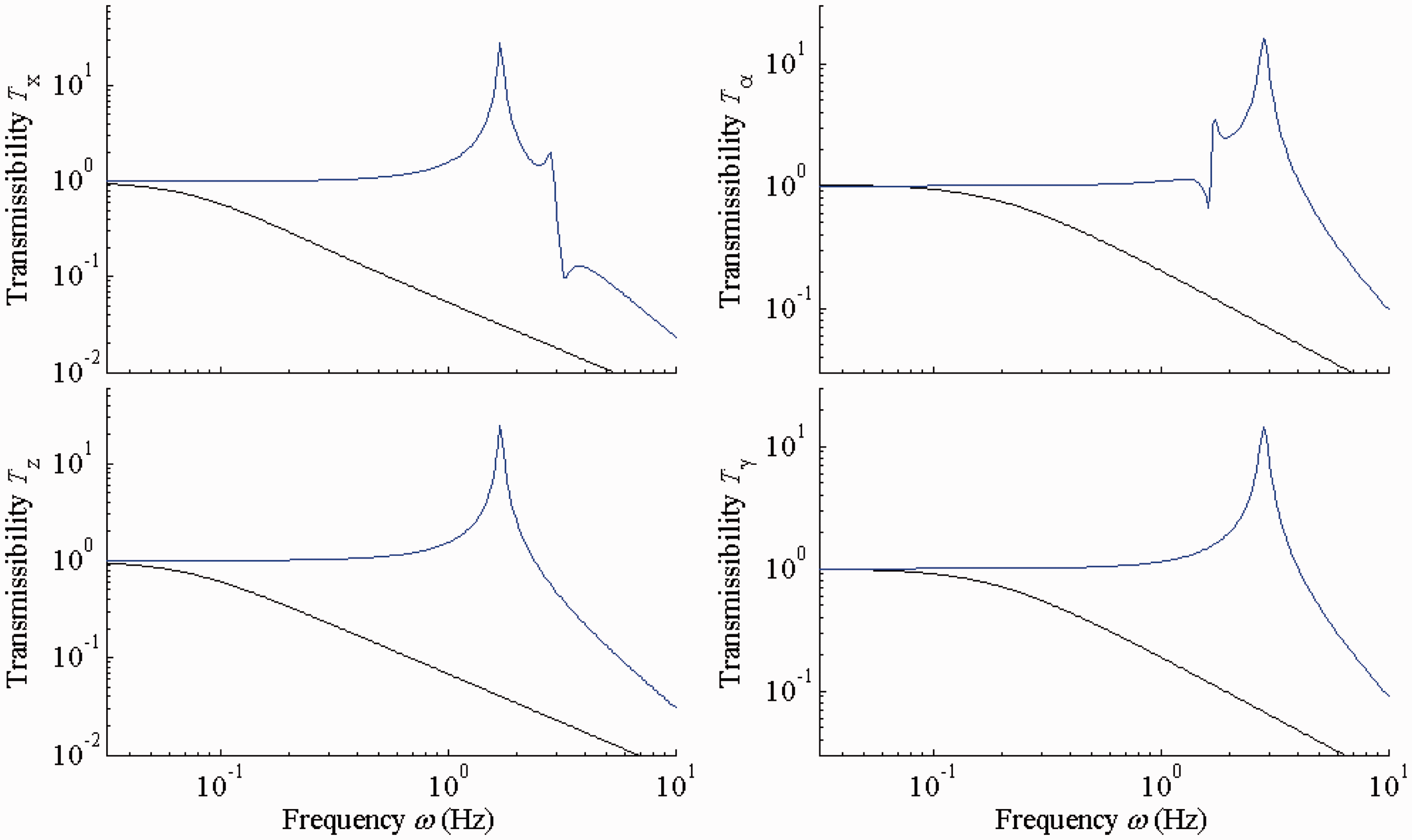
Comparison of the displacement transmissibility of the 6-DOF isolator with (black) QZS leg and with (blue) corresponding linear stiffness leg.
