
Abstract
Construction vehicles generate significant cabin noise, which includes both consistent and impulsive noise from engines and components. The noise imposes hearing loss threats to the operators during long operation hours. Active reduction is required for efficient impulsive noise minimization. Traditional approaches such as the filtered-x least mean square (FxLMS) algorithm, often prove inadequate in effectively controlling these impulsive noises, due to non-Gaussian characteristics. Robust algorithms for active impulsive noise control (AINC) systems are required for applications to construction equipment. The convex combined step-size (CCSS) based variable step-size (VSS) along with integrating the normalized least mean square (NLMS) into a modified FxLMS (MFxLMS) with an adaptive step-size update algorithm is used for reduction of the vehicle interior noise. The A-weighted filtering enhanced the noise reduction efficiency by incorporating human auditory characteristics. This filtering also minimized unnecessary control loadings at low frequency noise components. The performance of the proposed algorithm was evaluated through experiments conducted using a portion of the actual excavator cabin. The results demonstrated robust and excellent noise reduction performance against unexpected impulsive sounds.
Keywords
Introduction
For heavy equipment workers, it is required to operate the construction machinery for long hours. To ensure safe working environment with improved acoustically comfortable space, the impulsive noise due to machinery operation should be reduced in a significant amount that cannot be achieved using conventional passive noise control methods. The successful noise control strategies evolved into research on active noise control (ANC) that generates an anti-noise to counteract unwanted sound, directly addressing the source of the noise. 1 Passive methods reduce noise through the use of high-density materials as barriers or by absorbing sound energy into porous materials that convert it into heat. This approach has been particularly beneficial in industries where noise design is critical, such as in automobiles. 2 Passive treatment efficiency falls off in controlling low-frequency impulsive noise, leading to the active exploration of ANC systems in engineering applications.3,4
ANC aims to reduce unwanted noise by generating an anti-noise that disrupts the original sound, thereby lowering the overall level. This method offers potential benefits in various applications, especially for vehicles 5 and buildings.6,7 It also provides an effective means to noise reduction generated in construction sites. 8 The substantial noise produced by frequently used heavy equipment like excavators, which often generate impulsive noise, poses significant health concern to operators. 9 Consequently, the development of practical ANC methodology capable of effectively mitigating impulsive noise has become a critical task.
Among the equipment consistently used on construction sites, excavators are known for generating considerable noise and are a prime source of impulsive noise. Therefore, this research focuses on developing and applying a new ANC algorithm specifically tailored to reduce noise from excavators. For successful active impulsive noise control (AINC), the symmetric α-stable (SαS) distribution is an effective non-Gaussian model for the impulsive noise, suitable for representing noise with low probability but large amplitude.
10
The characteristic function of the S

The S
These heavy-tailed distribution characteristics also make signals unsuitable for application with the FxLMS algorithm. Although FxLMS is advantageous for configuring ANC systems due to its excellent convergence performance and low computational cost, it is designed to minimize error in steady states, making it inappropriate for controlling impulsive noise with potentially infinite variance. This mismatch leads to significantly reduced control performance or divergence when using FxLMS for AINC.
In the recent years, various approaches were explored for AINC systems. These researches are included variable step-size (VSS), 11 affine projection sign algorithm (APSA), 12 and Volterra filter algorithm. 13 Especially, Chien et al. developed a boosted multi-filter APSA scheme with a combined variable step-size (CBVSS-APSA) to improve convergence for application to impulsive noise. Another state-of-the-art method introduces a sparse quasi-Newton LMS with bias compensation and a variable mixing-norm cost function to address impulse noise and input noise simultaneously. 14 These methods achieve effectiveness in general impulsive environments and excellent steady-state accuracy, respectively.
This study proposes a novel AINC algorithm specifically designed to effectively reduce impulsive noises, considering human auditory characteristics. The proposed method adaptively combines two step-sizes to achieve a balanced performance between rapid convergence and low steady-state misalignment. Specifically, two weighted filters incorporating the proportionate filtering approach based on these two step-sizes enhance noise control performance. Moreover, the integration of the A-weighted psychoacoustic model optimizes the noise reduction efficiency by emphasizing frequencies most sensitive to human hearing. This method significantly enhances the comfort and auditory health of operators by effectively managing noise generated from heavy machineries.
Experimental validation was performed using a heavy machinery (excavator cabin) environment, demonstrating that the proposed algorithm could serve as an effective alternative for active noise control, providing superior reduction performance and practical feasibility in impulsive noise environments. Second section delineates the architecture of the proposed algorithm. Third section outlines the experimental setup designed to record operational noise from construction machinery and details the real-time experiments conducted to verify the performance of the algorithm. Fourth section compares the experimental results with the control performance of existing algorithms, specifically addressing two important types of operational noise from excavators, and also evaluates the robustness of the proposed algorithm against impulsive signals. Fifth section discusses the efficacy of the enhanced AINC algorithm in noise control for heavy machinery, emphasizing its advanced capability in mitigating both impulsive and continuous noise and improving acoustic comfort.
Theoretical background for A-weighted AINC
FXLMS algorithm for ANC system
The FxLMS algorithm is the most frequently used due to its low computational complexity and serves as the foundation for most ANC algorithms.
15
The block diagram of the FxLMS-based feedforward ANC algorithm is shown in Figure 1. The error signal can be expressed as follows: Fundamental block diagram of the FxLMS algorithm for active noise control.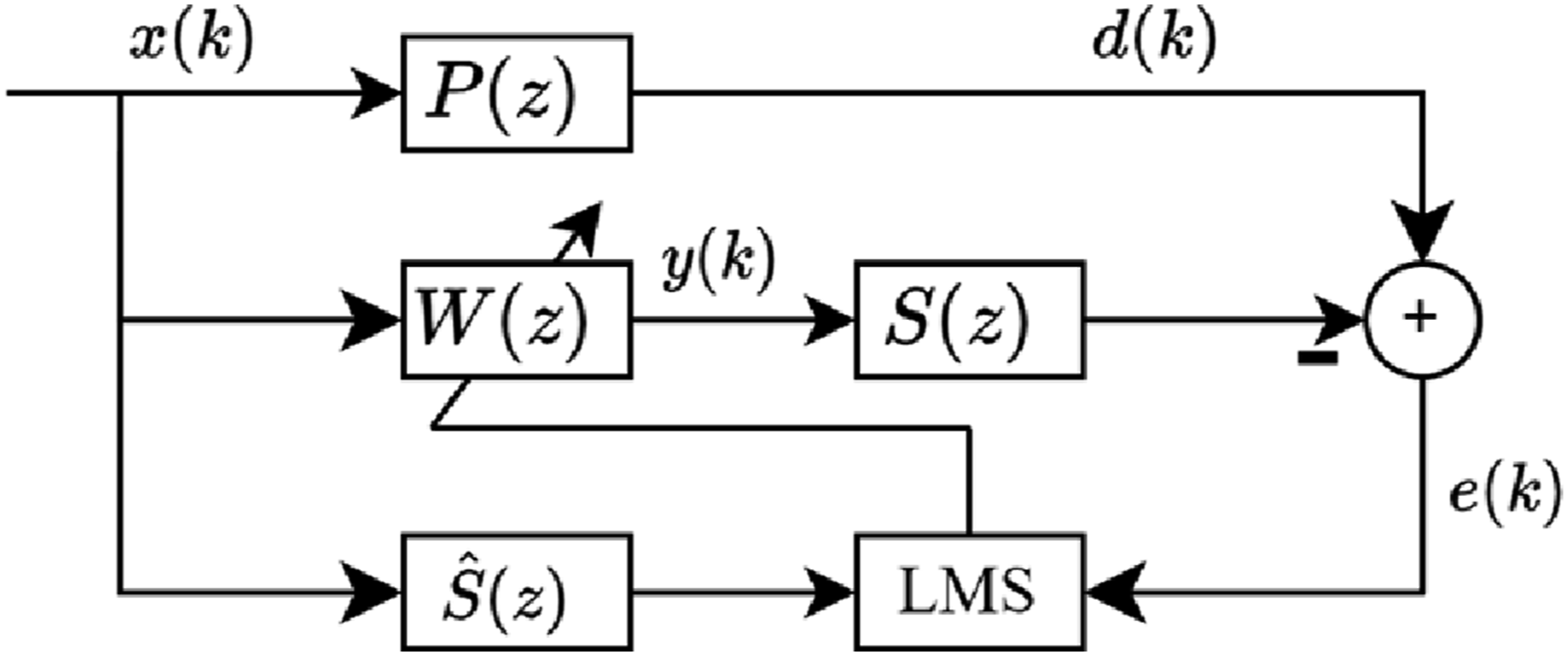



FxLMS offers significant advantages in practical applications across various environments. However, challenges may arise when using the FxLMS algorithm in specific environments, particularly those involving impulsive noise. Impulsive noise, although occurring with low probability, has high amplitude and exhibits non-Gaussian characteristics. The random peaky samples in the reference signal
Modified normalized FxLMS algorithm
The fundamental structure of the proposed algorithm for this paper is derived from the MFxLMS algorithm.
