
Abstract
In the conventional hybrid active noise control (CHANC) algorithm, the filtered-x least mean square (FXLMS) algorithm is used in both feedforward and feedback structures. However, the FXLMS algorithm does not process the reference signal and the error signal before updating the weight vector, which leads to the inadequate robustness of the CHANC algorithm in the impulsive noise environment. To solve this problem, the maximum versoria criterion is incorporated into the HANC (MVC-HANC) algorithm in this paper. Firstly, the MVC-HANC algorithm employs a novel nonlinear function to compress the error signal. Secondly, the proposed algorithm uses the modified sigmoid function to constrain the reference signal. To further improve the noise attenuation performance, the MVC-HANC algorithm uses a novel exponential function to adjust the step-size adaptively. Simulation and experiment results demonstrate that the proposed algorithm has the better attenuation performance than the conventional HANC algorithm.
Introduction
The noise emitted by the industrial products seriously affects people’s normal life. In the past, the passive noise control (PNC) technology has been widely used and achieved good noise reduction performance. 1 However, the PNC technology has significant limitations when dealing with low-frequency noise. Active noise control (ANC) technology has good noise reduction ability for the low-frequency noise. 2 Most of the ANC algorithms used nowadays are adaptive algorithms, and non-adaptive algorithms are rarely used anymore. The ANC algorithms used in this paper are the adaptive algorithms.
The principle of the ANC system is that the loudspeaker emits a secondary sound; the phase of this secondary sound is opposite to the primary noise, so as to achieve the purpose of noise reduction. 3 The ANC algorithm can be divided into two structures, one is the feedforward structure and the other is the feedback structure. In recent years, many scholars combined the feedforward structure with the feedback structure to form a hybrid system. We refer to this hybrid system as a conventional hybrid ANC (CHANC) algorithm.
Based on the CHANC algorithm, Akhtar MT developed a new HANC algorithm, which we call AMHANC algorithm in this paper. 4 The AMHANC algorithm uses the third filter to improve the attenuation performance. Based on the AMHANC algorithm, Trideba proposed a new HANC (T-HANC) algorithm, the T-HANC adopts the joint-optimized normalized least mean square (JO-NLMS) algorithm to update the weight vector of the third filter. 5 Mokhtarpour proposed a self-tuning HANC algorithm, this algorithm can adaptively adjust the step-size. 6 Jiang proposed a novel adaptive step-size HANC algorithm, the parameters in this algorithm can be adjusted by the intelligent algorithm. 7
In the CHANC algorithm, the filtered-x least mean square (FXLMS) algorithm is usually applied to the feedforward and feedback structures. 8 When it deals with the impulsive noise, the attenuation performance have great limitations. 9 Many scholars have developed other ANC algorithms to improve the robustness of the FXLMS algorithm.
The error signal is often compressed before the weight vector is updated. The filtered-x least mean M-estimate (FXLMM) algorithm has tried to compress the error signal. 10 The filtered-x logarithmic error LMS (FXlogLMS) algorithm uses the logarithmic function to compress the error signal. 11 The general step-size normalized FXLMS (FXgsnLMS) algorithm adopts a smooth compression curve to compress the error signal. 12 The filtered-x least mean p-power (FXLMP) algorithm and the filtered-x least mean absolute deviation (FXLMAD) algorithm form a new error signal processing method by modifying the cost function.13,14 The filtered-x maximum versoria criterion (FXMVC) algorithm proposes a new error signal compression function.15,16 The algorithm proposed in this paper is based on this algorithm.
Constraining the reference signal can significantly improve the robustness of the algorithm. The threshold based FXLMS (Th-FXLMS) algorithm constrains the reference signal, the noise attenuation performance is improved. 17 The weight-constrained FXLMS (CFXLMS) algorithm constrains the weight vector, which can achieve the same noise attenuation effect. 18
Many variable step-size functions are proposed, which can improve the attenuation performance. The normalized step-size FXLMS (NSS-FXLMS) algorithm proposes a normalized step-size method. 19 Based on the NSS-FXLMS algorithm, the convex-combined step-size (CCSS) based filtered-x generalized normalized LMP (CCSS-FXGNLMP) algorithm considers the energy of the reference signal and the error signal at the same time, and proposes a new variable step-size strategy. 20 The filtered-x maximum correntropy criterion (FXMCC) algorithm and the filtered-x least mean kurtosis (FXLMK) algorithm implement the variable step-size strategy by modifying the cost function.21,22 Other variable step-size strategies can also achieve the effect of improving noise attenuation performance.23,24 Based on the summary of the variable step-size strategies, a novel variable step-size function is proposed in this paper.
The motivation for this paper is that the CHANC algorithm does not achieve satisfactory result in attenuating impulsive noise. To solve the problem, the MVC-HANC algorithm is proposed in this paper. The proposed algorithm uses a novel function to compress the error signal. Meanwhile, the MVC-HANC algorithm adopts a modified sigmoid function to constrain the reference signal. To further improve the noise attenuation performance, an adaptive step-size function is applied to the algorithm. The main contributions of the proposed algorithm can be summarized as follows: (1) The MVC-HANC algorithm uses a novel nonlinear function to compress the error signal, the compression strength of the error signal can be adjusted. (2) The proposed algorithm adopts a modified sigmoid function to constrain the reference signal. (3) The proposed algorithm uses an adaptive step-size function to adjust the step-size adaptively.
Conventional HANC algorithm
The conventional HANC (CHANC) algorithm is a classic hybrid algorithm. Figure 1 shows the block diagram of the CHANC algorithm. In Figure 1, x1(n) and x2(n) represent the reference noises in the feedforward and feedback structures, respectively. P(z) is the transfer function of the primary path, its transfer path is the distance between the primary sound source and the error microphone. d(n) is the primary noise collected by the error microphone. W1(z) and W2(z) represent the feedforward and feedback adaptive filters, respectively. y(n) is the output signal of the whole algorithm. y
s
(n) is the output signal y(n) collected by the error microphone. e(n) is the error signal, it is obtained by the mutual cancellation of d(n) and y
s
(n). S(z) is the transfer function of secondary path, Block diagram of the conventional HANC algorithm.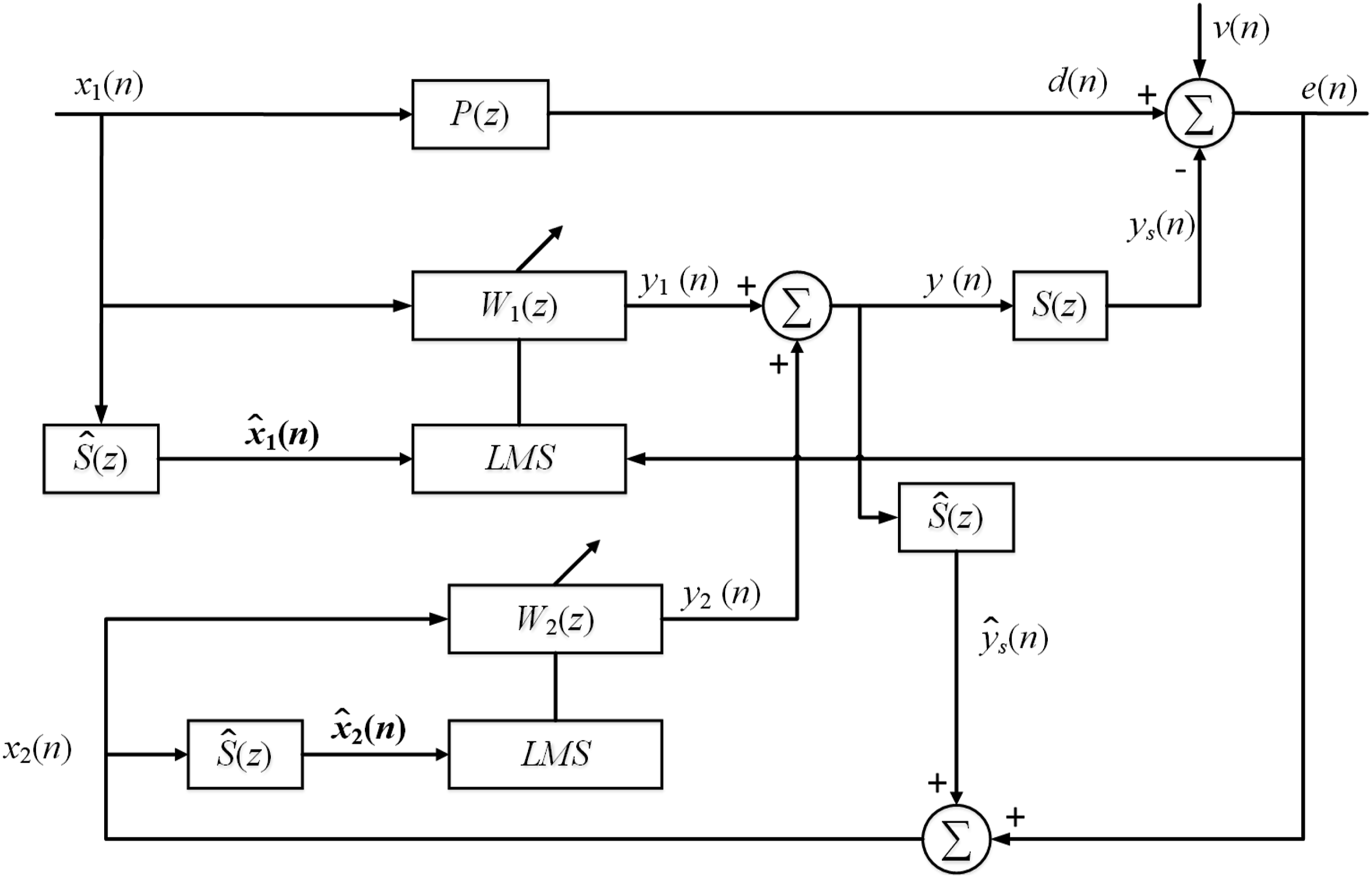
In the CHANC algorithm, the output signals of the feedforward and feedback structures can be written as