Simulation with random excitation
Figure 12 shows the time series of the random excitation
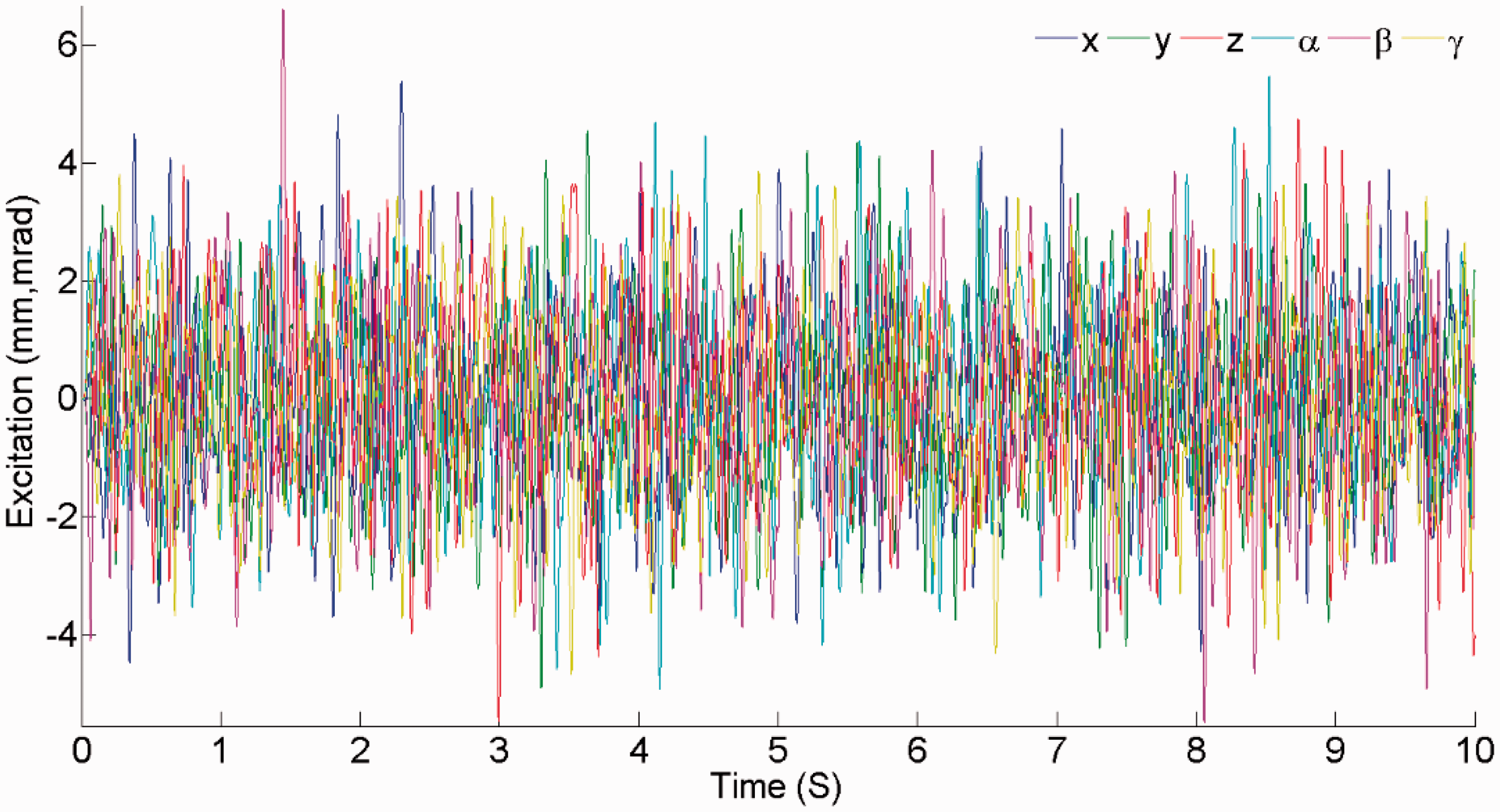
Time series of the random excitations of the 6-DOF isolator.