16
Figure 2 shows the block diagram of the MFxLMS algorithm. As illustrated, this algorithm incorporated an additional weight filter and a secondary path filter by estimation. Here, Fundamental block diagram of the MFxLMS algorithm for active noise control.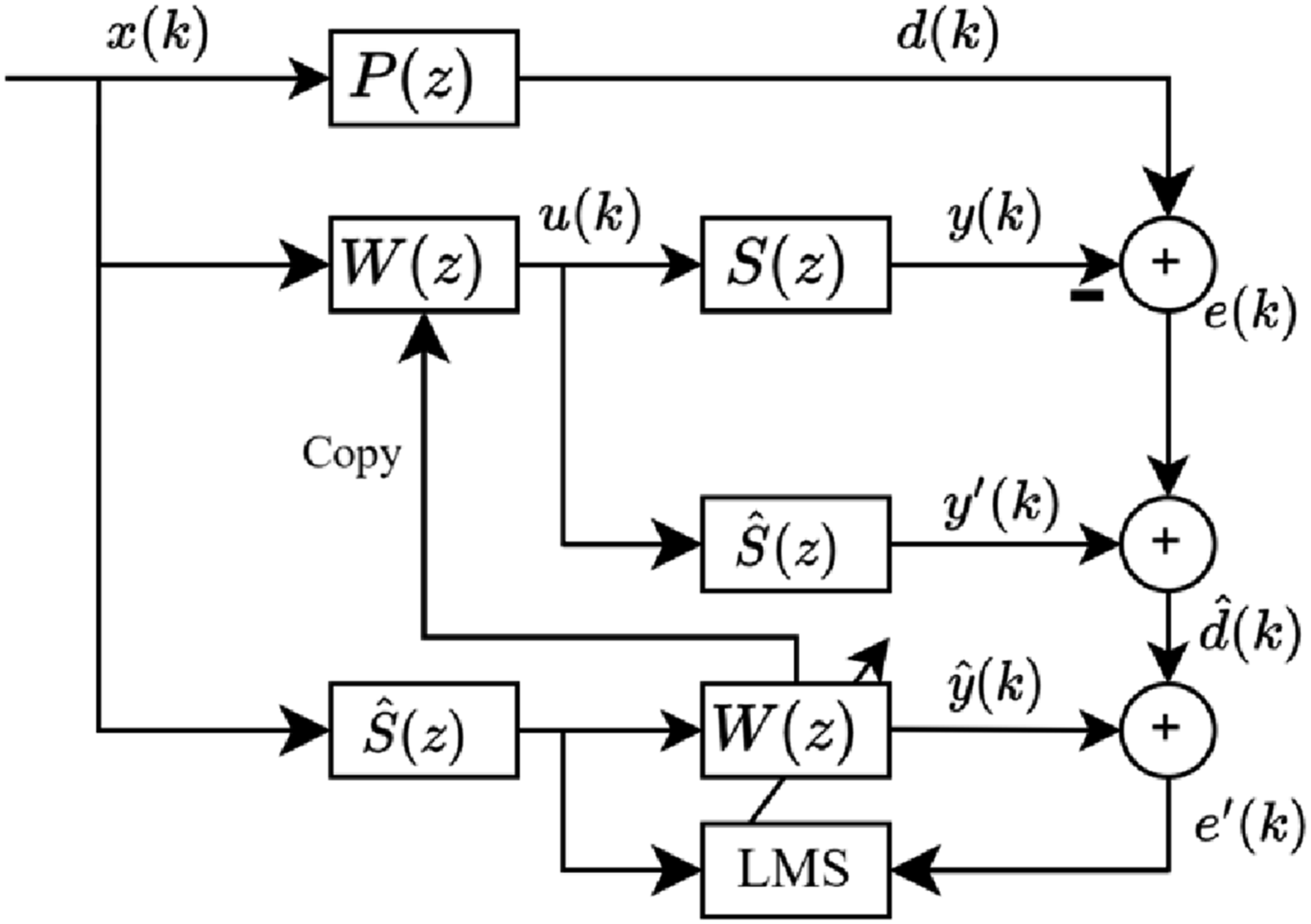
This algorithm updates the weight vector using a step-size term in a normalized LMS,
17
which is expressed as





Through this process, the weight filter
Proportionate filter via convex combination
The LMS algorithm is frequently employed in various fields with the objective of minimizing errors. However, it has the disadvantage of requiring the step-size to be set through multiple trials and errors. Traditional ANC methods, often based on LMS algorithms, share this drawback. The issue arises from the trade-off between speed of adaptation and misadjustment, which is mainly influenced by the step-size magnitude. A large step-size accelerates convergence but reduces accuracy, while a small step-size enhances accuracy but slows down convergence. To compensate for this trade-off and enhance performance, research has been conducted on VSS algorithms, such as Refs. 18 and 19. However, VSS algorithms can suffer from stability challenges when the step-size changes rapidly. A method that resolves these issues and is suitable for application to AINC is to combine two adaptive filters into a convex combination.20–23 The weight vector of this algorithm can be expressed in two parts as follows:





This equation demonstrates that






The derivative of


Substituting (22) into (20), the update equation for

This algorithm introduces a novel ANC method for impulsive noise and has demonstrated superior reduction performance verified through simulations.
A-weighted ANC for impulsive noise
If an A-weighting filter is not included, the system tends to normalize the frequency spectrum of incoming signals, including various noises, to approximate the flatness as like white noise. This method mainly reduces the low-frequency components of sound, which are particularly difficult for humans to perceive. Considering the environmental conditions described in this study, where the primary concern is noise that not only manifests predominantly in the low-frequency spectrum but also includes significant impulse noises that trigger responses across the entire frequency range, the absence of an A-weighting filter results in a reduction in perceived loudness that is not significantly noticeable. Consequently, without the A-weighting filter, the decrease in the perceived loudness of auditory disturbances for human users is not substantially noticeable, thus failing to achieve optimal control performance from the perspective of acoustic comfort.