The output of the whole algorithm can be written as

The expression of the error signal e(n) can be written as

The expression of x2(n) can be written as

The update formula of the


As shown in equations (6) and (7), the values of e(n) and
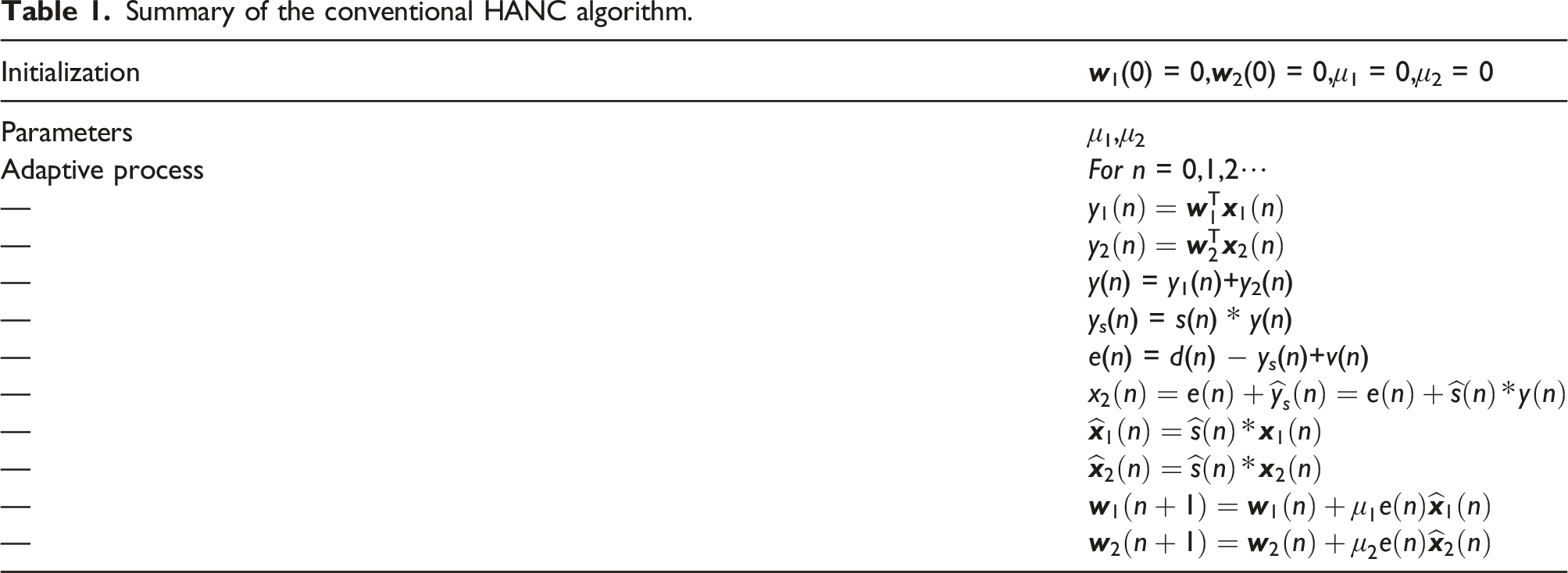
Summary of the conventional HANC algorithm.
The proposed MVC-HANC algorithm
FXMVC algorithm
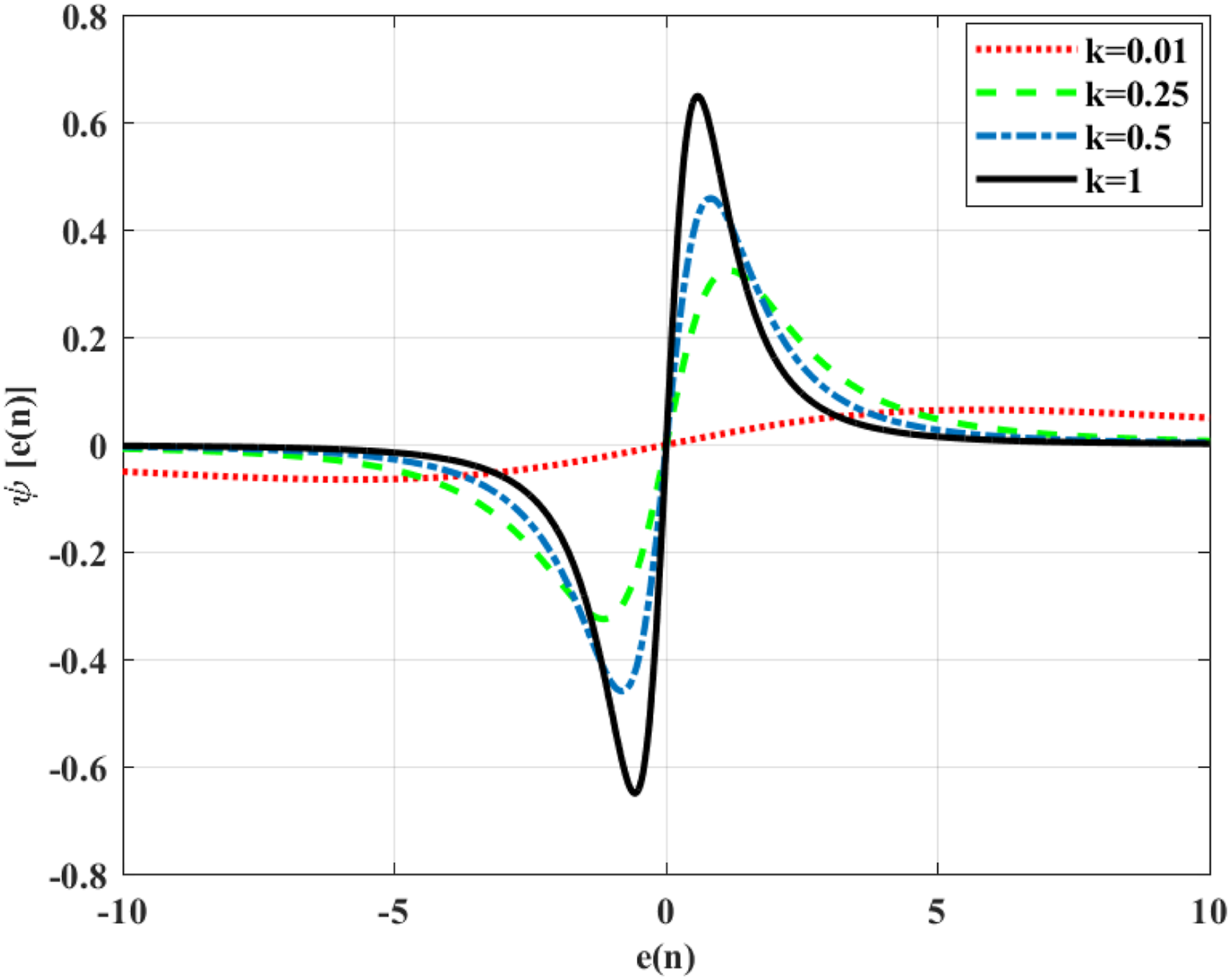
The cost function of the FXMVC algorithm can be written as


Then, the weight vector update equation of the FXMVC algorithm can be written as The characteristic curves of the function ψ(e(n)) with different factor k.


Constraint function
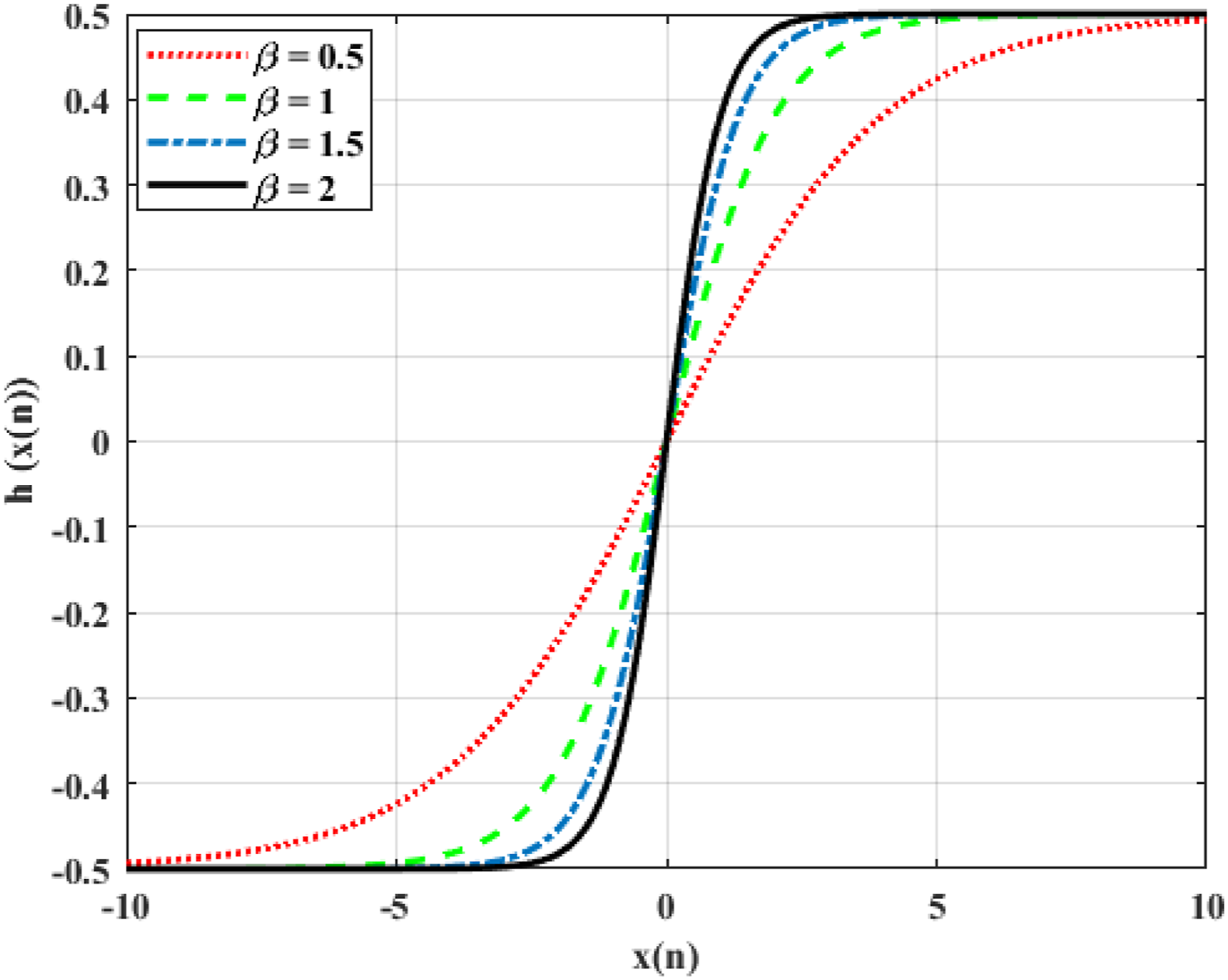
To further improve the noise attenuation performance, we adopt a modified sigmoid function to constrain the reference signal. Equation (13) shows the modified sigmoid function. The characteristic curves of the function h(x(n)) with different parameter β.
Adaptive step-size function
When the ANC algorithm encounters impulsive noise, the algorithm is prone to divergence. In order to prevent divergence, a smaller step-size is generally set for the ANC algorithm. However, when the step-size is small, the convergence rate of the ANC algorithm will decrease. Therefore, we hope that when the impulsive noise appears, the step-size will become smaller to prevent the algorithm from diverging, and when there is no impulsive noise, the step-size becomes larger to improve the convergence rate. Based on this idea, we propose a novel variable step-size equation. Equation (14) shows the variable step-size equation.
As shown in equation (14), when the reference signal x(n) and the error signal e(n) become larger, the step-size μ(n) becomes smaller. According to equations (6) and (7), this variable step-size formula can avoid the weight vector divergence during the weight vector update. Furthermore, the variable step-size formula can be changed by adjusting the parameters.
MVC-HANC algorithm
Figure 4 shows the block diagram of the MVC-HANC algorithm, the calculation process of the proposed algorithm is as follows. Block diagram of the MVC-HANC algorithm.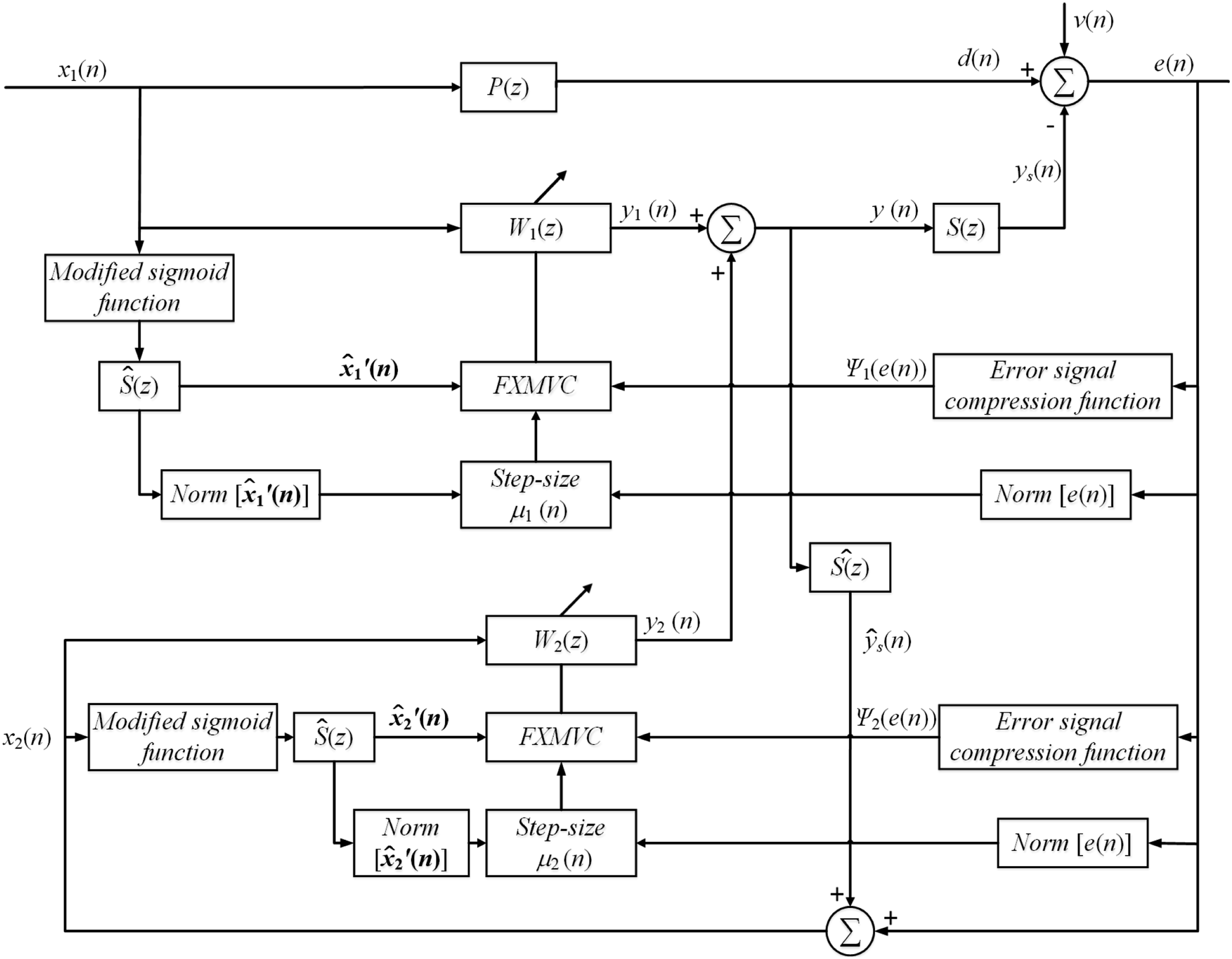
The output signals of the feedforward and the feedback structures can be written as