Figure 13 shows the time series of the dynamic vibration response of the 6-DOF isolator
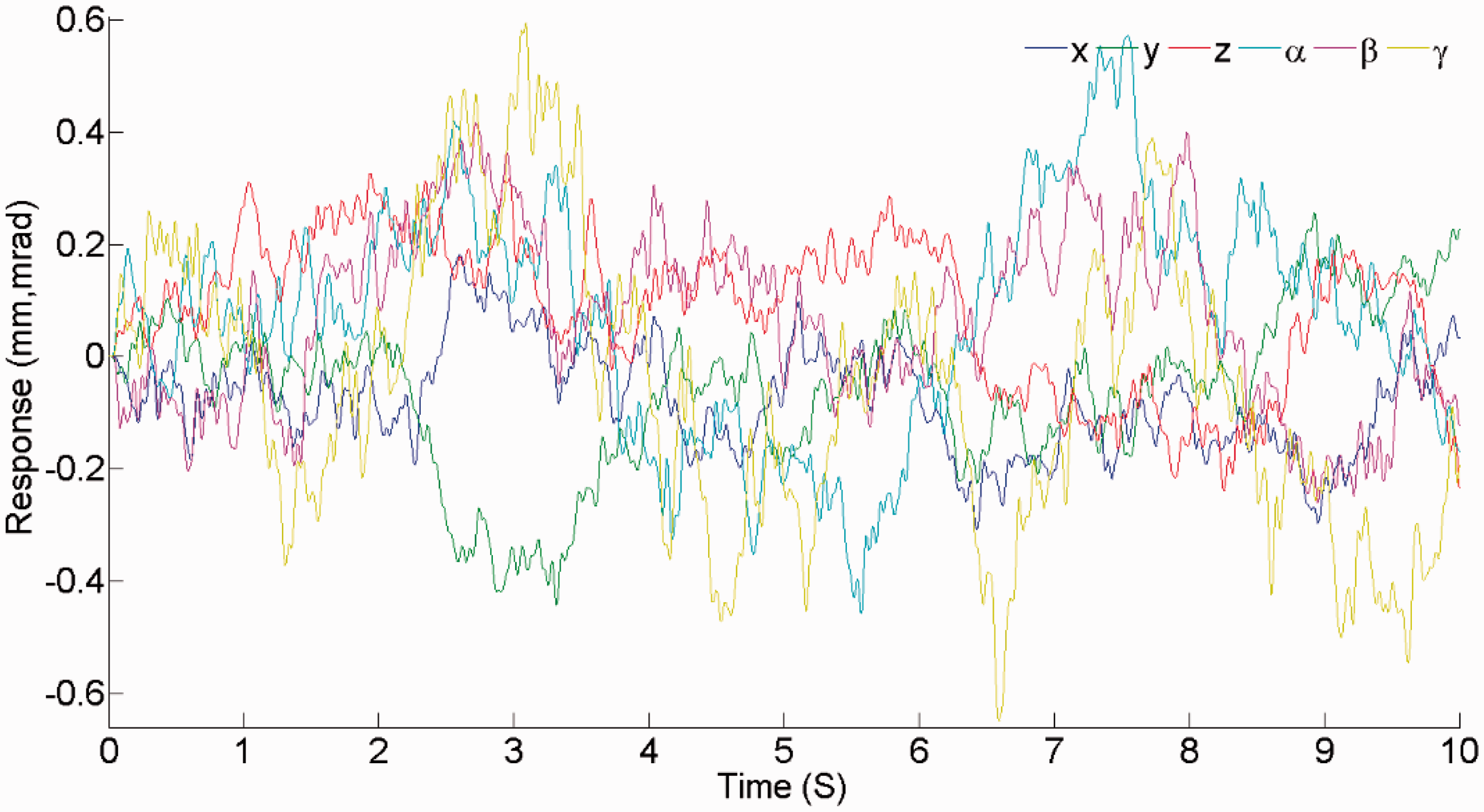
Time series of the vibrations of the top platform of 6-DOF isolator with QZS-based legs.