In order to consider the sensitivity of human hearing, it is necessary to pre-filter with A-weighting in the form of FIR at each of the system I/Os. The level of A-weighting for each frequency is calculated as follows
26
:


The diagram of the proposed algorithm incorporating A-weighting is shown in Figure 3. The reference signal and error signal, immediately after being acquired by the microphone, are filtered by the A-weighting pre-filter Block diagram of proposed algorithm.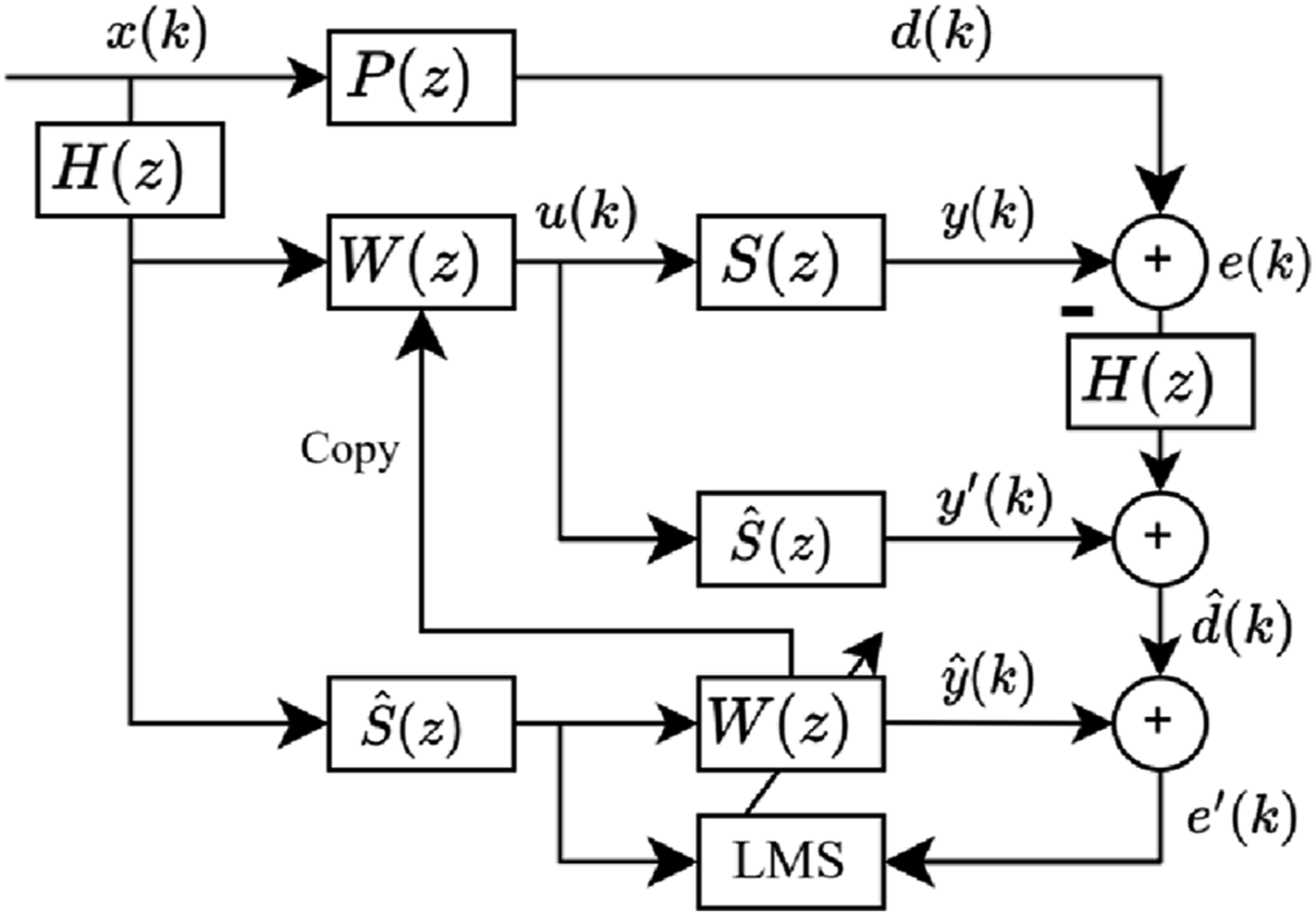






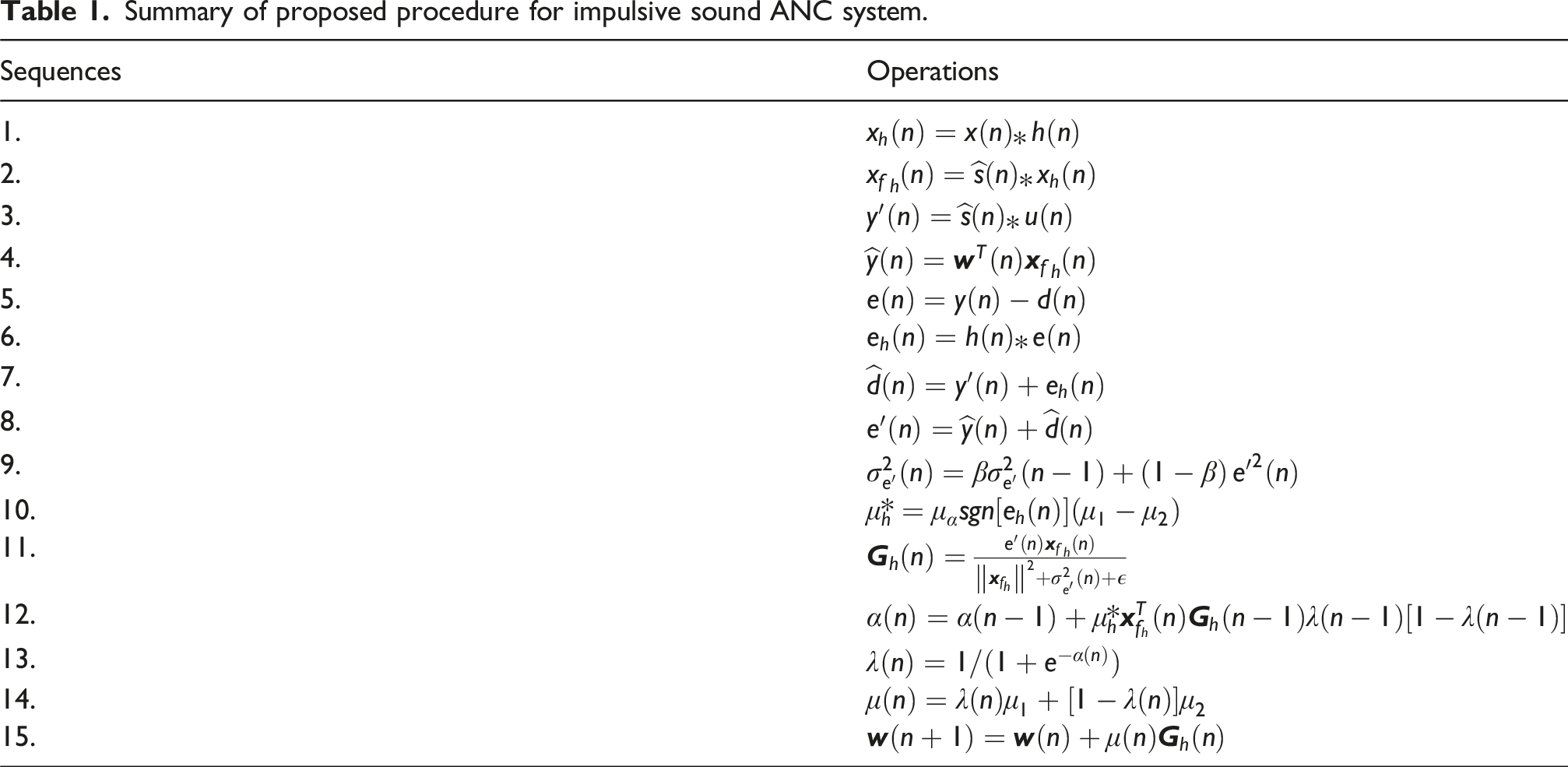
Summary of proposed procedure for impulsive sound ANC system.