The output signal of the whole algorithm is
The error signal can be written as
We need to calculate the reference signal of the feedback structure


Secondly, we constrain the reference signal by the formula h(∙)

Thirdly, we propose the adaptive step-size formula

Finally, the update equation of the weight vector can be written as

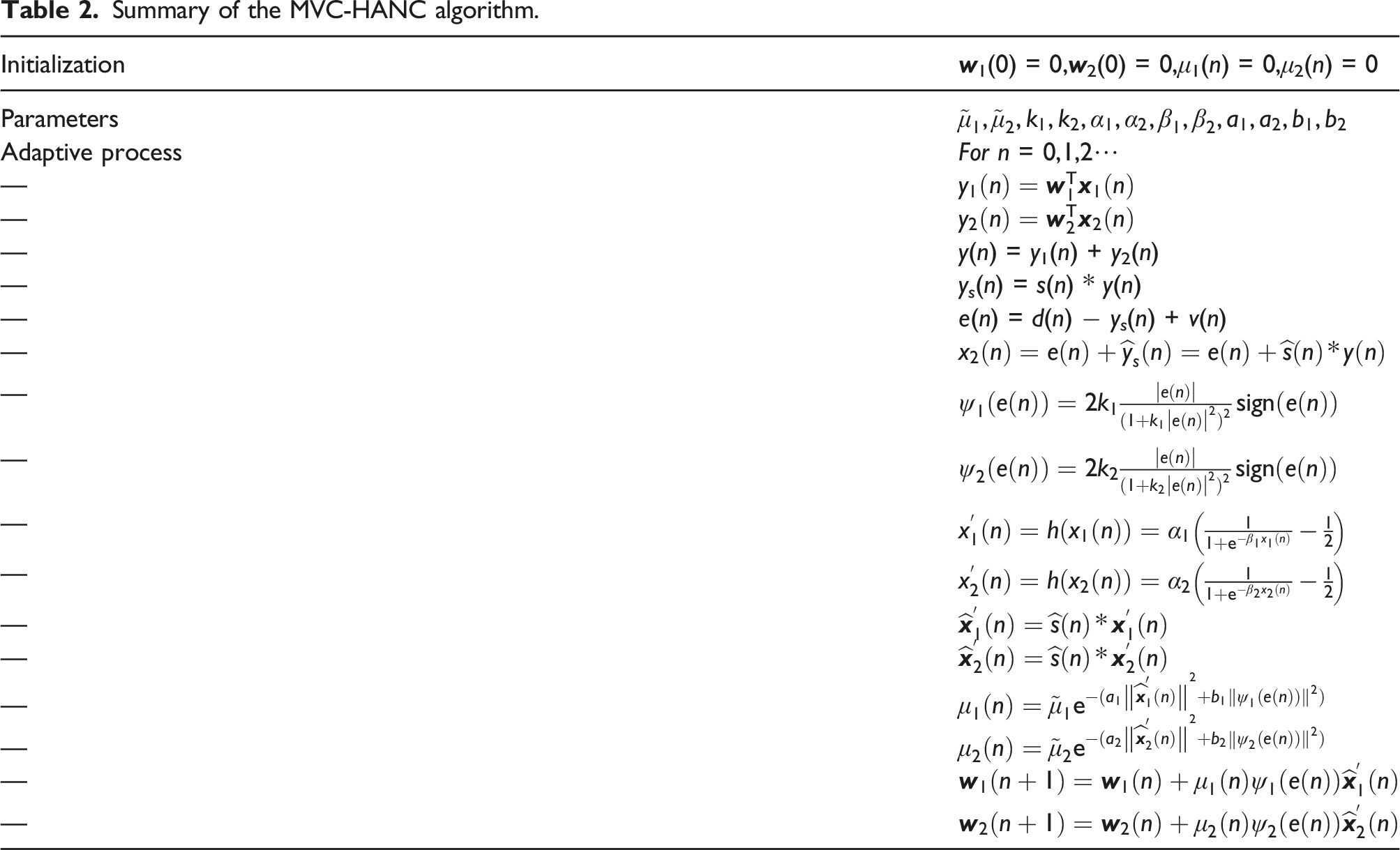
Summary of the MVC-HANC algorithm.
Stability analysis
The step-sizes in the feedforward and feedback structures of the MVC-HANC algorithm need to be controlled within a reasonable range. We first focus on the step-size range in the feedforward structure. Define 
Define the mathematical expectation of ‖
Then,
The difference between φ(n+1) and φ(n) is

The equation (31) can be rewritten as

It means
Combining equation (24) and equation (35), we can get
The equation (36) shows the boundary of the basic step-size 

Similarly, we can get the boundary of the basic step-size 
Complexity analysis
Summary of the computational complexity analysis.

As shown in Table 3, the FXLMS algorithm has the lowest computational complexity, but its noise attenuation performance is worse compared with other algorithms mentioned in this paper. In the subsequent simulations and experiments, it can be seen that the FXLMS algorithm provides the worse attenuation performance, and provides the worst attenuation performance in Experiment B and Experiment C. The MVC-HANC algorithm proposed in this paper has the highest computational complexity. The MVC-HANC algorithm is more than FXLMS algorithm L1+3L2+M+31 multiplications and L1+3L2+M+7 additions. The attenuation performance of the MVC-HANC algorithm is the best among these four algorithms. Therefore, its computational complexity increase is acceptable compared to its noise attenuation performance. If the number of channels is drastically increased, the MVC-HANC algorithm still has the highest computational complexity and the best noise attenuation performance when using the same number of channels.
Simulation results
In this section, the computer simulations are conducted. The physical system represented in the simulation results is the room. The data of acoustic paths need to be obtained in the simulation.
The primary path P(z) and the secondary path S(z) are modeled as FIR filters, the length of the filters is 128. The estimated secondary path Frequency response of the primary path and the secondary path: (a) magnitude response and (b) phase response.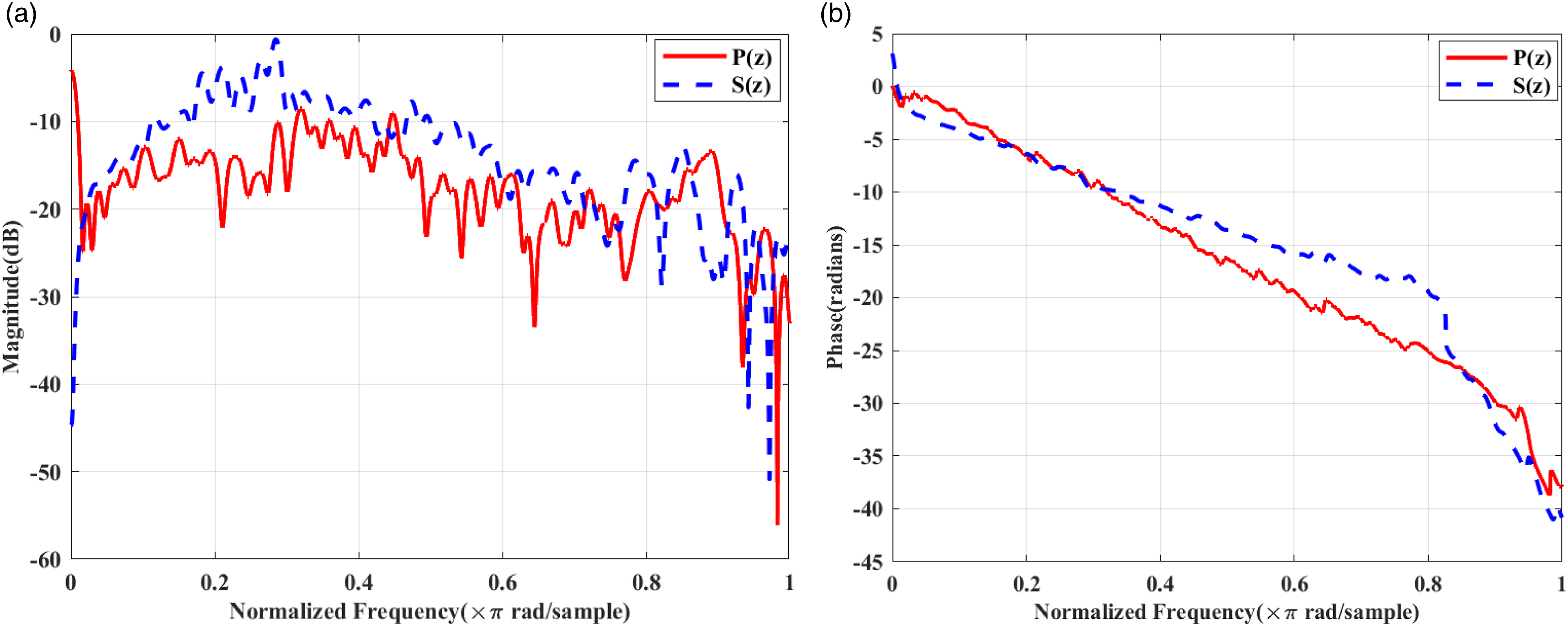
The averaged noise reduction (ANR) is used to validate the attenuation performance of the ANC algorithms. The calculation formula of the ANR is

The reference noise is the impulsive noise generated by MATLAB. The impulsive noise conforms to the SαS distribution. In most cases, the α range of the impulsive noise is set as (1, 2). We choose three typical cases to calculate the simulations. Firstly, we set α = 1.6, this case represents the mild impulsive noise. Secondly, we set α = 1.4, this case represents the medium impulsive noise. Thirdly, we set α = 1.2, this case represents the heavy impulsive noise. The sampling frequency is set as 8000 Hz.
Simulation A
Summary of the step-sizes used in Simulation A.