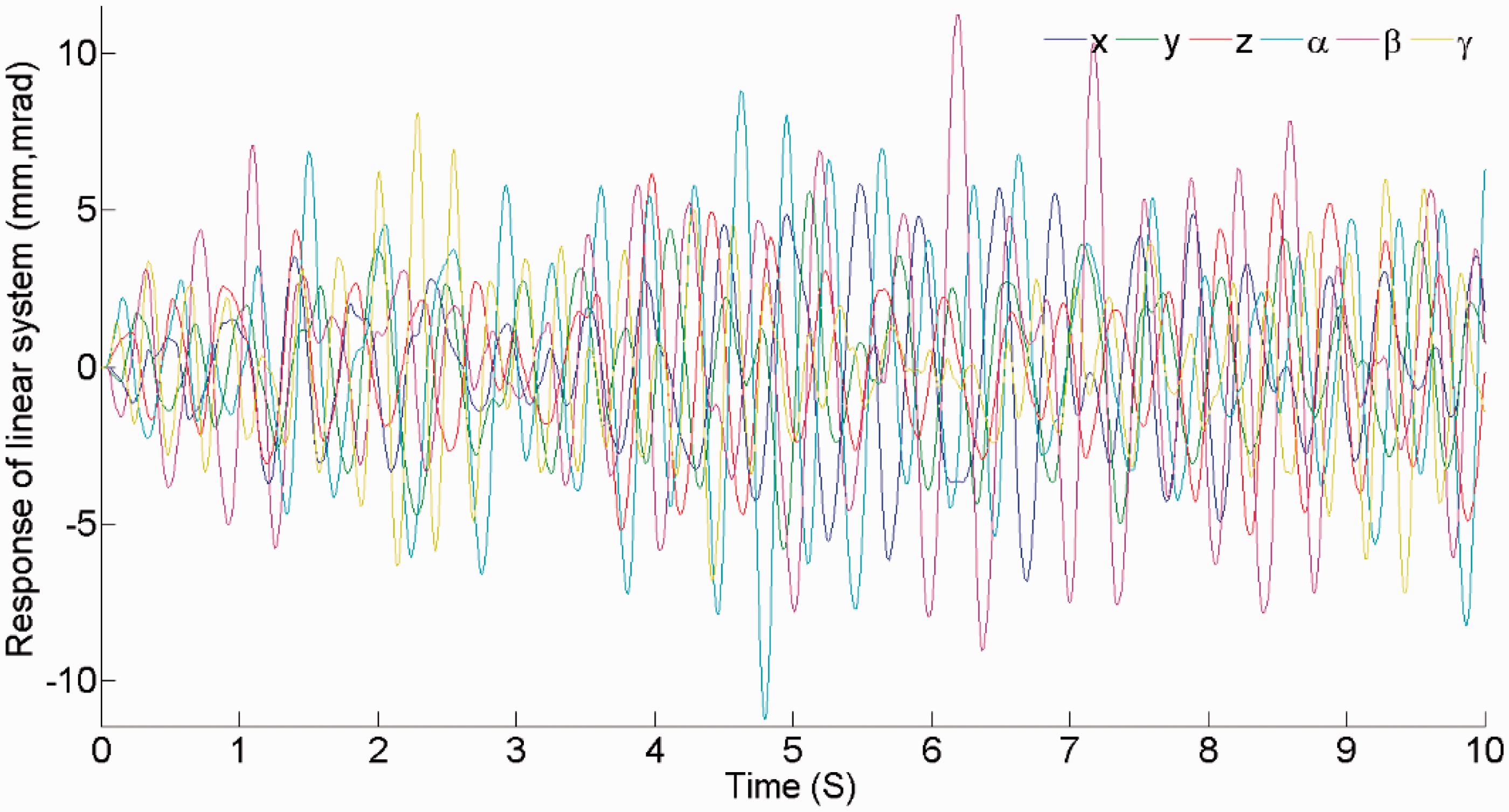
Time series of the vibrations of the top platform of 6-DOF isolator with linear legs.
Conclusions
In this paper, a 6-DOF passive Stewart vibration isolation platform with QZS-based leg is studied and its nonlinear stiffness advantages in 6-DOF vibration isolation have been presented. The feature of the nonlinear stiffness is employed by simple QZS-based legs, and each QZS leg is composed of two precompressed oblique springs as negative stiffness corrector and a loaded linear stiffness spring. By properly designing the structural parameters of each leg, the 6-DOF isolator can achieve very small stiffness even zero stiffness around the equilibrium position of all six directions. The stability analysis of the equilibrium point of the 6-DOF isolator shows that the condition of structural parameters reach QZS is also the boundary of its stability. Both theoretical analysis and simulation studies vindicate clearly that the 6-DOF Stewart isolator can realize very good vibration isolation in all 6-DOF simultaneously in a passive manner. Future work will focus on building a prototype of the 6-DOF isolator and carrying out experimental investigations to confirm its effectiveness.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.