Experiments on actual construction machinery for ANC
Operation noise in actual construction machinery – Excavator
For verification of the active noise control performance, an excavator was used for the active noise control experiments. The noise emitted during operation was acquired using the commercial excavator. The sound was recorded at the sampling frequency of 8192 Hz via B & K Type 3160. As shown in Figure 4, the microphone was positioned between the noise source (engine) and the cabin to measure the primary noise. Overall view of the excavator (left) and the location of the microphone for noise acquisition (right).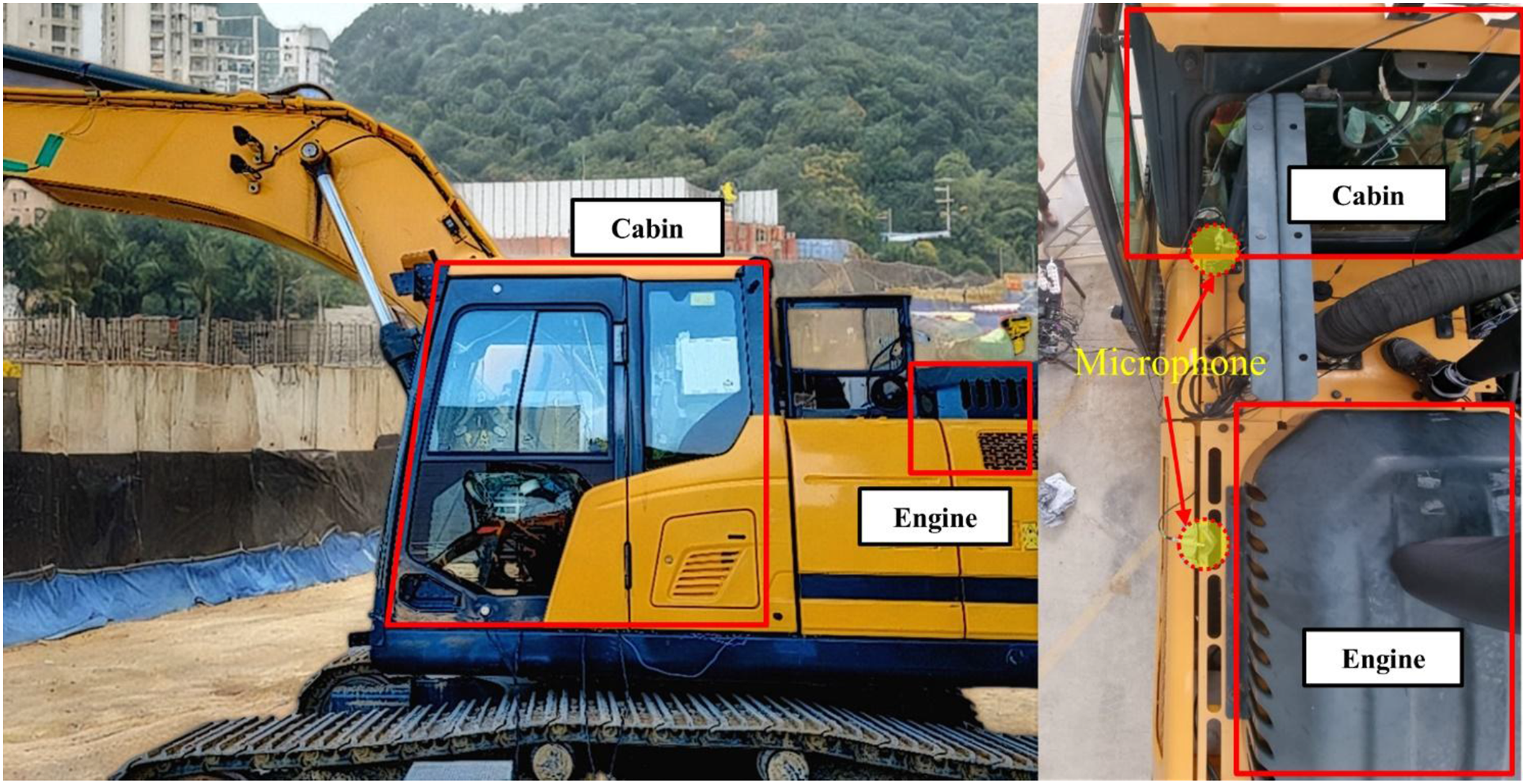
The actual excavator operating noises were measured during bucket operations. The idle engine sounds at 1800 r/min generated together with the impact sounds. The engine sounds were characterized by the harmonics of 15 Hz, corresponding to the rotation of the four-cylinder engine, and predominantly featured the noise spectrum below 500 Hz (Figure 5). Spectrograms of excavator sounds (a) at 1800 r/min idle engine operation and (b) bucket impact noise.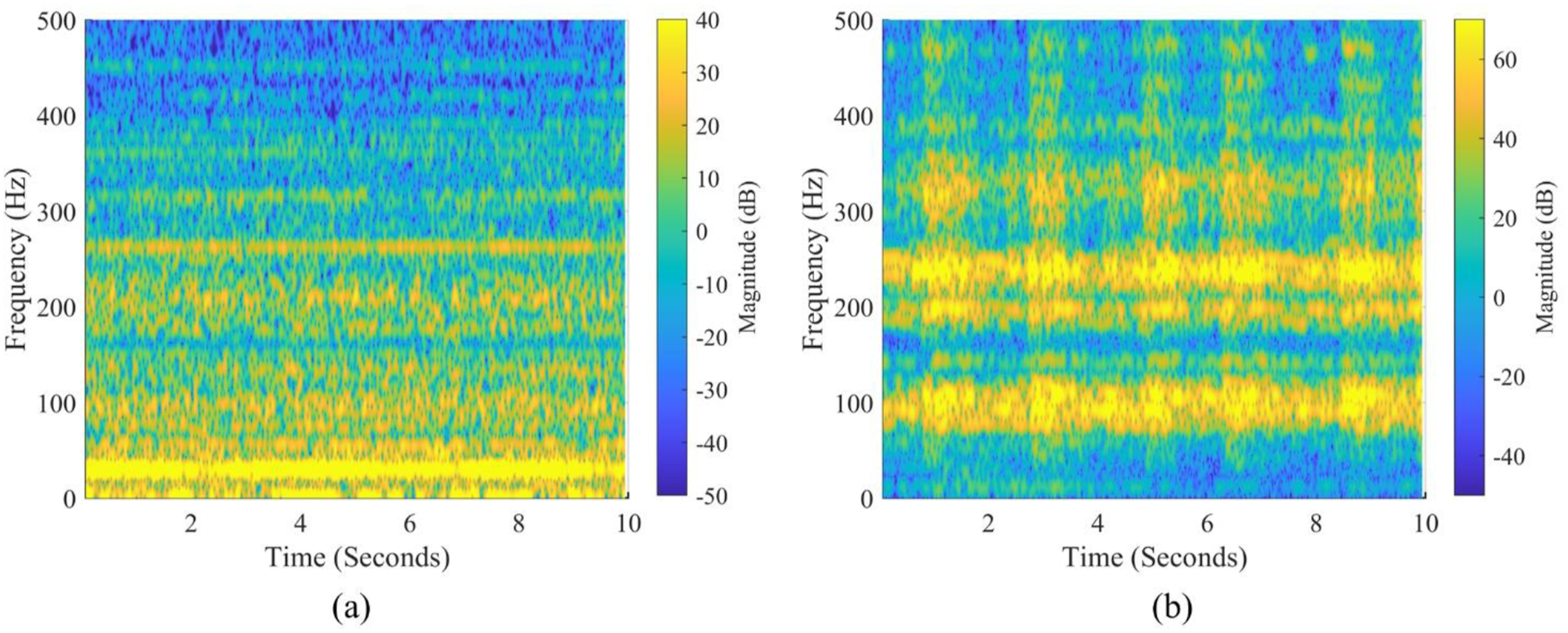
In contrast, the bucket impact noise occurs during operations such as soil emptying. This involved the bucket rotation around the arm linkage. When the bucket reached its maximum angle, it collided with the arm and produced impact noise. Since the bucket and the arm were made of metal, this resulted in impulsive noise from frictional contact. Therefore, bucket impact noise generates a high sound pressure level (SPL) over a wide frequency range within a very short period, with the main noise spectrum predominantly below 2000 Hz.
Laboratory experimental setup to simulate the excavator operating conditions
To experimentally validate the noise control performance inside the excavator cabin, a simulated operating environment was established as shown in Figure 6. The experiment was conducted using the cabin part of the excavator with a single access door. The dimensions of the cabin used in this experiment were 1100 × 1900 × 1750 mm. The schematic of the experimental setup for real-time ANC at the excavator cabin. The internal cabin size was 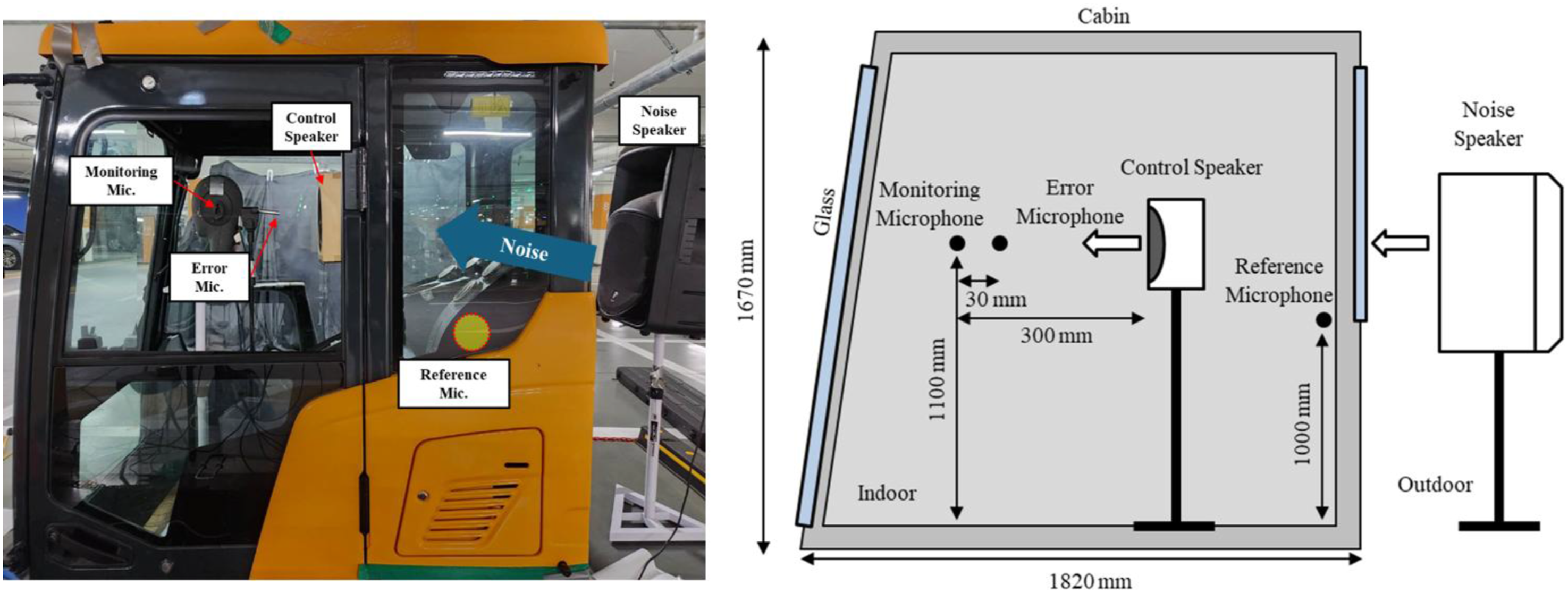
A digital signal processor from dSPACE (MicroLabBox) was used to process the real-time control. The control speaker, MO-08B100, was chosen to effectively reduce noise concentrated in the lower frequency range below 500 Hz, which is main frequency bands of the excavator noise. For the excavator noise was produced by the external speaker (Mackie) to adequately replicate the low frequency and spectral characteristics of the actual excavator noise in the laboratory.