In Table 4, μ1 and μ2 represent the step-sizes in the feedforward and feedback structures, respectively. μ
h
represents the step-size in the third filter. As for the MVC-HANC algorithm,
Figure 6 shows the ANR results. As shown in Figure 6, the AMHANC algorithm has the worst convergence rate, the convergence rate of the FXLMS algorithm is better than the AMHANC algorithm, the CHANC algorithm has better convergence rate than the FXLMS algorithm, and the MVC-HANC algorithm proposed in this paper has the best convergence rate. The CHANC algorithm has the worst steady-state performance, the ANR result of the CHANC algorithm is −2.7 dB at iterations 8.0×104. The MVC-HANC algorithm has the best steady-state performance, the ANR result of this algorithm is −3.5 dB in the final stage of the iterations. ANR curves for the Simulation A.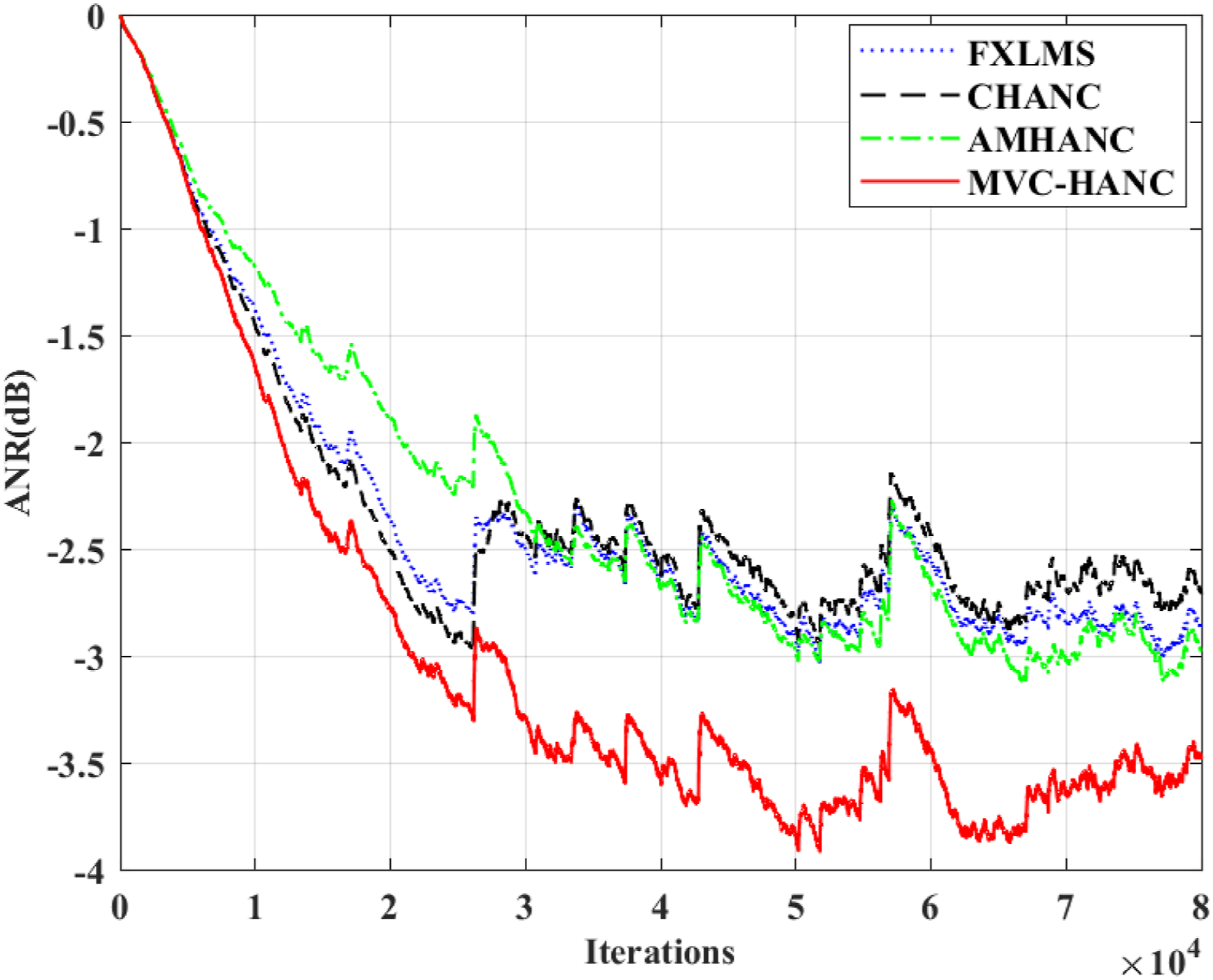
The results show a 0.8 dB improvement for steady-state performance of the MVC-HANC algorithm compared to the CHANC algorithm. The improvement for steady-state performance is acceptable. Firstly, the references can demonstrate that the algorithms proposed by other scholars also have limited improvements for the impulsive noise.27–29 Secondly, in order to ensure that the ANC algorithms converge without divergence, the ANC algorithms have the smaller step-size setting when attenuating impulsive noise compared to attenuating steady-state noise, Thirdly, the appearance of impulsive noise is random; therefore, the algorithms tend to have better noise attenuation performance during the iterative process compared to the performance in the final stage of the iterations. We need to examine the whole iteration of the ANC algorithm to evaluate its noise attenuation performance.
Simulation B
Summary of the step-sizes used in Simulation B.

Figure 7 shows the ANR curves. As shown in Figure 7, the FXLMS algorithm, the CHANC algorithm, and the AMHANC algorithm have the same attenuation performance, the ANR curves of the three ANC algorithms are almost coincident, the ANR results of these three algorithms are −1.4 dB at iterations 8.0×104. The attenuation performance of the MVC-HANC algorithm is best compared with other three algorithms, the ANR result of the MVC-HANC algorithm is −2.2 dB in the final stage of the iterations, it is 0.8 dB lower than other three algorithms. For the same reasons as in Simulation A, the ANR result is acceptable. ANR curves for the Simulation B.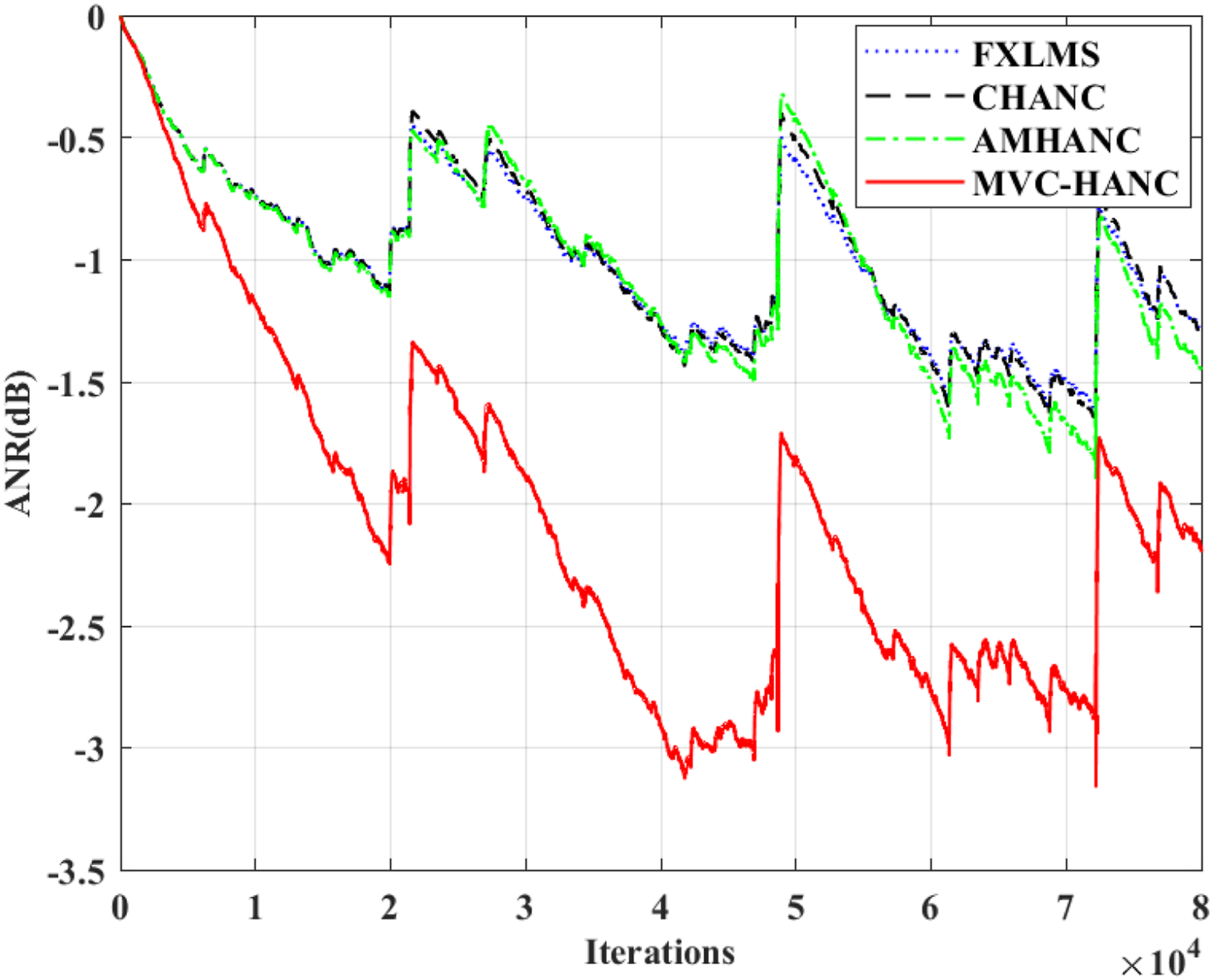
Simulation C
Summary of the step-sizes used in Simulation C.

Figure 8 shows the ANR curves. As shown in Figure 8, the FXLMS, CHANC, and AMHANC algorithms have almost the same attenuation performance, the ANR results are −1.2 dB at iterations 8.0×104. The ANR result of the MVC-HANC algorithm is about −2.0 dB in the final stage of the iterations, it is 0.8 dB lower than the three conventional algorithms. For the same reasons as in Simulation A, the ANR result is acceptable. ANR curves for the Simulation C.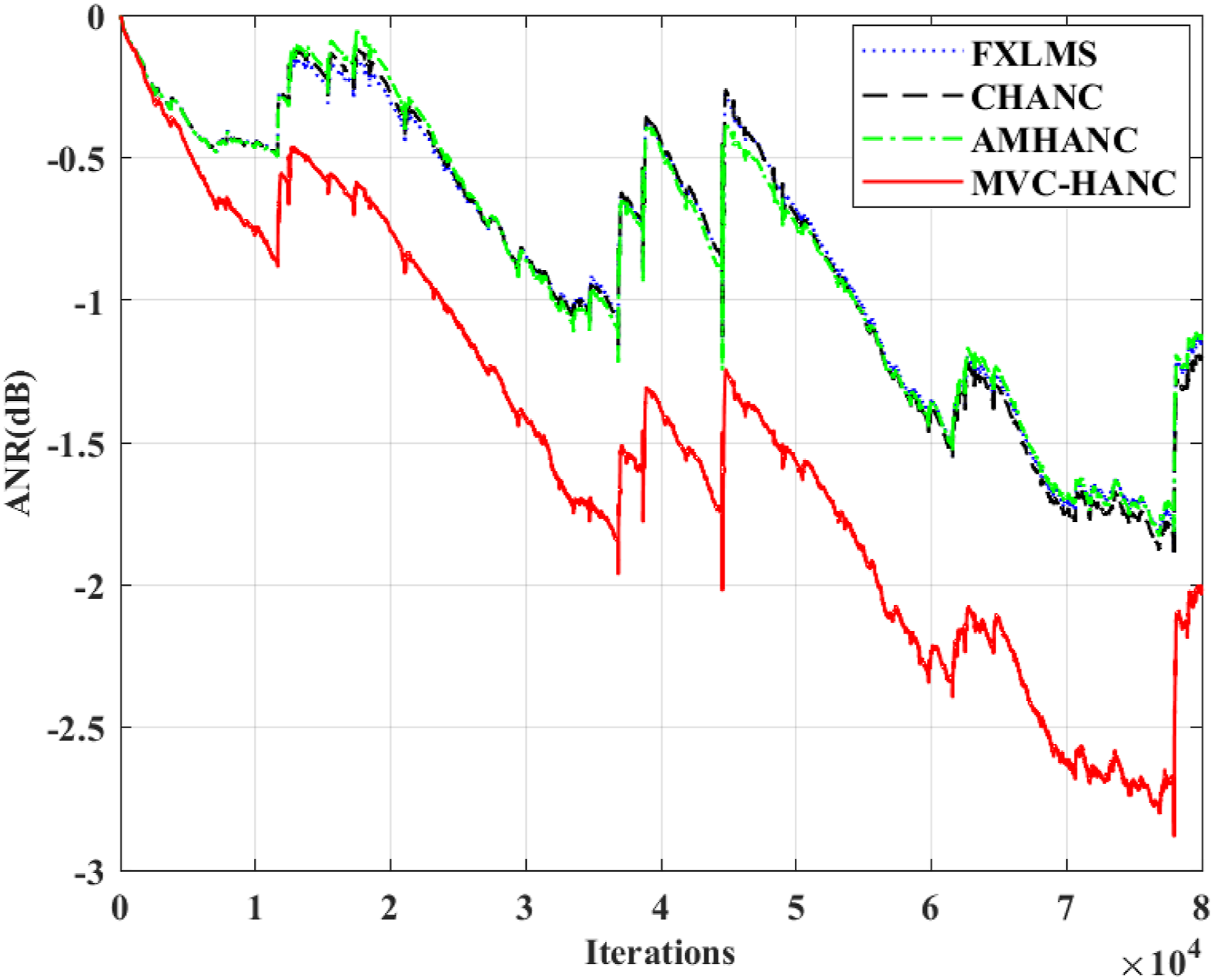
Experiment results
In this section, the primary impulsive noise was measured from a real vehicle going over a bump, the experimental results are based on the laboratory test rig setup. In the following, we will introduce the method of primary noise collection and the arrangement of the test rig.
To collect the primary noise signal, we conducted a vehicle experiment. The vehicle made from China, the test site is an asphalt pavement. When the noise signal was collected, the vehicle was passing through the speed bump at 25 km/h, 30 km/h, and 35 km/h. The sampling rate is 20,480 Hz. To improve the computational efficiency, we resampled the data with a new sampling rate of 8000 Hz. As shown in Figure 9(a), the microphone is placed at the driver’s left ear. As shown in Figure 9(b), the noise data is processed by the computer and the LMS SCADAS Mobile. Figure 10 shows time domain plots of the vehicle interior noise, Figure 11 shows the time-frequency domain plots of the vehicle interior noise. Noise data acquisition equipment: (a) microphone, (b) computer and LMS SCADAS Mobile. The time domain plots of the vehicle noise when the vehicle was passing through the speed bump at: (a) 25 km/h, (b) 30 km/h, (c) 35 km/h. The time-frequency domain plots of the vehicle noise when the vehicle was passing through the speed bump at: (a) 25 km/h, (b) 30 km/h, (c) 35 km/h.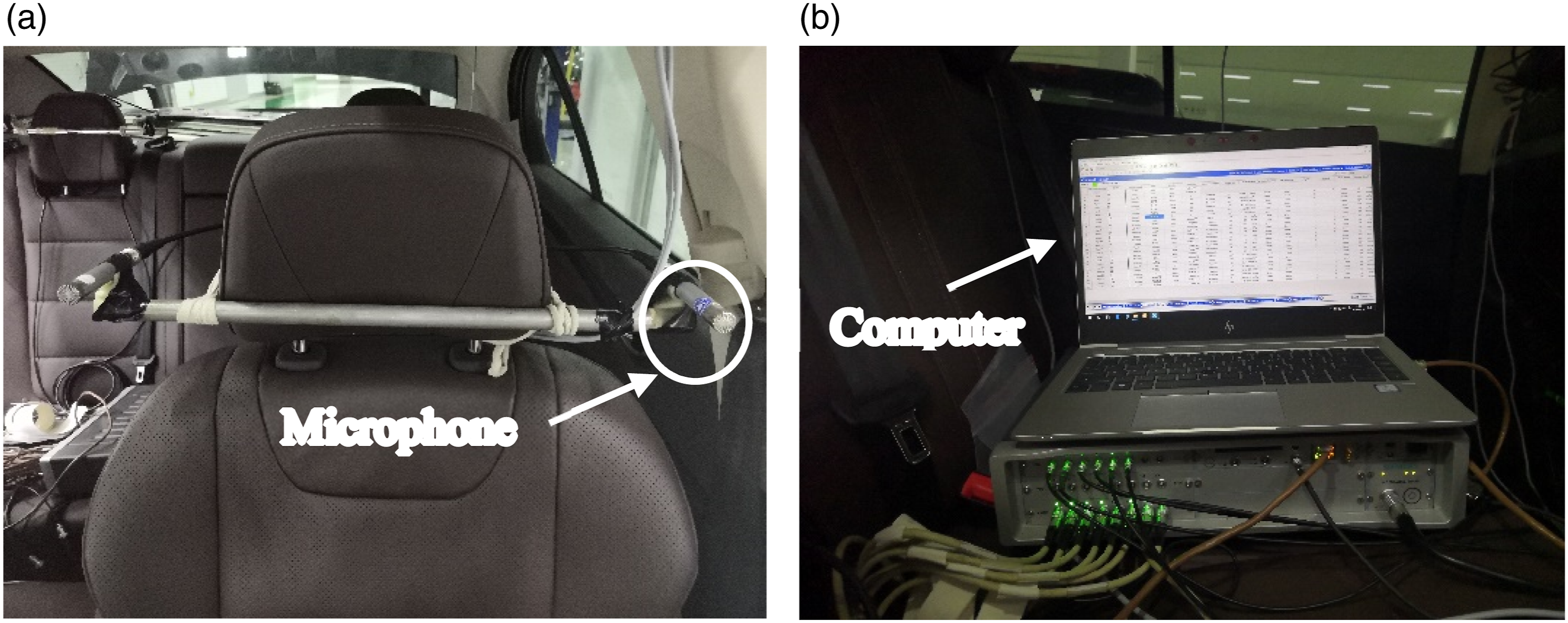
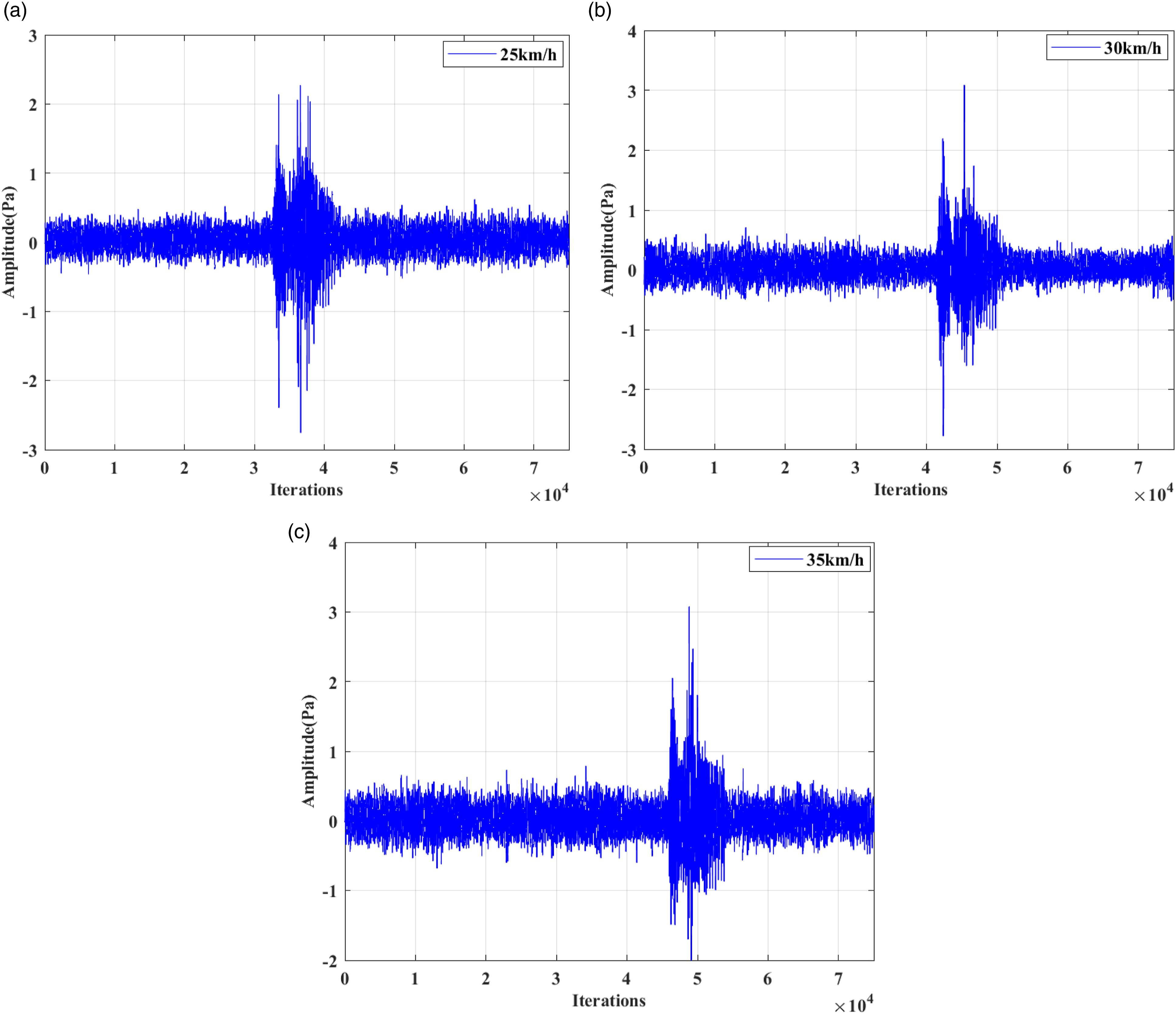
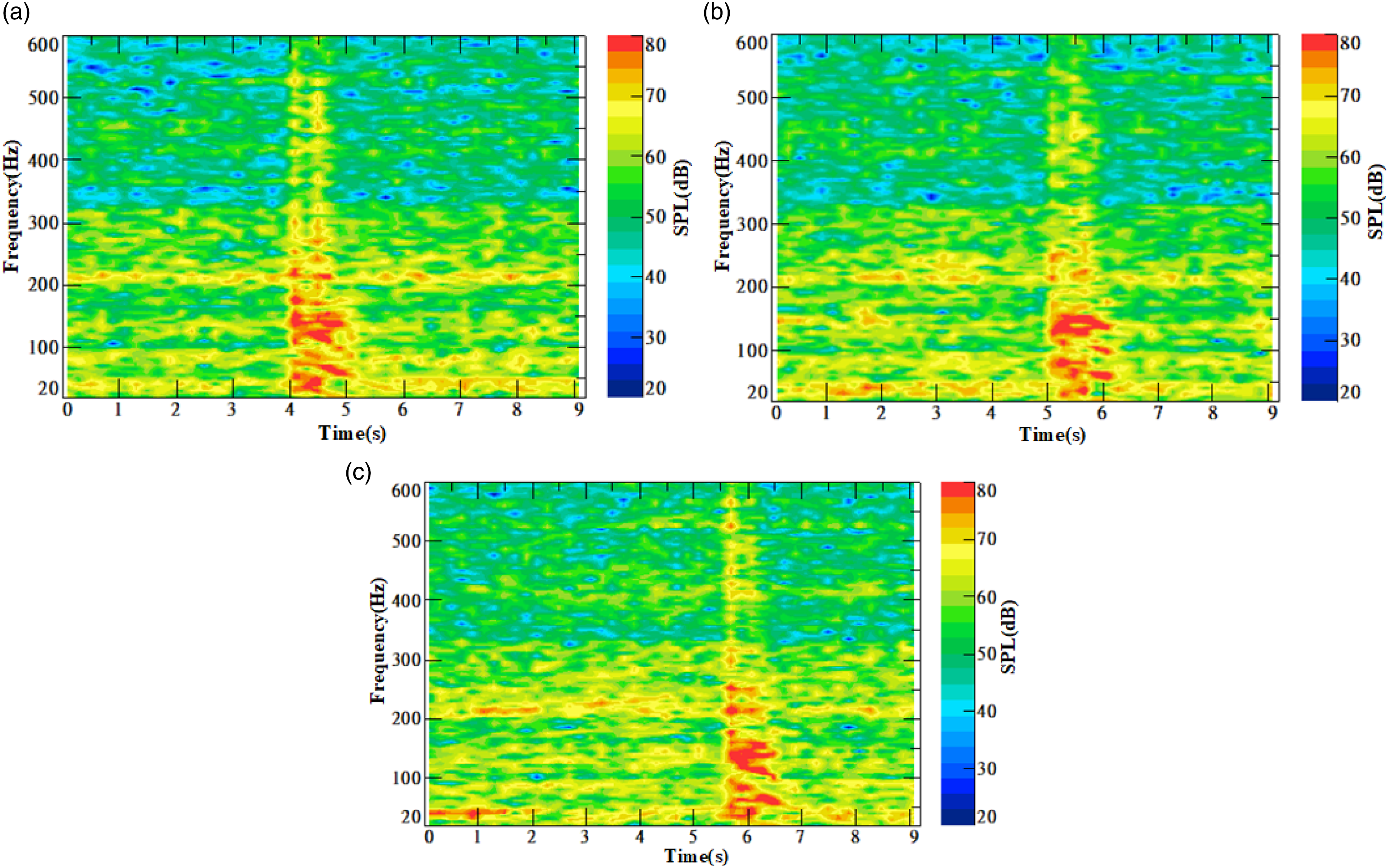
Figure 12 shows the ANC experimental platform, the MicroAutoBox III is the main controller, the laptop is used to build the algorithm model and establish communication with the MicroAutoBox III. The acoustic devices are arranged through the test rig. The ANC experimental platform.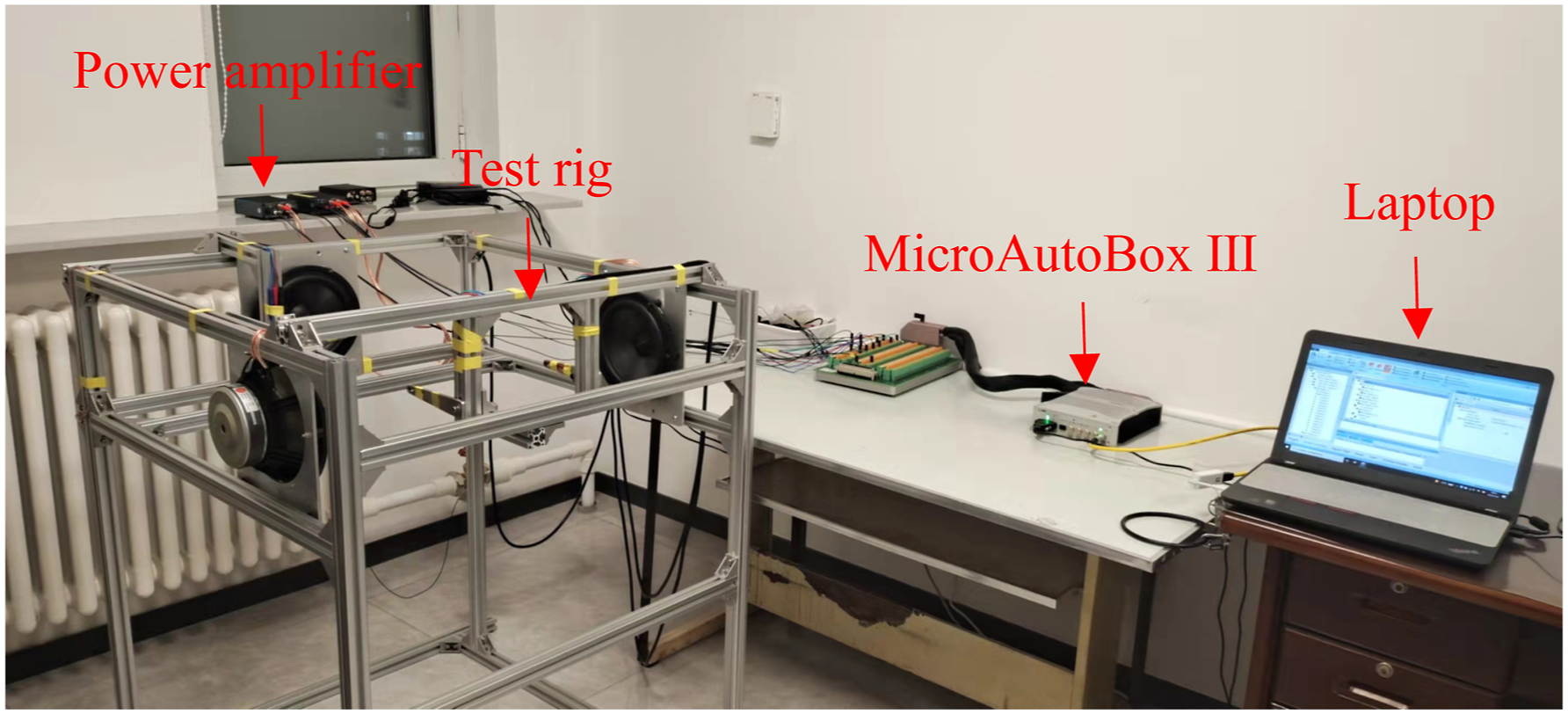
Figure 13 shows the mounting position of the acoustic devices. As shown in Figure 13, the test rig is equipped with three loudspeakers and three microphones, in this experiment, Loudspeaker 3 and Microphone 3 are not used. Loudspeaker 1 emits primary noise, the primary noise is the vehicle interior noise. Microphone 1 is used to collect the primary noise signal. Loudspeaker 2 emits the secondary sound, microphone 2 is used to collect the error signal. The MicroAutoBox III controls the Loudspeaker 1 and 2 to make the primary noise and the secondary sound. The sound signals from the MicroAutoBox III are amplified by the power amplifier and then passed to the loudspeakers. The sampling frequency is 8000 Hz. The secondary path is obtained by off-line identification. The frequency response of the secondary path is shown in Figure 5. The ANC test rig.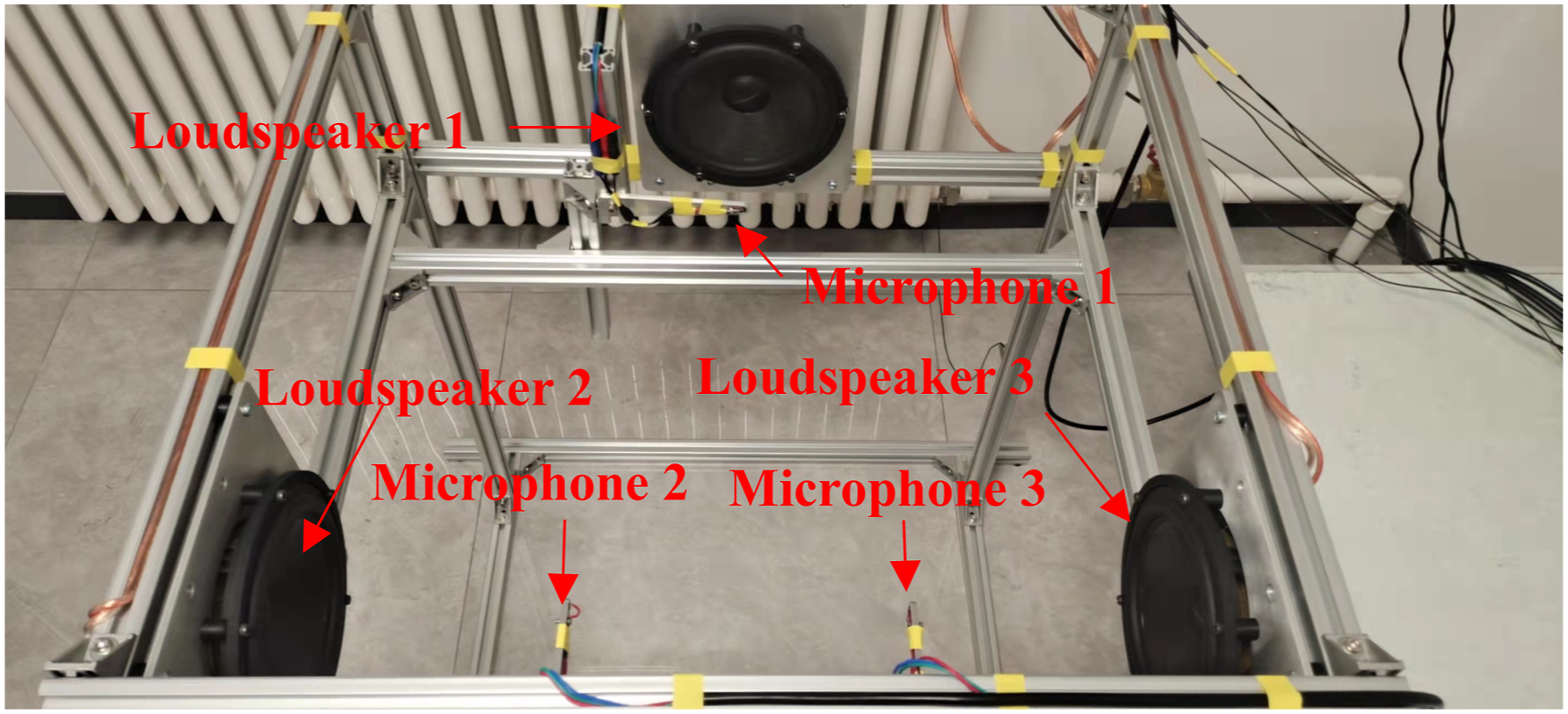
Experiment A
Summary of the step-sizes used in Experiment A.