The sound measured by dummy (Head Acoustics HSM V) was used to simulate the noise experienced by the operator. The error and monitoring microphones were positioned 0.27 m and 0.300 m away from the control speaker, respectively. This simulated the microphone attached to the headrest of the driver seat. The ANC system forms a zone of quiet (ZoQ) around the error microphone within a radius 
Secondary path modeling for cabin noises
The accuracy of secondary path estimation significantly affects the effectiveness of the noise cancellation signal, and thus the overall performance of the ANC system. The actual experiments presented challenges due to the instability and time-varying characteristics of these paths. Therefore, an approximation of the estimated paths was necessary.
In this study, the secondary path inside the cabin was estimated using a pseudo-random binary sequence (PRBS). The flat spectrum characteristic from random signals allowed the assessment of the transmission path across the entire frequency range. This process involved emitting a random sound through the secondary path and measuring the system response with an error microphone. The impulse response of the secondary path was then derived by calculating the correlation between the input and output responses. The results of the path estimation measurements conducted within these cabins are shown as Figure 7. PRBS-based secondary path modeling method assumes a static secondary path, which may lead to reduced accuracy under dynamic acoustic conditions. This method was selected in this study due to its low computational complexity, making it suitable for real-time online testing, and emphasizing a lightweight ANC system optimized for the stable cabin environment, which is less affected by external disturbances. (a) The time domain and (b) frequency domain responses of the secondary path estimation inside a excavator cabin by white noise generated by the loudspeaker.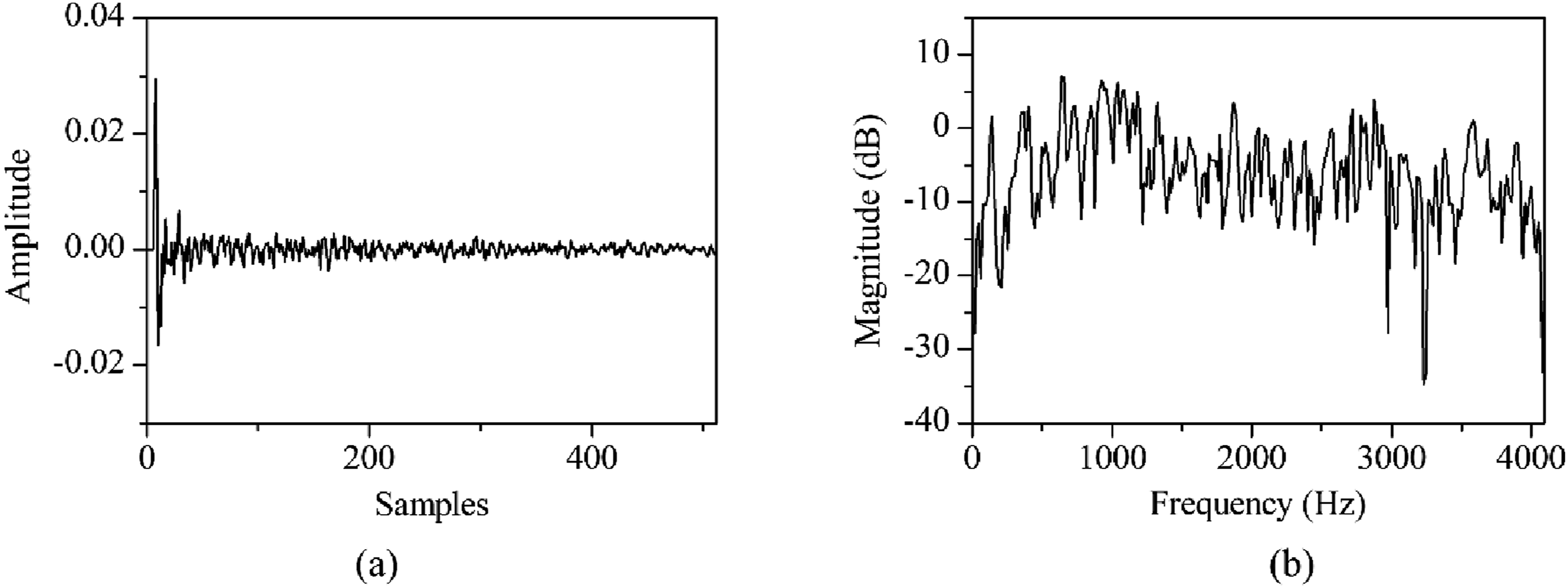
Real-time ANC and performance evaluations
In order to validate the performance of the proposed A-weighted FxLMS algorithm, experiments were conducted. The bucket impact noise was controlled based on overall dB(A) up to 500 Hz. The overall noise level was calculated for use as the evaluation index:
The impulsive noise control performance
Figures 8 and 9 show the noise level reduced by the ANC for the bucket impact noise. The sounds measured for the ANC experiments to evaluate and compare the performance of FxLMS and the proposed ANC algorithm on the bucket impact noise The results in the time domain to evaluate and compare the performance of FxLMS, with step-size PSD from ANC measurements of (a) the excavator idle engine noise and (b) bucket impact noise.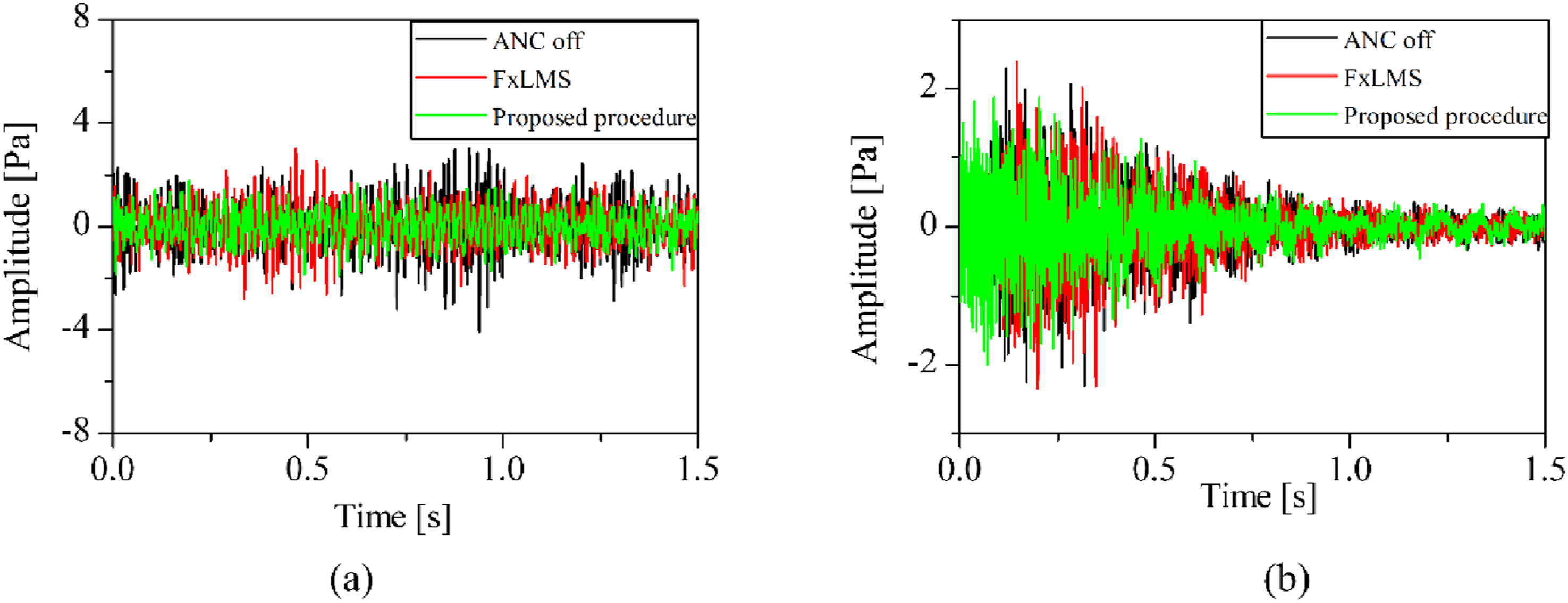
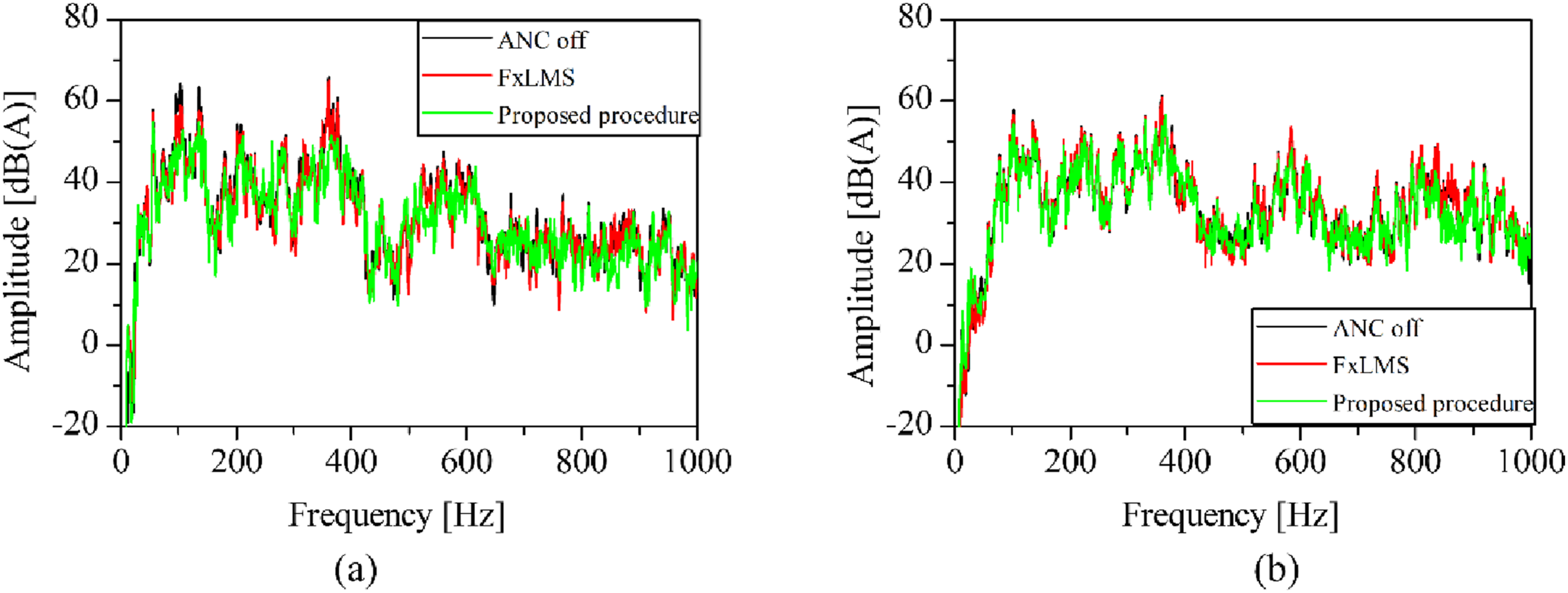