Figure 14 shows the ANR results. As shown in Figure 14, the FXLMS, CHANC, and AMHANC algorithms have almost the same convergence rate. The convergence rate of the MVC-HANC algorithm is better than other three algorithms. The MVC-HANC algorithm proposed in this paper has the best steady-state performance, the ANR result is about −4.1 dB in the final stage of the iterations. For the same reasons as in Simulation A, the ANR result is acceptable. ANR curves for the Experiment A.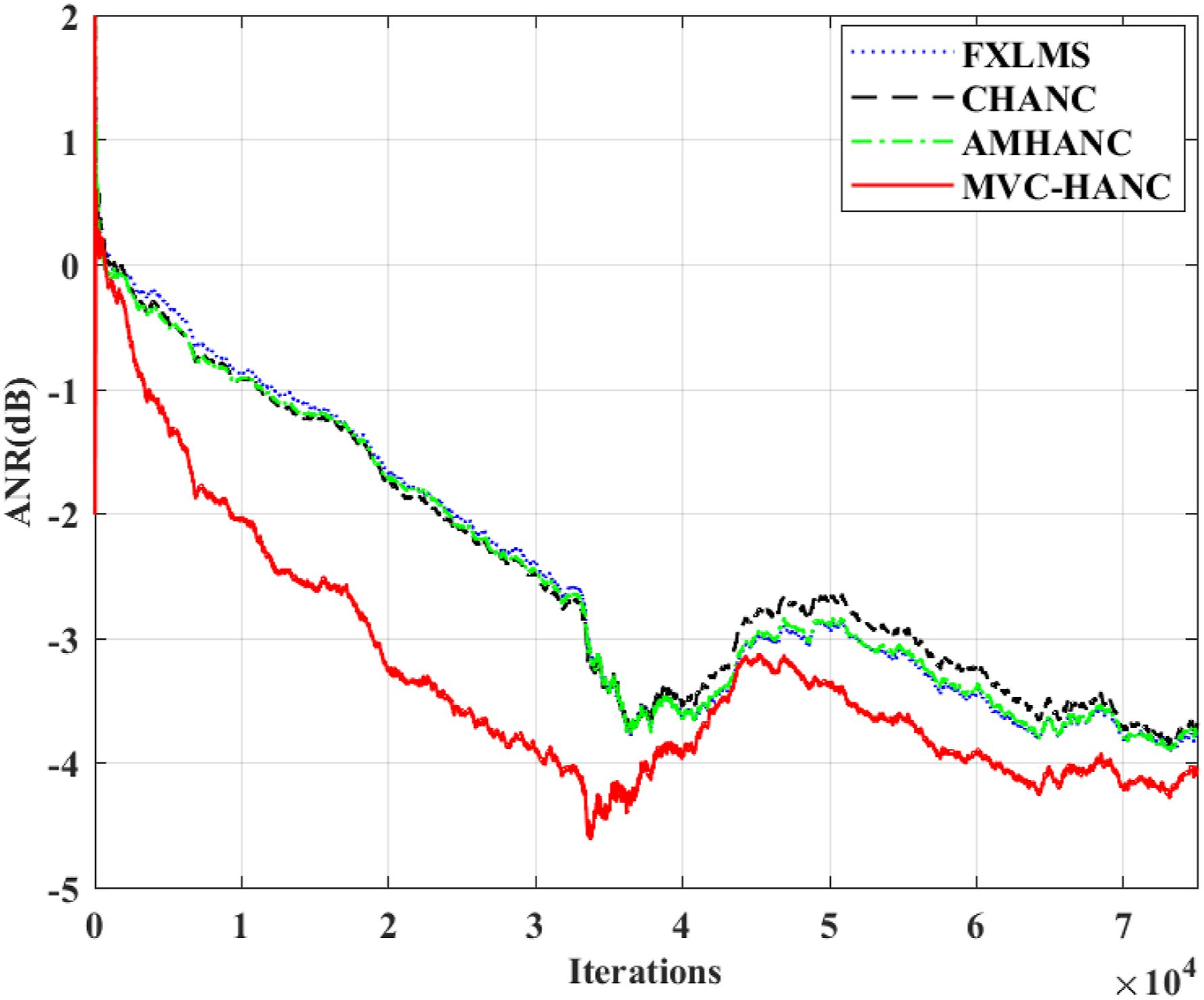
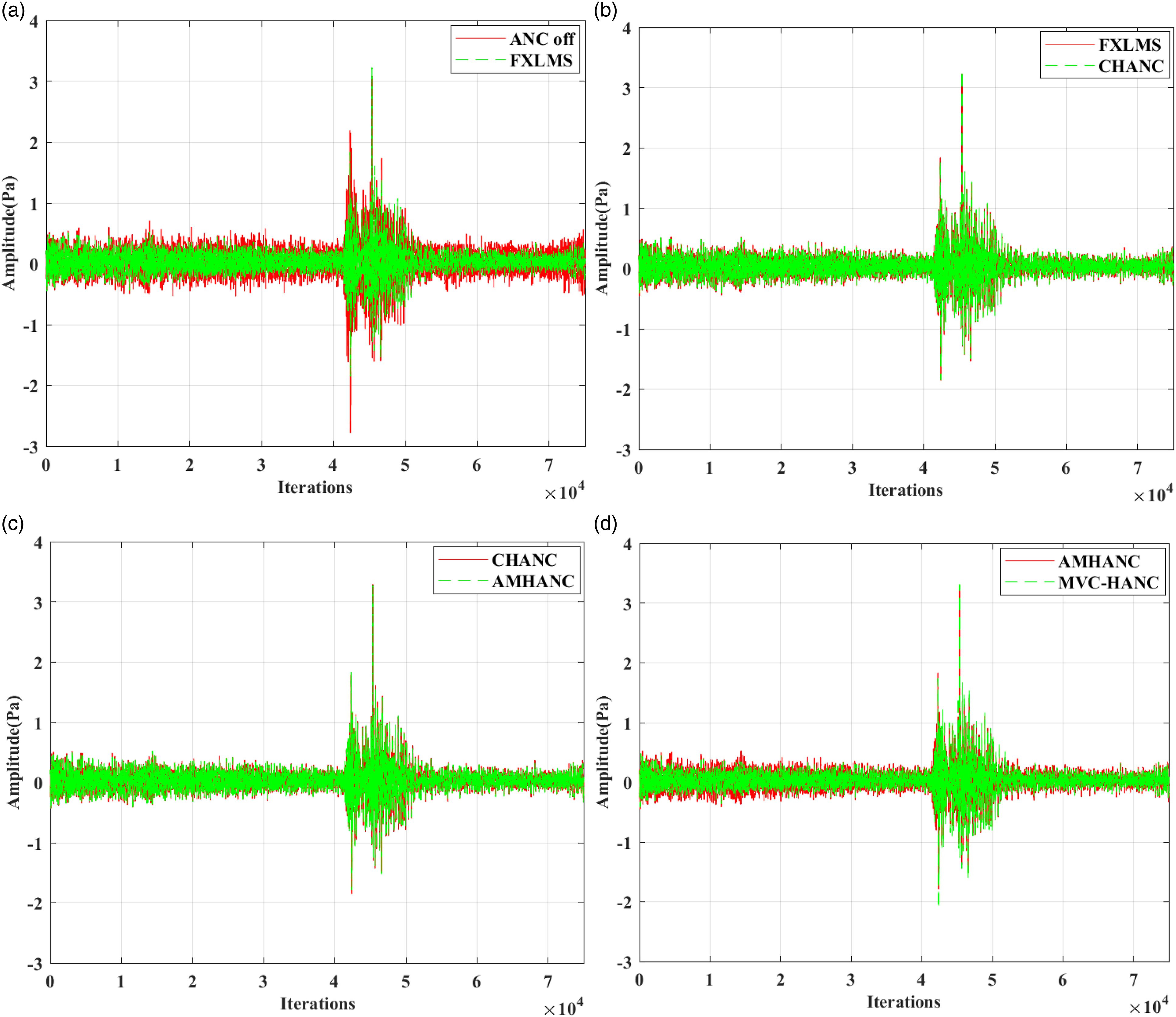
Figure 15 shows the comparison of the residual error signals when using different ANC algorithms to suppress the reference noise mentioned in Experiment A. As shown in Figure 15, after using the ANC algorithms, the residual error signals still exhibit the impulsive signal characteristic, but the significant noise attenuation effect of the ANC algorithm can be seen in the time domain. Comparison of the residual error signals using different ANC algorithms in Experiment A: (a) ANC off and FXLMS algorithm, (b) FXLMS algorithm and CHANC algorithm, (c) CHANC algorithm and AMHANC algorithm, (d) AMHANC algorithm and MVC-HANC algorithm.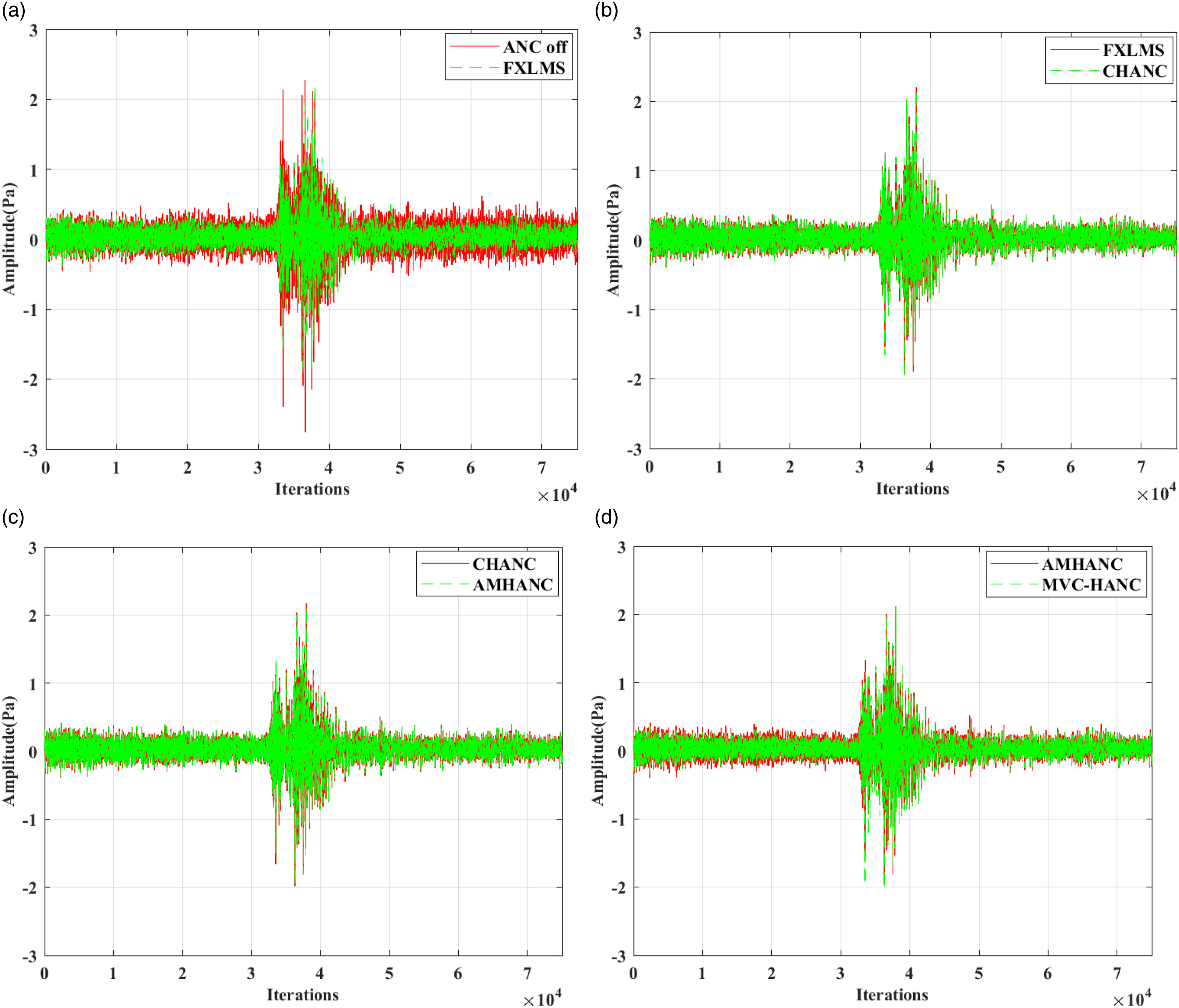
Experiment B
Summary of the step-sizes used in Experiment B.