Figure 9 presents the ANC performance displayed as PSD. For idle engine noise, the harmonics corresponding to the engine’s RPM were clearly visible in the spectrum, with the sound energy concentrated in these harmonics, primarily below 650 Hz. The noise control performance using FxLMS showed effectiveness around the 100 Hz range but showed limited performance in the 300–400 Hz range. In contrast, the proposed algorithm demonstrated satisfactory noise reduction in both frequency ranges.
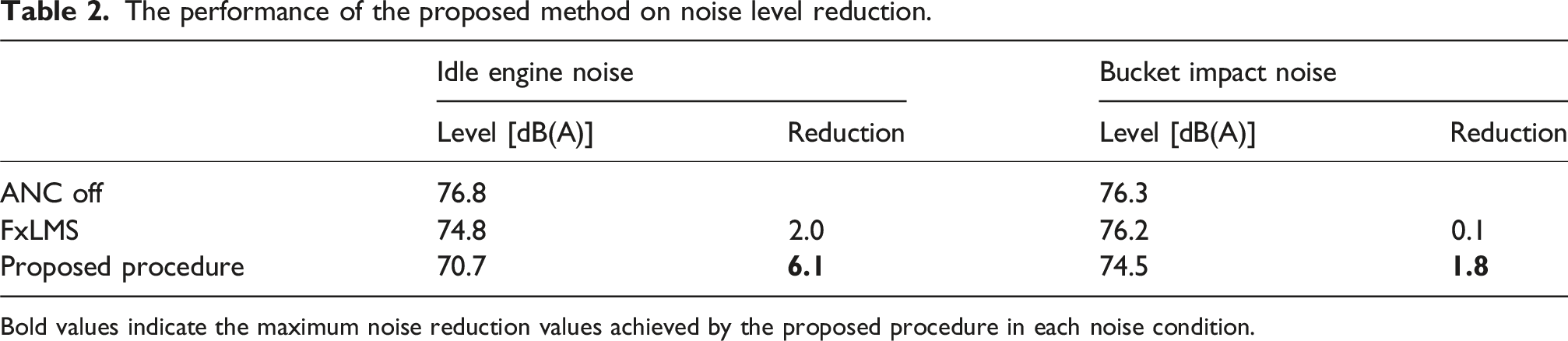
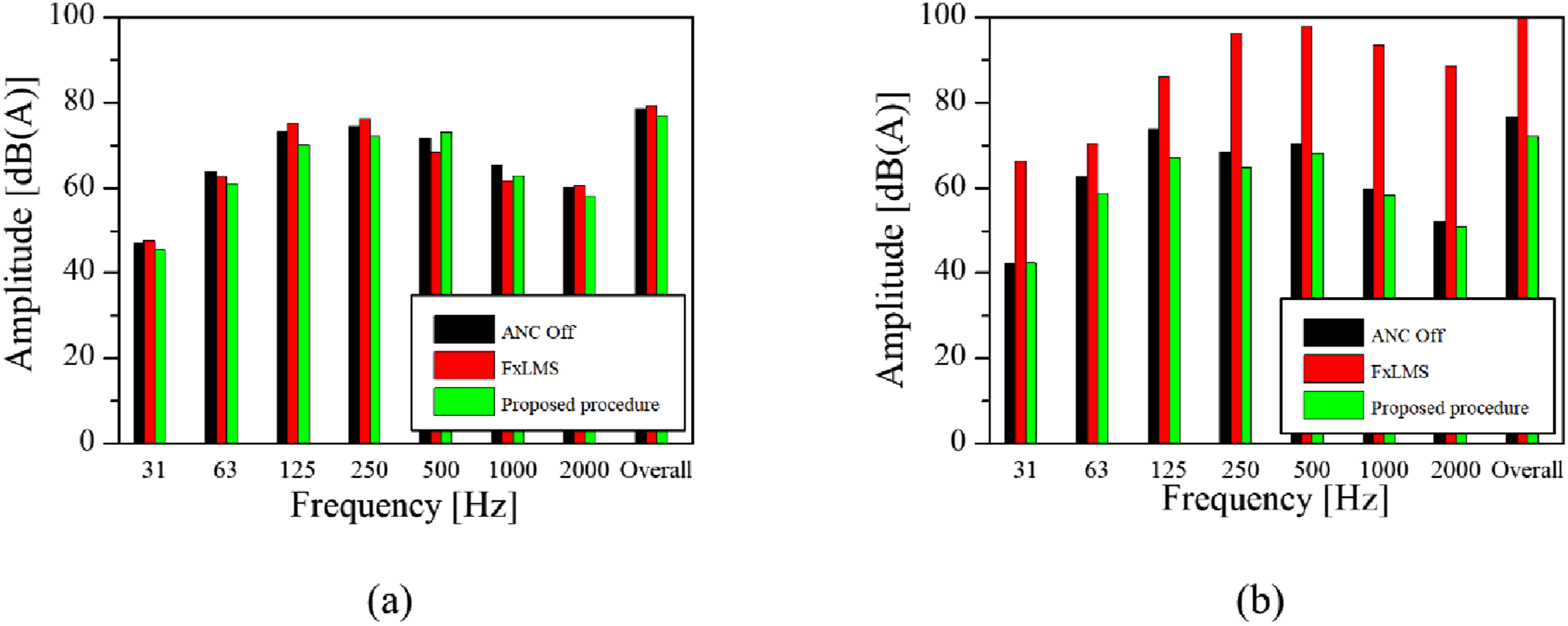
For bucket impact noise, the spectral shape is similar to that of idle engine noise, as the noise is generated by the bucket movement and the simultaneous engine operation. The difference was shown in the addition of the broadband noise, particularly in the 700–1000 Hz range. In this case, the FxLMS algorithm not only fails to control the newly arising noise bands but also loses control over the idle engine noise below 400 Hz. The proposed algorithm exhibited robust noise reduction capabilities even in the presence of sudden impulsive noises. This advantage of the proposed algorithm was further confirmed in Figure 8, where a significant reduction in amplitude for impulsive sounds was clearly observed. The overall dB(A) control performance is summarized in Table 1. In addition, the main bands of noise reduction are represented by the octave bands as shown in Figure 10. The reduction performance was observed in the frequency range from 100 to 1000 Hz, which is achieved by the use of the human perception characteristics during data processing (Table 2). Comparison of noise reduction performance distribution by frequency band for the results in octave bands for (a) idle engine noise and (b) bucket impact noise. The performance of the proposed method on noise level reduction. Bold values indicate the maximum noise reduction values achieved by the proposed procedure in each noise condition.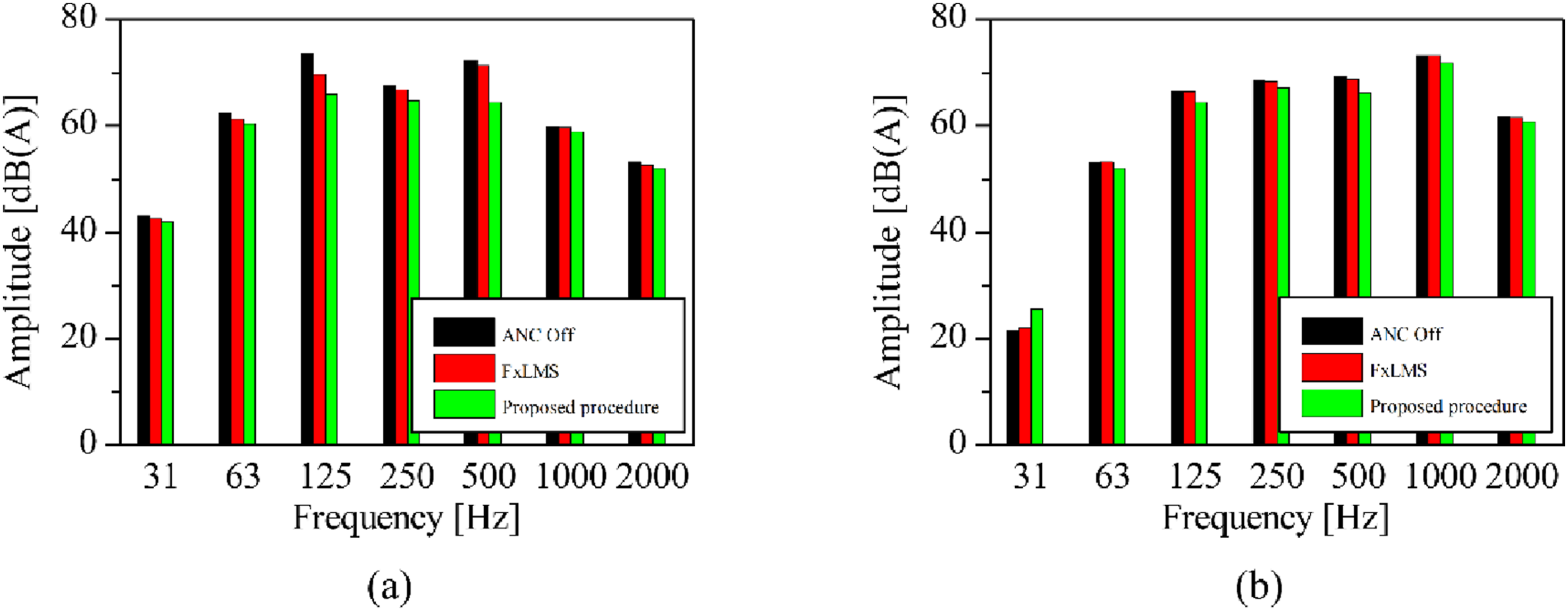
Robustness of control performance to unexpected interference
In actual excavator operating environments, unexpected noise or changes in the sound field within the cabin interfere with the ANC system performance. To simultaneously introduce both types of interference, the opening and closing of the cabin door was given during ANC operations. This change in the acoustic environment significantly impacts the secondary paths, potentially causing the control system to diverge. To simulate this situation, we evaluated the robustness of each algorithm by opening and closing the cabin door while controlling the idle engine noise (Figure 11). The sounds measured during the ANC experiments to evaluate the robustness of the proposed algorithm for excavator engine idle noise under conditions of (a) cabin door open and (b) cabin door closed.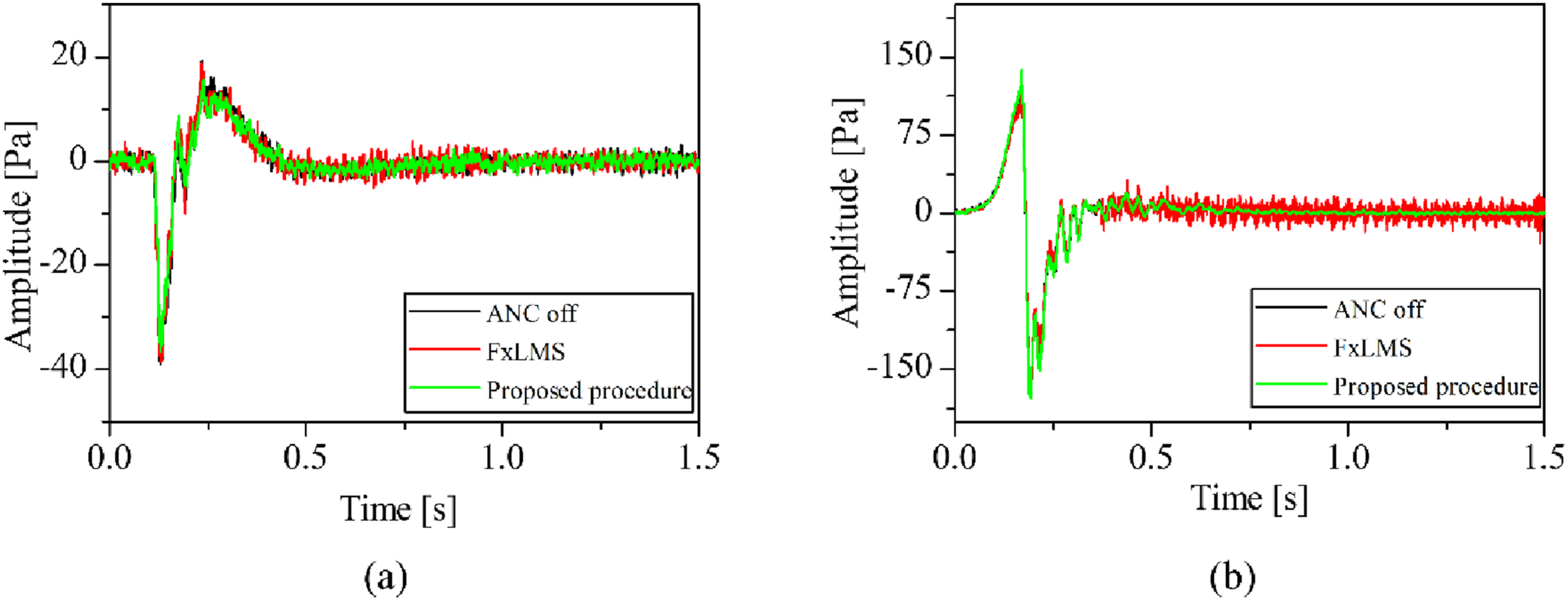
From opening and closing the door, the low frequency (<5 Hz) impulsive sounds were generated together with the idle engine noise. The time domain responses were compared, showing that the noise from closing the door was greater than that from opening. The FxLMS algorithm temporarily lost control immediately after the door was opened but regained convergence at 1.0 s. However, after the door was closed, the system diverged and completely lost control. In Figure 12, with the door opening, the system diverged at the 150 Hz and 300 Hz bands. With the door closing, divergence occurred across the entire frequency range. The proposed algorithm maintained stability in both scenarios and showed noise reduction performance in the entire frequency spectrum. With the FxLMS algorithm, noise levels increased due to divergence. With the proposed algorithm, noise reductions of 1.5 dB(A) and 4.5 dB(A) were achieved during transient situations of the door opening and closing, respectively. This improvement can be explained by the underlying control mechanism of the proposed method. Unlike the conventional FxLMS algorithm, which uses a fixed step-size and is highly sensitive to abrupt error fluctuations, the proposed approach adopts a convex combination structure that adapts step-size based on transient acoustic variations while maintaining stability in steady-state conditions. This structure enables dynamic adjustment of the adaptation rate in response to impulsive disturbances, effectively preventing divergence. Additionally, the incorporation of A-weighting emphasizes perceptually significant frequencies, further enhancing control stability and performance across the full spectrum. As a result, the algorithm demonstrates not only improved noise attenuation but also robust convergence behavior under non-stationary and high-impact acoustic events (Figure 13). Sound level of excavator engine idle noise measured under conditions of (a) cabin door open and (b) cabin door closed. Comparison of noise reduction performance distributions by 1/1 octave frequency band for (a) door opening and (b) door closing with the idle engine noise.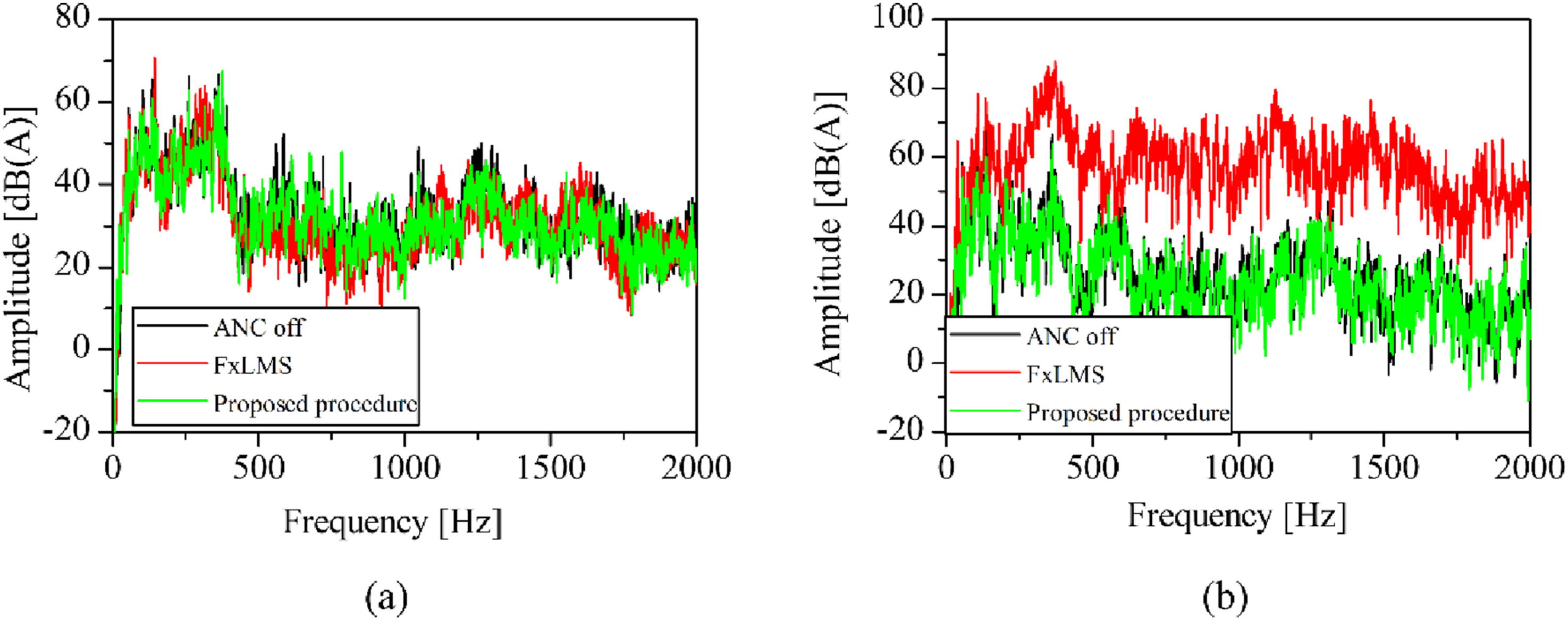
Discussion
Computational complexity comparison with other recent AINC algorithms.

The PRBS-based secondary path modeling employed this research offers low computational complexity suitable for real-time applications. However, its assumption of a static secondary path presents limitations in dynamic acoustic environments. Therefore, it may not be suitable in unstable and transient environments (e.g., outdoor conditions). Real-time secondary path estimation methods would partially alleviate inaccuracies arising from environmental variations. Moreover, the proposed SαS model, although effective in representing heavy-tailed impulsive noise, assumes stationarity. Real-world impulsive noises often exhibit non-stationary characteristics, suggesting the need for adaptive or time-varying noise modeling in future works. Incorporating such adaptive techniques could further enhance the robustness and real-world applicability of the ANC system, maintaining simplicity while adapting intelligently to changing acoustic conditions.