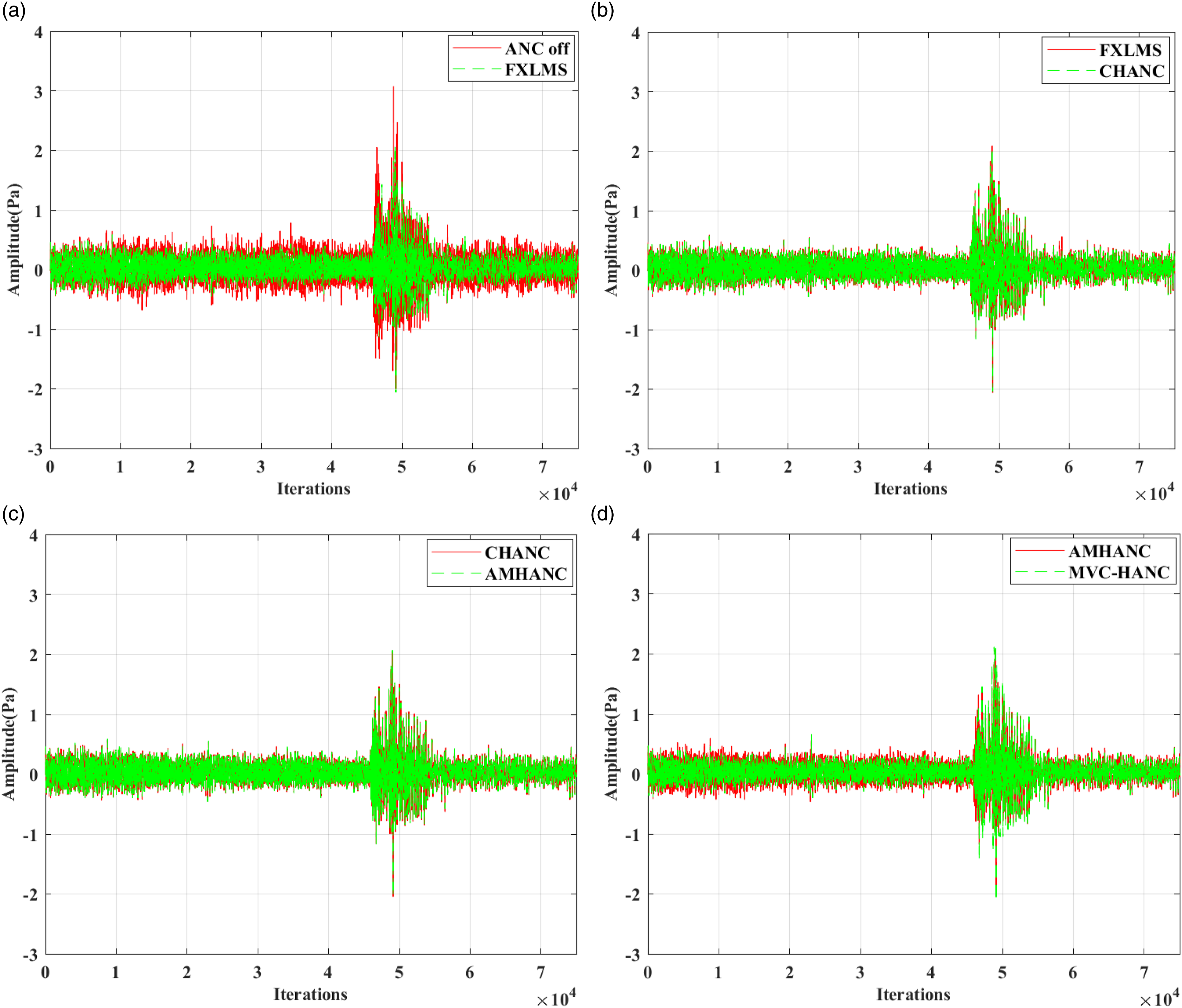
Figure 16 shows the ANR curves. As shown in Figure 16, the FXLMS algorithm has the worst convergence rate. The MVC-HANC algorithm has the best convergence rate. The MVC-HANC algorithm has the best steady-state performance, the ANR result is −4.1 dB in the final stage of the iterations. For the same reasons as in Simulation A, the ANR result is acceptable. Figure 17 shows the comparison of the residual error signals in Experiment B. As shown in Figure 17, the residual error signals still exhibit the significant impulsive signal characteristic. ANR curves for the Experiment B. Comparison of the residual error signals using different ANC algorithms in Experiment B: (a) ANC off and FXLMS algorithm, (b) FXLMS algorithm and CHANC algorithm, (c) CHANC algorithm and AMHANC algorithm, (d) AMHANC algorithm and MVC-HANC algorithm.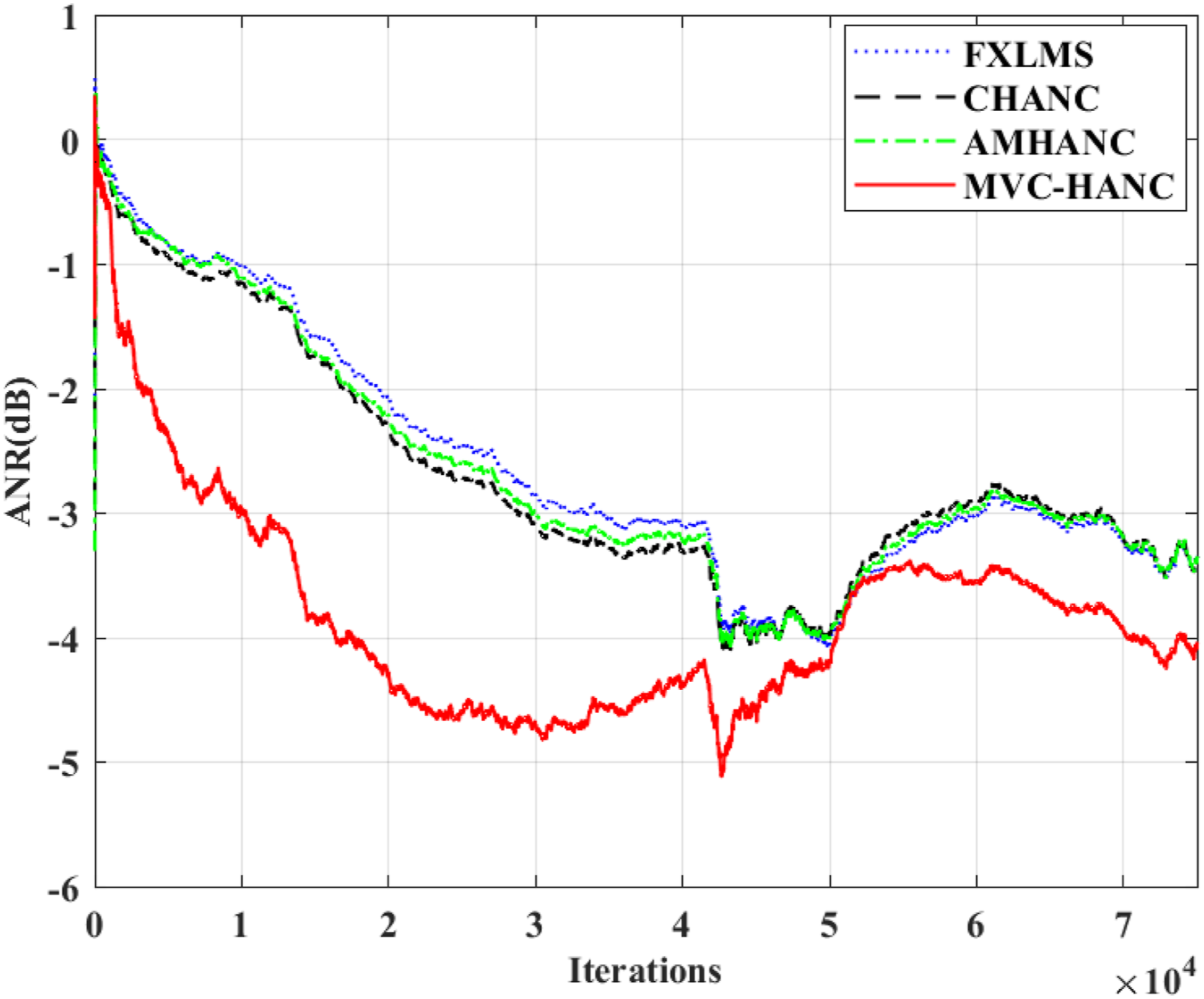
Experiment C
Summary of the step-sizes used in Experiment C.

Figure 18 shows the ANR curves. As shown in Figure 18, the FXLMS, CHANC, and AMHANC algorithms have almost the same convergence rate. The MVC-HANC algorithm has the best convergence rate. The FXLMS algorithm has the worst steady-state performance, the ANR result is −2.7 dB at iterations 7.5×104. The MVC-HANC algorithm has the best steady-state performance, the ANR result of this algorithm is −3.4 dB in the final stage of the iterations. For the same reasons as in Simulation A, the ANR result is acceptable. Figure 19 shows the comparison of the residual error signals in Experiment C. ANR curves for the Experiment C. Comparison of the residual error signals using different ANC algorithms in Experiment C: (a) ANC off and FXLMS algorithm, (b) FXLMS algorithm and CHANC algorithm, (c) CHANC algorithm and AMHANC algorithm, (d) AMHANC algorithm and MVC-HANC algorithm.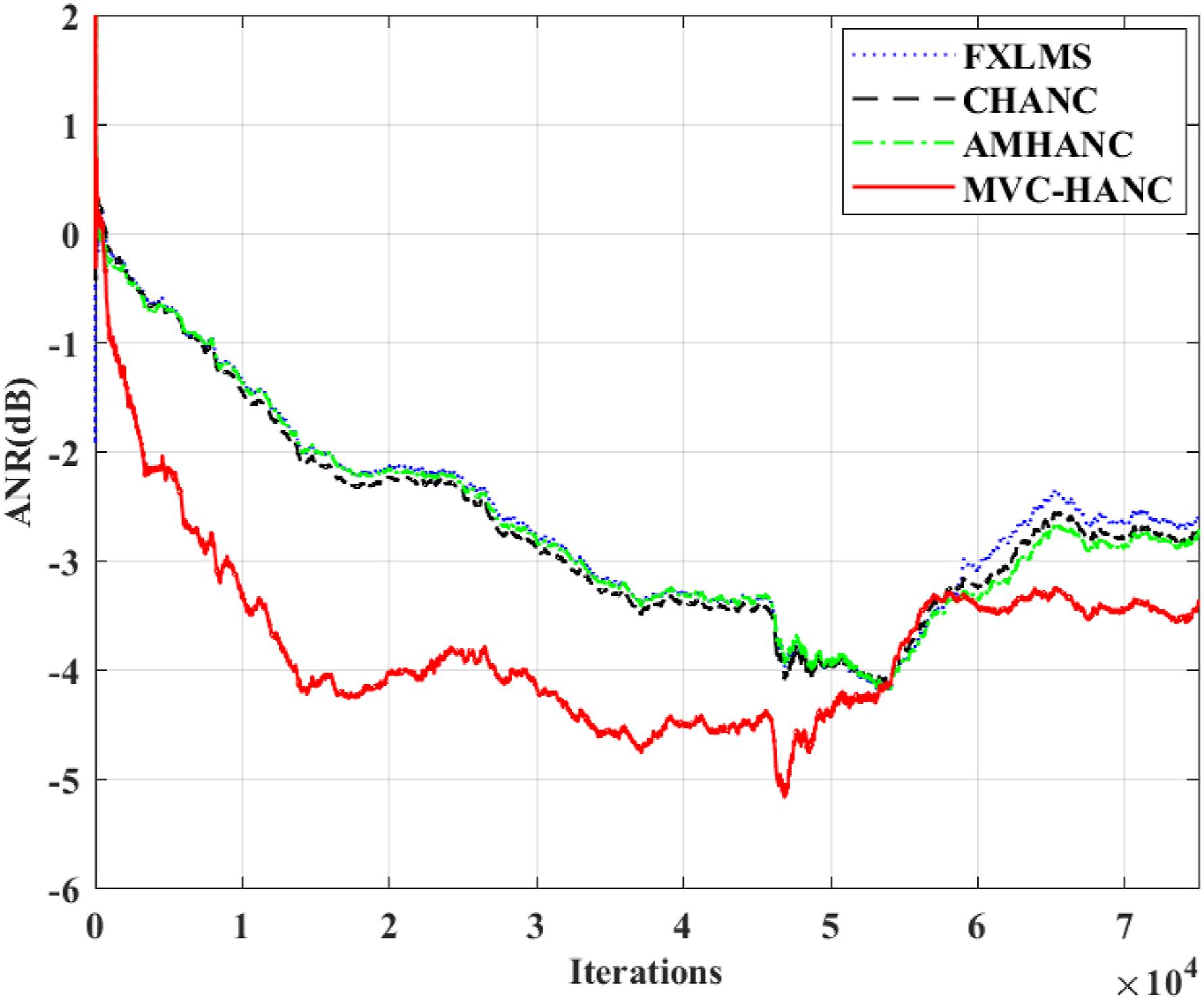
Conclusion
This paper proposes the MVC-HANC algorithm for the active noise control. In the section of Simulation results, the ANR results of MVC-HANC algorithm in the final stage of the iterations are −3.5 dB, −2.2 dB, and −2.0 dB, respectively. In the section of Experiment results, the ANR results of MVC-HANC algorithm in the final stage of the iterations are −4.1 dB, −4.1 dB, and −3.4 dB, respectively. The limitation of the MVC-HANC algorithm is that it has the high computational complexity. In future work, we need to reduce the computational complexity to ease the controller burden. We need to optimize the placement of acoustic devices to make the noise attenuation performance of ANC algorithm more obvious.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Natural Science Foundation of Chongqing, China (cstc2021jcyj-msxmX0152).