One limitation of this study is that the evaluation of the proposed AINC method primarily focused on computational efficiency, without a direct comparison of control performance against other established AINC techniques, such as Volterra filtering or deep learning-based controllers.
Future research will involve a systematic performance comparison among various AINC algorithms under identical operating conditions. Such an investigation is expected to provide deeper insights into the trade-offs between control accuracy, robustness, and computational efficiency, and to further validate the proposed algorithm’s effectiveness in diverse acoustic environments.
Conclusions
This study presents effective control methodology for reduction of impulsive noise characterized by significant non-Gaussianity. The error between the actual secondary path and its estimation was minimized for efficient active control. Integration of a normalized LMS prevented divergence in response to large-magnitude single samples, after utilization of a Euclidean norm term to calculate the convergence coefficient. Additionally, this algorithm applied the VSS concept, suitable for volatile noise environments, by forming a mixed step-size through the convex combination of constant and transient step-size parameters. In addition, the A-weighted filtering concept was introduced to consider human auditory characteristics, thereby enhancing the algorithm performance. An experimental setup was built to simulate the actual in-cabin environments. The sound inside the cabin was measured using a head equipped with microphones inside its ears, to simulate actual environments for evaluation of noise reduction performance. The results demonstrated that the proposed ANC algorithm outperformed existing algorithms in both steady-state and impulsive noise scenarios, as evidenced by its superior performance in noise level measurements, particularly in controlling bucket impact noise. The robustness of the proposed algorithm was highlighted as it maintained stability even in situations where unwanted noise intrusions or changes in the secondary path destabilized the ANC system. These advancements indicated significant potential for enhancing noise control and user convenience in heavy machinery like excavators.
Footnotes
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by Korea Institute of Planning and Evaluation for Technology in Food, Agriculture, Forestry (IPET) through Development of 110 kW class large tractor based on eco-friendly hydrogen fuel cell (No. 322047051HD0e0), funded by Ministry of Agriculture, Food and Rural Affairs (MAFRA) and HD Hyundai XiteSolution Co., Ltd.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.